A PRACTICAL OPTIMAL COTROLLER FOR GANTRY CRANE SYSTEMS
MOHD ZULKHAIRI BIN RUSLAN
This report is submitted in partial fulfillment of the requirements for the award of Bachelor Electronic Engineering (Industrial Electronics) With Honours.
Faculty of Electronic and Computer Engineering Universiti Teknikal Malaysia Melaka
UNIVERSTI TEKNIKAL MALAYSIA MELAKA
FAKULTI KEJURUTERAAN ELEKTRONIK DAN KEJURUTERAAN KOMPUTER
BORANG PENGESAHAN STATUS LAPORAN PROJEK SARJANA MUDA II
Tajuk Projek : A PRACTICAL OPTIMAL CONTROLLER FOR GANTRY CRANE SYSTEMS
Sesi
Pengajian : 2008/2009
Saya MOHD ZULKHAIRI BIN RUSLAN mengaku membenarkan Laporan Projek Sarjana Muda ini disimpan di Perpustakaan dengan syarat-syarat kegunaan seperti berikut:
1. Laporan adalah hakmilik Universiti Teknikal Malaysia Melaka.
2. Perpustakaan dibenarkan membuat salinan untuk tujuan pengajian sahaja. 3. Perpustakaan dibenarkan membuat salinan laporan ini sebagai bahan pertukaran
antara institusi pengajian tinggi. 4. Sila tandakan ( √ ) :
SULIT*
(Mengandungi maklumat yang berdarjah keselamatan atau kepentingan Malaysia seperti yang termaktub di dalam AKTA RAHSIA RASMI 1972)
TERHAD* (Mengandungi maklumat terhad yang telah ditentukan oleh organisasi/badan di mana penyelidikan dijalankan)
TIDAK TERHAD
Disahkan oleh:
……….. ………..
(TANDATANGAN PENULIS) (COP DAN TANDATANGAN PENYELIA)
Alamat Tetap:
NO.26 JLN 12/4, TMN CHERAS JAYA 43200 BATU 9 CHERAS
SELANGOR
iii
“I hereby declare that this report is the result of my own work except for quotes as cited in the references”
Signature :………
iv
“I hereby declare that I have read this report and in my opinion this report is sufficient in terms of the scope and quality for the award of Bachelor of Electronic
Engineering (Industrial Electronics) with Honours”
Signature :………..
v
vi
ACKNOWLEDGEMENT
vii
ABSTRACT
viii
ABSTRAK
Teknik kawalan optimal di dalam projek ini digunakan adalah untuk menghapuskan ayunan beban dan mengawal kren gantri supaya dapat meletakkan beban tepat pada tempatnya dengan kalajuan yang tertinggi. Di dalam projek ini, teknik kawalan optimal dapat ditunjukkan melalui persamaan pembezaan terhadap ayunan beban. Sebagai jaminan pedati dapat digerakkan tepat pada tempat yang dikehendaki, sebuah sistem “linear quadratic regulator” (LQR) direka untuk mengawal “gantry crane” pada tahap kawalan optimal dengan menggunankan perisian MATLAB. Oleh yang demikian, beban dapat diletakkan pada tempat yang sesuai dengan ketepatan yang tinggi dan tanpa ayunan pada beban.
ix
TABLE OF CONTENTS
CHAPTER CONTENTS PAGES
PROJECT TITLE i
DECLARATION iii
DEDICATION v
ACKNOWLEDGEMENT vi
ABSTRACT vii
ABSTRAK viii
TABLE OF CONTENTS ix
LIST OF TABLE xii
LIST OF FIGURE xiii
LIST OF APPENDIX xiv
I INTRODUCTION 1
1.1 Project Introduction 1
1.2 Objective 3
1.3 Problem Statement 3
1.4 Scope Project 4
1.5 Methodology Flowchart 5
x
II LITERATURE REVIEW 7
2.1 The Gantry Crane Overview 7
2.2 Optimal Control Theory 10
2.3 The Optimal Linear Regulator 12
III RESEARCH METHODOLOGY 14
3.1 The Gantry Crane Model 14
3.2 System Dynamics 16
3.3 Mathematical Modeling Techniques 18
3.3.1 Newton’s law of motion 18
3.3.2 The energy method 19
3.4 Derivation of the Equation of Motion 21
3.5 Simulation System Block 28
3.6 Interfacing 29
3.7 RTWT Set Up 30
IV RESULT AND DISCUSSION 31
4.1 Input Signal 31
4.2 Cording Command 32
4.3 The Output Position and Sway Angle 35
V CONCLUSION AND SUGGESTION 43
5.1 Conclusion 43
xi
REFERENCE 45
xii
LIST OF TABLE
NO TITLE PAGES
xiii
LIST OF FIGURE
NO TITLE PAGES
1.1 The Gantry Crane 2
1.2 Methodology flowchart 5
2.1 A real-world crane system in the harbor 8
2.2 The Model of Gantry Crane 9
3.1 Model of gantry crane 15
3.2 Flowchart of Gantry Crane interface 16
3.3 The modeling of the Gantry Crane 17
3.4 Closed-loop Block system with LQR feedback controller 28
3.5 Interfacing connection 29
3.6 RTWT block system interfacing 30
4.1 Input signal 32
4.2 Output position for LQR controller 36 4.3 Output sway angle for LQR controller 37
4.4 Output position for PID controller 39
xiv
LIST OF APPENDIX
NO TITLE PAGES
A COMPONENTS OF TROLLEY 47
CHAPTER I
INTRODUCTION
1.1 Project Introduction
The crane is a name of machine that used to lift the payload at one location to desire locations. In mechanical sector, their have many type of crane. The type of crane that has used in this project is a gantry crane. In many case, many engineer were design a system of gantry crane to solve the problem that has occur before. The problem that has to solve is vibration and swing payload when operating. The gantry crane can’t operate properly during lift a payload and maybe an accident will be happen. So, the system that has design of engineer is an initiative to solve that’s problem.
2
[image:16.595.151.509.132.374.2]condition, the linear quadratic regulator is used to constant the speed during the gantry crane is decelerating.
Figure 1.1: The Gantry Crane
3
1.2 Objective
The objective of this project is to apply the technique of the optimal controller into the gantry crane and to move the payload to the required positions as fast as possible without swaying payload.
1.3 Problem Statement
In many mechanical and electrical parts that used a motor to control performance of machine has a problem to stop at desire level with high efficiency and safety. An optimal control strategy is important to control the acceleration and deceleration motor speed. In gantry crane system, the high speed in moving a payload will be provide a large swaying angle along travel to desire location. In high speed moving of crane, the speed of payload also increase base on speed of crane. So, swaying angle of payload is potential to become large from initial condition. This situation will cause an accident or crush to the payload.
4
1.4 Scope Project
The scope of this project includes:
i). Do research about gantry crane characteristics
ii). Research and study of system dynamics in gantry crane. iii). Research and study about the optimal controller technique. iv). Study and design to create block input system.
5
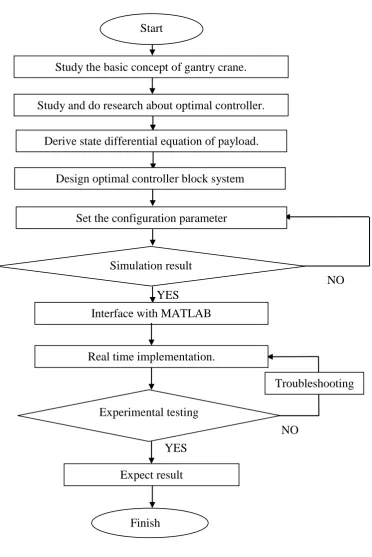
[image:19.595.153.526.89.647.2]1.5 Methodology Flowchart
Figure 1.2: Methodology flowchart Study the basic concept of gantry crane.
Study and do research about optimal controller.
Simulation result Start
Derive state differential equation of payload.
Set the configuration parameter
Expect result Interface with MATLAB
Real time implementation.
Troubleshooting Experimental testing
Finish
NO YES
YES
6
1.6 Project Outline
CHAPTER II
LITERATURE REVIEW
2.1 The Gantry Crane Overview
8
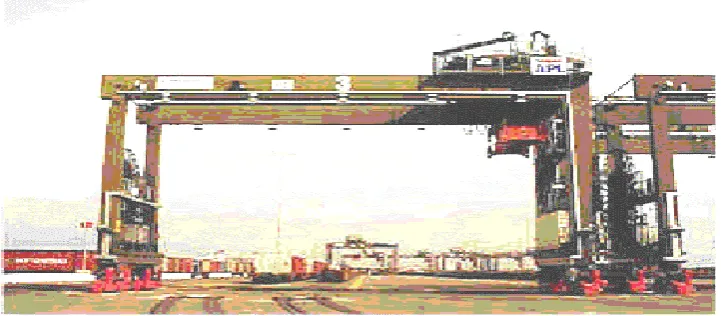
Figure 2.1: A real-world crane system in the harbor
Gantry cranes are widely used for transporting heavy loads and hazardous materials in building constructions. The crane should move the load as fast as possible without having any excessive payload motion at the final position. However, most of the common gantry cranes result in a swing motion when payload is suddenly stopped after a fast motion [20]. The swing motion can be reduced however; it is often time consuming processes which eventually affect the productivity (operational efficiency) in building constructions. Moreover, the gantry crane needs a skilful operator to manually control it using an experience to immediately stop the swing at the right position. Furthermore to unload, the operator has to wait until the load stops swinging. The failure in controlling crane might also cause accident and harm people.
9
Figure 2.2: The Model of Gantry Crane.
Figure 2.2 shows an example of a gantry crane model that is use to test a crane technique before it is implemented into real gantry crane machine. To obtain the best result Figure 2.2 is constructed with fully metal similar with a real gantry crane. The base of this gantry crane model must be firm to avoid vibration when moving the payload.
10
2.2 Optimal control theory
Optimal control system is a one of technique that used in many type of control systems. As a theoretical, the linear quadratic control problem has its origins in the celebrated work of N. Wiener on mean-square filtering for weapon fire control during World War II (1940-45) [2, 3]. Wiener solved the problem of designing filters that minimize a mean-square-error criterion (performance measure) of the form
) ( 2 t e E
J (2.1)
where, e(t) is the error, and E{x} represents the expected value of the random variable x. For a deterministic case, the above error criterion is generalized as an integral quadratic term as
0 e'(t)Qe(t)dt
J (2.2)