Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
7-2005
Dynamic characteristics of a hyperboloid shell of
revolution with application to flexible couplings
Brian G. Towner
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion in Theses by an authorized administrator of RIT Scholar Works. For more information, please [email protected].
Recommended Citation
Dynamic Characteristics of a Hyperboloid Shell of
Revolution with Application to Flexible Couplings
Approved by:
Dr. Hany Ghoneim
By
Brian G. Towner
A Thesis Submitted in
Partial Fulfillment of the
Requirement for the
MASTER OF SCIENCE
IN
MECHANICAL ENGINEERING
Hany Ghoneim
Department of Mechanical Engineering
(Thesis Advisor)
Dr. JosefT6r6k
Department of Mechanical Engineering
Dr. Kevin Kochersberger
Department of Mechanical Engineering
Dr. Edward C. Hensel
Department Head of Mechanical Engineering
J.
S. Torok
Kevin Kochersberger
Edward Hensel
I, Brian G
.
Towner, hereby grant permission to reproduce my thesis in whole
or in part. Any reproduction will not be for commercial use or profit.
Date:
0
t":f/d..
q
1
0
5
I
I
Rochester
Institute
ofTechnology
Abstract
Dynamic Characteristics
of aHyperboloid Shell
ofRevolutionwithApplication
toFlexible Couplings
Brian G. Towner
Advisor: Dr.
Hany
GhoneimAhyperboloidshell of revolution
(HSR)
isproposedfor implementationas acoupling,into a
fully
integrateddriveshaft/coupling
assembly.Thedynamicsofthecoupling isnotclearlyunderstood;whichpromptstheneed forananalyticinvestigationofthe hyperboloidshellofrevolution.
Thehyperboloid shell ofrevolutionisoneinwhichthemeridianoftheshellis defined
by
the equation of ahyperbola. Twomethods are utilizedtofindthefirstbending frequency
oftheHSR: Finite Element MethodandtheAssumed Mode Shape Method. The Finite
Element Method is appliedto Timoshenko Beam
Theory,
andGalerkin's Assumed ModeShape Method isappliedto the Kirchoff-Love
theory
ofthinshells. Bothmethods areTABLE OF
CONTENTS
Page
CHAPTER
1:INTRODUCTION
11.1
INTRODUCTION
11.1.1 COUPLINGOVERVIEW 1
1.1.2 TYPES OF COUPLINGS 2
1.1.3 COUPLINGSAND DRIVESHAFTS 3
1.1.4 APPLICATION OF COMPOSITES 4
1.2 DRIVESHAFT COUPLING ASSEMBLIES 7
1.2.1 GEISLINGER GESILCO ADVANCED COMPOSITE 7
1.2.2 INTEGRAL COMPOSITE SHAFT-COUPLING 10
1.2.3 COOLING TOWER COUPLING 12
1.2.4 LAWRIE DRIVESHAFT COUPLING 14
1.3 REVIEW OF HYPERBOLA 16
1.4 OTHER APPLICATIONS 16
1.5 PARAMETRIC STUDY 18
CHAPTER2:ANSYSMODEL 20
2.1 MODELING THE SHELL 20
2.2 RESULTS 23
2.2.1 DYNAMIC RESULTS 23
2.2.2 STATIC RESULTS 26
CHAPTER 3: TIMOSHENKOBEAM THEORY 29
3.1 MATHEMATICALMODEL 29
3.2 FINITE ELEMENT FORMULATION 31
3.3 RESULTS 35
CHAPTER4: SHELLTHEORY 38
4.1 METHEMATICAL MODEL 38
4.1.1 KIRCHOFF-LOVEASSUMPTIONS 38
4.1.2 MATHEMATICAL MODEL OF ASHELLOF
REVOLUTION
394. 1.2.A KINEMATICS 40
4.1.2.C FORCE AND MOMENT EXPANSION 43
4.1.2.D EQUILIBRIUM EQUATIONS 45
4. 1.3 MATHEMATICALMODEL OF THE HYPERBOLOID SHELL
OF REVOLUTION 47
4. 1.3.A KINEMATICS 47
4.1.3.B EQUILIBRIUM EQUATIONS 49
4.2 SOLUTION 52
4.2. 1 INTRODUCTION TO THE GALERKTN ASSUMED MODE
SHAPE METHOD 52
4.2.2 APPLICATION OF THE GALERKTN ASSUMDED MODE SHAPE
METHOD 53
4.3 RESULTS 57
CHAPTER5: RESULTSCOMPARISON 60
CHAPTER 6:CONCLUSION/FUTURE WORK 64
REFERENCES 66
APPENDIX A: HELPFUL TABLES 68
APPENDIX B: ANSYSBATCH FILES 70
APPENDIXC: MAPLEANDMATLABFILES 93
APPENDIX D: EXPANDED FORCES ANDMOMENTS 100
APPENDIXE: EXPANDED MATRIXELEMENTS 101
APPENDIX F: MATHEMATICAFILES 107
LIST
OF FIGURES
Figure Page
Figure 1.1: Three Typesof
Flexibility
[1]
1Figure 1.2:DirectionsrelativetoComposite Fibers
[4]
6Figure 1.3: Geislinger Gesilco Cl-design
[7]
8Figure 1.4: B-F Design
Coupling
[7]
8Figure 1.5: BI-Design
Coupling
[7]
9Figure 1.6: An integral compositedriveshaft
coupling
[5]
10Figure 1.7: Schematicof aComposite
Cooling
TowerCoupling
[9]
13Figure 1.8: Schematicof anIntegrated
Shaft-Coupling Assembly
14Figure 1.9: Geodesic LinesoftheHSR 15
Figure 1.10:
Geometry
(c &d)
defining
aHyperbola 16Figure 1.11:
Geometry
oftheParametricStudy
18Figure 2.1: Figure 2.1: HSR Model Generated
by
ANSYS 21Figure 2.2: The ANSYS Finite Element MeshofHSR 22
Figure 2.3: Ratioc/d vs. Natural
Frequency
for Fixed-Free HSR(ANSYS)
23Figure 2.4: Minimum Radius vs.
Frequency
for Fixed-Free HSR(ANSYS)
24Figure 2.5: Minimum Radius vs.First
Bending Frequency
for Fixed-FixedHSR
(ANSYS)
25Figure 2.6: Minimum Radius vs.
Bending
Stiffness Results 26Figure 2.7: Minimum Radiusvs.Torsional Stiffness 27
Figure 2.8: Minimum Radiusvs. AxialStiffness 27
Figure 3.1: Timoshenko Beam Differential Element 29
Figure 3.2: Fixed-Free Results
by
TimoshenkoBeamandFinite Elements 36Figure 3.3: Fixed-FixedResults
by
Timoshenko BeamandFinite Elements 37Figure 4.1: CoordinatesofShell
[10]
41Figure 4.2: DifferentialElementandStress 41
Figure4.3: Differential ElementwithUnitForces andMoments 43
Figure 4.5:
Bending
Natural Frequencies of aFixed-Free HSRby
Applying
theGalerkin MethodtoShellTheory
58Figure 4.6:
Bending
Natural Frequencies of aFixed-FixedHSRby
Applying
theGalerkin MethodtoShellTheory
59Figure 5.1:Fixed-FreeResults Comparison: ANSYS vs.TimoshenkoBeamvs.
Shell
Theory
61Figure5.2:Fixed-Fixed Results Comparison: ANSYSvs. Timoshenko Beamvs.
LIST OF
TABLES
Table Page
Table 5.1:Fixed-Free Results Comparison 60
NOMENCLATURE
A Area.
C Membrane Stiffness.
D
Bending
Stiffness.c&d Parameters
Defining
thehyperbola.E Young's Modulus.
fn
NaturalFrequency
(Hz).G Shear Modulus.
h ThicknessofShell.
I MomentofInertia.
K
Curvature.Kg
Gaussian Curvature.M Moment.
R>
Distanceto the meridian;perpendicularto thecenterline.Ri
Radiusof circumferentialcurvature.R2
Radiusofmeridional curvature.u,v,w Localdisplacementsofshell.
Ul,U2,Z Localcoordinate systemofshell.
V Shear.
e Strain.
P Density.
a Stress.
v Poisson's Ratio.
Chapter
1:
INTRODUCTION
1.1
INTRODUCTION
1.1.1
COUPLING
OVERVIEW
Inmost practicalapplicationsperfect alignmentof couplingsto machines, and/orshafts is
impossible.
Misalignmentscan occurbecauseof severalreasons including: thermalexpansion,
installation
error,deflectioncausedby
appliedloads,
andwearofbearingsandmachine parts. These misalignments causehighreaction
forces,
whichresultinvibration,noise,
bearing
failureand sometimesfailureof shafts. Thethreemainformsof misalignment [image:11.540.150.374.368.453.2]areangular, axial andlateral
[1]
as seenin Figure 1.1.Figure 1.1: Three TypesofFlexibility[1].
Themostbasic wayofconnectingtwomachines or shaftsis
by
meansofarigid coupling.Rigidcouplingscantransmit torqueand axialthrustbutare unabletohandleanyofthe
misalignmentspreviouslymentioned. Ifmisalignmentsexist, rigidcouplings can generate
highreaction forces. Thesereactionforcesmay induce noisy operation, increasedvibrations,
Duetomisalignment theneedarises fortheuse offlexiblecouplings, whichmustbeableto
transmit power and accommodatethemisalignments[2]. The flexiblecouplings must also be
abletooperate athighspeeds, andhandle
loads,
causedby
acceleration anddeceleration,
while
transmitting
powerandtorque.They
mustalsobeabletocompensateformovementofthe shaft,which oftenis inthe formof vibrations [3].
1.1.2
TYPES
OF COUPLINGS
According
to Johnson[1],
flexiblecouplingsgenerally fallundertheone offourcategories.Thesecategoriesare: Mechanical
Flexible, Elastomeric,
MetallicMembrane,
andMiscellaneous. Mechanicalflexiblecouplings arecategorized
by
loosefitting
parts,and/ortherollingorslidingofparts, togivethecoupling its flexibility. This categoryofcouplings
includesbut isnotexclusivetogearcouplings, chain andsprocket couplings,grid couplings,
andthebasic U-joint. Mechanical flexiblecouplingsmay haveahigh initialcost, andmost
require
lubrication,
whichisa majordisadvantageofthis typeofcoupling[1,
3]. Elastomericcouplings gaintheir
flexibility by
deformationof resilient elasticmaterials,including
plasticsand rubbers.
They
generallyfallunderoneoftwo categories: couplingsthat transmit torquein shear, andthose thattransfertorqueincompression. Acommoncompressiontypeis a
Spyder/Jawcoupling, and acommonsheartypeis aTyrecoupling. Other Elastomeric
couplings include: donut-typecouplings, pin and
bushing
couplings,andelastomericblockcoupling. Dueto theelastomeric materialproperties,couplingsthat functionincompression
vibrationdamping. Ametallic membranecoupling iseither madeupofmetallicdiscsor uses
a metallicdiaphragmto gaintheir flexibility. Thedisctypecouplinguses oneor more
discs,
which arealternatelyattachedto eachotherand/orinput and outputflanges. The diaphragm
typecouplingtakesadvantageofaflexiblemetal elementconcentricallyattachedto two
flanges
[1,
3]. Themetallic membranecoupling holdsseveral advantages.They
do notrequire
lubrication,
they
arerelativelytolerant to chemicals, andthey
havealong
lifeandtendnottowearlikeother couplingsbecauseoftheirlackofslidingcontact
[1,
2]. Thediaphragmtypecouplings accommodate axial angular andlateralmisalignments
depending
onthedesign.
Compositeshave beenusedinsimilarapplicationstometallic membrane couplings.
Composite disccouplingstakeadvantage of a pack ofdiscs made of composite materials.
Thecomposite material allowsthecouplingto haveahightorsionalstiffness,offershigher
misalignmentthana similarmetallicdisctype coupling, and also offers good
damping
[1,3].1.1.3
COUPLINGS AND DRIVESHAFTS
Modernenginesandtransmissions testthecapabilities ofdrive shaftsandcouplings [5].
Machines are
being
produced,whichareoperatingathigherspeeds andareoperatingmuchcloserto thenatural frequenciesoftheshafts and/or couplings[2]. Shaft andcoupling
combinations mustbe abletohandlemisalignments while
being
abletooperate athighspeeds, and
they
mustbelight inordertooperateathighnaturalfrequency
requirements[3,
5].
Along
withthe previouslymentionedrequirements;they
must alsobe aestheticallyForinitialanalysis of adriveshaftsimplysupported
boundary
conditionscanbeassumed.By
simulations it isobviousthat theshaftby
itselfdoesnotdeterminethenaturalfrequency.Motionoccurs attheattachment pointscorrespondingto thecouplings [5]. Thesemotions,
oftenbecauseofmisalignments, causesignificant reactionforcesontheshaft [1]. These
forcesare a result ofthestiffnessofthe coupling, andtherefore thestiffness mustbe found.
1.1.4 APPLICATION OF COMPOSITES
Thecombinationoftwoor more
distinctly
differentmaterials into anew materialisconsidered acomposite material. Oneofthematerials isusuallyafiber. Fibersare often
madeofglass or carbon,which are considerably strongand oftenhavemuchfewer defects in
fiber formthanin bulkform. Thefibersarewhat givethecomposite material muchbetter
stiffnesstoweightratiosthanothermaterials[12]. Fibersarevery strong intensionandare
themaincontributorto theultimate performance ofthe composite,but
they
alone areinsufficienttohandlecompression ortransverseloads. A
binder,
calledthe matrix, isusedtoholdthefibers together, and moldthefibers into acomposite component. Itisoften madeup
of a
thermosetting
resin, whichincludespolyester and vinylesterresins andepoxies. Thematrixhas bothadhesive and cohesivepropertiesthat allowloadstobetransferredbetween
the fibers. Thematrixisalso importantin protectingthefibers fromtheenvironment and
givingthecomposite resistancetocorrosion
[4,
12].Thefibersandthe matrixarebothimportantto thefinalcomposite component whileeach
Composite
technology
is growing rapidly inthepowertransmissionindustry,
mainlybecauseofits advantages over metals. Whencomparedto metals, compositeshave higherspecific
strength and specificstiffness, have littletonothermal expansion, and areresistantto
corrosion[12].
They
also allowforengineeringtailoring
ofadesign,
simplyby
changingtheorientation angleofthefibers. Thisallows aparttobedesignedwithdesireddynamic
characteristics. Composites' higherspecificstiffness results in highernaturalfrequencies
[6]. Thisallowsforpartstobe designed withamuchlargerrange of operation. Dueto these
advantages, someofthefirstapplicationsof composites wereintheaerospace and cooling
tower-coupling
industries,
and now arefinding
theirwayinto commercial industry. Theseadvantageshave leadto theuseof compositesin driveshafts and make composites agood
materialforusein flexiblecouplings [4].
Theuniqueproperties of composites arethesame propertiesthatmaketheiranalysis
difficult.
Materials,
suchasmetals,havemechanical propertiesthatareisotropic. Materialsthatareisotropic havemechanical propertiesthat areindependentofthedirectionconsidered.
Composites are consideredtobeanisotropic;
therefore,
themechanical properties ofacompositedependonthedirection considered. Thisphenomenonis dueto the makeupofa
composite material. Considera single
layer,
orlamina,
ofafibrouscompositematerialwhere fibersareimbeddedparallelto thex-axis intoamatrix. Thelaminawillhave a much
greater resistanceto
loading
inthe x-direction, thanintheyorz-direction,dueto thefactthatthefiberswillbeaxial
loaded;
therefore,themodulus ofelasticitywillbemuchhigher inthex-direction(or longitudinal
direction)
thanintheyor z-direction(or transversedirection)
TRANSVERSE
LONGITUDINAL
Figure 1.2: DirectionsrelativetoComposite Fibers [4].
Sincethestrengthofthelaminaismuchless inthe transversedirections alaminateneedsto
becreated. Alaminate iscreated
by
stacking laminawithdifferentfiberorientations. Nowthecompositemay handleloadsinthedesired directions [12]. It is importanttonotethat
by
designonedirection may bestrongerthananotherbut for stabilityandrigidityofthefinal
part, alldirectionwillhave some strength. It istheabilityto arrangethefibers indifferent
ways thatmakes composites unique. Thestrength and overall characteristics ofthefinal
product canbealtered
by
arrangingthe layersofthecompositeatdifferentangles [4]. Theseanisotropic propertiesthatresult fromthedifferentarrangements oflayers are whatallowus
totailor the designtomeettherequirements oneis
looking
for [1 1].Laminateplate
theory
isthecornerstone oftheory
and analysis ofcomposites. Thistheory
relates thestiffness and strain of eachlayertoproperties ofthefinallaminate. Asinglelayer
orlaminacanbe defined
by
properties found analyticallyorby
experimentation. Thenby
rigorousmathematical
theory
thedifferentpropertiesofthematrix canbe found. Thestrain1.2
DRIVESHAFT COUPLING
ASSEMBLIES
1.2.1 GEISLINGER GESILCO
ADVANCED COMPOSITE
TheGeislinger Gesilco advanced composite coupling, is verysimilarto ametallicdiaphragm
coupling. Geislingerwasthe firstto produce acomposite misalignment couplingtobeused
intheshippingindustry. Thisapplicationisforuseonship drive lines betweenengine and
gears,orbetweengears and water-jet. Theirgoalwastoproduceacouplingthatwouldbe
first
torsionally
stiff, as wellas,beabletohandle highmisalignments.Also,
thiscoupling ismeanttohavegood soundinsulationand reducethedeadweight ofthecouplingandinturn
reducethemass momentofinertia. Ifthecouplingcould meettheserequirementsitwould
help
meettheneeds oftheshippingindustry
that thriveson weight savings. Themore weightthatcanbesavedthemore payloads canbecarried andthefastertheshipscantravel [7].
A verygooddesignoverviewis giveninthepaperin its General Design Concept section.
Thecomposite coupling isa membranecoupling designedtomeet several requirements.
Someoftherequirementsinclude:
being
abletooperatebetween 100and 3000rpm,having
at leasta20000 hourservice
life,
mustbeabletohandleatorqueof300kNm,
and mustbeabletohandlea3 degreeangleofdeflection [7]. Itis importanttonotethat this isnot an
integralcomposite shaft couplingassembly.
Therearetwomain coupling
designs,
aswellas, a combinationofthe twodesigns. Thefirstdesign,
theCl-design,
ismadeupoftwo membranes anda shaft attheinner diameterofthemembranes. AdiagramoftheCl-designis shownin Figure 1.3. Themembranes are
1
Figure13: Geislinger Gesilco Cl-design [7].
The second
design,
theBF-(Butterfly)-design,
consists ofintermediateshafts arranged ontheouterdiameterofthemembranes. Thetwohalvesofthecouplingcanthenbeboltedtogether
anddifferent sizedwashers canbeused to
help
compensatefor anyaxialmisalignment.Figure 1.4: BF-DesignCoupling[7J.
Acombinationofthe two couplingsiscalledtheBl-design. Themain advantage ofthe
BI-designallows the coupling tobeattachedtotheengines flywheel
by
theCl-part andto a [image:18.540.186.352.83.183.2] [image:18.540.194.349.341.474.2]Figure 1.5: BI-Design
Coupling
[7].The compositecouplingismade
by
meansoftheprepeg/auto clave manufacturingtechnique.Thismethod was chosenbecause itoffered goodreproducibilityand it isableto yield ahigh
fibervolume contents. Eachlayerofthelaminate ismade-upofE-glassorcarbon
unidirectionalprepregtapes. Thedesignofthecomposite membraneusedinthecouplingsis
unique. Thecross-section ofthemembraneistapers towards theouterdiameterandis
corrugated. Itwasfound
by
simulation and experimentationthat thisdesignyields ahigherdeflectionwithlowerstiffnessthanaflattaperedmembrane. Thelowerstiffness yields
muchlowerreaction forces [7].
Thedesignerofthecoupling decided using finiteelement analysis,
by
meansofthesimulation program
ANSYS,
andwas asuitabletool foranalysis. Theauthordidmentionthat thereisaneedforagood,reliable means of analysisfora composite membrane loaded
inthismanner. Theresultswerelatercompared against experimentaldata. Acoupleof
assumptionswereusedintheanalysis.
First,
itwasassumedthatinthemodelthesingleseemstocorrespond closelyto theFEAresults it is possibletooptimizethecomposite
couplingusingtheFEAmodels [7].
Since 1993 morethan500 ofthesecouplingshave been inservice. Theoldestcoupling has
been running forover 16000hourswithnoproblems. This couplingisused on afast
ferry
thatwasbuiltinaSpanish shippingyard. Itseems so farthatdesignanddevelopment of
theseparticular composite couplingshasbeena success [7].
1.2.2 INTEGRAL COMPOSITE SHAFT-COUPLING
Apaper
by
Faust, Hogan, Margasahayam,
andHess[5]
givesanoverviewof anintegratedcompositedriveshaft andcouplingsthatwereintheprocessof
being
developed. Theauthorsstatethat thecombiningoftheshaft couplings isunusual andunique. Thepart described is
firstmadeof a shaft whichisconstructedusingbraided-fiberglass. Thecouplingsarethen
integrally
braided intothepart.Finally
theprocessiscompletedbemeansof resintransfermolding. The designoftheintegralshaftand couplingmust meet severalstrictdesign
criteria. Someofthemostcriticalareas follows. Thepartmustbeableto transmit 1200
hp
at23,000rpm,must operateintherange of1 6,000to 26,000rpm, and musthavea natural
[image:20.540.187.358.579.668.2]Severalequations arelistedthatwereusedinthepreliminaryanalysis
by
Faust, Hogan,
MargasahayamandHess. Theseequations includewaysof
finding
torsional stress,flexuralstrain,
buckling,
andbending
stiffness. Theseequations areallbasedontheassumption ofisotropicmaterials,whichleadto error when usedforcomposite materials.
Thus,
they
areonlygiventoprovide somedirectiononhowthepart needstobelookedat.
Instead,
allanalysis is done
by
meansoffiniteelement analysisusing PDA/PATRAN andMSC/NASTRAN,
andby
testing
[5].Ina parallelpaper
by
MargasahayamandFaust[8],
adetailedoverview ofthe3D finiteelement analysisdoneonthecouplingisgiven. Finite element analysis was chosenmainly
becauseofthe anisotropic nature ofcomposites, anddueto thefactthat thematerial
propertiesdiffer frompointtopointinthecoupling. Finiteelement analysis was also avery
effectivewayof
finding
thebending,
axial andtorsionalstiffnessinorderto aidinthecritical speed calculationsoftheshaft coupling.
Using
CADAMa2D crosssectionwasdevelopedwhich was used asthebasis fora3D Finite Elementmodel. Duetosymmetry
only halfofthe Shaft couplingwasmodeled. Fortheactualanalysis, and for plotting
displacementand stress PDA/PATRANwas utilized. Themodelwasbroken into 8material
zonesto compensateforthevarying fiberanglesin eachlamina. Themodelwasbroken into
solid,
8-node,
rectangularhexahedralelements. Solid brickelements were utilized insteadof2Dshell elementsforseveralimportantreasons including: braided laminateisrelatively
thick,
interlaminarstresses wereofaconcern,they
were usedtomodel eachlayer,
itmakes itconcern. Thematerialpropertiesinput intotheprogramwerethecalculatedequivalent
mechanicalpropertiesofthe
laminate
[8].Following
thefiniteelement analysis, testswereperformed onfull-scaleprototypes oftheshaft coupling. Theshaftcouplingwasloaded inthreeseparatetestsin
bending,
axialtension,
andtorsion. Straingauges were placedinthemain areas ofinterest basedonfindings
ofthefiniteelement analysis[8].Bothpapers concerningthisshaftcouplingdiscusstheresults fromthefiniteelement
analysis and
testing,
bothofwhichfall verycloseto one another. Dynamiccharacteristicsarediscussedbutnotingreat
detail; however,
animportantnoteisthat theshaft alonedoesnotcontrolthenaturalfrequency. Insteadconsiderablemotionduetomisalignments ofthe
attachmentpointsofthecouplingstomachineshas agreat effect. Diaphragm
bending
ofthecouplingsresults insignificant lateraland radial stiffness. Oneimportantnotiontakenfrom
thepaperisthat atthe timeoftheirdevelopment
they
hadtorelyontesting
andcomputerFEA,
becauseofthelackofbetteranalyticalunderstanding [5].1.2.3
COOLING
TOWERCOUPLING
Composite driveshafts and flexiblecouplings havealsobeenusedextensively inthecooling
tower
industry
[9]. Anexample isshown onFigure 1.5. Driveshafts made of compositesfilament
windingprocess.Composites
were usedbecausethey
yieldedpartsthatwere muchlighter,
stronger, stiffer,andtheirdesignscouldbetailoredto meet specific applicationrequirements. Thecompositecomponents also yieldedhighertolerance to misalignments,
are more resistanttocorrosion, causinglowerloadson
bearings,
are moreresistanttofatigue,
and show nothermal expansion. Thecompositespacertubesarealso ableto spanmuch
longer
distance,
which allowsfor usingfewer flexiblecouplings and supportbearings. Thesecouplings are also ableto transmitgreatertorque than theirmetalcounterparts, andtherefore
canbedesignedtomeet speed requirements ratherthanstrength requirements [9]. These
couplingshaveproventobealowmaintenance solutiontoproblems associated withcooling
towerdrivesystems [4].
ait sntatiss stoolmui
K-SOO UQHCL Fi
Figure 1.7: Schematicof aComposite
Cooling
TowerCoupling
[9].Thepaperthengives agooddescriptionofthe loadsthemisalignment couplings must
sustain.
First,
the couplingmustbeabletohandlestaticandvibratorytorque. Atthesametime it musthandle 3typesof misalignment: axial, radial, and angular. Theangular and/or
1.2.4 LAWRIE
INTEGRAL
DRIVE SHAFT COUPLING ASSEMBLY
The Lawriedriveshaft consists of a shaftandtwoflexiblecouplings integratedintooneunit.
The integratedshaftcoupling ismade fromcomposites and ismanufacturedusing the
filament windingprocess. Flanges areattachedto assemblyaftermanufacturing [34]. The
basicshapeofthe
integrated
shaftcoupling assembly is shownin Figure 1.8.Figure 1.8: Schematicof anIntegrated
Shaft-Coupling
Assembly.Similartothepreviously describedshaftcouplingassemblies, it iscriticalthattheassembly
beabletohandlehigh
torque,
whileallowingflexibility
in-bending. Theflexibility
isobtained
by
meansofthecouplingportions oftheassembly.Thisthesis focusesonthecouplingportionofthe assembly, andservesto
lay
thefoundationforfutureworkinthis area. Itwill consider aportionofthecouplingwhose shapeisdefined
by
ahyperboloidshellof revolution(HSR). Geodesiclines,
made offilaments,
createtheshape ofthe coupling, intheassembly. Thesearestraightlinesthatdesignatetheshortest
surfacelinebetweentwopoints onthecurvedsurfaceoftheHSR. Asfilaments are added
Figure 1.9:GeodesicLinesoftheHSR.
Theinherent shapeofthisprocessisthatofahyperboloidshell of revolution
(HSR);
whosemeridianis defined
by
ahyperbola. Dueto theinherent complexityofcompositesandHSR,
thisthesiswillfocus on
finding
thedynamiccharacteristicsof athinHSR(thickness= .001in)
madeof anisotropicmaterial.Specifically,
thematerial chosenintheanalysisoftheshellwas
Aluminum;
therefore,thefollowing
properties were used:p=2.55x1 0-4
lbf
s2 /in4,
E=
10x\06psi,
1.3
REVIEW
OF
HYPERBOLA
Themeridian ofthe
hyperboloid
shell isnaturally definedby
ahyperbola,
whoseequation is [image:26.540.191.337.145.318.2]presented in Figure 1.10.
Figure 1.10:
Geometry
(c&d) definingaHyperbola.As canbeseenfromFigure 1.1
0,
canddare constantsthatdefinea rectangle whosediagonals formtheasymptotesofthehyperbola[16].
Changing
one orbothofthesevalueschangesthe curvature ofthehyperbola. Basedonthisgeometricrelationship, theparametric
study, outlinedinChapter
Two,
is developed.1.4
OTHER APPLICATIONS
Thereareother applicationto Hyperboloid Shellsof
Revolution,
including
watertowers,
TVtowers,
structuralsupports,factory
chimneys, anddesignsofbuildings. Themost commonmaybethe applicationofcoolingtowers. Thisshapewas chosenforthecoolingtowers
Countlesspapers canbe foundontheanalysisofcoolingtowers. Thisanalysisfocuses
mainlyonthe
buckling
and vibrations ofthecooling towers.Early
work, likethatdoneby
Carter
[26]
andNeal[25],
weredoneby
means ofbasicshelltheory
andby
extensiveexperimentation. Muchofthisresearch wasdoneininterestto failureofcoolingtowersin
the 1960s
[25,
26]. Carterexplainsthatmuchoftheearlyexperimentation wasdonewithinsufficient
boundary
conditions,leading
to errorinresults. LateranalysisofcoolingtowersfocusesontheuseofFinite ElementAnalysis. Examplesofthiswork
include,
butare notlimitedto,workdone
by
Aksu[24],
andTan [27].Also,
general workthatmentionsapplicationtohyperboloids
includes,
butisnotisnotlimitedto,
workby
Lee& Bathe[30],
and
by
FanandLuah [30].Theanalysis inthis thesis is different when comparedto analysisdoneintheprevious
mentioned papers and similarliterature. Oneoftheobviousdifferencesisthat theflexible
coupling isconsidered symmetric about whatwouldbethex-yplainin Figure 1.10.
Cooling
towers aregenerallymuch longeron one sideofthe
throat,
wheretheminimum radiusislocated. More
importantly
no literaturecouldbefound,
thatstudiedtheaffectsofchangingtheparametersonthenatural
frequency
ofthehyperboloid. This isthemainfocusofthisthesisasisexplainedin Chapter Two. Theanalysis is conducted
by
means ofbeamtheory,
1.5
PARAMETRIC STUDY
Inorderto study how changingtheHSRaffectsitsnatural
frequency,
aparametricstudywasset up. Ofmostimportancetheaffect ofchangingtheminimum radius oftheHSRwas
consideredforthis thesis.
Forthisstudyawindowwas setupwhere
L^
andRm^
weresetto6 inchesand 3 inchesrespectively, as shownin Figure 11.1. Thevalueof
Rmin
(c intheequation ofthehyperbola)
waschangedin.25 inchincrements. Thisalsorequiredthevalue of
d,
intheequation ofahyperbola,
tochange accordingto Equation 1.1.*\
U Lmax=6 00J
A
[image:28.540.172.371.314.507.2]Rmax=3.00
Figure 1.11:GeometryoftheParametricStudy.
d=
\c*z
Aspreadsheet was createdin Excel inordertoefficiently findthechangingvaluesofthe
variable
d,
whilechangingR,jn
(c). Thisspreadsheet canbe found in AppendixA,
and wasutilizedthroughout the thesis.
Theparametricstudywas conducted
by
threemethods. Thefirst isby
use ofthefiniteelementprogram
ANSYS,
whichwas usedtoprovide abaseline forresultsandtogivesomeinitial insight intotheproblem.
Second,
theHSRismodeledby
Timoshenko BeamTheory,
and solvedfor
by
the finiteelement method.Third,
theHSRismodeledby
ShellTheory
andcorrespondingresultsobtained
by
theGalerkin Assumed Mode Shape Method.Last,
resultsof
bending
naturalfrequencies,
fromallthree,arecomparedto one another.The
boundary
conditions appliedto theHSR,
arefixed-freeand fixed-fixed. Theendsthatarefixedwillbeconsidered cantilevered, and application ofthe
boundary
conditions isCHAPTER 2: ANSYS MODEL
2.1
MODELING
THE
SHELL
AparametricstudyoftheHSRwas performedusingthefiniteelement program
ANSYS,
version 8.0. Thiswas donetoset abasis forthestudy. In Appendix
B,
batch files(log
files)
canbe found for modelingandanalyzingallthecasesdiscussedwithin. The Batch files may
becopied and/or modifiedforspecificcases, andthenrunin ANSYS 8.0.
Inordertocorrectlymodelthe
HSR,
thehyperboladefining
themeridianhadtobecreated.Thiswas done
by defining
one-half ofthecurve,firstby
6key-points,
andthenby
a splineconnectingthepoints. The key-pointswereplottedaccordingto theequation ofthe specific
meridian, wherezis theindependentvariable,and
Ro
is thedependentvariable. The "splinewith
option"
command was usedtocreate halfofthemeridian
by
connectingthekey-points,
and
defining
the slopesatthebeginning
and end ofthecurve. The linewasthenreflectedtocreatethefull meridian,andextruded360 degreestocreatetheHSR.
Figure 2.1 shows anexample oftheshell modeledin ANSYS. The Tables found in
Appendix Awere usedtoquickly findthepoints
defining
thelineandtheslopes attheend ofthespline. Thesevaluescanbetakenfromthespreadsheetandchangedwithinthebatch
Figure2.1: HSR ModelGeneratedbyANSYS.
Theelement used intheANSYS analysis was Shell93. Thisisan8-Nodestructural shell
element. Eachnodehassixdegreesof
freedom,
including
bothtranslationand rotation.According
to theANSYS tutorial,this elementissuited for modelingcurved shells.A preurninary studywasdoneinordertodetermine asufficient number ofelementstomesh
theHSR. It wasfoundthat 20elementsalongthelengthand 16circumferential elements
weresufficienttoget consistentresults, forafixed-free HSR. Forthefixed-fixed
HSR,
thenumberof elements alongthelengthwasincreasedto30toobtain moreconsistent results.
[image:31.540.109.429.56.295.2]Figure2.2: The ANSYS Finite Element MeshofHSR.
During
thestudy itwas alsofoundthatR^
valuesbelow 1inch,
forthefixed-freeHSR,
andvalues of
Rmin
below 1.25inches,
forthefixed-fixedHSR,
gaveinconsistentresults.Refining
the mesh, and/ordefining
acompletelynew mesh resultedin veryrandomresultsandmodeshapes wereunclear. Thiscouldbe duetocoupling betweenmodes and/orthe
increaseofcurvature,orthat the element used could nothandlethehighcurvature. Atrend
canstillbe foundwhenreviewingthe finalresults oftheANSYSstudy.
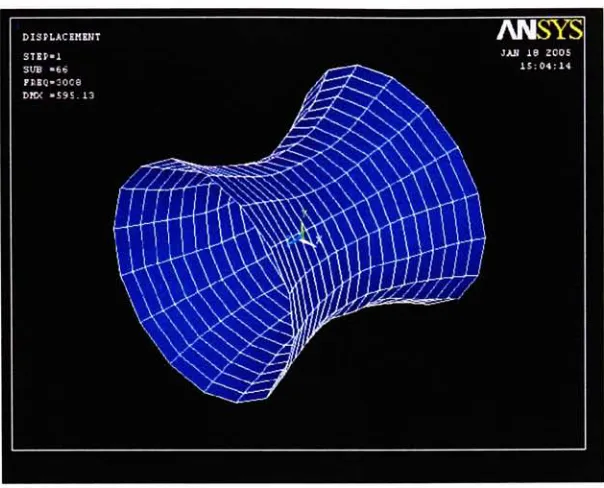
A dynamic studywasperformedontheHSRinANSYS. Thefirst
bending, longitudinal,
andtorsionalnaturalfrequencies forthefixed-free HSRandthe first
bending frequency
forthe [image:32.540.119.421.55.299.2]Acylinderoflengthandradius, 6inchesand 3 inchesrespectively,was simulated in
ANSYS. The Batchfilecanbe found inAppendix B. Thiswasdonetoinvestigatewhether
or nottheHSRresults wereconvergingto theresultsofa cylinderwithan
increasing
Rmin. Itwas foundthat theHSRresultsdid indeedconvergetoa cylinderwith
increasing
Rmin,
as shownby
thefollowing
results.2.2
RESULTS
2.2.1
DYNAMIC RESULTS
Below,
inFigures2.3 and2.4,
arethefixed-freeHSR ANSYSresults. Figure 2.3 showsthenaturalfrequenciesversustheratio c/d(c=
Rmin),
whileFigure 2.4showsthenaturalfrequenciesversusthe minimum radius. An
increasing
c/d in Figure 2.3 correspondsto thedecreasing
Rmin
ofFigure2.4. 90UU [image:33.540.64.482.397.680.2]>> u c
3
O"
0) 9000
8500
8000
7500
7000
6500
6000
5500
5000
4500
4000
3500
3300
2500
2000
1500
1000
500
0
First
Bendng
First Torsional
RrstLcngjtudnal
0 0.25 0.5 0.75 1.25 1.5 1.75
Mnimm Radius(in)
[image:34.540.77.476.63.357.2]225 25 275
Figure 2.4: Minimum Radiusvs.Frequencyfor Fixed-Free HSR (ANSYS).
Itwas expectedthat as
Rmin
decreased (andc/dincreased),
theHSRwouldbecome lessstiff, andthenaturalfrequency
would decrease. Thispatternisdemonstrated only forthe torsionalFigure 2.5 showsthefundamental
bending frequency
of afixed-fixedHSR,
from ANSYS.Consistentresults wereonlyobtainedupto
IU,
of1.25inches. Theresultsdemonstrateanincreasing
naturalfrequency
withdecreasing
Rmin- Contrastto thefixed-freeresults (Figure2.4)
thebending
naturalfrequency
doesnotdecreasewithdecreasing
Rmin-12000
10000
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2 2.25 2.5 2.75
Rmin(in)
2.2.2 STATIC RESULTS
Astatic studyofthe fixed-freeHSRwas also performed. Fromthestaticanalysis the
stiffnessofthecoupling as afunction
Rmin
wasfound,
which wouldbe helpful forthedesignoftheintegrated shaft-couplingunit. Three cases were setupto findthe
bending,
axial, andtorsionalstiffness ofthe HSR. Batchfilescanbe found inAppendix B thatcanbeusedto
findthestiffness ofaHSR. Figures
2.6,
2.7and2.8showtheBending
Stiffness,
TorsionalStiffnessandAxial Stiffnessas
functions
ofRmm,
respectively.1600
0 0.25 0.5 0.75 1 1.25 1.5 1.75 2 2.25 25 2.75 3
Mnimum radius(in)
[image:36.540.84.463.275.558.2]3000
1 1.25 1.5 1.75 2
Minimumradius(in)
Figure2.7:Minimum Radiusvs.TorsionalStiffness.
35000
30000
0.25 0.5 0.75 1.25 1.5 1.75
[image:37.540.51.490.61.316.2]Minimum Radius(in)
[image:37.540.53.481.77.634.2]Thetrendsofthestiffness plots(Figures
2.6, 2.7,
and2.8)
are similarto theircorrespondingnatural
frequency
trends (Figure 2.4). Boththebending
and axialstiffness'
initially
increasewith
decreasing
Rmin,
followedby
adecreaseinthefrequencies. Similarto the torsionalCHAPTER
3: TIMOSHENKO BEAM
THEORY
3.1
MATHEMATICAL MODEL
The HSRwasfurtherstudied
by
means ofbeamtheory. Inordertoconsiderbothshear andbending,
theTimoshenko beamtheory
was utilized. Thisisincontrastto the Euler-Bernoullibeam
theory
thatneglectsshearstrain,and assumesthecross-section remains plane andperpendicularto thelongitudinalaxis
during bending
[20].According
toTimoshenko'stheory
thecross-sectionremains planebut doesnotremain normaltotheaxis. Theshearangle, y,isthedifference betweenthe angleto thenormalofthe cross-section, (|),andthe
slope ofthe centerline, dw/dx (Figure 3.1).
Figure 3.1:TimoshenkoBeamDifferentialElement
Two equations ofmotion, onefortransversetranslation, w, andoneforrotation, <f>, were
writtenfromthe Timoshenkobeamdifferentialelement (Figure 3.1). Equations 3.1 and3.2
aretheequationsofmotionintermsofthe shear,
V,
andmoment,M.V'
= -pAw.
C3-1)
Themomentandtheshear werefound fromthe elastic equation ofthebeamand are given
by
Equations 3.3 and3.4.
M=EI^-,
dx
And
(3.3)
(
dw\
V =
kGAy
=kGA\0-I
dx
(3.4)
Theconstantk istheTimoshenkoshearcoefficient, G istheshearmodulus,E is Young's
Modulus,
A isthe area, andI isthemoment ofinertia. Theshear coefficientvariesdepending
ontheshape ofthecross-section. Thisconstant isusedto accountfortheassumption of constantshearoverthecross-section [20].
Depending
onthesource,itsvaluecanvary. Forthis thesiskwas setto .5and.9. Thisgives arangeofresultsforthenatural
frequencies.
Together,
withtheappropriateboundary
conditions,Equations 3.5 and3.6,
representthemathematicalmodel oftheTimoshenkoBeam.
kGA
2...\
dip
d
wdx
dx7=-pAw
(3.5)
EI
a*2 kGA
</>
dw
dx
=pl<j>
(3.6)
Equations 3.5 and3.6are obtainedfrom substituting Equations 3.3 and3.4 intoEquations3.1
and
3.2,
respectively. The Equations willbesolvedforthenaturalfrequencies usingfinite3.2
FINITE ELEMENT FORMULATION
The finiteelementformulationwasdone in foursteps:
(1)
MeshGeneration andFunction Approximation: Thetranslation,w,andthe rotation,^,wereapproximatedby:
0
=Y/D;.
and w=YiJWj.
(3.7)
Where
Wj
and<E>j
arethenodaltransversedisplacementand rotationcomponents,respectivelyand
Wj
istheshapefunction. The Hermitecubicinterpolationfunctions,
Equation3.8,
wereadoptedforthis analysis.
,P1(x)
=H-2'*V
Vy
x
yhj
W2{x)
=x-2x2
+ h
x3
/z2'
y3{x)
=3 (-Khj2
-2
-T
Ah)
r
.3 -A_
h
"
(3.8)
(2)
The ElementEquation: Theelement equationcanbewrittenas[M]etA+[K]eUe=0
(3.9)
Where[M]eand [K]e
aretheelement massandstiffness matrices, respectively,and Ifis the
The shapefunctionswerefirstsubstitutedintotheequations of motiontoobtainthe
residuals,R:
Rj^V'
+pA^VjWj,
(3.10)
And
Rj*
=\M'-v]-/*jyj*j-(3.11)
Where
V =
kGAfEvpj
-^jWj),(3.12)
And
M^EI^X^j-
(3.13)
Next,
theweightedresiduals wereformedby
multiplyingtheresidualsby
theweightfunctions,
Yj. Theweighted residualswereintegratedovertheelement and set equaltozero.x2 x2
J
Wy'dx+|
%/aAE
VjWdx-0 (3.
14)
xl x\
x2 x2
\Wi[M'-v}ix-$%pIZlyj<!>dx
=0(3.15)
xl xl
Integrating
Equations 3.14and3.15by
parts andexpandingyields:{V,.
pt$y,wdx-]x zlkGA^yp;-y;w>=-%v\*,
0.16)
xl xl
Equations
3.16and3.17canberepresented as:MA+(K^\jWj+(K4.^j=%V\Xx2i,
And
Jv*j+(Kj9Wj+{K\*j=VtM\".
Where:
xl
{Kww)ij=kG)%AV'jdx,
xl
xl
j(,=p\vlrjdx
xl
xl
(3.18)
(3.19)
(3.20)
xl
Inmatrix
form,
Equations 3.18 and3.19,
are givenby
3.21. Noticethat,there are no externalforces,
moments,ormasses appliedto theshellinthis analysis;therefore,theforcevectorissettoall zeros.
[m]
[o]ljw
to]
urn1
[Kwp]
[Kpp]
w[_
0}
InEquation
3.21,
Wisthenodaltransversedisplacementvector{W=[Wj, Wj
',
W2,
W2']1)
andO isthenodal angular rotation vector(O=
[O], O/,
<2,O2']1),
where a prime denotesthefirst derivativewith respecttox.
NotethatuponperformingtheintegrationinEquation
3.21,
AandIare consideredfunctionsoftheaxial global coordinate X:
A{X)
=x(r0{X)2-ri{X)2)
andI{X)
=^(r0{X)4-r,{X)4}
(3.22)
Whereglobal coordinateX is afunctionoflocal elementcoordinate, x:
X=X0+x,
(3.23)
andXoistheglobalcoordinate oftheelement coordinate xl (atnode 1).
(3)
Assembly
oftheGlobal Equation:Assembly
ofthelocalelement equationsintotheglobalequationwas done
by
usingthestandardfiniteelementassemblymethod[32],
rendering:
[MY[
+[Kll
=0(3.24)
Where
[M]
and[K]
arethe assembled globalmass and stiffness matrices, respectively,and Uistheglobal nodal displacementvector. Programs werewritteninMatlabtoassemblethe
global equationforthefixed-freeandfixed-fixed
boundary
conditions (Appendix C).(4)
Solving
fortheEigenvalues: A Matlabprogramwaswrittentoobtaintheeigenvalues and3.3
RESULTS
Figures 3.2and3.3 aretheresults forafixed-freeandfixed-fixed
HSR,
respectively. Theresultswereobtained
by
applyingfiniteelements totheTimoshenkomathematicalmodelwiththeappropriate
boundary
conditions.Forthefixedends:
w=
^
=<Z>=0,
(3.25)
dxAnd forthefreeend:
kAG
\
dw
-0
ox
=7-^=0.
(3.26)
dx
In Appendix CtheMatlab M-filesusedtofindthenaturalfrequencies for varying
Rmin
canFigure3.2 showsthe
bending
naturalfrequencies,
forthefixed-freeHSR,
versusRmi. Plotsare givenfortheshear
factor,
k,
equalto .5 and.9. Theresults show adecreasing
naturalfrequency
withdecreasing
R^n- As expectedthenaturalfrequency
increaseswith anincreaseofk. Notethat thecurvesforthe
different
shear coefficients seemto convergewithdecreasing
Rmin.4000
Rmin(in)
[image:46.540.54.459.222.491.2]Figure 3.3 showsthe
bending
naturalfrequencies,
forthefixed-fixedHSR,
versustheminimum radius.
Again,
plots are givenfortheshearfactor,
k,
equalto .5and.9. Theresults showthat as
Rmin decreases
thenaturalfrequency
increases.Again,
thehighershearcoefficient resultsinhighernatural
frequencies.
Noticethat,
contrastto thefixed-freeresults(Figure
3.2)
the two curves(k=.5andk
=
.9)divergeas
R^n
decreases.16000
14000
2.25 2.5 2.75 0.25 0.5 0.75 1 1.25 1.5 1.75 2
Rmin(in)
[image:47.540.65.491.227.500.2]Chapter
4:
SHELL THEORY
4.1
MATHEMATICAL
MODEL
4.1.1 KIRCHOFF-LOVE THEORY OF SHELLS
During
thesecondhalfofthe 19thCentury
Loveadded assumptionstoKirchoff'sassumptions forthe
theory
of plates sothatitcouldbeextendedtothetheory
ofshells. Thisis sometimes calledtheKirchoff-Love
Theory
ofShellsorjust Love'sTheory
ofShells.Later Reissneraddedtheinfluenceoftransverse shear strainstothe
theory
of shellstoprovidemore accurate solutions.
Many
othershavecontributedto themechanicsof shells ofrevolution
including
butnotlimitedto:Timoshenko,
Girkann, Novozhilov, Vlasov, Lur'e,
andKrauss [10].
Thebasic approachofshell
theory
istoreplace3-dimensional analysisby
theanalysis ofhypothetical 2-dimensions. The kinematics andthekineticsarenormallyreferredto the
middle surface oftheshell. Thispremiseformsthefoundationofthelinearclassical shell
theory
[5].Fourmain assumptionswere made
by
Love,
andhereferredto themashis "firstapproximation"
shell theory.
(1)
Theshellthicknessissmall compared withthesmallest radius of curvature ofthemiddlesurface oftheshell.
(3)
Normal stresses,transverse tothemiddlesurface,are small when compared withotherstresses, and canbeneglected.
(4)
Normalstothemiddle surface oftheshell will remain normal to themiddlesurfaceinalldeformedconfigurations ofthe shell, andwill notbesubjectto
deformation.
Thefirstassumptionisthebasisforallthinshell
theory
[14]. Thethicknessoftheshellshouldbeseveraltimeslessthen theradiiofthe shell as well as otherdimensions
describing
theshell.
According
toNovozhilov[10],
therelationship h/R< 1/20shouldbesatisfiedinordertoachieve errors of5%or
less,
where'h'
is theshellthickness and 'R'
is thesmallest
radius oftheshell. The fourthassumptionis Kirchhoff's hypothesis.
According
to thisassumptionthestrainsinthedirectionnormaltothe shell arezero. This greatly simplifies
thedevelopmentofthe
theory
[10].4.1.2
MATHEMATICAL MODEL OF A SHELL
OF REVOLUTION
Themathematicalmodel of ashell ofrevolutionis developed basedontheclassical
mechanics approach. Theequilibrium equationsaredevelopedasfunctionsofforcesand
displacements.
Substituting
theconstitutive equations (stress-strainrelationships) andthestraindisplacementrelationships
(Kinematics)
into theforceequations, themathematical4.1.2.A
KINEMATICS
Therelationships ofthedisplacementsto the strains, eamdco, thechanges incurvature, %0
andthetwist,x, can bewritten as [10]:
1
du
1^o^V^-^'
z
=1
(dv
" wdtp
R,
J1 dv 1
du
uOJ=
-+ cos<p,
R0
d&
R2
dtp
R0
Zi=~
1
R
'dX,
o V
d&
+
X2
cos<p ,
z2=-1
dX2
R2
dtp
'
T=
Ro V
dx2
d&
-X1
coscp1
du
RYR2
dtp
wheretherotations,
Xa
,aregiven as:1
dw
uX,
= +, Rod*
R!
X,
_\_R,
dwdtp
\ +v(4.1)
(4.2)
Whereu isthecircumferential
displacement,
vis thedisplacementtangenttothemeridian ,wisthe transversedisplacementnormaltothe surface, andthe radii,
R0, Ri,
andR2
(Figure4.1)
arethe distancenormal fromthecenter axistothe meridian, theradiusof circumferential
~~
"
A^SSfisr^^v
Figure4.1:CoordinatesofShell [10].
[image:51.540.133.419.56.218.2]4.1.2.B
CONSTITUTIVE RELATIONSHIPS
Figure 4.2shows adifferential elementforashell, withthestress components actingacross
the thicknessofthe shell.
Notice,
accordingtoLove's assumptionsthestresses normal to themiddle surface are neglected.
[image:51.540.118.425.459.612.2]
Hooke's
Lawgives thestress-strain relationships. In threedimensions Hooke's Law canbewritten as:
fi=-k
-^2+o-3)lE
2=
fa-vfa+vjl
3
=-[^3-^1+^)1(4.5)
0712
G
a -g21
21 ,-,
Ca3 ^
whereEis Young's
Modulus,
G istheShearModulus,
and visPoisson'sratio.Considering
Love'sthirdandfourth assumptions^ =eu
=f23
=cr13 =cr23 =
<73 =0,
Hooke's lawreducesto:
E
(4.6)
<-2E 2
e3--=
0,
u
"l2
G
'
2\
21
G'
a3
=0.Equation4.6canbepresentedina morecondensedform as:
(ra=
Where:
V =3
-a, with a =\ and a=2.
(4.8)
4.1.2.C FORCE AND MOMENT
EXPANSION
[image:53.540.127.436.231.384.2] [image:53.540.55.179.512.698.2]Theunitforces and momentsactingonthefacesofthedifferentialelementare shownin
Figure 4.3.
Figure 4.3: UnitForces,Moments,andTorquesActingonthe DifferentialElement
Theforces
N, Nav,
andQa
arethenormal, shearandtransverseforcesrespectively; whilemomentsandtorques are
Ma,
andMav-They
aredefinedper unitlengthand arefoundby
integrating
thestress overthe thicknessoftheshell.A/2
Na=
\(Ta(l-zKv)dz,
-h/2
A/2
Wov=
j
^ov(l-zKv)dz,
-A/2
Qa=
\crJ\-zKv)dz,
(4-9)
-A/2 A/2
Ma=
\(ya{l-zKv)zdz,
-A/2 A/2
M^=
\cry\-zKv)zdz.
Where
ATV
is thecurvaturesdefinedasKv
=1/RV
Considering
Love'sthirdassumption(o"b
=a23=
0),
Equation 4.9setsQa
=0.However,
Qa
isnot assumedtobezeroand willbesolvedfor later usingtheequilibrium equations.
Carrying
outtheintegrationofEquation 4.9andneglecting higherorderterms,thefinalunitforce,
moments, andtorquesexpressedintermsof strain components are:Na=C{a+Vvv),
Nl2
=N21
=CnOJ,
Ma=D{xa+vvv),
Ml2
=M21
=D12T.Where:
D=
Eh3
C=
Eh
l-v2
'
And
A2=-Gh
12'
(4.10)
Cl2=G12h,
(4.11)
12
2(1+
where
Gn
istheshear modulus.4.1.2.D
EQUILIBRIUM
EQUATIONS
Fromthedynamicequilibrium ofthe
differential
element(Figure4.3)
the equilibriumequationscan bedefinedas
[10,
31]:_
dNx
d(R0N2i)
2
"a*
+dV
+ 2"n cos*"
/?2Gi
sin?+RR^
=a
_
diV12
d{R0N2)
2^f+
d^
"
RlNl
CS*"*fi*
+*0^
='
_
aa
a(/?0<22)
Rl
m
+
d^
+
*2Nl
sm*+* ^2
+****&
='
dAf,
3(i?0M21)
2"5^+dp
+^M2Cos^-J?0J?2gl+JR0/?2/4=o,
3M12
a(/?0M2)
2~a#+aV
RiMicos<p-RoR2Q2+R0R2f5
=o,*2
*,
Thevalues of
f,
in Equation4.13,
are givenby
Equation 4.14 [10].d'u
.,
du
d2w
.,
a>v
/i
=Pi-ph^r-Alh -kiu>fi
=P2
-Ph^T-^h-2v>
(4.13)
f3
=P3 -ph-TT-Aih-k3w,
(4.14)
, h3
a2x,
h3dx,
h=Pn~dtr^n~dT'
, /i3a2z2
&3ax2
/5=_/?T2""a7^+/l2L2""ar-Where
/j
aretheauxiliaryforces,
pirepresentstheloadonthe shell,&,
are coefficientsdescribing
theelasticityof aWinkler-typesubgrade, andA,;
representthedamping
coefficientignored
kt,
andhadno external loads appliedto the shell; therefore,thevalues off
simplifyto:
d2u
fi
=-fihf2
=~phdt2'
v
a2-dt2'
r 7
d2
,a ,nf3=~PhWT>
(4-15)
a?
/i3
a2x,
/4=/o
fs=-P
12 a?2'
/i3
a2z,
12 a?2
Inthis
formfj,f2,
and/3arethelinear inertia forcesoftheshellin the u,vandwdirections,
respectively, andthevalues of
f\
and/5representtherotary inertiaoftheshell.Thesixth equilibriumequationmaynotexactly besatisfiedfora
doubly
curvedshell. Toavoidthis
inconsistency
NovozhilovusedanenergymethodtoexpressN]2
andN2i
as [10]:Nl2
=Cl2OJ-D12K2T,
and(4.16)
N2l=Cl2a)-DllKiT.
A derivationoftheserelationships (Equation
4.16)
is givenby
Leissa [14]. Theserelationships willbeusedinthedevelopmentoftheHSR's equations ofmotion,asdone
by
4.1.3
MATHEMATICAL
MODEL OF THE
HYPERBOLOID
SHELL
OF
REVOLUTION
Thedevelopedapproach oftheequilibrium equation ofChapter 4. 1.2is adaptedand applied
to thedevelopmentofthemathematical model oftheHSR. Three-coupledequation of
motionaredeveloped fromtheequilibrium equations andpresentedinmatrixform.
4.1.3.A
KINEMATICS
Considering
theEquationof ahyperbola,
twodimensionlesscoordinates weredefinedas:=
4,
*=?*-,
(4-18)
d c
which changedtheEquation of ahyperbolato:
//2-f=l.
(4-19)
Using
the threerelationships:The
following
relationshipswere verified[10]:dR^_
dji
d2R0
=A2
d2rj
d'
dz2 c
d2 '
R\
-CC>R2
-12 2
1
a
Arj
a
?]A
=-, sin#? =
,
R
dip
cCdC
drj
d
nd2rj
1d{2
KG
=KlK2
-A2
c2C^
cos<p= ,
A%
cotcp=
^--
= _-*!_. K,=K,K,-4^r,(4-21)
It is importantto note,inthecaseofa
HSR,
thatR2
isnegative. Forthisreasonexactanalyticalsolutionsareconsidereddifficulttoobtain [10].
Substituting
Equations 4.20and4.21 into Equations 4.1 and4.2,
thestrain-displacementrelationshipsoftheHSRwereverifiedtobe:
*!=
1
f
du
An + -vd&
c
CTJ
An
3v
Awf = - 1
2 _y i e _/-3
' w
cdt cC
OJ= _1_
en
d\
Ag \
Andu
ud$
c
+
Zi
=
Xi=-^4x
d&
C
cCdf
T=
cn
An
dX2
i
fax2
At
cn
d&
X,
An
du
AC2"^'
(4.22)
wherethe rotations,
Xa,
are:*i
=*2
=cn
An
dw
n+u
dw
A
d
riC4.1.3.B
EQULILIBRIUM
EQUATIONS
Considering
Equations4.10, 4.16,
and4.21 theunitforces,
moments, andtorquesbecome(They
canbe foundintheirexpandedform in Appendix D):Na=C{a+Vv),
N12
C(l
sD{\-v)A2
=-(l-V>+ V >
T,
2 cQ
N2i=^{l-v)co-^Ar,
(4.24)
2 cQ
Ma=D(za+vzv),
Af12=Af21=D(l-v)r.
Substituting
Equations 4.20 and4.21 into Equation4.13 thesixequilibrium equations fortheHSRwere verifiedtobe [10]:
d&
c
a<r
<rt
^3-^iV
+^-Q
+cnf =0d&
c
^
c
nc
2 2d&
,And{nQ2)
n
A2n
(4.25)
_ci_:2v^v^2/
j_N
-'-UJ-n +Cnf3=0,d&
c
^
c
c3^+^^+KMi2-CJ?Qi+cr}fi=o,
d&
dt,
Q
M91
M,2
N12-N2l+2L r^=0,
R2
Ri
wherethevariables/are given
by
Equations4.15,
andNo, Nn, N2i, Ma, M12
andM2i
areAswaspreviouslymentioned,thetransverseforces
Qa
were not assumedtobeequaltozero.They
werefoundfromthefourthandfifthequations ofEquation 4.25.ft4(^i&)4Ml+/4i
Q2
=cn{d&
d
C
1
\dMl2
And{nM2)
A
(4.26)
17
1
d&
+
C
d
C
~MA+
f5,
where
f4
andf5
arefrom Equation4.15,
andtheunitforces,
moments, andtorquesare givenby
Equation 4.24.The transverseforces (Equation
4.26)
werethen substitutedintothefirstthreeequilibriumequations;renderingthe
following
threecoupled equations of motion:dN,
And{nN2x)
i
1jjM,
And{nM2l)
A
de
H
C
cd&
d
dN12
+And{nN2)
A%
A1dMl2
A3nd(nM2)
A3%
^-Nl + + 4
m1+/;=o,
"x1 'J 2
de
c
^
C
cC^e
cCd#
cC1
d2M1
A
d2{nM2)
A^_
dMl2
And2Ml2
A2nd
(nd{nM2)
cn d&2 cC
d@$
cnde
Cc
d@e
cCd{C
a<f
,3-N2+f3'=0,
A2v(^A.V,T
*2ncC{C
M,
Vb J
+^-Nx
Where:
/i*
=crfi-^f,,
A2n
fi
=77-/5 +c7Zf2,..
a(/4),^
a
a*
+tl^(^)+^
(4.28)
Thethree-coupledequations of motion (Equation
4.27)
canbewritten as:^(Lnu
+Li2v+Li3w+f;)
=0 i=\or
Mu Ml2
Ml3
M2l M22
M23
M3l M32
M33
y+
Lu A
2L13
WL2i
22 ^23 VL31
^32
L33.
W=0.
(4.29)
(4.30)
where
Mtj
isconstructedfrom/
. Theexpanded expressionsforMi}
andLy
arefound inAppendix E.
The mathematical model(Equation
4.30)
canbeexpressedin a condensedformas:|m/
+[l]/=0,
(4.31)
Where U =[u v w]T
4.2
SOLUTION
Theequationsof motion are solvedforthenatural
frequency
usingtheAssumed Mode Shape Method.First,
an overview oftheGalerkinAssumed
ModeShape Method isgiven;followed
by
theapplicationofthemethodto theHSR.4.2.1
INTRODUCTION
TO THE
GALERKIN
ASSUMED MODE
SHAPE METHOD
The Galerkin Assumed Mode Shape Method isusedtoapproximate solutions ofdifferential
equations.
Specifically,
it is a method of weightedresiduals,wheretheweightfunctionsare
equaltothe assumed mode shapefunctions.
Considering
thefollowing
equation;whereL isadifferentialoperatoractingonthevariableu, and/is aknown function.
L{u)
=f
.(4.32)
Thevariable uis approximated
by
theexpression:ui=iyPr
(4-33)
where
*Fj
is an approximate solutionthatsatisfiestheboundary
conditionsofEquation 4.32.SubstitutionoftheapproximationofWjinto Equation 4.32producesthe residual,R.
L(uj)-f
=R(4.34)
It isrequiredthattheresidualbezero overthedomain. Inordertosatisfythis condition, the
weighted-residualis
formed,
integratedoverthedomainand setequaltozero as shownby
4.2.2
APPLICATION
OF THE
GALERKIN
ASSUMED
MODE SHAPE
METHOD
TO THE
HYPERBOLOID
SHELL
OF
REVOLUTOION
Inordertoapplythe Galerkin Assumed Mode Shape Method
to the
HSR,
themode shapeshadtobeapproximatedforthe
fixed-free
andfixed-fixed
HSR. Theassumed shapes ofacylinder were usedto approximatetheshapes oftheHSR.
According
toLeissa[14]
themode shape
functions,
forthe 'mth' mode shape, of a cylinder canbeapproximatedby:Vum=Xm{z)Sin{ne),
Vvm=X'm{z)Cos{ne),
(436)
VZ=Xm{z)Cos(nr),
where
Xm{z)
isthemode shape ofthe lateralvibration ofabeam,
andthecorrespondingcoordinate ofthe shape
function, Tm,
is givenby
itssuperscript. Itwasknownapproximatingthemode shapes oftheHSR
by
the mode shapefunctionsofacylinder,Equation
4.36,
introducederror.Themode shape of alateral vibrating beam isgivenby:
Xm {z)
=C,
cosj3mz+C2
sin/3mz
+C3
cosh/3mz
+C4
sinj3mz,(4.37)
where
Ci, C2, C3,
andC4
are constantsfoundby
applyingtheappropriateboundary
conditions and
fim
isaparameterproportionalto thenaturalfrequency
anddependsontheboundary
conditions:1
(4.38)
,
(El\
Pm
=JamBoththefixed-freeandfixed-fixed beam'smode shapeswerefound usingtheappropriate
boundary
conditions.Forafixedend:
dX
Xm=0,
and ^=0.(4.39)
oz
Forafreeendthe
bending
moment and shear arebothzero;therefore:r)2Y f)3Y
^-^
=0,
and^rf-
=0.(4-40)
dz
dz
Forboththefixed-free andfixed-fixed beamtheapproximate mode shapeis:
Xm{z)
=sin/3mz-smhj3mz-am{cosj3mz-cosh/3mz).(4.41)
Forafixed-free beam:
_
smfij+sinhfij
(442)
m
cos
0J
+cosh0J'
with
fixl
=1.875 104 forthefirstnaturalfrequency.Forafixed-fixed beam:
_
sinh/?m/-sinlm/
(443)
m
cos
fij
-cosh
fij'
The
displacements
werethen approximated as:u =Y:u =Xm{z)Sin{ne)U
v =x:v =
X'm{z)Cos{ne)V,
w=yw=
Xm
{z)Cos{ne)W,
(4.44)
where
XJz)
isforafixed-freeorfixed-fixedbeam,
andfortheHSR,
uisthecircumferentialdisplacement,
visthedisplacementtangent tothe meridian andwisthe transverse [image:65.540.199.341.235.344.2]displacementnormalto the surface, as shown
by
Figure 4.4.Figure 4.4: Displacementcoordinatesfor the HSR.
The displacementapproximations werethenwrittenintermsofthevariables <fand
d,
by
substituting z=
d
intoXm{z)
andX'ffl(z),
andthenintothe threeequationsofmotion(Equation
4.30);
renderingtheresiduals:l1{w:u,w:v,w:w}+m1{^:u,w:v,^:w}^r1,
L2{w:u,w:v,w:w}+M2{v:u,v;v,vm'w}=R2,
<![Figure 1.1: Three Types of Flexibility [1].](https://thumb-us.123doks.com/thumbv2/123dok_us/123034.11928/11.540.150.374.368.453/figure-three-types-of-flexibility.webp)
![Figure 13: Geislinger Gesilco Cl-design [7].](https://thumb-us.123doks.com/thumbv2/123dok_us/123034.11928/18.540.194.349.341.474/figure-geislinger-gesilco-cl-design.webp)
![Figure 1.5: BI-Design Coupling [7].](https://thumb-us.123doks.com/thumbv2/123dok_us/123034.11928/19.540.221.336.54.205/figure-bi-design-coupling.webp)
![Figure 1.6: An integral composite drive shaft coupling [5].](https://thumb-us.123doks.com/thumbv2/123dok_us/123034.11928/20.540.187.358.579.668/figure-integral-composite-drive-shaft-coupling.webp)