International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
1
Axial Cardiac MRI Registration
H. Saadeh
1, S. Sarhan
2, M. Habeib
31 ,2University of Jordan, Amman, Jordan
3M. Habeib,Princess Sumaya University for TechnologyPSUT, Amman, Jordan
Abstract— This paper focuses on finding techniques that
can be used in cardiac magnetic resonance images semi-automatic registration in a simple and fast way. The suggested technique depends on using parts of one image selected by the user to be matched with another image of the same patient in order to find control points or correspondences between those two images. The experiment focuses on three techniques and compared between them, all techniques used the Gaussian pyramid in order to sample the images to the third pyramid level; which reduces the image size and so increases the performance time of matching; and then segment the target image into smaller images to be compared with the template image. The third matching technique is then used in intra-subject cardiac MRI rigid axial registration.
Keywords— Axial Registration, Cardiac MRI, Gaussian
Pyramid, Histogram, Image Registration, Image Matching.
I. INTRODUCTION
The central theme in basic image processing research is the development of new methods of image analysis, image presentation and data processing for use in diagnostics as well as treatment planning and implementation [1].
Image registration is the process of determining correspondences between all points in two images of the same scene, and is now widely used to Medical images [2]. It can also serve as a powerful tool to investigate how regional anatomy is altered in disease, with age, gender, handedness, and other clinical or genetic factors. One of the most obvious clinical applications of registration is the area of serial imaging. Comparison of scans from a given patient acquired over various time intervals can be routinely performed to follow disease progression, response to treatment and even dynamic patterns of structure change during organ development, this is what we called intra-subject registration [3,4]. While registration of images taken from different patients are called inter-subject registration. Finding the correspondences between images can be fully by computer systems in what is known by automatic registration, or by some help from the user known by semi-registration. The Registration can be made for images from different imaging resource (fusion) as well as images from the same resource [5].
Medical images registration in general is difficult because of the shapes and sizes variation of organs between individuals, and for the same patient during his treatment. Cardiac images registration is harder than other organs registration because of the non-rigid nature of heart and thorax, it is hard to image the same scene twice, beside of that cardiac images are different from other organs images such as brain images in that they have less distinguished features or landmarks, making the process of finding correspondences between images a complex job. For these reasons there are plenty of researches on brain images mean while heart images registration is a new field.
Gaussian Pyramid is a hierarchy of low-pass filtered versions of the original image, such that successive levels correspond to lower frequencies [6 - 8]. Each image in the pyramid is a representative of the original scene but in a lower resolution, (see Figure 1).
The low-pass filtering is done using convolution with a Gaussian filter kernel. Where the filter overhangs the image edges, it reflects the image about its edge. Since the lowest frequencies have been removed, the full-size image contains redundant pixels.
The Gaussian Pyramid is defined recursively as follows in Equation (1) and Equation (2).
[image:1.612.342.525.414.492.2]I is the original image at level 0, w[m, n] is the filter kernel of dimension [5 x 5]. For level, l=0.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
370
The next section lists some of the previous works on images registration according to the registration types, section three explain the techniques used to match then to register MRI cardiac images, Conclusion and Future work are included in section five and six respectively.
II. LITERATURE REVIEW
A. Registration Methods Based on Geometric Image Features
These methods can be divided into registration of a set of points and registration of edges and surfaces [9].
1. Point-Based Registration:
Often uses a set of pre-defined points to derive a spatial transformation, these points are usually called control points. Control points could be extrinsic, intrinsic or combination of both. Intrinsic control points, Landmarks, are derived from naturally occurring anatomical features, such control points are selected from anatomical features which are derived using segmentation techniques applied to the image contents. [10] developed a high-speed registration algorithm to correct for motion of the LV during real-time MRI scanning relative to a 4D prior volume that should improve intervention navigation and efficiency. The automated RT registration was able to correct for normal and exaggerated respiratory motion in healthy subjects with an accuracy comparable with retrospective, landmark registration by observers without time constraint. While extrinsic control points, markers, are derived from artificially applied markers, such as skin markers. The advantages of the point based registration methods are that they can be applied to any imaging modalities where markers or landmarks are visible and that the calculation of the registration parameters between two point sets is usually fast. But Registration of skin markers cannot guarantee registration of the heart within the body, since heart position changes with body position, respiration, and cardiac contraction. And there are few spatially accurate anatomical landmarks for heart images, also in some pathological conditions such as ischemia; the functional alterations can hide anatomical landmarks [11].
2. Edge and Surface based registration
Also called segmentation based registration methods, It involves the determination of corresponding surfaces in
different images and the estimation of spatial
transformation between these structures [9]. There are three popular matching approaches:
Head-Hat algorithm: Mostly used in brain studies, the surface of one of the images is used as the head and a set of points, extracted from the surface contours in the other image to represent the hat. The hat is then registered to the head by minimizing the distance of hat points from the head surface [12].
Hierarchical Chamfer Matching (HCM): a chamfer
distance map is generated from the surface of one of the images. This distance map is then used as a potential function for surface points in the other image and the total potential is minimized [13]. Iterated Closest Point algorithm (ICP): Images are
represented using points on a surface. In each iteration of the algorithm, the closest point in one image is determined for all points in the other image. These point correspondences can then be used to register the images using various spatial transformations [14].
B. Methods Based on Voxel Similarity Measures
These methods can be divided into registration based on moments and principal axes, intensity difference and correlation methods, and methods based on mutual information[9].
1.Methods based on Moments and Principal Axes:
Image registration methods based on moments and principal axes use statistical factors derived from image data. Moments describe the spatial distribution of the mass intensity of the image. Registration is performed by overlaying the centroids of the objects, and aligning the principal axes. If two images are identical except for a translation and a rotation, then they can be registered exactly by bringing their principal axes into coincidence. But these methods are sensitive to shape differences, so they are limited to be used. Despite its drawbacks, principal axes methods are widely used in registration problems that require no high accuracy, because of the automatic and very fast nature of its use, and the easy implementation [11].
2.Intensity Difference and Correlation Methods:
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
371
In [15] a two-step elastic medical image registration approach is proposed, which is based on the image intensity. In the first step, the global affine medical image registration is used to establish one to one mapping between the two images to be registered. After this step, the images are registered up to small local elastic deformation. Then the mapped images are used as inputs in the second step, during which, the study image is modeled as elastic sheet by being divided into several subimages. [16] presented two registration algorithms for the spatio-temporal alignment of cardiac MR image sequences. Both algorithms have the ability to correct spatial misalignment between the images caused by global and local shape differences. In addition, they have the ability to correct temporal misalignment caused by differences in the length of the cardiac cycles and by differences in the dynamic properties of the hearts. [17] proposed a new framework to propagate the labels in a heart atlas to the cardiac MRI images for ventricle segmentations based on image registrations, They used a method that employs the anatomical information from the atlas as priors to constrain the initialization between the atlas and die MRI images using region based registrations. [18] developed a framework for the automatic detection and segmentation of the ventricle and myocardium from multi-slice, short-axis cine MR images. They integrate a series of state-of-the-art techniques into a fully automatic workflow, including a detection algorithm for the LV, atlas-based segmentation, and intensity-based refinement using a Gaussian mixture
model that is optimized using the Expectation
Maximization (EM) algorithm and the graph cut algorithm. [19] presented a method to interpolate between neighboring slices in a grey-scale tomographic data set. Spatial correspondence between adjacent slices is established using a nonrigid registration algorithm based on B-splines which optimizes the normalized mutual information similarity measure.
Voxel property based methods using the full image content are theoretically they are flexible registration methods, since they do not start with reducing the gray valued image to relatively sparse extracted information, but use all of the available information throughout the registration [9].
3. Mutual Information:
Mutual information is an information theory measure of the statistical dependence between two random variables or the amount of information that one variable contains about the other.
Mutual information can be qualitatively considered as a measure of how well one image explains the other. The mutual information is maximized at the optimal alignment. No assumptions are made regarding the nature of the relation between the image intensities in the registered images. Therefore, the mutual information method is promising in particular for inter-modality registration. Inter-modality registration differs from intra-modality registration because different medical imaging modalities usually have different intensity characteristics and different resolutions, noise characteristics, and fields of view. Several normalized versions of the mutual information has been proposed because changes in overlap of very low-intensity regions of the image can disproportionately contribute to the mutual information measure. [20, 21] Have derived a local similarity measure based on joint entropy, which can operate on extremely small image regions. [22] developed a general nonrigid image registration algorithm. It uses spline functions to describe the deformation and uses multi-scale strategy to search for the optimal transformation. Then he presents a new registration operator that is transitive and symmetric. [23] adapted particle swarm optimization for single-slice 3-D-to-3-D biomedical image registration. A new hybrid particle swarm technique is proposed that incorporates initial user guidance.
III. PROBLEM SOLUTION
One of the main difficulties that faces researchers in image content-base retrieval and registration fields is the complexity of the methods used to define the similarities between images, and the time spend for matching due to the variation of shape, location, and size of the studied organ or object. The main idea is finding and testing matching techniques that are simple and could be implemented using threads to save time while comparing the images and gives good results in matching cardiac MRI images that are different in shapes and orientation. Three techniques are suggested to match template with target image, Gaussian pyramid 3rd level histogram, Gaussian pyramid 3rd level rmse, and non-base filtered Gaussian pyramid 3rd level histogram. The first technique compared between the histograms of both the template and each target segment using L1_norm; see Equation (3). The
segment with the lowest L1_norm value is considered to
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
372
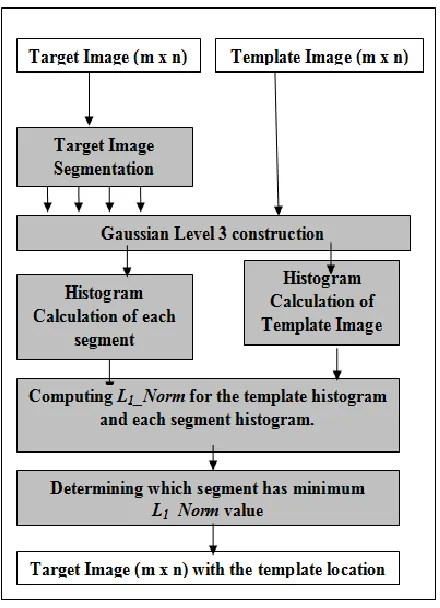
[image:4.612.330.557.120.364.2]The problem in using this approach is the time spend to compare the histogram of the template with the histogram with each segment due to the large number of segments in the target image, to solve this problem and to enhance the time of matching, Gaussian pyramid is used to sample both the target and the template image segments into multi-resolution images. see Figure 2.
Figure 2: Steps in Using 3rd Level Histogram in Matching.
Figure 3: Steps of the Second Technique.
The second technique used root-mean-square (rms) error; see Equation (4); to compare between the template and each of the segments. The segment with the lowest RMSE value is considered to match the template and is labeled. For enhancing matching time, Gaussian pyramid is used to sample the images into lower resolutions, see Figure 3.
[image:4.612.64.284.219.523.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
373
(4)M x
N
y
I
x
y
I
x
y
MN
e
rms ..1
0 1
0
'
(
,
)
(
,
)
2
1
1
/
2
The difference between this approach and the first one is that the original image (first level of the pyramid) is not filtered with Gaussian filter as the rest of the pyramid levels, while in the first technique each image of the pyramid was filtered using the Gaussian filter.
L1_Norm: an estimation of the difference amount between two vectors v and m.
Root-Mean-Square (rms) Error: an estimation of the error between two images,[23]. It estimates the differences amount between two images I’ and I both of size (M x N).
IV. EXPERIMENTAL STUDY AND ANALYSIS
A. Matching Techniques
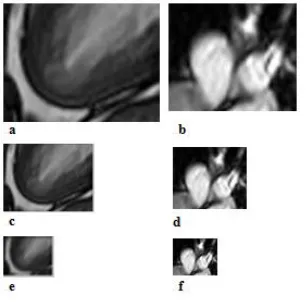
[image:5.612.342.540.315.400.2]The Apex 150X199 and arteries 135X161 template images shown in Figure 4(a) and Figure 4(b) were taken from a systole cardiac MRI images [25], to be compared with 90 degree diastole cardiac MRI images [25], Figure 4(c) through Figure 4(f) shows the second and the third Gaussian levels of the images.
Figure 4: a, b are the Apex and Arteries Templates, c -f are the 2nd
and 3rd Resolution of Images.
The image shown in Figure 5(a) is a rotated heart long axis MRI image in a diastole state obtained from Philips medical site [25].
This image is considered as the target image which will be resample into the 3rd level of the Gaussian pyramid Figure 5(b) and Figure 5(c) then each segment will be compared with both the apex and the arteries templates shown in Figure 4(e) and Figure 4(f). The aim of such comparison is to test the techniques in a case that have shape variations (systole to diastole) and orientation (0 to 90 degrees).
For the first technique the 3rd level image is constructed for both the template and the target images, then the target 3rd level image is segmented and each segment histogram is calculated to be compared with the template 3rd level image histogram. Figure 6(a) and Figure 6(b) show the result of matching the Apex and arteries templates with the target image.
Figure 5: a Rotated LA Heart Diastole MRI, b and c are the 2nd and 3rd Resolution.
[image:5.612.93.246.486.637.2]The located Apex segment is the one that has the minimum L1_norm value, it starts at pixel (72, 44), while the approximate Apex template location in the rotated image is at (83,21) so as we can see the shift in the x direction is -11, and in the y direction is 23 pixels.
Figure 6: a and b Apex and Arteries Segments Respectively.
The same procedure is done for matching the Arteries template with the target image, the L1_norm value of comparing both histograms at this segment was 630, the upper left pixel of this segment was located at (236,436) while the approximate template location in the rotated image is at (228,434) which makes the error shift value equals to 8 in the x direction and 2 in the y direction.
… (3)
_
1
i
i i
m
v
[image:5.612.334.553.502.612.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
374
[image:6.612.342.545.284.574.2]Figure 7 and Figure 8 show the L1_norm values for Apex and arteries located segments in both non-rotated and rotated heart systole and diastole images to compare between them. The same procedure is done for both the second and the third suggested techniques, the difference between the second and the third one is that the original images in the Gaussian pyramid are not filtered with Gaussian filter which enhance both time and results of matching, the second technique used direct pixel by pixel comparisons between the 3rd level template and segments calculating the rms error values between images see equation 4, it gives bad results regarding orientation and shapes variations. TABLE I shows a comparison of shifts results between the three techniques.
[image:6.612.62.275.304.432.2]Figure 7: L1_norm Values of Apex Located Segments.
Figure 8: L1_norm Values of Arteries Located Segments.
TABLEI
SHIFTS AVERAGES FOR EACH TECHNIQUES IN EACH DIRECTION
First Technique Second Technique Third Technique
X Y X Y X Y
10.7 20.8 86.3 71.8 11.9 14.6
B. Time comparisons using threads
In this section the time performance in seconds of applying the matching process for image’s 1st, 2nd, 3rd
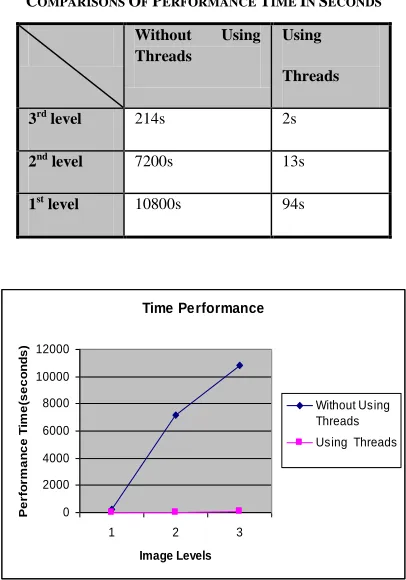
Levels with and without using threads are listed to be compare in TABLE II, the test was applied on the largest size target image (600 x 600) with a template of a size(150 x 199). Figure 9 shows a chart of the time performance of each level used in matching as we can see the largest the size of the image the largest the time spent in matching operation so that using the 3rd level was helpful in matching process even without using threads.
TABLE II
COMPARISONS OF PERFORMANCE TIME IN SECONDS
Without Using Threads
Using
Threads
3rd level 214s 2s
2nd level 7200s 13s
1st level 10800s 94s
Time Performance
0 2000 4000 6000 8000 10000 12000
1 2 3
Image Levels
Pe
rfo
rm
a
n
c
e
T
im
e
(s
e
c
o
n
d
s
)
Without Using Threads Using Threads
Figure 9: Time Performance Chart.
C. Cardiac Images Axial Registration
[image:6.612.50.288.458.614.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
375
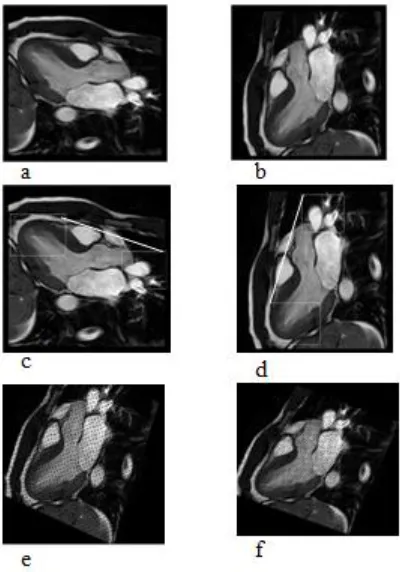
One of the major techniques used to align cardiac images is the axial registration, in which the axes or line of the heart is determined and the rotation amount is calculated, then by rotating this line in the right direction, the images will be aligned together to be compared later. This approach was tested using the non-rotated heart systole MRI with the rotated heart systole MRI, see Figure 10(a) and Figure 10(b).
[image:7.612.68.268.371.657.2]The registration system will use the third matching technique, due to its high results amongst the other techniques, to locate the Apex and the Arteries parts for each image. Figure 10(c) shows the heart MRI image with the two segments located and labeled in white box, a line is used to illustrate the procedure of aligning, Figure 10(d) show the rotated heart MRI image with both apex and arteries located and align shows the orientation of the image. By taking the starting points of the two located segment in each image, the slopes of the two lines will be calculated and then both images will be rotated to be aligned see Figure 10(e) and Figure 10(f).
Figure 10: a, and b Systole Rotated and Normal Image Resp. c and d the Apex, Arteries Segments Located, e and f both Images after
Alignment in the Same Direction.
V. CONCLUSION
Cardiac medical images in general is hard to be studied and registered due to the non-rigid nature of heart and thorax, the continuous movement of heart makes it difficult if not even possible to image the same scene in different imaging stages, so that the researches on this field are few.
This paper tested three different techniques to match images in order to find automatic control points. The first technique used the histograms of the third level for both target and template images to find the matched segment, the second technique used the root mean square error value to determine the match amount between the template and the segments, The third technique used the histograms of the third level for both target and template images to find the matched segment, without filtering the original image; level one image; of the Gaussian pyramid but filters both the second and the third levels with Gaussian filter.
The expirement finds out that filtering the second and third levels only of the Gaussian pyramid gives the best results amongst the other matching techniques, then comes the first technique which filters all of the pyramid levels with Gaussian filter, the third technique which used root mean square error to find amount of matching between images gives good results for images with small shape and size variations but didn’t work for other images.
Those techniques where tested on brain MRI image and vertebral column MRI and they gives good results, so those techniques may be tested for any organ in the body because they all depends on intensity values similarities and not on specific shapes of the organs.
REFERENCES
[1] Parvati Dev, Sandy Napel, and Geofrey Rubin. 1994. Medical Image Processing Studies, Center for Advanced Medical Informatics at Stanford.
[2] Chen, Mei. 1997 Knowledge-Based Deformable Matching for Pathology Detection. Unpublished Thesis Proposal, The Robotics Institute, Carnegie Mellon University, Pennsylvania, USA. [3] Makela Timo. 2003. Data Registration and Fusion for Cardiac
Application. Unpublished doctoral dissertation, Helsinki Universtiy of Technology, Espoo, Finland.
[4] Papademetris Xenois, 2006. Image Registration: A Review, Department of Diagnostic Radiology, Yale School of Medicine. Electronic Presentation.
[5] Karin Knearurek, Marija Ivanovic, Josef Machac, and David A.Weber. 2000. Medical Image Registration, Euorophysics News vol.31 No. 4.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 8, August 2013)
376 [7] Jolion, Jean-Michel. Gaussian and Laplacian Pyramids. 2000.Taken
from http://rfv.insa-lyon.fr/~jolion/IP2000/report/node78.html. [8] Konstantinos G. Derpanis. 2005. The Gaussian Pyramid. Electronic
unpublished paper. Taken from
http://www.cse.yorku.ca/~kosta/CompVis_Notes/gaussian_pyramid. pdf.
[9] Makela Timo, Patric Clarysse, Outi Sipila, Nicoleta Pauna, Quoc Wong Pham, Toivo Kalila, and Isabelle E. Magnin. 2002. Areview of Cardiac Image Registration Methods. IEEE Transactions on Medical Imaging, Vol. 21, No. 9.
[10] J. Satkunasingham1, D. Chung1, G. A. Wright1, and P. Radau. 2007. Fast Image Registration for Real-Time Cardiac MRI Guided Intervention. Imaging Research, Sunnybrook Health Sciences Centre, Toronto, Ontario, Canada Proc.
[11] Maintz, J.B.A. & Viergever, M.A. 1998. An Overview of Medical Image Registration Methods. (UU-CS1998-22 ). Utrecht, the Netherlands: Utrecht University: Information and Computing Sciences
[12] Audette Michel A., Ferrie Frank P., and Peters Terry M. 2000. An Algorithmic Overviwe of Surface Registration Techniques for Medical Imaging, Medical Image Analysis, Oxford University Press. 201–217.
[13] Alexander, M.E. 1999. A Fast Hierarchical Non-Iterative Registration Algorithm. International Journal of Imaging Systems and Technology, Vol.10, 242-257.
[14] Steven S. Harris and Richard A. Robb.2003. Piecewise Registration for Point-to-Surface Mapping of Cardiac Data, Biomedical Imaging Resource, Mayo Clinic and Foundation, Rochester., SPIE Digital Library, SPIE Proceedings Vol. 5029. 146-153.
[15] Xiu ying wang, David Dagan, Feng, Jesse Jin. 2002. Elastic Medical Iamge Registration Based on Image Intinsity, Australian Computer Society, Inc. Proceedings of the Pan-Sydney area workshop on Visual information. Vol.11. 139-142 .
[16] Perperidis Dimitrios, Mohiaddin, Raad H., and Rueckert, Daniel. 2004. Spatio-Temporal Free-Form Registration of Cardiac MR Image Sequences Medical Image Computing and Computer-Assisted Intervention (MICCAI 2004). Lecture Notes in Computer Science. Vol. 3216. 911-919.
[17] Zhuang, X; Hawkes, DJ; Crum, WR; Boubertakh, R; Uribe, S; Atkinson, D; Batchelor, P; Schaeffter, T; Razavi, R, and Hill, DLG. 2008. Robust registration between cardiac MRI images and atlas for segmentation propagation - art. no. 691408. In: Reinhardt, JM and Pluim, JPW, (eds.) MEDICAL IMAGINg. IMAGE PROCESSING, PTS 1-3. 91408 - 91408.
[18] Wenzhe Shi, Xiahai Zhuang, Haiyan Wang, Simon Duckett, Declan Oregan, Philip Edwards, Sebastien Ourselin, and Daniel Rueckert.2011. Automatic Segmentation of Different Pathologies from Cardiac Cine MRI Using Registration and Multiple Component EM Estimation. Functional Imaging and Modeling of the Heart. Lecture Notes in Computer Science Vol.6666.163-170.
[19] Penney, G. P., Schnabel, J. A., Rueckert, D., Viergever, M. A., and Niessen W. J. 2004. Registration-Based Interpolation, IEEE Transactions on Medical Imaging, Vol. 23, No. 7.
[20] Senthil.P. Ramamurthy. 2006. Medical Image Registration by Maximization of Mutual Information. Electronic Presentation, from:http://www.csee.wvu.edu/~adjeroh/classes/ee591/assessment/p rojects/selected/medicalImageReg.pdf .
[21] Rogelj, Peter, and Kovacic, Stanislaw.2001. Similarity Measures for Non-Rigid Registration, Medical Imaging: Image Processing, vol. 4322 of Proc. SPIE.
[22] ] Chou, Yi-Yu. 2004. Transitive and Symmetric Nonrigid Image Registration. Unpublished Master Thesis, Georgia Institute of Technology.
[23] Wachowiak, Mark P., Smolikova, Renta, Zheng, Yufeng, Zurada, Jacek M., and Elmaghraby, Adel S.2004. An Approach to Multimodal Biomedical Image Registration Utilizing Particle Swarm Optimization. IEEE Transactions on Evolutionary Computation, Vol. 8, No. 3.
[24] Gonzalez, Rafael C., and Woods, Richard E.2002. Digital Image Processing, (2nd ed.).New Jeresy:Prentice Hall,Inc.
[25] Heart MRI from Philips medical images, Retrieved December 20,
2005, from
![Figure 1: Gaussian Pyramid [6].](https://thumb-us.123doks.com/thumbv2/123dok_us/8726667.885642/1.612.342.525.414.492/figure-gaussian-pyramid.webp)