Rochester Institute of Technology
RIT Scholar Works
Theses
Thesis/Dissertation Collections
1-2000
Hyperspectral imaging for bottom type
classification and water depth determination
Nikole L. Wilson
Follow this and additional works at:
http://scholarworks.rit.edu/theses
This Thesis is brought to you for free and open access by the Thesis/Dissertation Collections at RIT Scholar Works. It has been accepted for inclusion
in Theses by an authorized administrator of RIT Scholar Works. For more information, please contact
.
Recommended Citation
Hyperspectral Imaging for Bottom Type
Classification and Water Depth
Determination
Nikole
L.
Wilson
B.S., Engineering Mechanics, U.S. Air Force Academy
(1996)
A thesis submitted in partial fulfillment of the
requirements for the degree of Masters of Science
in the Chester F. Carlson Center for Imaging Science
of the College of Science
Rochester Institute of Technology
August 2000
Nikole L. Wilson
Signature of the Author _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
_
Acceptedby
Harvey E. Rhody
Ul2-~~
7J
THESIS RELEASE PERMISSION
ROCHESTER INSTITUTE OF TECHNOLOGY
COLLEGE OF SCIENCE
Hyperspectral Imaging for Bottom Type Classification and
Water Depth Determination
I, Nikole
L.
Wilson, hereby grant permission to the Wallace Memorial Library of RIT to
reproduce my thesis in
whole
or in part. Any reproduction
will
not be for commercial
use or profit.
Nikole L. Wilson
Signature of A u t h o r
-Nikole
L.
Wilson
CHESTERF.CARLSON
CENTER FOR IMAGING SCIENCE
COLLEGE OF SCIENCE
ROCHESTER INSTITUTE OF TECHNOLOGY
ROCHESTER, NEW YORK
CERTIFICATE OF APPROVAL
M.S. DEGREE THESIS
The M.S. Degree ofNikole L. Wilson
has been examined and approved by the thesis committee
as satisfactory for the thesis requirement for the
Master of Science degree in Imaging Science
Anthony Vodacek
Dr. Anthony Vodacek, Thesis Advisor
John R. Schott
Dr. John
R.
Schott
Rolando Raqueno
Mr.
Rolando V. Raquefio
John M. Waud
Dr. John M. Waud
Abstract
Many
recreational, military,
and commercial activities
take
placein
shallowcoastal
waters;
therefore, interest is
high in characterizing
these
areas.A variety
of
methods
have been
employed
to
determine
waterdepths
and
classify
the
bottom using
remote sensing.
This
research proposes
to
apply Philpot's
principal componentsalgorithm
for bathymetric mapping
to
a
MISI hyperspectral
image,
whereaspreviously
this
approachhas been
used on syntheticdata. A description
ofthe
principalcomponentsalgorithm
is
presented
along
with an outline ofhow it
wasapplied
to
airbornehyperspectral images. The
algorithmtakes
advantage ofthe
ability
to
implement
adeep-water
correction,
and
in
this
linearized
space,
perform an eigenvector analysisto
determine
maximum variancein
the
data,
whichis
relatedto
depth. Unsupervised
classification
was
performed onthe
first
two
principal componentscores,
resulting in
a
qualitative
depth map
andbottom
type
map.An
extensive water measurement campaign was conductedin Lake Ontario in
order
to
characterizethe
optical properties ofthe
waterat
the
time the
MISI
images
were
taken.
These
properties were used asinputs
to the
HydroMod
radiativetransfer
modelin
order
to
generatesensor-reaching
radiance valuesfor
variousdepths
and overdifferent
bottom
types
characteristic ofa
test
site
onthe
centralNew York
shore
ofLake Ontario.
A
principal componentsregressionwas performedusing
the
algorithm-processedHydroMod
modelradiancesandimage
data
in
an
effortto
determine
the
inputs
to the
image,
i.e. depth
andbottom type,
withouthaving
a
prioriinformation. The limitations
ofAcknowledgments
This
thesis
represents a
tremendous
accomplishment
in
my
life,
one
whichI
couldnot
have
completed alone.
There
are
many
people
that
helped
me withthe
research
itself,
and
there
are
many
that
saw me
through
both
the
ups and
downs,
and
kept
megoing
with
their
friendship
and support.
First,
I
would
like
to thank
the
Air
Force
for
putting its faith in
me
by
giving
methis rare,
extraordinary
opportunity.
I
would
like
to thank
my
thesis
committee
for
their
time
andeffort
in
helping
me complete
this
research.
I
would
like
to
express
my
gratitude
to
Erich Hernandez-Baquero for
his
endless
patience, encouragement,
and
ideas
throughout
the
pastyear.
Also,
I
wouldlike
to thank
Rolando Raqueno
for
answering
countless questions
andhelping
meextensively
withHydroMod
runs,
as
well asagreeing
to
be
part ofmy
committee.
I
would also
like
to
recognize
Nina
Raqueno,
who went out ofher way
to
help
mecollect ground
truth
and
registerimages.
I really
appreciate
the
advice and
ideas
that
Kirk Knobelspiesse
andJohn Klatt
offeredin programming
and other aspects
ofthis
research.To Jonathan
Bishop,
I
owe adebt
of gratitudefor proofreading
this
document
and
providing
suggestions.
I
amvery
gratefulfor
the
adventurous spirit
ofStef
VanGorden,
who wasready
at a moment'snotice
to
climb over
rocksand
wadein
muckto
obtain much-neededASD
spectra.
I
wouldalso
like
to
thank
Bryce
Nordgren for
help
withMISI,
andRon Fairbanks
for getting
me
startedin
HydroMod. There
are
many
othersI
would
like
to thank
who
helped
out
in many
ways
-gathering
groundtruth, processing
data,
providing
advice.
Then,
there
arethose
peoplethat
kept
me sane
along
the
way
and never once
doubted
that
I
would accomplishthis
goal-God,
my
family, Beth,
old
friends,
and
all
of
the
wonderful newfriends I have
made
in Rochester
and nearby.Thank
you
Contents
List
of
Figures
ix
List
of
Tables
xii1
Introduction
1
2
Background-Literature Search
4
2.1
Radiance
Reaching
the
Sensor
4
2.1.1
Atmospheric Attenuation
5
2. 1
.2The
Air-
Water Interface
6
2.1.3 In
the
Water
7
2.1.3.1 Inherent Optical Properties
8
2. 1
.3.2Bulk
vs
Specific Inherent Optical Properties
13
2.1.3.3 Apparent
Optical Properties
16
2.2 Composition
of
Natural Water
19
2.2.1 Pure Water
19
2.2.2 Dissolved Salts
and
Gases
20
2.2.3 Dissolved Organic Matter
21
2.2.4 Suspended Matter
23
2.2.5 Algal Pigments
25
2.3 Shallow Water Reflectance
27
2.4 Previous Efforts in Bottom
Mapping
andBathymetry
31
2.4.1
Single Band Reflectance Model
32
2.4.2
Ratio Method
33
2.4.3 Other
Multispectral
Methods
37
2.5 Principal Components Method
44
2.6
Choosing
the
Method
50
3
Methods
52
3.1
Principal
Components
Analysis
52
3.2
Regression
55
3.3
Principal
Components
Regression
57
3.4
Water
Sampling
59
3.4.1
Filtering
60
3.4.3
Chlorophyll-a
62
3.4.4
CDOM
62
3.4.5
TSS
63
3.5
Bottom
Target Reflectance
63
4
Approach
64
4.1
The Image
64
4.2
Principal
Components Algorithm (Philpot
1989)
66
4.2.1
Pre-Processing
67
4.2.2 Deep-Water
Correction
68
4.2.3
The Algorithm
-Depth
68
4.2.4
The Algorithm
-Bottom Type
69
4.3
Inputs
to
HydroMod
70
4.4
The Forward Model
71
4.5
Applying
Principal
Components Regression
to
this
Research
...73
4.5.1
PCR Applied
-HydroMod
75
4.5.2
PCR Applied
-The Image
76
5
Results
77
5.1
Data Collection
77
5.1.1
Water
Sampling
77
5.1.2
Bottom
Sampling
79
5.2
MISIImages
84
5.3
Image Selection
91
5.4
Qualitative Results
94
5.4.1
Using
the
Entire Width for
Deep
Water
95
5.4.2
Using
Darker
Deep
Water
99
5.4.3
Consistent
Deep
Water
103
5.4.4
MoreResults
107
5.4.5
Ontario Beach Results
108
5.5
Building
the
Forward
Model
112
5.6
PCR
116
6
Conclusion
120
Works Cited
131
Appendix
A
"6
Appendix
C
1 -4
Appendix
D
List
of
Figures
2.1
Components
of Sensor-
Reaching
Radiance
4
2.2
Geometry
Used
to
Define Inherent Optical Properties
9
2.3
Pure Water Absorption
Coefficient
and
Absorption Cross-Section
Spectra
for
chlorophyll, total
suspended
minerals,
and
dissolved
organic carbon
indigenous
to
Lake Ontario
15
2.4
Pure Water
Scattering
Coefficient
and
Scattering
Cross-Section
Spectra for
chlorophyll and
total
suspended minerals
indigenous
to
Lake
Ontario
16
2.5
Optical Properties
ofPure Water
20
2.6
CDOM
Normalized Spectral
Absorption
Coefficient
used
in
HydroMod
23
2.7
Suspended
Matter Absorption
and
Scattering
Cross-Sections
In HydroMod
24
2.8
Chlorophyll
aAbsorption
and
Scattering
Cross-Sections
in
HydroMod
26
2.9
Ratio
Imagery,
Site
5,
North Hamlin Beach
36
2. 10 Scatter Plot
of X-
Values for
aircraft
bands C5
and
C7
38
2.11 Linearized Radiance Data for
the
Two-Band Case
47
2.12 Comparison
ofNoise
in Predicted Depth
Using
Simple Ratio
Vs. Optimal Coefficients
48
2.13 Linearized Radiance Data
-Constant
Water,
But
Varying
Depth
jAnd
Bottom Type
49
3.1
PCA
58
4.1
Components
of
the
Forward Model
71
5.1
HydroMod Sand
vs.Ontario Sand
-Reflectance Spectra
80
5.2
Green Algae Bottom Type
in
HydroMod
80
5.3
Gray
Rock
Wet
(Grocl_wet)
81
5.4
Grocl
wet
input
to
HydroMod
81
5.5
Gray
Rock
2
(Groc2)
82
5.6
Groc2_wet Input
to
HydroMod
82
5.7
Red Rock
(redrock_wet)
82
5.8
Redrockwet Input
to
HydroMod
82
5.9
Algae
on
Red Rock
(Rro_alg2)
82
5.10 Rro_alg2 Input
to HydroMod
82
5.11
Light
Gray
Rock Wet
(Ltgrol_we)
83
5.12 Ltgrol_wet Input
to
HydroMod
83
5.13 Yellow Rock Wet
(yrocl_we)
83
5.14 Yroclwet Input
to
HydroMod
83
5.16 Band 12 Noise
Problems
in C9
(Ginna)
85
5.17 Band 20 Noise
Problems
in C9
(Ginna)
85
5.18 R.G.B.Irmge
nearGinna
(GinnaFour
(Bands
24,15,5))
86
5.19
Y||OnGinna_Four
87
5.20
Y||
onGinnaFour Classified
87
5.21
Y_l
on
GinnaFour
87
5.22
Yi
onGinnaFour Classified
87
5.23
Image Band 48
from
a400
by
400 Portion
of
C9
88
5.24
GinnaFour Image Band 45
88
5.25 Y||Ginna_Seven
89
5.26
Yy
GinnaSeven Classified
89
5.27
Yi
Ginna_Seven
89
5.28
Yi
Ginna_Seven Classified
89
5.29
C9-R,G,B Image
ofGinna
91
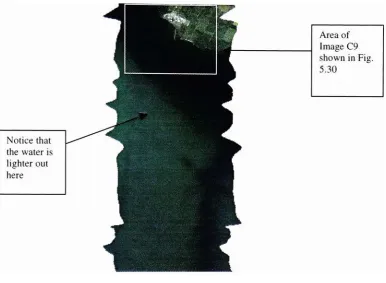
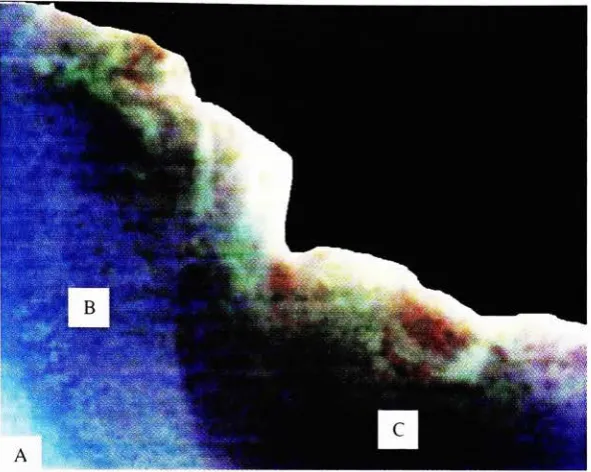
5.30 Smaller Portion
ofImage C9
Showing
Coastal Bottom Type
Variation
92
5.31
C2
-Along
Ontario Beach
and a
Spatially
Resized Portion
ofC2,
Ont_One
94
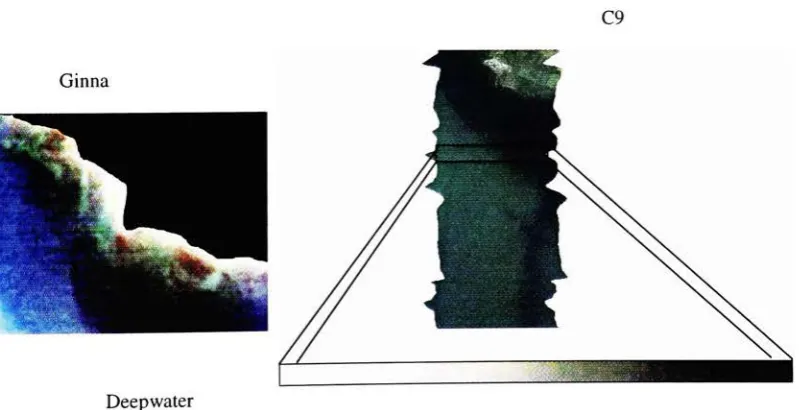
5.32 Image
Ginna
and
the
Deepwater Taken Over
the
Entire
Width
of
the
Image
95
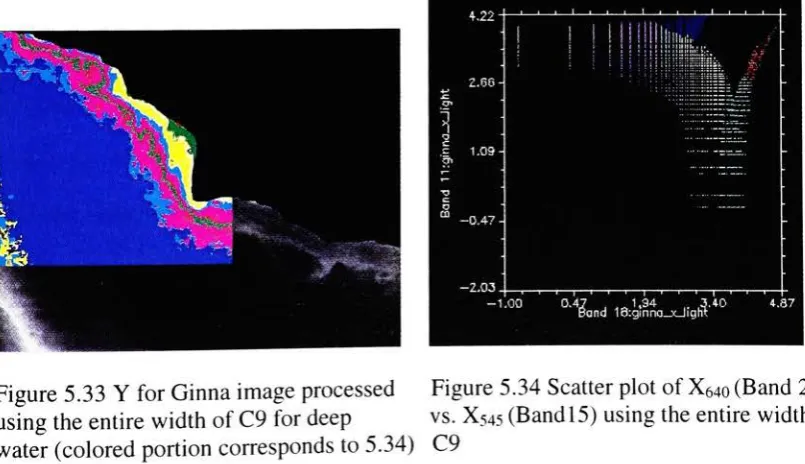
5.33 Y
for
Ginna Image Processed using
the
Entire Width
ofC9 for
Deep
Water
96
5.34
Scatter Plot
ofX640
vs.X545 Using
the
Entire Width
ofC9
96
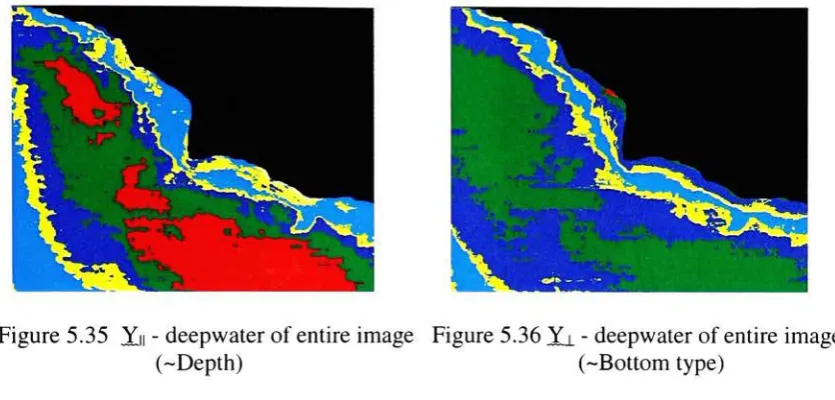
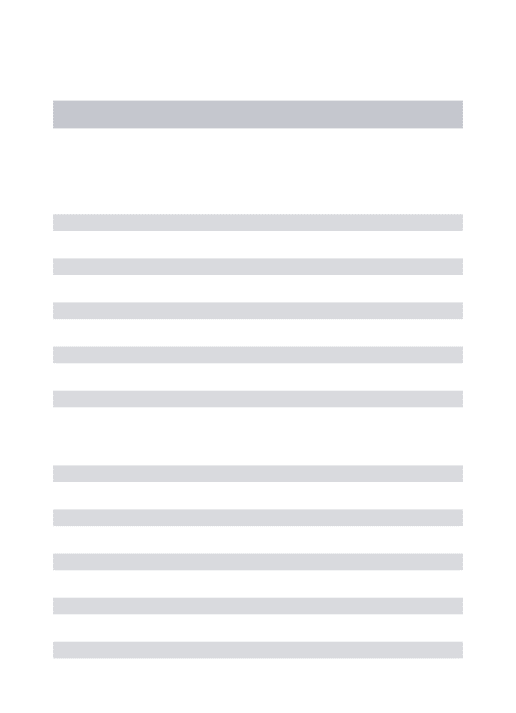
5.35
Yr
Deep
Water
ofEntire Image
(-Depth)
98
5.36
Yi-Deep
Water
ofEntire Image (-Bottom
Type)
98
5.37 Ginna Image
and
Deep
Water from
the
Right
Side
of
C9
99
5.38
Yy
for Ginna Processed With
Deep
Water
From Right
ofC9
100
5.39 Scatter Plot
of
X640
vs.X545
Using
the
Right
Side
of
C9
for
Deep
Water
100
5.40 Eigenvalues from PCA
onGinna Image Processed
Using Deep
Water
from
the
Right Side
ofC9
101
5.41
Y|,
Using
Deep
Water from Right
(-Depth)
102
5.42
Y
Using Deep
Water from Right (-Bottom
Type)
1
02
5.43
Yi
(-Bottom
Type)
is
Picking
Up
onVariations in Ginna Image
1 03
5.44 Image
and
Deep
Water from
the
Right
Side
of
Ginna
104
5.45 GinnaRight With Colors
Corresponding
to
5.46
104
5.46 Scatter Plot
ofX640
vs.X545
for Ginna_Right
104
5.47
Y||
(-depth)
-AT-means Classification
of
GinnaRight
Using
3
Classes
and4
Classes,
Respectively
1 05
5.49
GinnaLeft
With
its
Corresponding
Depth
and
Bottom
Type
Maps
107
5.50 GinnaMiddle With
its
Corresponding
Depth
and
Bottom
Type Maps
1 07
5.51 Image Near
Ontario
Beach, C2,
and
the
Image
jAreaSelected
for
Processing,
OntOne
109
5.52
Yy
for
Ont_One
110
5.53
Yn
Classified
for OntOne
110
5.54
Yi
forOnt_One
110
5.55Yi
Classified for Ont_One
110
5.56
Ground Truth Results for OntOne
Ill
5.57 Transmission
and
Upwelled Radiance
for September
3,
1999
1 12
5.58 Plot
of
Sensor-Reaching
Radiance for
a
Zero-Reflectance
Bottom
113
5.59
Sensor-Reaching
Radiances
atDepth
of
0.5
m114
5.60
Sensor-Reaching
Radiances
at
Depth
of1
m114
5.61
Sensor-Reaching
Radiances
at
Depth
of30
m115
5.62 Eigenvalues
from
the
PCA
onModel Data
116
5.63 Quantitative Depth Results for GinnaLeft
117
5.64
Quantitative Depth Results for GinnaRight
118
5.65 Quantitative
Depth Results for GinnaMiddle
118
6.1
C9 Image Near Ginna Power Plant
122
6.2
Y||-Deep
Water
of
Entire Image
(-Depth)
122
6.3
Yi-Deep
Water
ofEntire Image (-Bottom
Type)
122
6.4
Y||
Using Deep
Water From Right
(-Depth)
123
6.5
Yx
Using Deep
Water
From Right (-Bottom
Type)
123
6.6
Y||
(-Depth)
for Ginna_Right
124
6.7
Yx
(-Bottom
Type)
for
Ginna_Right
124
6.8
Smaller Portion
ofImage C9
(Ginna)
126
List
of
Tables
4.1
MISI Bandcenters for Visible
and
NIR
Bands
65
4.2
Inputs
to
HydroMod
72
5.1
Water
Sampling
Dates
and
Locations
-1999
and
2000
78
5.2
Sampling
Results for
Ginna,
September
3,
1
999
78
5.3
Ginna
(C9)
MISI Bands Retained
for
Algorithm
90
D.l
September
3,
1999
Chlorophyll-a
concentrations
-determined
Spectrophotometrically
1
67
D.2
September
3,
1999
Chlorophyll-a
values-determined
Fluorimetrically
1
68
D.3
September
3,
1999 TSS Values
168
D.4
September
3,
1999 CDOM Values
169
Chapter 1
introduction
An
advantage
ofremote
sensing
is
that
it
provides a synoptic
viewand can
help
reduce
the
amount of
time
and
money
spent
onsampling.
A
drawback
is
that
the
mtervening
atmosphere presents a challenge
to the
interpretation
ofremotely
sensed
images.
Remote sensing
overwater
is
aparticularly
difficult
task
because
the
water
is
anadditional
attenuation source.
Various
components
in
the
water act
asabsorbing
and
scattering
centers
for
the
radiationthat
penetrates
into
the
watercolumn.
Much
ofthe
researchthat
has
been
conducted on
remotesensing
overwater
has
been
concerned
withthe
oceans.Remote sensing
over
shallow wateradds one more
complexity
to
the
problem: reflectionfrom
the
bottom. The
radiancereaching
the
sensorover
optically
shallow waterincludes
not
only
radiationreflected
from
the atmosphere,
but
also
radiation reflectedfrom
the
surface ofthe
water,
from
the
water column
itself,
and
from
the
bottom.
Understanding
the
properties of shallow wateris important
because many
recreational and economic activities
take
place near
shore.Remote sensing is
a
tool that
can
be
used
to
understandthese
shallowwater
properties,
such asbottom
type
variation
and
depth.
For
example,
Monroe
County
is interested in
the
location
and
distribution
of
Rochester,
NY. The Monroe
County
Environmental Health
Laboratory's
"1998 Ontario
Beach
Monitoring
Report"states
that
decaying
algal plant
matter,
specifically
cladophoraand
spyrogyra,
was responsible
for
13%
of
the
beach
closures.
These
algae washup
onshore where
they
act as a substrate
for bacterial
growth and provide
to the
bacteria
a
shield
from
the
harmful
effects
ofultraviolet
light. In
coastal waters
there
is
a
relationship
between
high
levels
ofbacteria
known
as
indicator
bacteria,
which are
typically
found
in
the
presence
ofharmful
bacteria,
and
the
occurrences ofswimming-related
illnesses. The Health Lab is
interested
in
knowing
wherethe
algae aregrowing in
the
wateras part of
their
effort
to
manage
the
problem.
A
bottom
type
map,
producedfrom remotely
senseddata,
would
be
usefulin addressing
suchongoing
environmentalproblems.
The
algae
grow onhard
surfaces,
such asthe
rockcomprising
partsof
the
lake
floor
nearthe
Ontario Beach
area.
The
rock andalgae
reflectlight reaching
the
bottom
ofthe
lake
differently
than
the
surrounding sand,
whichis
the
reasonbottom
type
mapping
is
capable
ofdistinguishing
between
a
rockbottom
and a sand
bottom.
In
additionto
providing bottom
type
information for
applications such as
the
one
discussed
above,
remotesensing
of shallowwaters
canalso provide
depth information.
Photogrammetric
analysis ofthe
bottom
of
Tampa
Bay
providedinformation
aboutcirculation
patternsin
the
bay
whichwasextremely beneficial in
the
evaluation ofplans
for
dredging
the
bay
(Rosenshein
etal.
1977).
However,
interpretation
of aerialphotographs
using
photogrammetry
is
limited
because
waterdepth
variations are not
calls
for
a
technique
which will
distinguish
the
variation
in
bottom
type
reflectancefrom
the
variationin
the
reflectance spectra
due
to
absorption and
scattering
withinthe
watercolumn.
This
is
the
problem addressed
in
the
current research.
This
research contributes
in
three
ways
to the
study
ofusing remotely
sensed
imagery
to
gaininformation
about
depth
and
bottom
type
in
shallow,
coastalwater.
First,
the
algorithmused
here
was
implemented
ona
hyperspectral image
taken
by
the
Modular
Imaging
Spectrometer Instrument
(MISI),
ratherthan
a synthetic
data
set.
This involved
identifying
the
challenges ofusing
realdata,
working
aroundthem,
andanalyzing
the
algorithm's
limitations
The
algorithm wasimplemented
to
determine
qualitative
depth
and
bottom
type
information
from
images
taken
atthe
Ginna
power plant and nearOntario Beach.
Second,
the
research showsthe
usefulnessof
the
bottom
classification
map
to the
County
Health Lab in
their
managementefforts
to
prevent
beach
closures
due
to
algae
washing
up
onthe
shore.The
third
contributionis
taking
Philpot's
algorithmin
a
newdirection
by
using
principalcomponents regression(PCR)
to
quantitatively
determine
the
unknowns(depth,
bottom
type,
watertype)
that
combine
to
form
animage
over
shallowwater.This study illustrates how
the
radiativetransfer
modelHydroMod
can
be
usedas
a modelto
simulatethe
conditions under whichthe
Lake Ontario
MISI
images
weretaken,
calculating sensor-reaching radiances,
whichwere
then
usedto
Chapter
2
Background-Literature Review
2.1
Radiance
Reaching
the
Sensor
Remote
sensing
over
shallowwater
is difficult because
of
the
various components
that
contribute
to the
radiance
that
reaches
the
sensor.
There
are
essentially
two
components
that
make
up
the
sensor
reaching
radiance.The
first is
the
upwelled radiancescattered
from
the
atmosphere
(blue
arrowin Fig. 2.1). The
second
is
the
radiancereflected
from
the
scene,
composed
ofthree
different
parts:
(1)
The
radiance reflected
from
the
surface of
the
water(green
arrowin
Fig
2.1),
(2)
watercolumn reflected
radiance
(violet line in
Fig
2.1),
and
(3)
bottom-reflected (orange
arrow
in
Fig
2.1).
The
radiative
transfer
model,
HydroMod,
can
be
used
to
understand
the
componentsshown
in
Fig. 2.1. HydroMod
is
a
tool
for
calculating
radiancedistributions using
realistic environmental
conditions.
It
uses
the
Air
Force Laboratory's MODTRAN (Berk
1989),
one
ofthe
most accurate radiative
transfer
computermodels
available, to
calculatethe
atmospheric conditionsthrough
which
photonstravel
ontheir
pathtoward
the
watersurface and
again
ontheir
returnto the
sensor(Fairbanks 1999).
The HydroMod
programconsists
offour
modules(Fairbanks 1999). The first
module
calculates
the
input
radiance
distribution using MODTRAN
to
calculateatmospheric conditions.
The
secondmodule
involves
the
transition through the
watersurface
both
into
and
out ofthe
water.The
third
modulehandles
the
propagationandreflection underwater.
This
is
accomplishedusing
Dr. Mobley's Hydro light
code(Mobley 1995,1996)
to
solvethe
radiativetransfer
underthe
water.Finally,
the
light is
propagated
back
through the
atmosphereto
the
sensorusing
MODTRAN.
2.1.1
Atmospheric Attenuation
The
radiancereaching
the
sensorover waterfirst
passesthrough the
atmospherewhere some of
it
is
scattered and some ofit is
absorbed.Direct
solar radiationis
scattered
and
absorbed,
but
stillproceedsfrom
the
generaldirection
ofthe
sun,
as
opposed
to
diffuse sky
radiation,
which resultsfrom scattering
by
aerosols and airmolecules.
Bukata,
et
al.(1995)
define
the
atmospheric attenuationcoefficient,
cs(A),
as
the
fraction
of radiantenergy
removedper unitdistance
due
to
absorptionandscattering
summationof
the
attenuationcoefficients
due
to the
various
componentsthat
comprisethe
atmosphere.Attenuation
by
the
atmosphere
is
a result of
molecular(Rayleigh)
scattering,
aerosolscattering,
and absorption
by
gases.
The
atmosphere
interferes
with
the
signalfrom
the
water, requiring that
its
effectbe
removed
in
orderto
analyze
the
scene.
The
algorithmimplemented
here
onMISI
images
subtracts
off
the
effect ofthe atmosphere,
based
onthe
assumptionthat the
atmosphereis
invariant
overthe
scene,
in
a procedure
termed the
"deep-water
correction".The
radiative
transfer
model,
HydroMod,
was
usedto
modelthe
conditions under whichthe
MISI
images
weretaken, resulting in sensor-reaching
radiance values.2.1
.2The
Air-Water Interface
Photons
not scatteredby
the
atmosphereinteract
withthe
watersurface.At
the
surface,
they
are
eitherreflected, refracted,
ortransmitted.
Refraction
ofthe
light
is
governedby
Snell's
Law,
na
sin9a
=nv
sin
Gv
(2.1)
in
which a and w referto
air andwater, respectively,
and nis
the
index
of refraction.The
angle,
6,
is
the
anglebetween
the
direction
ofthe
photonflux
andthe
in-water
normal.The
reflected photonflux
is
givenby
Fresnel's
reflectanceformula. For
_tan2(fl,-flr)
11
tan2(0,+0f)
For
parallel polarized
light,
the
reflectance
is
(2.2)
_sin2(,-flr)
sin2(0,+0r)
P
=-.2
(2.3)
And
for randomly
polarizedlight,
5sin2(fl,-flr) |Q5tan2ffl-^)
sin2(#, +0,)
'
tan2(#,
+8r)
(2.4)
Further
information
onthe
air-waterinterface,
including
the
impact
ofwaves,
is
givenin
Bukata
(1995)
and
Mobley
(1994).
2.1.3
In The Water
As
discussed,
the
atmosphericand
watersurface
interactions
are accounted
for in
HydroMod (Fairbanks 1999). HydroMod
also accounts
for
the
in-
waterinteractions,
but
the
water propertiesare
required.The
groundtruth
gatheredfor
this
project allows
the
optical
propertiesofthe
waterto
be determined
and used asinputs
to
HydroMod. The
Case 1
waters are
those
waters
that
have
ahigh
concentration
of phytoplanktoncompared
to
colored
dissolved
organic matter and nonbiogenic particles
orwhere
the
phytoplankton
covary
with
the
other components.
Most
coastal
wateris
consideredCase
2
water
because inorganic
or colored
dissolved
organic matter
from
land drainage
are
important
and
may
notcovary
withabsorption
by
pigments,
suchas
chlorophyll(Mobley
1994).
This
research
is
concerned
withthese
coastal waters.
The
concentrations
ofthese
components
determine
the
optical properties ofthe
water.
There
are
two
different
categories of optical properties-apparent and
inherent.
According
to
Mobley
(1994),
apparent
opticalproperties are
those
properties ofthe
waterthat
depend
onboth
the
mediumand
the
structure ofthe
light
field,
andthat
are regularenough
to
providea
gooddescription
ofthe
water.Inherent
opticalproperties are
those
properties
that
depend solely
onthe
medium.2.1.3.1
Inherent Optical
Properties
The inherent
optical properties of waterinclude
the
absorptioncoefficient
a(A),
the
total
attenuation coefficientc(A), the
scattering
coefficient
b(X),
the
forwardscattering
probability
F(X),
the
backscattering
probability
B(X),
the
scattering
albedo<o0(A),
and
the
volume
scattering function
(5(9)
(Bukata 1995). Definitions
ofthese
properties aretaken
from
Mobley
(1994). Figure 2.2
showsthe
geometry
which willbe important in
defining
Od.)
<I)i/.i
>,</.!
Figure 2.2
Geometry
used
to
define
Inherent Optical Properties
(Mobley's
Fig
3.1)
Mobley
defines
a small volume
AV
of
water,
ofthickness
Ar,
whichis illuminated
by
a
narrowcollimated
beam
ofmonochromatic
light
Oj(A.),
W
nm"1.
Part
ofthis
incident
power
is
absorbedby
the
watervolume and
is designated &a(A).
Also,
some part ofthis
power
is
scattered
out ofthe
incident beam
at angle
y/,
and
is
termed
0s(y/;A).
The
powerin
the
beam
that
has
notbeen
eitherscattered
orabsorbed
is
transmitted
0(A)
through the
volume
of water.Assuming
that
no
inelastic scattering
occurs
andthe
photons
retaintheir
original
wavelengths,
underthe
conservation ofenergy,
<DJU)
=Oa(A)
+
<DJ(A)
+
<D,(A)
(2.5)
The
spectral
absorbance,
A
(A),
is
that
fraction
of
incident
power
that
is
absorbed within
the
volumedefined
above.Likewise,
the
spectralscatterance,
B(A),
is
that
fraction
which
power,
which
is
transmitted through the
volume.
These
three
quantities are
mathematically
defined below:
<D,(A)
0,(A)
K
}
0,(A)
(2.6) (2.7)
(2.8)
The
inherent
optical properties are
the
spectral absorption coefficient
andthe
spectral
scattering
coefficient,
whichare
the
absorptance and scatterance
per unitdistance.
The
spectral absorption coefficient
is
a{A)=Yxm^-{m'x)
Ar->0
fij-The
spectralscattering
coefficient
is defined
as
(2.9)
b{X)
=lim
^
(")
a/-->oAr
(2.10)
The
total
beam
attenuation coefficientis
the
summation
ofthe
absorptionand
scattering
coefficients,
c(A)
=a(A)
+
b(A)
(m~])
(2.11)
The
above
terms
describe
the
attenuationoflight propagating
through
water.
The
remaining inherent
optical propertiesdescribe
the
directionality
of
the
scattering
the
angular
distribution
ofthis
scatter:
the
angular scatterance per unit
distance
and
unitsolid
angle,
known
as
the
spectral volume
scattering
function is
givenby
i3{;A)
=lim lim
^^
=lim
lim
^'A)
(m^sr^)
Ar^om->oArAQ
Ar->oAn-o0,(/l)ArAQ
(2.12)
where
AQ
is
agiven solid angle.
The
spectral
powerscattered
into
this
givensolid
angleis
equalto the
spectral radiant
intensity
scattered
into
the
direction indicated
by
\\>times
the
given solid angle.Therefore,
^;A)Slim
IAy/U)
^^E,(A)AV
(2.13)
which
gives
riseto the
definition
that
the
spectral volumescattering function
is
the
scattered
intensity
per unitincident irradiance
per unit volume of water.Irradiance
(")
is
defined
as
the
rate at whichthe
radiantflux,
orpower,
is delivered
to
a surface.The
radiant
intensity (
/
)
describes
the
directional
information
aboutthe
flux (Schott 1997).
The relationship between
the
spectral volumescattering function
andthe
scattering
coefficientis defined in
the
following
formula
whereE
representsthe
unitsphere.
K
b(A)
=j/3(y/;
A)dQ.
=In
\/3(y/;
A)
sin y/dy/The
integration defined
above
is
typically
divided into forward
scattering,
overthe
angles
0
<
< 7i/2 and
backward scattering
over
the
angles rc/2 <
vj/<n.The
forwardscattering
coefficient,
bF,
and
the
backscattering
coefficient,
bB,
are
defined
as
follows
bF
=2k
\/3(y/)
sin y/dy/ 0,7
6fl
=2;r
J
P(y/)
sin^<i^
*d
(2.15)
(2.16)
Bukata
(1995)
explains
that
the
photons scattered
into
eitherthe
forward
orbackward
direction
are spoken ofin
terms
ofprobabilities,
orthe
fractions
ofthe total
scattered
flux
directed
into
each
hemisphere. The
forwardscattering
probability,
F,
is
the
ratio
offlux
scattered
into
the
hemisphere
ahead ofthe
incident
flux
to the
total
scatteredflux.
Similarly,
the
backscattering
probability,
B,
is
the
ratio of
the
flux
scattered
into
the
hemisphere behind
the
incident flux
to the total
scattered
flux
andthese
probabilities aredefined
in
the
following
equations.F
=^
B
=^
b
b
(2.17) (2.18)
The last IOP introduced here
is
the
spectralsingle-scattering albedo,
&>o,which
is
c(A)
(2.19)
2.1.3.2
Bulk
vs
Specific Inherent
Optical
Properties
Bulk
inherent
opticalproperties
(IOPs)
are
those
that
are
described in
the
previoussection
and are
based
onconsidering
the
watercolumn as
awhole
ratherthan
as
variouscomponents
that
absorb and scatter.
Specific
inherent
optical properties
arethose that
areattributed
to the
individual
components
in
the
waterthat
act
asabsorbing
andscattering
centers.
These
specificIOPs
arethe
ones
that
mustbe determined
whentrying
to
useremote
sensing
to
determine
concentrations
ofthe
various components
in
the
water.The
bulk
IOPs,
previously
defined,
are
simply
summations ofthe
individual
specificIOPs.
From Bukataetal.
(1995),
a(A)
=f^x,a,U)
1=1bW^xMU
B(A)b(A)
=fjx,B,WbM)
(2.20) (2.21) (2.22)
where
B(A)b(A)
=backscattering
coefficientat
wavelengthA (product
ofbackscattering
probability
and
the
scattering
coefficient)
Xj=concentration of
the
z'thcomponentof
the
water columnat(A)
=absorption coefficientat
wavelengthA for
a
unitconcentration of
bi(A)
-scattering
coefficient at wavelength
A for
a unit concentration
ofaquatic component
i
The
specific absorption coefficient and
the
specific
scattering
coefficient are
frequently
referred
to
as
the
absorption cross-section and
scattering
cross-section,
respectively.
Bukata
et al.
(1995)
states
that the
governing
principle
behind
the
remotesensing
of
the
organic and
inorganic
components of
wateris
that
the
opticalcross
sections provide
the
link
between
the
concentrations of
the
individual
components
in
the
water and
the
bulk inherent
optical properties.
If
the
concentrations
ofthe
individual
components
in
the
watercan
be
determined,
and
the
optical cross sections
ofthe
waterare
known,
the
total
attenuation ofthe
light
due
to
absorption
andscattering in
the
watercolumn
can
be determined.
Bukata
et al.(1995)
limit
their
opticalmodel
to
four
components,
whichare
followed
in
this
research.A
comprehensive
model,
whichconsiders
the
opticalcross
sections of
every
aquatic
componentin
naturalwaters,
is
unattainable.
Their
rationale
is
that
for
the
Great Lakes
waters,
only
a
smallloss in generality
occursdue
to
using
this
four-component
model,
as opposed
to
a model whichincludes
a
fifth
component,
nonliving
organics, to
accountfor detrital
matter.These non-living
suspended organics
rarely
dominate
the
colorof
inland
and coastal waters.
The four-component
model
includes
pure water
(W),
chlorophyll
(Chi),
dissolved
organic carbon(DOC),
and
a(A)
=aw
(A)
+
xxaCM
(A)
+
x2aSM
(A)
+
x^^
(A)
b(A)
=bw
(A)
+
xxbCM(A)
+
x2bSM
(A)
B(A)b(A)
=Biy(A)bw(A)
+
xi
BCh, (A)bch, (A)
+
x2BSM
(A)bSM (A)
(2.23)
(2.24)
(2.25)
The
coefficients
x/, X2,
and
X3
are
the
concentrations
ofchlorophyll,
suspendedminerals and
DOC,
respectively.
The
absorption
cross-section andscattering
crosssection
for
Lake
Ontario (Bukata
1995)
are shownin Figures 2.3
and2.4. Bukata
(1995)
makes reference
to
suspendedminerals,
but
this
component
willbe
referredto
here
as
suspended matter
because
this
researchdoes
notdistinguish
the
mineral
from
the
organicparticles.
D 4-B SOD C
I-0S9OLVED DRGA^C O-JWO"
Cr*jO*0**m.
.j_
a-jC vn S5Q 0O 650 TOO
Figure
2.3 Pure
water absorption coefficientand
absorptioncross-sectionspectra
for
chlorophyll, total
suspendedmineral,
and
dissolved
organic carbonindigenous
to
Lake
op o aoo mo oo 630 too
s
i
S
-00 5
-002
O*L0flQPLL 1
00 450 500 530 SOO Sao rao
Figure 2.4 Pure
waterscattering
coefficient andscattering
cross-section spectrafor
chlorophyll and
total
suspended
mineralsindigenous
to
Lake
Ontario
(Fig
5.6
ofBukata
1995)
In
orderto
generatethe
sensor-reaching
radiances,
HydroMod
requires
the
componentconcentrations
for
chlorophyll,
suspendedsolids,
andDOC. These
componentconcentrations
are
multipliedby
the
optical cross-sections oftheaquatic componentsincluded in
the
model.Updated
opticalcross-sectionsfor
these
components
in Lake
Ontario,
determined from processing
andanalysis
of watersamples,
are
included in
the
HydroMod
modelto
generate radiancedata,
withthe
exception
of pure water andchlorophyll.
These
updated cross-sectionsare
presentedin Section 2.2.
2.1.3.3
Apparent Optical Properties
As
stated
earlier, the
apparent optical properties(AOP)
depend
not
only
on
the
radiometric
quantity
other
than
radiance
is
used.
The
first
AOP
that
willbe discussed
here
is
the
irradiance
attenuation
coefficient,
K(Az). Bukata
et al.
(1995)
define
the
irradiance
attenuationcoefficient as
the
logarithmic depth
derivative
ofthe
spectralirradiance
at adepth
of
z.The
actual
definition
of
K(X
z)
results
from Beer's Law
(Bukata
1995)
and
is
derived below. A beam
oflight passing
through
a mediumloses
some
of
its initial
radiance
flux
value,
0mc,
due
to
absorptionloss
by
anattenuating
medium of
thickness
Ar,
and
only
0trans
remains ofthe
originalbeam
oflight,
according
to the
following
form
ofBeer's
law.
O
-O
=-oOAr
trans mc mc
(2.26)
or
AO
=-amcAr(2.27)
The
constant ofproportionality,
a,
is defined
as
the
absorption coefficient.Then,
in
the
limit
as
both
AcPand Ar
approachzero, the
equationbecomes
d
=-adr
O
which
is
Beer's Law.
Integrating
equation
2.28
from
r=0
to
a
distance
rin
the
absorbing
medium,
andknowing
that
the
beam
coefficient
is
afunction
of wavelengthyields
the
following
equation:
<S>(r,A)=(0,A)e-aU)r
(2.29)
and
consequently for
abeam
propagating vertically in
water,
E(A,
z)
=E(A,0
~)exp[-K{A,
z)z]
(2.30)
where
E(Az)
=the
value ofirradiance
atdepth
zandE(AO-)
=the
irradiance just below
the
air-waterinterface.
Finally,
Equation 2.31 defines
the
irradiance
attenuation
coefficient,
resulting from Beer's Law
being
usedto
describe
the
attenuation of spectralirradiance
withdepth
z(Eq.
2.30).
K(A,z)=
'
E(A,z)
6E(A,z)
dz
(m'1)
(2.31)
This AOP
shows
how
the
irradiance decreases
exponentially
withdepth
due
to
downwelling
irradiance
attenuation coefficient
Kd(Xz)
and
the
upwelling
irradiance
attenuation coefficient
Ku(Xz)
is
40U)
(2.32)
(2.33)
where
Ed
and
Eu
refer
to
the
downwelled
and upwelled
irradiances,
respectively.
For
areview
of
these
radiometric
terms,
referto
Schott (1997).
2.2 Composition
ofNatural Water
Natural
watersare composed
of amyriad of
living,
non-living,
and
once-living
material.
These
components
determine
the
optical properties
ofthe
waterthat
werediscussed in
the
previous section2.2.1 Pure Water
Pure
waterimplies
that the
wateris free from
the
scattering
and absorption effects
of organic
andinorganic
matter.
The
attenuationdue
to
pure
wateris due only
to
watermolecules.
Pure
watertypically
absorbsweakly in
the
blue
and green
regions ofthe
electromagnetic
spectrum.As Kirk
(1983)
states,
the
absorption
of pure waterincreases
above
550
nmand
is
quite significantin
the
red.Figure
2.5
shows
the
absorption and
scattering
spectra of pure
wateras
measuredby
Smith
and
Baker
(1981),
which are
the
Water
290 340 390 440 490 540 590 640 690 740 790 840 890 940 990
Wavelength
(nm)
-Absorption
Scattering
Fig. 2.5 Optical Properties
of
Pure Water (Smith
and
Baker
1981)
Above
550
nm,
the
attenuation of
light
by
pure water
is dominated
by
absorption and
the
total
attenuation
coefficientdue
to
pure water can
be
approximated as
the
absorption
coefficient
due
to
pure
water.However,
in
the
blue
region,
A
=400-520
nm,
scattering
by
pure
waterplays a
greaterrole
in
total
attenuation(Bukata 1995). The strong
absorption
in
the
red and weak
absorption,
but strong
scattering,
in
the
blue-green
region
of
the
spectrum causes
the
blue
appearanceof
water.2.2.2 Dissolved
Salts
and
Gases
Dissolved
salts and gases are not
included
in
the
four-component
model
discussed
earlier.
Dissolved
salts
do
affect absorption withinthe
watercolumn,
with
the
most
significant effect at
ultravioletwavelengths,
A
<
300
nm.
Molecular
scattering
in
compared
to the total
attenuation.
The
specific
directional
scattering due
to
purewater/dissolved salts plays a more significant role
in
molecular scattering.
However,
for
inland
waters,
the
ability
of
dissolved
salts
to
create a
directional
nature
to
/3(y/)
is
significantly
reduced compared
to
mid-oceanic waters
due
to their
much
lower
concentrations
in
fresh
water(Bukata 1995).
Dissolved
gases,
ofwhich
dissolved
oxygen
is
the
mostsignificant,
also
do
not produce significant changes
to
the
bulk
opticalproperties
ofthe
water,
and
therefore,
are
notincluded
in
the
model.
2.2.3
Dissolved Organic Matter
Dissolved
organic matter
(DOM)
does
nothave
asignificant
impact
onscattering
as evidenced
by
the
fact
that
it is
not
included
in Eq. 2.24. DOM
does, however,
impact
the
absorption
in
natural waters andis
often
the
dominant
component
in
the
opticalabsorption
of coastal water(Vodacek
et al.1997). The optically
activecomponent
ofDOM
is
referred
to
asColored Dissolved Organic Matter (CDOM). DOM is
a result ofexcretion, secretion,
ordecomposition
ofplants and animals
in
the
water,
or ofdirect
input
ofterrestrial
material.Plant
or animalmaterials are
transformed
into DOM
through
hydrolysis,
photolysis,
and
bacterial
decomposition
oftheir
cellular
structure.The
decomposition
ofplants and
animals resultsin
watersoluble
humic
substances
which areresponsible
for
the
yellow color observablein
someinland
and coastalwaters.
Although
these
pigments comprise
only
about40%
of
the
DOM,
the
yellowhue has
given rise
to
the
various
terms
givento
DOM,
suchas
coloreddissolved
organic matter
(CDOM),
Lake
Ontario displays DOM
concentrations
onthe
order of
2 g
C/m3,
whichis
fairly
low
compared
to
average
lake
water
concentrations
reported
in
the
literature
of9
or
10 g C/m
.(Bukata
1995)
An
absorption curve can
be
represented
by
the
following
relationship,
which
is
valid over
the
wavelengths
A
=350-700
nm,
ag(X)
=ag(Ao)
exp[-S(X-Ao)]
(Bricaud,
et all981) (2.34)
The
subscript, g,
stands
for
gelbstoff.
The
variable,
S,
is
aslope
parameterassumed
to
be
independent
ofwavelength.
The
values
for
the parameter,
S
(nm"1),
typically
range
between 0.010
to
0.020,
witha
mean value of0.014. The
referencewavelength,
Xq,
is
typically
arbitrary,
but usually in
the
UV
orblue.
Spectrophotometric
analysis
ofa
watersample,
filtered
to
removescattering
particles,
withthe
absorption
ofpure
water, subtracted,
becomes
anestimate
ofag(A).
The study
examined
the
wavelengths
between
A
=350-700
nmbecause
that
wasthe
range
ofthe
spectrophotometer
used.Below A
=350-700
run, there
were afew discontinuities in
some
ofthe
samples
measured,
but
the
absorptionbetween A
=350
nm
and
A
=700
nmreasonably
followed
the
law
shownin Eq.2.34. The
normalizedCDOM
spectral
absorption coefficient
ofLake Ontario
water(Fig.
2.6)
usedfor
this
study in
the
HydroMod
modelwas
determined from
samples collected onMay
20,
1999. A
spectral
absorption coefficient normalized
to
one at
350
nmis
usedin
the
workinstead
ofa
coefficient
is
multiplied
by
a scalar
to
arrive at an
appropriate
spectral absorption
coefficient.
The
scalar used
for
Lake
Ontario
waters was
0.2.
CDOM
3.5
2.5
T 2
E
1.5250 450 650
Wavelength
(nm)
850
-Absorption
Coefficient
Figure 2.6 CDOM
normalized spectral absorption coefficient used
in HydroMod
2.2.4
Suspended Matter
The
term
"suspended
matter"includes both
organic and
inorganic
matter.
Suspended
matter
is derived from
plankton,
detritus from
the
decomposition
of
phytoplankton,
zooplankton,
and macrophytic
plants,
as well as
terrigenous
suspended
particles
formed
by
erosion and
discharge. A large
portion of
this
suspendedmatter
is
suspended
minerals,
which
according
to
Bukata
(1981)
have
concentrations
in Lake
Ontario
of
0.2-8.9
g/m3.
The HydroMod
absorption and
scattering
cross-sections
for
suspended matter are
shownin Fig. 2.7. The
absorption cross-sectionwas generated
from
a curve
that
represents
the
average of a set of curves
measuredfrom
water
samples
cross-section curve measured and modified
by
Dr.
Vodacek
to
match
Bukata's
(1995)
curve.
Suspended Minerals
290 340 390 440 490 540 590 640 690 740 790 840 890 940 990
Wavelength
(nm)
-Absorption
Scattering
Figure 2.7 Suspended Matter Absorption
and
Scattering
Cross-Sections
in HydroMod
In
addition,
there
are
variousprecipitates,
a result of chemical
activity, that
can
affect
the
absorptionand
scattering
within a
waterbody. For
example,
Landsat
first
viewed chemical
precipitationsof
calciumcarbonate,
known
as
whitings,
in
the
Great
Lakes in 1973
(Strong,
1978).
As
surface waters
become
saturated with
Ca"""
ions in
the
summer
time,
a
biological
or
physical mechanisminitiates
the
whiting.Zooplankton feed
on
the algae,
detritus,
and
bacteria,
and
therefore
help
to
determine
the
status of
the
water.For
example,
a
highly
productive waterbody
will
have
a
higher
concentrationof
zooplankton,
whilethe
populationsof zooplankton
in
natural
the
availability
of
food,
and
otherfactors.
The
effect of zooplankton
on coloris
largely
unknown,
but
assumed
to
be
minor
due
to their
small concentrations
in
comparisonto
phytoplanktonand
bacterioplankton.
There
are alsobacterioplankton
in
the
water,
whichdo
notcontribute
to
the
overall water
color,
althoughthey
probably have
some
effect on scattering.Planktonic
fungi
arecolorless,
chlorophyll-free lower
plant
forms
consisting
of cellularfilaments
containing
spores.These
planktonicfungi
presentin
the
watercolumn are assumedto
have
negligible opticalimpact
onthe
optical properties ofthe
waterdue
to their
lack
ofcolor
in
additionto their
low
concentrations(Bukata
1995).
2.2.5
Algal
Pigments
Phytoplankton
cells contributeto
watercolor,
depending
ontheir
pigments.All
phytoplankton contain chlorophyll and
carotenoids,
whichare responsiblefor
photosynthesis.
All
greenalgae containchlorophylla,
andpossibly
b
and/or c.As
Bukata
states(1995),
the
ratio
of chl ato
chlb is
approximately
3:1,
and
therefore,
asBukata does in his
model,
the
researchhere focuses
onthe
presence of chl a.Chlorophyll
absorption occurs
in
the
blue
and red regions ofthe
spectrum(Fig.
2.8),
andis
moreChlorophyll
290
340 390440
490 540 590640 690
740 790 840890
940 990Wavelength
(nm)
-Absorption
?Scattering
Figure 2.8 Chlorophyll
a
Absorption
and
Scattering
Cross-Sections in HydroMod
(Bukata
1995)
Decomposed
chlorophyll,
in
the
form
ofphaeophytin,
must
be
accounted
for
because
it
causesa
peakshift
toward
shorter
wavelengthsin
the
blue
region and a peak
shift
toward
longer
wavelengthsin
the
red region.The
intensity
ofthe
absorption
for
this
chlorophyll
derivative is
weak comparedto the
intensities
ofthe
absorption
bands
of
chlorophyll,
but
an
estimateof
phaeophytinis
essentialto
determining
the
portion of non
living
phytoplanktonin
the
water.Understanding
these
propertieshelps
in derivation
of algorithms
for
determining
2.3
Shallow Water Reflectance
The
irradiance just below
the
surface
includes
the
flux
scattered
back
by
the
watercolumn
itself
(i.e.,
the
photons
that
never reach
the
bottom)
and
the
flux
scattered
back
from
the
bottom:
Eu(0)
=[Eu(0)]c+[Eu(0)]B
(2.35)
where
Eu(0)
=the
upwelling
irradiance just
below
the
surface
[Eu(0)]c
=upwelling
irradiance just
below
the
surface
due
to the
watercolumn
[Eu(0)]b
=upwelling
irradiance just
below
the
surface
due
to the
bottom
The derivation
ofthe
following
expressionfor
shallow
waterreflectance
is
included
in
Maritorena
et al.(1994),
who use somesimplifying
assumptions
in
orderto
derive
analytical
formulas for
shallow water reflectance.In
orderto
estimate
the
irradiance
due
to the
watercolumn,
they
model aninfinitely
thin
layer
ofthickness
dz
at
depth
z,
where
the
downwelling
irradiance
at
this
pointis
Ed(z)
.The
backscattering
coefficient
for
this
downwelling
light
is
bbd-
Then,
the
upwelling
irradiance
created
by
this
infinitely
thin
layer
of
wateris
dEu(z)
=bbdEd(z)dz
(2.36)
Ed(z)
=Ed(0)exp(-Kdz)
(2.37)
where
Ed(0)
is
the
downwelling
irradiance
at zero
depth
and
Kd
is
the
downwelling
irradiance
attenuation coefficient.
The upwelling
irradiance is
also
attenuated;
this
attenuation
is
expressed
by
(-kz),
where
/cisthe
vertical attenuation