P a r a m e te r E s t im a t io n o f M o d e ls
W it h M a n y D a m p e d C o m p le x E x p o n e n tia ls
Margaret Helen Kahn
April 1991
A thesis submitted to the
Australian National University
for the degree of Doctor of Philosophy
Computer Sciences Laboratory,
S ta te m e n t
The results in C hapter 2 of this thesis on th e dependence of the ORA algorithm on
th e form of the constraint were obtained in collaboration w ith D r.M .R.O sborne of
th e School of M athem atical Sciences, A ustralian N ational University, and D r.G .K .Sm yth
of the M athem atics D epartm ent, U niversity of Queensland.
Elsewhere, unless otherw ise stated , th e work described is my own.
A c k n o w le d g e m e n ts
I would like to express my g ratitu d e to my supervisor, Dr. Iain Macleod, of the
C om puter Sciences Laboratory, for his continual support and interest in my research.
I am indebted to him for his painstaking reading of the drafts of this thesis. I would
also like to th an k Prof. R ichard B rent for his constructive com m ents on the content
of my work. My thanks also go to Dr. Larry Brown of the Research School of
C hem istry for suggesting the problem and providing d a ta for analysis. As well I am
grateful to Dr. Mike Osborne for stim ulating discussions on fitting exponentials.
I would also like to acknowledge th e support of th e staff of the Supercom puter
Facility at th e ANU. W ith o u t th e provision of access to th e Fujitsu VP100 and their
cheerful advice, this thesis would have been very different.
My appreciation goes to all th e staff and my fellow students of the C om puter Sciences
L aboratory for th eir help at answering m any questions.
Finally I would like to th an k my husband, T im , and our children for th eir patience
A b s tr a c t
P aram eter estim ation techniques for d a ta m odelled as a sum of dam ped complex
exponentials are proving to be a successful alternative to Fourier transform m ethods
for spectral estim ation. This thesis investigates such techniques in the context of
NM R spectroscopy where th e models are of th e form
y(n) = 2 > /tei*ke(- i,‘ +,2’r/‘ )A‘n + e(n)
k=1
for n = 1 , . . . , N. In practice these models have m any term s and are fitted to large d a ta sets. T he resulting com putations are readily vectorized and suit a supercom
p u ter environm ent. W ith such com putational power, num erical problem s arising
when applying p aram eter estim ation techniques to large models can be addressed
along w ith questions about theoretical statistical properties of these alternative
m ethods.
The first technique discussed is P ro n y ’s m ethod which uses th e difference equation
satisfied by the noise free d a ta to provide an alternative reparam eterisation. This can
be shown to be statistically inconsistent and so does not lead to reliable param eter
estim ates. A statistically consistent version of P ro n y ’s m ethod, referred to as the
GRA algorithm , perform s well for small models but is shown to succum b to problems
of num erical ill-conditioning w ith increased m odel complexity.
A nother extension of P ro n y ’s m ethod, th e ORA algorithm , which was previously
th e choice of the constraint on the coefficients of the difference equation. Only
certain forms of this constraint lead to consistent param eter estim ates. Even then
th e algorithm encounters the same num erical problem s as the ORA algorithm when
applied to larger models.
An extension of P ro n y ’s m ethod being used extensively in practice is the Kum aresan-
Tufts LP m ethod. A lthough this produces good param eter estim ates at high signal
to noise its perform ance deteriorates below a threshold signal to noise level. The
dependence of this threshold behaviour on th e num erical rank of the coefficient
m atrix is explored in some depth.
As these three verions of P ro n y ’s m ethod are inadequate for NM R analysis we focus
on th e developm ent of a state space realization of th e system producing th e noise-free
signal. This leads to th e Hankel Singular Value D ecom position (HSVD) algorithm
which is shown to be equivalent theoretically to P ro n y ’s m ethod b u t displays superior
estim ation accuracy when applied to real and sim ulated data. This difference in
sensitivity to p ertu rb atio n s in th e d a ta is due to the n atu re of th e com putations in
the two approaches. The HSVD algorithm uses a singular value decom position which
is less sensitive to p ertu rb atio n s th an th e corresponding Propy step, and replaces
th e calculation of zeros of a large order polynom ial by th e solution of the eigenvalues
of a norm al m atrix.
Two-dimensional NM R experim ents provide a spectral estim ation problem th a t can
be solved by a sequence of applications of th e one-dim ensional HSVD algorithm . In
th e NM R context, no o ther technique available is reliable enough to estim ate the
param eters from th e resulting d a ta sets which are m odelled as th e sum of many
C o n te n ts
S ta te m e n t i
A c k n o w le d g e m e n ts ii
A b s tr a c t iii
1 In tr o d u c tio n 1
1.1 M otivation...
1
1.2 Fourier Transform ...
2
1.3 Non-Linear Least S q u a r e s ...
6
1.4 Autoregression and Linear P re d ic tio n ...
9
1.5 Thesis O utline... 11
2 P r o n y ’s M e th o d 14
2.1 Intro d u ctio n ... 14
2.3 Separation of Variables in the Exponential M o d e l ... 18
2.4 Gradient Condition Reweighting Algorithm ... 24
2.5 Objective Function Reweighting A lgorithm ... 29
3 E x te n s io n s and I m p le m e n t a tio n s o f P r o n y ’s M e th o d 43
3.1 In tro d u ctio n ... 43
3.2 Kumaresan-Tufts Prony M eth o d ... 48
3.3 Failure of the Truncated SVD... 51
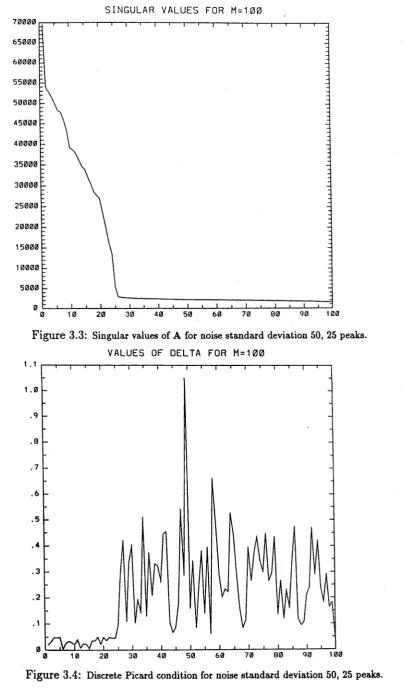
3.4 Perturbation Analysis ... 56
3.5 Experimental R e s u lts ...63
4 A S ta te S p a ce M e t h o d for E s tim a tin g F r e q u e n c ie s an d D a m p in g s 78
4.1 In tro d u ctio n ... 78
4.2 State Space System Theory ... 79
4.3 Development of the HSVD A lgorithm ...81
4.4 Relationship to Prony’s M e th o d ... 87
4.5 Algorithm Perform ance... 89
4.6 Numerical Sensitivity of the HSVD A lg o rith m ... 107
4.7 Statistical Analysis of Frequency E stim ates... 116
5.1
Introduction
123
5.2 Two-Dimensional Spectral Estim ation...125
5.3 Estimation Procedure and E x a m p le s ... 129
6 D is c u ss io n 140
6.1
Directions for Further R e s e a rc h ...140
6.2 C o n clu sio n s...142
C h a p te r 1
I n tr o d u c tio n
1.1
M o tiv a tio n
This study on p aram eter estim ation of models of m any dam ped exponentials is m oti
vated by th e problem of spectral estim ation in Nuclear M agnetic Resonance (NMR)
spectroscopy. The d a ta collected is th e m agnetisation of the precessing molecules in
solution as they settle to equilibrium after being p ertu rb ed by a m agnetic pulse, and
is referred to as th e Free Induction Decay (FID ). T he FID can be m odelled as a sum
of dam ped complex exponentials. For com plicated molecules th ere m ay be many
hundreds of term s in th e model. Thus the aim of this thesis is to investigate param
eter estim ation techniques for such models. T he features of the different algorithm s
to be discussed cover theoretical statistical foundations, com putational aspects of
th e im plem entations and possible problem s when applying these algorithm s to real
data. A m ongst other things, this will require th a t th e algorithm does not develop
num erical ill-conditioning as th e num ber of term s in th e m odel and also the num ber
of d a ta points become large.
A restriction on previous com parative studies is th e large am ount of com puter tim e
required for these analyses on conventional machines. To avoid this, it has been com
mon practice to use estim ation m ethods which assum e statistical properties such as
statio n arity to estim ate param eters in the dam ped exponential model for which the
d a ta is not stationary. This is frequently justified on the grounds th a t the resulting
com putation tim e is minimised. However w ith the advent of supercom puters, it is
possible to concentrate on im plem enting theoretically sound m ethods rath er than
m ethods th a t m inim ise com putational tim e. Ideally, a param eter estim ation tech
nique which gives th e best possible estim ates for noisy d a ta will satisfy statistical
requirem ents such as consistency and m inim um variance. In fact, as th e NM R d ata
is expensive and tim e-consum ing to collect, long com putation tim es for the analy
ses are acceptable, provided the techniques used ex tract the m axim um am ount of
inform ation from th e experim ental data.
1.2
F o u rier T ra n sfo rm
T he d a ta in th e FID is collected as complex d a ta as th e m agnetisation is m easured
in two perpendicular directions. T he FID is m odelled as follows, K
y(n) =
^2
rjte,fl!>ke^_bfc+l27r^fc^Atn -f e(n) (1.1)Jfc=i
for n = 1 where e(n) is complex norm al noise. The param eters and f a
represent th e am plitude and phase of th e K exponentials while 6jt and fk are the dam ping and frequency param eters and At is th e tim e interval between observations.
T he chem ist prefers to ex tract inform ation from th e Fourier transform spectrum of
th e noise-free tim e dom ain data. T h a t is,
V frfcA* + i2ir(fk - f ) A t
h \ rke
(6* A0 2 + (2*(/jfc - / ) At)2 ‘
This represents a sum of K complex Lorentzian lineshapes. As / —> for each k
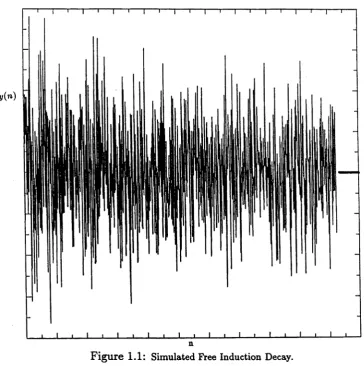
n
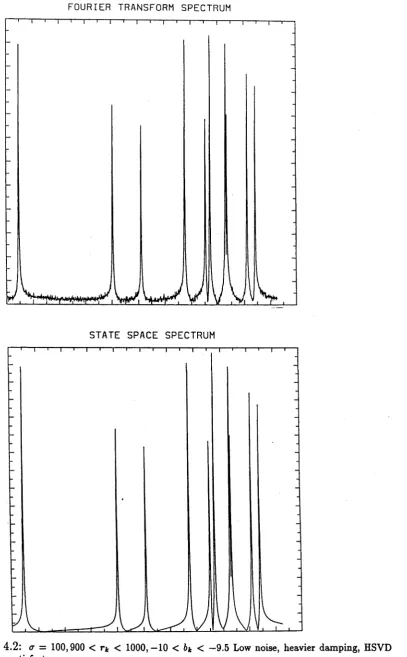
Figure
1.1: Simulated Free Induction Decay.damping parameters 6*. The larger
bk the wider the peak. As 6* —►0 we approach
the line spectrum of a non-damped sum of sinusoids.
Thus the parameters of the model (1.1) can be interpreted as follows, the fk
are the
frequencies at which the spectrum has peaks, the 6* are related to the width of the
peaks and the complex amplitudes are equal to the amplitudes and phases of the
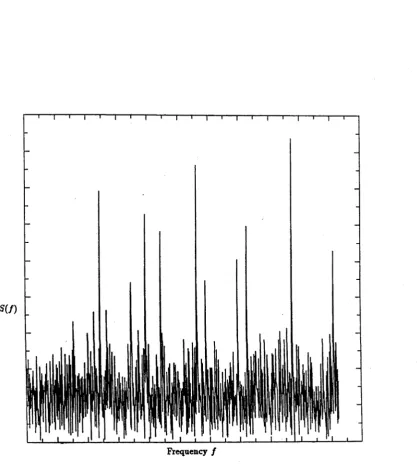
spectral peaks. Figure
(1.1)shows a simulated FID and Figure
(1 .2 )is its Fourier
transform spectrum.
There are, however, some problems with using the discrete Fourier transform on
NMR data sets. A major problem arises if the data set is truncated so that it
does not completely cover the decay of the damping parameters. This leads to
S( f )
Frequency /
F ig u r e 1.2: Fourier Transform Spectrum
[image:12.557.99.517.91.566.2]leakage of peaks into the sidelobes of the transform . Possible filtering m ethods to
reduce this effect are discussed in Stephenson (1988). The m ost common m ethod
in practice is to m ultiply th e decaying FID by a bell-shaped window function. This
unfortunately leads to a loss of resolution in th e spectrum because it broadens the
peaks. Intuitively this is to be expected because there will be a loss of inform ation
from th e initial p art of the FID and this is the portion of the decaying signal with
th e highest signal to noise ratio. The artifacts introduced into th e spectrum by
th e Fourier transform and th e loss of resolution due to a tte m p ts to elim inate these
artifacts m ean th a t, for a noisy d a ta set w ith close peaks, it m ay be impossible to
separate spectral peaks or to discern signal from noise peaks.
It is because of these disadvantages of using th e Fourier transform spectrum th a t
altern ativ e param eter estim ation techniques are being developed. T he aim of such
techniques is to produce accurate estim ates of all 4K param eters in the model (1.1)
and, if so desired, these estim ates can be used to generate an estim ate of the spec
trum .
Most results of estim ation procedures are presented as a spectral plot in this th e
sis as it leads to direct visual com parison w ith the Fourier transform . There are
several forms of sp ectra from which to choose. T he NM R chem ist prefers to use
phase-sensitive spectra which are obtained from various quadrants of th e real and
im aginary p arts of th e spectrum . T he exam ples in this thesis are all p lotted as abso
lute value spectra. Such sp ectra display th e sam e characteristics as a phase-sensitive
spectrum and bo th are obtained from the sam e set of estim ates of the param eters
in (1.1). Because different NM R experim ents lead to different constructions of the
phase-sensitive spectra, th e absolute value spectrum is chosen for plotting as being
m ore stan d ard .
Thus when a spectrum in this thesis is p lotted from th e estim ates of the 4K param
eters of the tim e dom ain m odel the form ula used is as follows,
K rk
S { f ) = t i (6kA 0 2 + (2x(fk ~ f W ) 2
or equivalently,
K rk
S{n) = £ [ (bkA t y + ( 2 x ( f kA t - n S W / N ) ) 2
where n = 1 , . . . , N and where S W is the spectral w idth. W hen a Fourier transform
spectrum is p lotted it is also the absolute value spectrum of the calculated discrete
Fourier transform .
1.3
N o n -L in e a r L e a st S q u a res
To fit th e m odel (1.1) to th e d a ta y ( l ) , . . . , y ( N ) a non-linear least squares problem
m ust be solved. For norm al noise, th e m axim um likelihood param eter estim ates
rk,<t>k, bk and fk m inim ise the sum of squares
K N
£
71=1y(n) - £ r t e,**e(- ,,‘ +i2' /‘ )A<n k = 1
(1.3)
This is a non-linear optim ization problem and has th e rep u tatio n of being difficult to
solve. Any optim ization procedure used requires initial estim ates of th e param eters
to begin its iterativ e m inim isation. Badly chosen initial estim ates will lead to the
m inim isation converging (if it can) to a local rath er th a n a global m inim um .
A nother difficulty w ith this least squares problem is th a t th e response surface repre
sented by (1.3) as a function of th e 4K param eters displays large flat areas around
th e tru e p aram eter values. This m eans th a t for a large range of param eter values,
there m ay not be a significant reduction in th e sum of squares. It is not easy to find
a m inim um in such a situation.
Varah (1985) considers this problem when fitting sums of real exponentials. He
th e correct m inim um point. Sim ilar results can be shown for specific examples of
th e m odel (1.1).
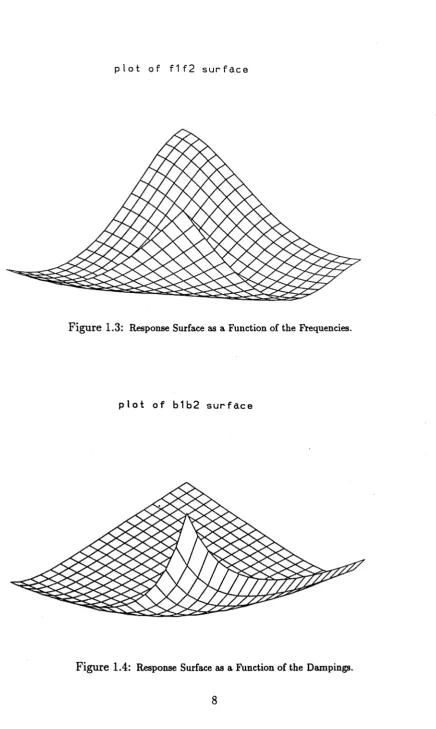
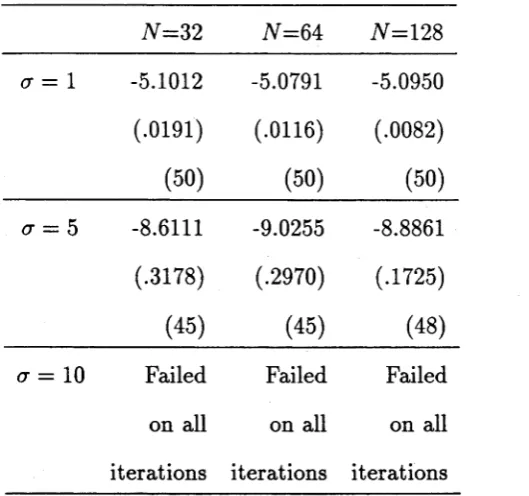
Figures (1.3) and (1.4) show th e response surface at different values of the param eters
in th e m odel
yt = 2e-< cos t + 2.5e_1'5< cos l At.
By expressing the cosine term s as the sum of conjugate complex term s this model
can be w ritten in th e same form as (1.1). As there are more th an two param eters
in this case th e response surface is plotted as a function of two of th e param eters
while th e rem aining param eters are fixed at th eir tru e values. Figure (1.3) gives
a plot of the sum of squares (1.3) for varying values of th e frequencies / i and f 2.
T he tru e values of / i and / 2 are 1.0 and 1.4 and &i,62,ri and r 2 are held at their
tru e values in th e model for th e calculations. T he resulting response surface should
display a clear m inim um at th e tru e values of f i and / 2. However Figure (1.3) has a long valley shape m aking it difficult to exactly find th e m inim um . Figure (1.4)
shows th e response surface as a function of th e dam ping param eters b\ and &2 with th e frequencies and am plitudes held constant. It is even more difficult to find a
m inim um point here as the surface is m ainly flat.
Because of th e difficulty of solving this non-linear optim ization problem , alternative
p aram eter estim ation techniques are used. Most of these m ethods are known to
be sub-optim al in some way; some ignore th e decay in th e d a ta and others will
be shown to tre a t a com plicated error term as norm al noise in order to obtain a
solution. However these techniques m ay provide satisfactory initial estim ates to
sta rt th e non-linear iterative optim ization.
p l o t o f f 1 f 2 s u r f d e e
F ig u re 1.3: Response Surface as a Function of the Frequencies.
p l o t o f b 1 b 2 s u r f a c e
[image:16.557.68.505.54.784.2] [image:16.557.76.469.76.389.2]1 .4
A u to r e g r e s s io n a n d L in ea r P r e d ic tio n
A full review of the application of autoregressive and linear predictive m ethods to
NM R d a ta is given in Stephenson (1988) and this section sum m arises his review.
Much of th e relevant theory is drawn from Kay and M arple (1981) or can be found
in M arple (1987). The m otivation for using linear prediction comes from the com
m only used practice of zero-filling to increase th e resolution of th e Fourier transform
spectrum . For tru n cated NM R d a ta a Fourier transform spectrum of more points
th an the tim e dom ain d a ta can be obtained by extending the d a ta set w ith zero
entries to th e required num ber of points before doing th e transform . This will pro
duce m ore points in th e spectrum and so appear to improve the resolution but it is
not th e correct spectrum . If it is possible to predict th e shape of th e d a ta after the
tru n catio n then predicted d a ta values can be used ra th e r th an zero values. Then,
if the prediction is accurate, th e resulting Fourier transform will genuinely be of
higher resolution.
T he function used to define th e prediction relationship is the linear form
M
y ( n ) = ~ a ( m ) y ( n - m ) + e(n) (1.4)
m = l
for n = 1 , . . . , N and where e(n) is assum ed to be w hite noise. This is called Linear Prediction or LP and defines y(n) as satisfying an autoregressive (AR) model. It will be shown in C hapter 2 th a t, for d a ta m odelled as a sum of exponentials as in
(1.1), th e linear prediction relationship satisfied is actually an autoregressive moving
average (ARM A) m odel because the error term has a m ore com plicated structure
th a n ju st w hite noise.
T here are several m ethods for solving for th e coefficients a ( m) in (1.4). In sum m ary they all involve setting up a m a trix of autocorrelation coefficients which is then used
in a Levinson recursion to solve th e Yule-Walker equations to give the coefficients
a(m).
There are improvements to this method due to Burg (1967) and, as such,
the autoregressive modelling technique has been applied to NMR data, see Ni and
Scheraga (1986). There is, however, a serious problem in applying the AR modelling
to damped exponentials. The major assumption made in setting up the Yule-Walker
equations which define a recursive relationship between the autocorrelation coeffi
cients in terms of the LP coefficients is that the data is stationary. In fact such
an assumption is crucial in defining and calculating the autocorrelation coefficients
with NMR data. This assumption is invalid because the decay in the data means
that it is not stationary. That is, statistical properties of the data such as the mean
are not constant over time. This same assumption of stationarity is required for the
Burg modification. As a result autoregressive methods are not suitable for modelling
damped exponentials. In some NMR experiments the damping is extremely light
and in this situation Ni and Scheraga (1986) and Barone et al. (1987) claim limited
success with AR modelling.
A more justifiable approach to solving for the coefficients of (1.4) is the covariance
method. In this case the LP coefficients
a(m)
are solved directly from an overde
termined system of equations defined by (1.4). In the autoregressive modelling case
it is the normal equations arising from these equations which are used. For the
covariance method the a(m) are found as the least squares solution to the system
of equations
y = Aa,
'
y ( M +
1) N
v
y ( N) jy( M)
— 1)
K y ( N -
1)
y ( N
— 2)
y ( N - M )
indefi-nitely and th e Fourier transform is obtained from the z transform of the infinite d ata
set. Tang and Norris refer to this as th e LPZ spectrum . This m ethod of spectral
estim ation is not pursued any further herein for two reasons. F irstly th e LP m ethod
is purely a d a ta analysis approach and does not have any tru e statistical foundations
which are necessary for a technique to be reliable at higher noise levels. For the LP
m ethod the error e(n) is sim ply a prediction error and cannot be m odelled proba
bilistically. The second problem w ith using th e LPZ m ethod is in the calculation
of th e spectrum . W ithout going into details, suffice it to say th a t th e calculation
involves taking th e Fourier transform of a tru n cated set of num bers. This leads to
th e sam e artifacts in th e spectrum as those seen when taking the Fourier transform
of the original data.
A m ajor disadvantage of these LP m ethods is th a t th e spectral estim ate does not
give estim ates of th e param eters in the model. Such param eter estim ates will prove
to be necessary in applications to NM R spectroscopy.
1 .5
T h e s is O u t lin e
The m ost widely used m ethod for estim ating th e param eters of th e model (1.1) is
P ro n y ’s m ethod. D etails of th e conventional P ro n y ’s m ethod are given in C hapter
2. P aram eter estim ates obtained by this m ethod are shown to be statistically sub-
optim al in th a t they are not statistically consistent. This m eans th a t, for noisy data,
increasing th e num ber of d a ta points does not necessarily im prove th e accuracy of the
p aram eter estim ates. For a statistically consistent estim ation technique increasing
the num ber of d a ta points produces param eter estim ates th a t converge to their tru e
values. In practice P ro n y ’s m ethod m ay produce adequate estim ates when the signal
to noise ratio is high bu t th e reliability of th e estim ates deteriorates rapidly as the
noise level is increased.
C h ap ter 2 also contains discussions of two modifications of P rony’s algorithm . These
are th e GRA algorithm of Osborne and Sm yth (1987) and the ORA algorithm of
Bresler and Macovski (1986). The first of these is statistically consistent while the
la tte r m ay be when a scaling constraint takes particular forms. Although both the
GRA and ORA algorithm s work well on d a ta m odelled by one or two exponentials,
neither of these m ethods proves to be robust enough to apply to NM R type models
w ith m any dam ped complex exponentials. Some reasons for this are given in the
conclusions of C hapter 2.
An extended Prony m ethod is discussed in th e work of K um aresan and Tufts (1982).
This proves to be m ore useful th an the conventional Prony m ethod on noisy d ata
sets. C hapter 3 of this thesis is devoted to a discussion of th e K um aresan-Tufts
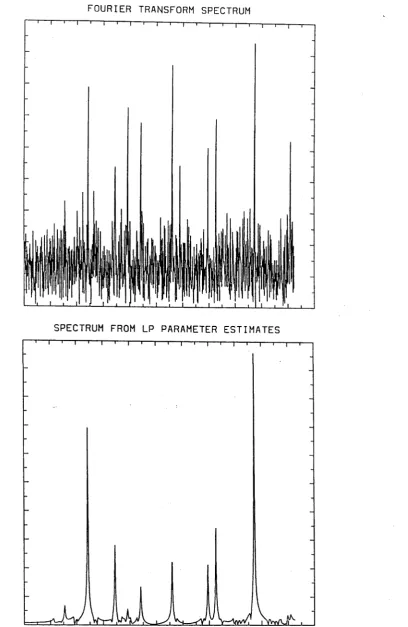
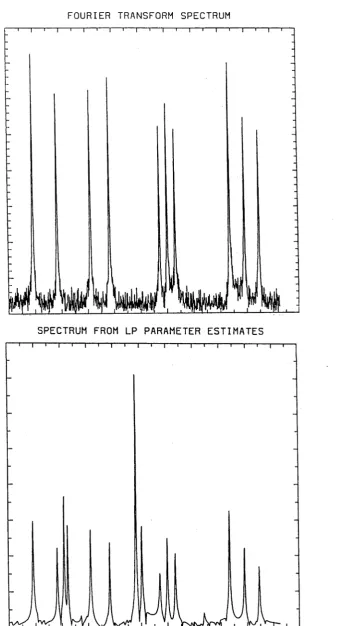
algorithm . Spectral estim ates arising from its application to a variety of sim ulated
d a ta sets are given. This m ethod still does not produce accurate p aram eter estim ates
at m ore th an m inim al noise levels and so is not considered satisfactory for use on
experim ental data. The relationship between th e num erical rank of a coefficient
m atrix required in th e calculations and the success of the algorithm at different
noise levels is also investigated in some detail.
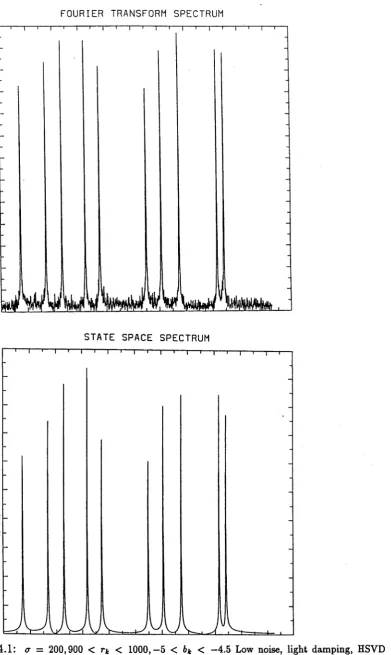
In C hapter 4 th e Hankel Singular Value D ecom position (HSVD) algorithm for pa
ram eter estim ation of sums of complex exponentials is given. This algorithm is
based on a state-space in terp retatio n of the underlying system producing the noise-
free signal. This is shown to be theoretically equivalent to th e conventional Prony’s
m ethod b u t, in practice, it far outperform s any of th e Prony type m ethods. Some
theoretical justification for this is given as well as the spectral estim ates obtained
by applying th e HSVD algorithm to th e sam e sim ulated d a ta sets used in C hapter
3. Results of the analysis of a real NM R d a ta set are then presented to show a
practical application of th e HSVD algorithm . The problem of estim ating the num
the o u tp u t of the HSVD algorithm are discussed. This is an im p o rtan t part of the
application of param eter estim ation techniques to real NM R d a ta where the num ber
of exponentials,
K ,
is usually not known.C urrent experim ental practice in NM R studies is to extend th e one-dimensional
m odel to a two-dim ensional sum of complex dam ped exponentials resulting in a two-
dim ensional spectrum . Various approaches for estim ating such spectra are discussed
in C hapter 5 w ith th e final decision being m ade to use a sequence of applications of
th e HSVD algorithm . This procedure is im plem ented on some sim ulated d ata sets
to show its efficiency.
Some suggestions for future research are m ade in C h ap ter 6 and th e m ajor conclu
sions of th e thesis sum m arised.
C h a p ter 2
P r o n y ’s M eth o d
2.1
I n tr o d u c tio n
P ro n y ’s m ethod has a long history of application to the modelling of experim ental
d a ta as th e sum of exponentials. T he original form ulation due to Baron de Prony
(1795) is used to fit K real exponentials to K d a ta points. T he technique has since
been extended to cover com plex exponentials and larger num bers of d a ta points. In
this form it is widely used in m any signal processing applications.
This chapter details the conventional P rony’s m ethod. However th e im plem entation
of the algorithm and a study of its perform ance are left to the next chapter. After
th e outline of P ro n y ’s m ethod there follows a discussion of some theoretical results
th a t show th a t th e conventional P ro n y ’s m ethod does not provide statistically satis
factory estim ates. There are two alternative proposed m odifications. The G radient
C ondition Reweighting A lgorithm (GRA) is a modified P ro n y ’s m ethod th a t is sta
tistically consistent and th e O bjective Function Reweighting A lgorithm (ORA) is
shown, in a new result, to be statistically consistent when p articu lar constraints are
last two algorithm s for models w ith m any dam ped complex exponentials.
2.2
C o n v e n tio n a l P r o n y ’s M e th o d
P ro n y ’s m ethod for estim ating the param eters in a m odel expressed as a sum of
complex exponentials is a three-step procedure. Let th e d a ta be m odelled as
K
y ( n
) = ^
rke'<t>ke(-f>k+*‘2nfk)&tne^
(
2.
1)
k=\
for n = 1,2, . . . , 7V and where e(n) is a complex norm al random variable. For
this section we will assum e th a t th e d a ta y(n) are complex variates. For real d ata represented by a sum of K real sinusoids a m odel of the form (2.1) has 2K term s w ith each sinusoid expressed as a sum of a complex exponential and its complex
conjugate.
If the noise-free p art of th e m odel is referred to as p(n) it can be shown th a t the /x(n) satisfy a finite difference equation
K
fi(n) = — b(k)p(n — k) (2.2)
k=i
for n = K + 1 , . . . , TV. T he coefficients 6 ( 1 ) , . . . , 6(7V) are referred to as the Prony coefficients.
Now let Zk = e x p ( —bk + i 2i rf k)At and define th e polynom ial B [ z) = n £ = i(z — Zk).
Kay and M arple (1981) give a derivation of th e result th a t
B ( z ) = z K + 6(1)zk - 1 + b(2)zK~2 + •. • + b(K) (2.3)
which m eans th a t th e Zk are th e roots of th e K degree polynom ial form ed from the Prony coefficients. The frequencies and dam pings f k and bk can be obtained from th e roots Zk.
Using th e estim ates for fk and 6*. a second least squares problem can be solved to estim ate th e am plitudes r*. and phases <f>k.
In sum m ary then, the three steps of P rony’s m ethod are as follows,
i. E stim ate th e Prony coefficients b(k) in /i(n) = — Ylk=i b(k)ii(n — &)• ii. Use these estim ates to find th e zeros of th e polynom ial B ( z ) = z K -f
b( l ) z K~1 + b(2)zK~2 + . . . + b(K) = 0. iii. Solve for the r* and 0*.
Of course, in practice, we do not know the values of th e noise-free m odel /z(n) and
will have to use th e noisy d a ta y(n). As a result the results (2.2) and (2.3) become approxim ate and th e am ount of noise will affect th e accuracy of th e final param eter
estim ates.
Let th e noise-free p art of th e m odel be
fi(n) = y(n) - e(n),
then it follows th a t
K
y(n) - e(n) = /x(n) = ~ Y 1 K k ) (y(n ~ k ) ~ e(n ~ k) ) »
k=l
y ( n) = - 6(/:)y(n - A;) + ^ 6(^)e(n “ (2-4)
A:=l Jk=0
where 6(0) = 1. This is, in fact, an ARM A (autoregressive moving average) model.
Such models are difficult to estim ate. In th e NM R context w ith dam ped data,
th e usual m ethods which rely on assum ed statio n arity and th e calculation of au
tocorrelation coefficients will be unsuitable and iterative optim isation m ethods are
In practice it is usual to ignore the moving average stru ctu re of the error term in
(2.4) and to assume th a t the model satisfies
K
y{n ) ~ - K k )y{n - k) + e(n) say. (2.5) k= l
T he Prony coefficients are then estim ated as the least squares solution to th e overde
term ined system of equations
- b ( l ) y ( K ) - b ( 2 ) y ( K - l ) - . . . - b ( K ) y ( l ) =
—b ( l ) y ( N — 1) — b(2)y(N — 2) — . . . — b ( K ) y ( N — K ) = y( N) .
This is N — K equations in K unknowns.
The following section shows th a t the estim ates of th e Prony coefficients thus ob
tained do not satisfy desirable statistical properties. C hapter 3 discusses num erical
problem s associated w ith solving for th e b(k). These estim ates of th e b(k) obtained
from th e above set of equations are then used as th e coefficients of th e polynom ial
B( z ) = z K + 6(1)**“ 1 + . . . + b{K). •
T he K roots of th e polynom ial are where Zk is equal to exp(—6* + i2irfk)At.
By taking logarithm s of th e **, th e estim ates of the dam pings and frequencies are
obtained.
Let £ \ , . . . ,£k be th e estim ates of the Zk and let c* = for k = 1 , . . . , K .
T hen using th e estim ates Zk in th e m odel (2.1) gives th e following system of linear
equations to be solved for the ck.
u Z2 •
. \
. Z K
A z \ . • z 2ZK
( \ Cl
, ( U
1
• C2
=
»(2)
•
\ C K J v y ( N ) )
~ N
V $ *• • z k J v )
(
2
.6
)A discussion of the practical num erical considerations in solving this system of equa
tions for dam ped d a ta is given in C hapter 3.
2 .3
S e p a r a tio n o f V a ria b les in th e E x p o n e n tia l
M o d e l
To investigate some statistical properties of P ro n y ’s m ethod of param eter estim ation
we need to retu rn to th e original nonlinear least squares form ulation of the param eter
estim ation problem discussed in C hapter 1. T h a t is, for d a ta m odelled as
K
y i n ) = J 2 c*z k + e(n)
it= i
for n = 1,2, . . . , i V , th e least squares estim ates of th e param eters ck and z k(k =
1 , 2 , . . . , K ) are obtained by solving th e m inim isation problem as follows: m inciZ (j>(c, z) where <£(c, z) = (y - fi)H( y - /*),
and y = ( y ( l ) , . . . , y {n ))T ,
and /x = (E ? =i ckz k, Ejt=i c \ z \ , • .. , E fL i $ zk ) T •
This is m ore succinctly expressed as
where A(z) is the N x K m atrix
A(z) =
Z\ z 2 ... . Z K
7 2
z i z 2 .. z lK
z \ z 2 . .. z k
Z ( z j , Z2, . . . , Z/( ) j
and c is th e vector of complex am plitudes,
C = ( c i , c 2,. . - , C K ) T .
Recall th a t ck = r kel<f>k and 2* = e x p ( —bk + i2irfk) A t in th e term inology of th e first
chapter.
Thus th e objective function to be m inim ised is
(f)(c, z) = (y - A(z)c)// (y - A(z)c). (2.8)
In th e m odel (2.1) the param eters c i , . . . , ck are referred to as th e linear param eters
of th e m odel while th e exponentials Zi, . . . ,z k are th e nonlinear param eters. An
altern ativ e b u t equivalent objective function can be obtained by separating the
linear and nonlinear param eters. Golub and Pereyra (1973) show th a t for any fixed
value of z th e sum of squares
< t>
(C, z) = (y - /i)"(y - n)
is m inim ised by
c(z) = (A //A ) _1A //y
where the notation A(z) to show the dependence of A on th e param eters in z has
been simplified for convenience.
S u b stitu tin g this expression for c(z) into (3.2) gives
t/)(z) = <j>(c (z ),z )
= (y - A ( A H A ) ~ l A H y ) H ( y - A ( A HA ) _1A " y)
= y" (I - A ( A HA ) _1A W)H(I - A ( A ff A ) _1A w)y
= y H( I - A ( A ffA ) -1A w)y
= y " ( I - P A)y (2.9)
where I is th e Nx Ndentity m atrix and i P A = A(A'^A) - 1 A -1' is th e projection
m atrix on to th e column space of the m atrix A.
Thus an altern ativ e to m inim ising the objective function <^>(c, z) is to minimise ip(z)
w ith respect to th e param eters in z and then to use these estim ates of z to find
th e estim ates of c. However this still involves a non-linear optim isation and the
objective function can be fu rth er modified by introducing th e Prony coefficients.
Define th e N x (N — K ) m atrix X as
b{K)* 0
b(K — 1)* b ( KY
x =
6
(
1
)*
6
(
2
)*
6
(
0
)*
6
(
1
)* ...
0
6
(
0
)* • • •
\
0
0
0
0
where 6(0) = 1 and * denotes complex conjugate.
Hi)*
HO)*,
It follows th a t from (2.2) th a t
B ut X ^ /i = X wA c and thus X ^ A = 0, th a t is, the columns of X and A span
orthogonal spaces.
R eturning to (2.9) we see th a t
j/>(z)
= y " ( I - P A)y
= y " P x y
= y HX ( X HX ) - l X Hy. (2.10)
This form of rp(z) becomes th e objective function for th e first step of P rony’s m ethod
and ip(z) is m inim ised w ith respect to th e Prony coefficients 6(0), 6 ( 1 ) ,..., 6(A)
ra th e r th a n w ith respect to th e param eters z of the original model. The final step
to estim ate th e complex am plitudes rem ains unchanged and an interm ediate step of
solving for the z from th e Prony coefficients is introduced. This is ju st the step of
finding th e roots of a polynom ial discussed previously.
This separation of th e variables and expression of th e objective function in term s
of th e Prony coefficients appears in the works of Bresler and Macovski (1986), Ku-
m aresan, Scharf and Shaw (1986), and Evans and Fischl (1973). It is also dealt
w ith fully in the work of Osborne and Sm yth (1987).
To show the dependence of 'ip(z ) on the Prony coefficients b we can further modify
equation (2.10). Introduce th e (N — K) x K m atrix Y as follows,
y( k + 1) y(k) y (i)
y(k + 2) y{k + 1) ••• 1/(2)
y ( N) y ( N - l ) ■■■
It is easily seen th a t
X Hy = Y b .
S u b stitu tio n in (2.10) gives
il>(z) = xf>{b) = b HY H { X HX ) - 1Y b . (2.11)
The objective function ip is now m ore clearly shown to be a function of b. The statistical properties of the estim ates of the Prony coefficients and hence th e esti
m ates of th e frequencies and dam pings in th e model (2.1) depend on the statistical
expected value of ^>(b), or equivalently ip(z), and the m ethod used to m inim ise it.
In th e conventional P rony’s m ethod outlined in the preceding section th e first step
of solving an approxim ate least squares problem to estim ate
b
is equivalent to m inimising an objective function
= b ^ Y ^ Y b (2.12)
in which the central term of (2.11), ( X ^ X ) - 1 , is set equal to the id en tity m atrix.
This follows from equation (2.5) where the error term e ( n) is tre a ted as w hite noise. Kay and M arple (1981) acknowledge this deficiency in P ro n y ’s m ethod and refer to
th e suboptim al conventional P rony’s m ethod as the extended P r o n y ’s method.
T he function
?/>(b)
which is to be m inim ised is a non-linear function of th e Pronycoefficients
b
so an iterativ e optim isation procedure m ust be used. It is reasonableto assum e th a t a solution to the conventional Prony algorithm , (2.12), will provide
startin g values for this iteration. It is also w orth noting at this point th a t th e Prony
coefficients will be constrained in some way leading to a constrained optim ization
problem . T he usual constraint is to require th a t 6(0) = 1. T he constraint b ^ b = 1 is
also frequently used and others are possible. K ahn, M ackisack, Osborne and Sm yth
(1991) investigate the effect of th e scaling of
b
on th e behaviour of th e solution toth e constrained optim isation. They show th a t it is far from trivial in m any cases.
A full statem e n t of the m inim isation problem is now given as follows,
minV>(b) = b HY H( X HX ) - ' Y b (2.13)
b
subject to the constraint 0 (b ) = 1.
T here are two proposed m ethods for solving this problem , th e modified Prony al
gorithm of Osborne and Sm yth (1987) and the supposedly m axim um likelihood
m ethod proposed by Bresler and Macovski (1986). The differences between the two
m ethods depend on th e interrelationship between th e upd atin g of the estim ates of
b and th e solution of the statio n ary points of th e constrained objective function.
Osborne and Sm yth find th e gradient of th e constrained objective function, th a t is,
V(V>(b) + A(rf(b) - 1))
and set this equal to zero. This is th e necessary condition for the objective function
to be m inim ised subject to the constraint and A is a Lagrange m ultiplier. The
solution to this can be expressed as a nonlinear eigenvalue problem which is solved
for new estim ates of
b
given th e current estim ates. K ahn et al. refer to this asGRA, th e G radient condition Reweighting A lgorithm and a full discussion of this
algorithm is given in th e following section.
Bresler and Macovski u p d ate th e objective function directly and tre a t ( X ^ X ) -1 as
constant for each iteration. This reduces th e problem to a quadratic m inim isation at
each iteratio n . K ahn et al. refer to this as ORA, th e O bjective function Reweighting
A lgorithm . Bresler and Macovski call it th e IQML algorithm for Iterativ e Q uadratic
M axim um Likelihood. Section 2.5 of this chapter shows, however, th a t the resulting
estim ates are not m axim um likelihood.
2 .4
G r a d ie n t C o n d itio n R e w e ig h tin g A lg o r ith m
In this section it will be assum ed th a t real models are being used, th a t is
K
y ( n) = ocke~ßktn (2.14)
k = i
for n = 1 , 2 , . . . , TV and where a k is real and ß k has a positive real p art and, if the im aginary p a rt is non-zero, then the complex conjugate of ß k also occurs with the sam e a k. This leads to models of th e form
K
y ( n ) = a k e ~ 0ktn cos ( f kt n + <t>k)
k=i
where, in this case, the ß k are real. T he real and im aginary p arts of the complex NM R Free Induction Decay can be m odelled in this way w ith K equal to twice the
num ber of peaks.
To discuss some statistical properties of the estim ates of
b
we need to look at theasym ptotic behaviour of th e estim ates as th e num ber of d a ta points tends to infinity.
For tran sien t d a ta if t n becomes infinite as n increases, for exam ple t n = n, then u ltim ately th e d a ta being collected gives no inform ation on the m odel param eters.
For large enough n th e d a ta would ju st be noise. We thus require th a t the num ber
of observations becomes infinite while t n rem ains w ithin a finite tim e interval. This interval is chosen to be [0,1] and, for exam ple, for equally spaced points in tim e
t n = n / N .
Osborne (1975) and O sborne and Sm yth (1987) show th a t the objective function
V>( b) = bTY T(XTX ) - 1Yb
= y TX (X TX )_1 X r y
is independent of the scaling of
b
b u t im pose th e constraintbTb
= 1 so th a t theelem ents of
b
rem ain finite. They show th a t the necessary condition forto be a m inim um is achieved when its gradient w ith respect to b is zero, th a t is
(B (b ) - AI)b = 0.
In this form ula A is the Lagrange m ultiplier and B is the
(K
+ 1 ) x(K +
1) sym m etricm atrix function of b w ith elem ents
B
h = y TX i(X TX ) - 1x T y - y TX ( X TX ) _1X f X J (X TX ) _1X Ty (2.15)rs - y
where X , = th a t is, a m atrix of zeros and ones.
T he fact th a t 0 ( b ) is independent of the scale of b implies th a t A = 0 and the
iterativ e optim isation proceeds as follows: Given an estim ate b
^
solve(B (b W ) - A(*+1)I)b<fc+1>
=
0 (2.16)b(fc+1)Tb (fc+1) = 1
w ith A^+1) being the eigenvalue nearest to zero of B ( b ^ ) and
b^k+v>
its corresponding eigenvector.
This can be solved by the m ethod of inverse iteratio n and details of its im plem en
ta tio n are given in O sborne and Sm yth (1987). The sim ilarities between the GRA
m ethod and P isarenko’s m ethod for frequency estim ation of purely harm onic d ata
are outlined in K ahn et al. (1991). In Pisarenko’s m ethod th e solution for the coef
ficients b is given by th e eigenvector corresponding to the eigenvalue closest to zero
of th e variance-covariance m atrix.
It is also shown in O sborne and S m y th ’s work th a t estim ates of th e Prony coeffi
cients obtained by this m ethod are statistically consistent. T h a t is, as the num ber
of d a ta points becomes infinite th e estim ates of th e elem ents of b tend to the true
values which can be calculated as elem entary functions of th e dam ping param eters
of th e model. One problem w ith the conventional P ro n y ’s m ethod is th a t the lim
iting values of th e coefficients for the recurrence m odel discussed here are in fact
ju st m ultiples of th e binom ial coefficients and do not give any inform ation about
the dam ping param eters. Osborne and Sm yth prefer to use an alternative form for
th e initial difference equation (2.2). Their difference fo rm leads to a theoretically rigorous developm ent of th e asym ptotic statistical behaviour of estim ates of
b
obtain ed by th e GRA algorithm . T he behaviour of th e recurrence fo rm can be derived from th e results for the difference form. However as the recurrence form given in
(2.2) is th e form ulation in com m on usage this thesis will not expand on the differ
ence form ulation except to acknowledge its superior statistical properties. Further
discussion appears in K ahn et al. (1991).
At this point it is worthwhile showing th a t the conventional Prony procedure does
not lead to statistically consistent estim ates of
b.
From equation (2.12) we haveth a t th e conventional Prony m ethod minimises
bTY TYb
subject to</>(b)
= 1. Thenecessary conditions for this are
Y r Yb = AV^»(b)T
where
A
is the Lagrange m ultiplier associated w ith th e constraint.W riting y(i) = fi(U) + e,- = m + et- for i = 1 , . . . , N where et- ~ N (0, cr2) and the et- are independent we have th a t, as n —► oo,
1 T
- Y t Y
n(
(h k+i + ejc+i) ••• (/*n + ejv)
^
(/H + ei)
( l * N - K + z n-k ) }f
(
v k+ i + e /c + i) (^ i + ei)^ (/ijV + ejv) • * • { f ^ N - K + cN - k ) I
Jo
' 1 . . . ^
+ <t2I + negligible term s.
\
1 1exponentials in the model. The second term is the lim iting contribution of the
stochastic p art of Y TY and it is th e same order of m agnitude as the contribution
from /i. This m eans th a t th e objective function used in the conventional Prony’s
m ethod has a significant portion which is subject to the random variability of the
data. T he resu ltan t Prony coefficient estim ates will also be highly variable for
significant noise. So P ro n y ’s m ethod is inconsistent, th a t is, the estim ates of b do
not converge to th e tru e values as the num ber of d a ta points increases in a finite
interval. For d a ta sets w ith high signal to noise ratio this will not be of great concern
b u t for low signal to noise it m eans th a t th e usual im plem entation of P ro n y ’s m ethod
is not a reliable estim ation technique.
R eturning to th e GRA m ethod, it is shown by Osborne (1975) and Osborne and
Sm yth (1987) to perform well on real, non-sinusoidal d a ta w ith relatively few term s
in th e model. K undu (1990) extends the GRA m ethod to complex d a ta and shows
th a t for one p articu lar m odel good estim ates of th e param eters are obtained. These
estim ates also satisfy desirable asym ptotic properties such as statistical consistency.
However the GRA m ethod does not appear to be as successful at estim ating the
param eters of models typical of NM R data. Keeping in m ind th e u ltim ate goal of
finding a successful estim ation technique for very large models it is unlikely th a t
asym ptotic conditions will prevail. Even d a ta sets of 1024 points are small when
hundreds of param eters have to be estim ated. For large models considerations of
num erical stability and sensitivity also become im p o rtan t.
T he im plem entation of th e GRA m ethod displayed extrem e sensitivity at two points
in th e algorithm . T he first was in th e calculation of (X TX ) -1 during the derivation
of th e m atrix B . A lthough X TX is theoretically positive definite, in practice this
property fails and various ad hoc m easures m ust be taken to continue the calcula
tions.
The second problem area is that in finding the solution to (2.16), that is in finding the
eigenvector corresponding to the smallest eigenvalue, we are solving for the b which
makes B singular. So for a b which gives an eigenvalue close to zero, the matrix B is
nearly singular. As a result, several different package routines for finding eigenvalues
can fail if the straightforward approach of finding the zero eigenvalue is used. It is
preferable to use the inverse iteration technique to find the eigenvector of the zero
eigenvalue and Stewart (1973) suggests implementing a Cholesky decomposition of
the matrix B when solving the ill-conditioned system of linear equations that arises
in this method. However the sensitivity of the (XTX )-1 calculation is such that the
GRA algorithm is not reliable even if a refined inverse iteration step is included.
Although these problems do not appear when estimating the parameters of small
models they inhibit the application of the GRA method to NMR data with complex
models with many exponentials.
The current version of the GRA algorithm is implemented to analyse real data.
Appendix 2.1 gives a derivation of the method for solving for the complex parameters
of a complex model from the two series of real data formed from the real and
imaginary parts of the complex data series.
Kundu (1990) avoids this complication by showing that the objective function can
be minimised by differentiating with respect to the real and imaginary parts of the
complex Prony coefficients b. The matrix B thus obtained is of the same form as
(2.15) with all transpose operations replaced by complex conjugate transpose.
It is not known w hether this problem is so acute for large models.
2 .5
O b je c tiv e F u n c tio n R e w e ig h tin g A lg o r ith m
This algorithm , referred to as ORA, differs from th a t of the previous section in th a t
th e objective function ra th e r th an its gradient is tre a ted as a function of the kth
estim ate of the Prony param eters in order to find th e (k-\-l)th estim ate. This m ethod is referred to as th e Iterative Q uadratic M axim um Likelihood m ethod by Bresler and
Macovski (1986). It is also used by K um aresan, Scharf and Shaw (1986) and appears
first in Evans and Fischl (1973). It is shown in this section th a t the behaviour of the
estim ates from this technique is influenced by th e constraints applied to the Prony
coefficients. This will affect th e success of th e ORA at estim ating param eters from
d a ta w ith significant am ounts of noise. This com plication of the ORA algorithm is
not previously discussed in th e literature.
T he m inim isation problem (2.13) is restated for convenience:
m in 0 ( b ) =
br Y (X TX )_1Yb
(2.17)b
subject to th e constraint
</>(b) = 1.
As in th e previous section th e discussion will be restricted to real d a ta and real
coefficients
b.
W riteM(b) = X r X
th en
M (b(t))
shows th e dependence of th e m atrixM
on th e k th estim ate ofb, b'*h
T hen a step of the ORA iteratio n takes th e formb<*+1>
= m inb7’Y TM (b(lc))~1Yb.
b,^(b)=lT he necessary conditions for this m inim isation are
Y TM(b<*>)_1Yb = AV^(b)r
(2.18)
where A is a Lagrange m ultiplier. By com parison w ith equation (2.15) it can be
seen th a t the term corresponding to the derivative of
M(b)
has been o m itted fromth e necessary conditions. Using th e notation of Osborne (1975) this term can be
expressed as
V TV
where/ Vi v2 n n \
. . . v n-k 0 . . . 0
j - 0 v i • • • v n-k- l v n-k • • • 0
^ 0 0 . . . V i V 2 . . . V N _ K J
and
v = M (b)-1Yb
and thusv TX T
=bTV T.
Consider th e statistical expectation of
bTV TVb
given th e tru e values ofb.
£ ( b TV TVb) = £ ( v rX TXv)
= E(bTY TM (b )-1M (b )M (b )-1Yb)
= E (yr X TM (b )-
1
X y).
S u b stitu tin g
y = /z + e
and recalling th a tX/z = 0
and E( e) =0
we have£ ( b TV TVb) = cr2tr(XTM (b)-1X)
= <72*r(M(b)"1X X T)
= a 2tr( I N- K)
= (N - K ) o r2
where £r(Ijv-*:) is th e trace of th e ( N — K) x ( N — K) identity m atrix . This is
equal to th e sum of th e diagonal elem ents of In-k- T he derivation of th e last two
lines uses stan d ard results on th e distribution of quadratic forms and th e trace of a
product of m atrices, for exam ple tfr(ABC) = i r ( C A B ) = tr(B C A ) . These can be found in tex ts such as Graybill (1961).
It can thus be seen th a t th e missing term in th e necessary conditions (2.18) becomes
norm al noise, m axim ising th e likelihood is equivalent to minimising the objective
function (2.13). As the ORA algorithm leaves out a non-negligible term in this
o p tim ization it is not a m axim um likelihood technique. However it is possible th a t,
for different constraints
0(b),
judicious choice of th e Lagrange m ultiplierA
will leadto statistically consistent estim ates of the Prony coefficients
b.
The proof of this usesth e difference form ulation m entioned in the previous section and then derives the
result for th e recurrence form from th e constraint in term s of th e Prony coefficients
for th e difference form. It shows th a t large stochastic term s in th e expression (2.18)
can be cancelled by specific com binations of A and
0(b).
A full proof, to appear inK ahn et al. (1991), shows th a t th e constraint should be expressible in term s of some
or all of th e squares of th e Prony coefficients, for exam ple,
||b||2
= 1 or 6(1)2 ~ 1*Some sim ulations follow later in this chapter to display this result.
We will now prove the less specific result th a t th e Lagrange m ultiplier is not zero
and thus th e form of th e constraint affects th e statistical properties of the ORA
algorithm . This contrasts w ith the statem en t of Bresler and Macovski th a t the
specific choice of th e scaling constraint does not affect th e final result. Both these
authors and K um aresan, Scharf and Shaw choose to incorporate other constraints
on th e Prony coefficients directly into th e calculation of th e m atrix M (b (fc)) at each
step of th e iterativ e procedure. These constraints ensure th a t th e resultant Prony
coefficients lead to dam ped or undam ped sinusoids as required by the model.
To show th a t A is not zero for th e ORA algorithm re tu rn to equation (2.18). The
gradient vector
V0(b)
can be considered as a product of a m atrixV0
and the vectorof Prony coefficients
b.
For exam ple, if0(b) = ||b||2
thenV0
is th e identity m atrix.Thus we can say th a t
E (bTY TM (b)~1Yb) = A£(bTV0b).
For th e constraint
0(b)
=1
th e expectationjF(bTV0b)
is equal to1.
Following thelines of the earlier proof of jF(bTV TVb) we have that
£'(bTY TM (b )_1Y b) = ^ ( y TX TM (b )-1Xy)
= (.
N - K ) ( j
2.
Thus the Lagrange multiplier A is equal to
( N — K ) a 2.
Returning to the GRA algorithm of the previous section, it can be shown that in this
case A is zero and the scaling constraint plays no part in the estimation procedure.
The proof is from Osborne and Smyth (1987). The GRA algorithm consists of
solving the generalized eigenvalue problem
(B(b) - AI)b = 0
where B satisfies equation (2.15). In this case the constraint 0(b) = ||b ||2 = 1 is
implicit. For other constraints the identity matrix is replaced by the matrix V0.
The objective function to be mimimised,
V>(b) = yTpxy
is independent of ||b|| and so a
must be orthogonal to b. That is,
t>T^ ^ = 2bTB (b )b = 0.
It follows that
b TB (b)b - b TAIb = 0
and so AI = b TB (b)b = 0 and thus the Lagrange multiplier A is zero.
This means that there is a significant difference in the implementation of the GRA
and ORA algorithms. In the former any constraint 0(b) = 1 can be used while, for
the latter, an inappropriate choice of scaling of b can lead to bad estimates.
To show the effect of the scaling constraint on the behaviour of the ORA algorithm
a simple model is used. It is
for n = 1 , . . . , TV where e(n) is normal noise.
The noise free part of the model satisfies the difference equation
T 6(2)/z1+i — 0
for i = 1 , 2 , . . . , iV — 1.
The rate constant ß is calculated from the root 2 of the polynomial 6(2) + b ( \ ) z = 0 as z — e~P/N.
The matrix Y =
»(
1
)
2
/(
2
) ^
y ( N - l )
and X T is the ( N — 1) x N matrix
/
6
(
1)
6(
2)
0 0 0 6(
1)
6(
2)
0 0 0 6(
1)
6(
2)
V
0 0
0
6
(
1)
6(
2)
It then follows that M (b ) = X TX can be expressed as6
(
1)2+
6(
2)2 6(
1)
6(
2)
0 6(
1)
6(
2)
6(
1)2+
6(
2)2 6(
1)
6(
2)
0 6(1)6(2) 6(l )2 + 6(2)2
V
6
(
1
)
6
(
2
)
6
(
1)2
+
6
(
2
):
Two different constraints on b are investigated by means of simulated data sets
with increasing noise and number of data points. The two constraints used are *(*>) = |(K 1 ) + 6(2))2 = 1 and *(b ) = |(6 (1 )2 + 6(2)2) = 1.
In both cases the iterative procedure involves calculating the objective function (2.17) for the current estimate of b then minimising it subject to the particular