Chapter 6
Basics of Interrupts
(1 of 4)
• What is an interrupt?
– A special event that requires the CPU to stop normal program execution and perform some service related to the event.
– Examples of interrupts include I/O completion, timer time-out, illegal opcodes, arithmetic overflow, divide-by-0, etc.
• Functions of Interrupts
– Coordinating I/O activities and preventing CPU from being tied up – Providing a graceful way to exit from errors
– Reminding the CPU to perform routine tasks
• Interrupt maskability
– Interrupts that can be ignored by the CPU are called maskable interrupts.
– A maskable interrupt must be enabled before it can interrupt the CPU. – An interrupt is enabled by setting an enable flag.
Basics of Interrupts
(2 of 4)
• Interrupt priority
– Allow multiple pending interrupt requests
– Resolve the order of service for multiple pending interrupts
• Interrupt service
– CPU executes a program called the interrupt service routine. – A complete interrupt service cycle includes
• Saving the program counter value in the stack
• Saving the CPU status (including the CPU status register and some other registers) in the stack
• Identifying the cause of interrupt
• Resolving the starting address of the corresponding interrupt service routine • Executing the interrupt service routine
Basics of Interrupts
(3 of 4)
• Interrupt vector
– Starting address of the interrupt service routine
• Interrupt vector table
– A table where all interrupt vectors are stored
• Methods of determining interrupt vectors
– Predefined locations (Microchip PIC18, 8051 variants)
– Fetching the vector from a predefined memory location (HCS12)
– Executing an interrupt acknowledge cycle to fetch a vector number in order to locate the interrupt vector (68000 and x86 families)
• Steps of interrupt programming
Basics of Interrupts
(4 of 4)
• The overhead of interrupts
– Saving and restoring of CPU status and other
registers. (HCS12 needs to save all CPU registers).
– Execution time of instructions of the interrupt service
routine.
Reset
• The initial values of some CPU registers, flip-flops, and
the control registers in I/O interface chips must be
established in order for the computer to function
properly.
• The reset mechanism establishes these initial conditions
for the computer system.
• There are at least two types of resets: power-on reset
and manual reset.
– The power-on reset establishes the initial values of registers and
I/O control registers.
– The manual reset without power-down allows the computer to
get out of most error conditions if hardware doesn’t fail.
PSEL5 PSEL4 PSEL3 PSEL2 PSEL1
PSEL7 PSEL6 0
7 6 5 4 3 2 1 0
Figure 6.1 Highest priority I interrupt register
$001F
HCS12 Exceptions
(1 of 2)
• Maskable interrupts: including IRQ pin and all peripheral function
interrupts
• Nonmaskable interrupts: including XIRQ pin, SWI interrupt, and
unimplemented opcode trap
• Resets: including the power-on reset, reset pin manual reset, the
COP reset (computer operate properly), and clock monitor reset
• Maskable Interrupts
– Different HCS12 members implement different number and types of peripheral functions, and hence may have different number of maskable interrupts.
– One of the maskable interrupts can be raised to the highest priority
HCS12 Exceptions
(2 of 2)
• The priority and vector addresses of all HCS12 exceptions are listed
in Table 6.1.
• To raise a maskable interrupt source to the highest priority, write the
low byte of the vector address of this interrupt to the HPRIO register.
• In Table 6.1, exceptions that have higher vector addresses are at
higher priorities.
• Not all the exceptions are available in all HCS12 members.
• IRQ Pin Interrupt
– The only external maskable interrupt for the HCS12. – IRQ interrupt can be edge-triggered or level-triggered.
– IRQ interrupt has a local enable mask in the IRQCR register.
0 0 0 0 0
IRQE IRQEN 0
7 6 5 4 3 2 1 0
0 1 0 0 0 0 0 0
reset:
Figure 6.2 Interrupt control register (IRQCR) IRQE -- IRQ edge sensitive only bit
IRQE can be written once in normal mode. In special modes, it can be written any time, but the first write is ignored.
1 = IRQ pin responds only to falling edge 0 = IRQ pin responds to low level.
IRQEN -- IRQ enable bit
IRQEN bit can be written any time in all modes. The IRQ pin has an internal pullup.
• Pros
– Multiple interrupt sources can be tied to this pin.
• Cons
– Need to make sure that the IRQ signal has become
inactive before the IRQ service routine is complete if
there is only one interrupt request pending.
• Pros:
– No need to control the duration of the IRQ pulse.
• Cons:
– Not suitable for noisy environment because every
falling edge caused by noise will be recognized as an
interrupt.
When Does the MCU
Recognize Interrupt Requests?
• The MCU recognizes the interrupt request when
it completes the execution of the current
instruction unless the current instruction is a
fuzzy logic instruction. For fuzzy logic
.
Figure 6.3 Stack order on entry to interrupts return address
[Y] [X] [B] [A]
[CCR] SP
SP+1 SP+2 SP+3 SP+5 SP+7
• The stack order on entry of an interrupt
– The HCS12 saves all CPU registers on an interrupt. – The order of saving CPU registers is shown below.
• The RTI instruction
– RTI is used to terminate interrupt service routines. – RTI will restore CPU registers from the stack.
Nonmaskable Interrupts
• XIRQ pin interrupt
– XIRQ interrupt is disabled during a system reset and upon entering the service routine of another XIRQ interrupt.
– After minimal system initialization, software can clear the X bit of the CCR register to enable the (using the andcc #$BF instruction) XIRQ interrupt. Software cannot reset the X bit once it has been set.
– When a nonmaskable interrupt is recognized, both the X and I bits are set after CPU registers are saved.
– The execution of an RTI instruction at the end of the XIRQ service routine will restore the X and I bits to the pre-interrupt request state.
• Unimplemented opcode trap
– There are 202 unimplemented opcodes on page 2 (16-bit opcode). – These unimplemented opcodes share the same vector $FFF8:$FFF9.
• Software interrupt instruction (SWI)
– Execution of the SWI instruction causes an interrupt without an interrupt request signal.
– The SWI instruction is commonly used in the debug monitor to implement breakpoints and to transfer control from a user program to the debug monitor. – A breakpoint in a user program is a memory location where we want program
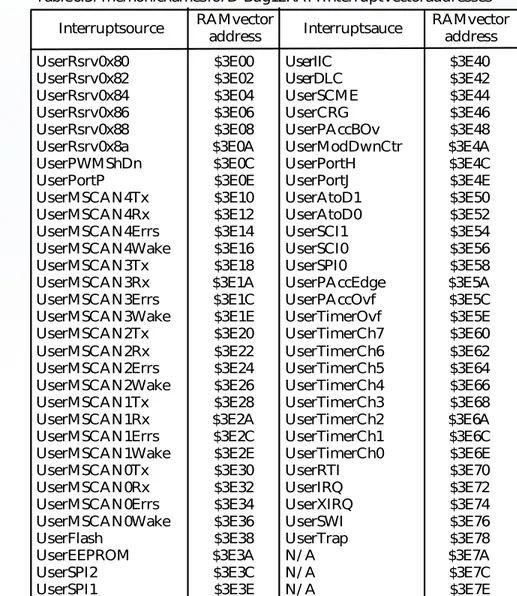
Interrupts in D-Bug12 EVB Mode
• On-chip flash memory locations are not available for user
to store interrupt vectors.
• D-Bug12 monitor provides SRAM-based interrupt vector
table.
• The SRAM-based table (in Table 6.3) starts at $3E00 and
has 64 entries.
• The interrupt SCI0 has been used by the monitor and is
not available to the user.
• Mnemonic names are defined for users to store their
interrupt vectors in the table. Both the
hcs12.inc
and the
Table 6.3 Mnemonic names for D-Bug12 RAM Interrupt vector addresses
Interrupt source RAM vectoraddress Interrupt sauce RAM vectoraddress
Setting Up the Interrupt Vector
(1 of 2)
• The label (or name) of the IRQ interrupt service routine is
IRQISR
.
•
In assembly language
movw #IRQISR,UserIRQ
; store the vector at the
designated address
•
In C language
– Add the following statement at the beginning of the program: #define INTERRUPT __attribute__((interrupt))
– Include the header file vectors12.h using the statement:
#include “c:\egnu091\include\vectors12.h”
– Declare the prototype of the service routine as follows: #define INTERRUPT IRQISR(void);
Setting Up the Interrupt Vector
(2 of 2)
• Example 6.1
– The IRQ pin of the HCS12DP256 is connected to a 1-Hz digital
waveform and port B is connected to eight LEDs. Write a
program to configure port B for output and enable the IRQ
interrupt and also write the service routine for the IRQ interrupt.
– The service routine for the IRQ interrupt simply increments a
counter and outputs it to port B.
• Solution
#include "c:\miniide\hcs12.inc" org $1000
count ds.b 1 ; reserve one byte for count org $1500
lds #$1500 ; set up the stack pointer
movw #IRQISR,UserIRQ ; set up interrupt vector in SRAM clr count
movb #$FF,DDRB ; configure port B for output
bset DDRJ,$02 ; configure PJ1 pin for output (required in Dragon12)
bclr PTJ,$02 ; enable LEDs to light (required in Dragon12) movb count,PTB ; display the count value on LEDs
movb #$C0,IRQCR ; enable IRQ pin interrupt, select edge-triggering
cli ; "
forever nop
bra forever ; wait for IRQ pin interrupt ; **************************************************************************** ; This is the IRQ service routine.
; **************************************************************************** IRQISR inc count ; increment count
#include "c:\egnu091\include\hcs12.h" #include "c:\egnu091\include\vectors12.h"
#define INTERRUPT __attribute__((interrupt)) void INTERRUPT IRQISR(void);
unsigned char cnt; int main(void)
{
UserIRQ = (unsigned short)&IRQISR; DDRB = 0xFF;
cnt = 0;
DDRJ |= BIT1; /* configure PJ1 pin for output */ PTJ &= ~BIT1; /* enable LEDs to light */
IRQCR = 0xC0; /* enable IRQ interrupt on falling edge */ asm("cli"); /* enable interrupt globally */
while(1); /* wait for interrupt forever */ return 0;
}
void INTERRUPT IRQISR(void) {
Clock and Reset Generation Block (CRG)
(1 of 2)
• CRG generates the clock signals required by the HCS12 instruction
execution and all peripheral operations.
• The clock signal has the form of square waveform.
• Crystal oscillators are often used to generate clock signals.
• The crystal oscillator output is sinusoidal wave and must be squared up
before it can be used.
• The HCS12 has an internal circuit to do this square up operation.
• The CRG block also has a PLL circuit that can multiply the frequency of the
incoming clock signal.
• The block diagram is shown in Figure 6.4.
• The CRG can also accept oscillator output (square waveform) directly.
• The XCLKS signal must be tied low (for MC9S12DP256B) in order to use
VREG
Clock and Reset Control
Reset generator
Clock quality checker
COP RTI
Registers
System Reset
Bus clock
Core clock
Oscillator clock Power on
reset
RESET
CM fail
Clock monitor
OSC
PLL
OSCCLK
PLLCLK
XCLKS EXTAL
XTAL
XFC VDDPLL
VSSPLL
CRG
Figure 6.4 Block diagram of CRG
Choice of Clock Source
(1 of 2)
• The user can choose between using the external crystal or oscillator to
produce the clock signal.
• The external crystal is connected between the EXTAL and XTAL pins and
needs an on-chip oscillator circuitry to square it up.
• The external clock source provided by the oscillator is connected to the
EXTAL pin and has a 2.5V peak-to-peak magnitude for D family.
• The XCLKS signal must be grounded to select the external clock signal.
• The output from the OSC module in Figure 6.4 may bypass or go through
the PLL circuit.
• The PLL circuit has the capability to multiply incoming signal frequency and
stabilize its output signal frequency.
• Either the OSCCLK or the PLLCLK can be chosen as the SYSCLK which
will be divided by 2 to derive the bus clock to control the instruction execution and peripheral operation.
Phase lock loop
1
0
1
0
Clock monitor Oscillator OSCCLK
PLLCLK
PLLSEL or SCM
SCM
clock phase generator 2
WAIT, STOP
wait(RTIWAI), stop(PSTP,PRE) RTI enable
RTI
COP
wait (COPWAI), stop(PSTP, PCE)
COP enable
wait (SYSWAI), stop
stop (PSTP)
wait (CWAI,SYSWAI) stop
Core clock
Bus clock
oscillator clock
oscillator clock ( pseudo stop mode)
extal
xtal
gating condition
= clock gate
SYSCLK
(SYNR + 1)
PLLCLK = 2 OSCCLK --- (6.1) (REFDV + 1)
reset:
0 0 SYN5 SYN4 SYN3 SYN2 SYN1 SYN0
0 0 0 0 0 0 0 0
Figure 6.8 The CRG synthesizer register (SYNR)
0 1
2 3
4 5
6 7
0 0 0 0 REFDV3 REFDV2 REFDV1 REFDV0
7 6 5 4 3 2 1 0
Phase Locked Loop (PLL)
(1 of 5)
Selection of
PLL for clock
generation is
controlled by the CRGSEL register.
reset:
PLLSEL PSTP SYSWAI ROAWAI PLLWAI CWAI RTIWAI COPWAI
0 0 0 0 0 0 0 0
7 6 5 4 3 2 1 0
PLLSEL: PLL select bit
0 = system clocks are derived from OSCCLK 1 = system clocks are derived from PLLCLK PSTP: pseudo stop bit
This bit controls the functionality of the oscillator during the stop mode. 0 = oscillator is disabled in stop mode
1 = oscillator continues to run in stop mode (pseudo mode). The oscillator amplitude is reduced.
SYSWAI: system clocks stop in wait mode bit
0 = The system clocks continue to run in wait mode. 1 = The system clocks stop.
ROAWAI: Reduced oscillator amplitude in wait mode bit 0 = Normal oscillator amplitude in wait mode
1 = Reduced oscillator amplitude in wait mode PLLWAI: PLL stops in wait mode bit
0 = PLL keeps running in wait mode
1 = PLL stops in wait mode. The CRG will clear the PLLSEL bit before entering wait mode. The PLLON bit remains set during wait mode but the PLL is powered down.
CWAI: core stops in wait mode bit
0 = Core clock keeps running in wait mode. 1 = Core clock stops in wait mode.
RTIWAI: RTI stops in wait mode bit 0 = RTI keeps running in wait mode.
1 = RTI stops and initializes the RTI dividers whenever the part goes into wait mode. COPWAI: COP stops in wait mode bit
0 = COP keeps running in wait mode
1 = COP stops and initializes the COP dividers whenever the part goes into wait mode.
PLL circuit is also controlled by the
PLLCTL
register.
reset:
CME PLLON AUTO ACQ 0 PRE PCE SCME
0 0 0 0 0 0 0 0
7 6 5 4 3 2 1 0
CME: clock monitor enable bit 0 = clock monitor is disabled
1 = clock monitor is enabled. Slow or stopped clocks will cause a clock monitor reset sequence or self clock mode
PLLON: phase lock loop on bit 0 = PLL is turned off
1 = PLL is turned on. If AUTO bit is set, the PLL will lock automatically. AUTO: automatic bandwidth control bit
0 = automatic mode control is disabled and the PLL is under software control, using ACQ bit.
1 = high bandwidth filter is selected
ACQ: acquisition bit (if AUTO bit = 1, this bit has no effect) 0 = low bandwidth filter is selected
1 = high bandwidth filter is selected PRE: RTI enable during pseudo stop bit
0 = RTI stops running during pseudo stop mode 1 = RTI continues running during pseudo stop mode PCE: COP enable during pseudo stop bit
0 = COP stops running during pseudo stop mode 1 = COP continues running during pseudo stop mode. SCME: self clock mode enable bit
0 = detection of crystal clock failure causes clock monitor reset
movb #2,SYNR ; set SYNR to 2
movb #0,REFDV ; set REFDV to 0
movb #$80,CRGSEL ; enable PLL, keep SYSCLK running in wait mode,
; keep RTI, COP, PLL & core running in wait mode
movb #$60,PLLCTL ; disable clock monitor, enable PLL, set automatic
; bandwidth control, disable RTI & COP in pseudo stop
• In addition, the XCLKS pin must be grounded to select oscillator as clock source.
Phase Locked Loop (PLL)
(4 of 5)
• Example 6.2 There is a system that derives its bus clock from the PLL
circuit and an external clock of 8 MHz is selected. The desired bus clock is 24 MHz. Write an instruction sequence to perform the desired configuration.
• Solution
– The SYSCLK frequency is 48 MHz. – The frequency of OSCCLK is 8 MHz.
– 48 MHz = 2 8 MHz [SYNR + 1] /[REFDV + 1]
movb #5,SYNR ; set SYNR to 5
movb #0,REFDV ; set REFDV to 0
movb #$80,CRGSEL ; enable PLL, keep SYSCLK running in wait mode,
; keep RTI, COP, PLL & core running in wait mode
movb #$60,PLLCTL ; disable clock monitor, enable PLL, set automatic
; bandwidth control, disable RTI & COP in pseudo stop
• The XCLKS pin must be pulled to high to select external crystal to generate clock signals.
Phase Locked Loop (PLL)
(5 of 5)
•
Example 6.3
There is a system that uses a 4 MHz crystal oscillator to
derive a 24 MHz bus clock. Write an instruction sequence to perform
the required configuration.
•
Solution
The OSCCLK and PLLCLK frequencies are 4 MHz and 48
MHz, respectively.
– 48 MHz = 2 4 MHz [SYNR + 1] /[REFDV + 1]
• The clock monitor is based on an RC circuit.
• If no OSCCLK edges are detected within the RC
time delay, the clock monitor may reset the MCU
if the CME bit in the PLLCTL register is set to 1.
• The SCME bit of the PLLCTL register must be
cleared to 0 for clock monitor to work.
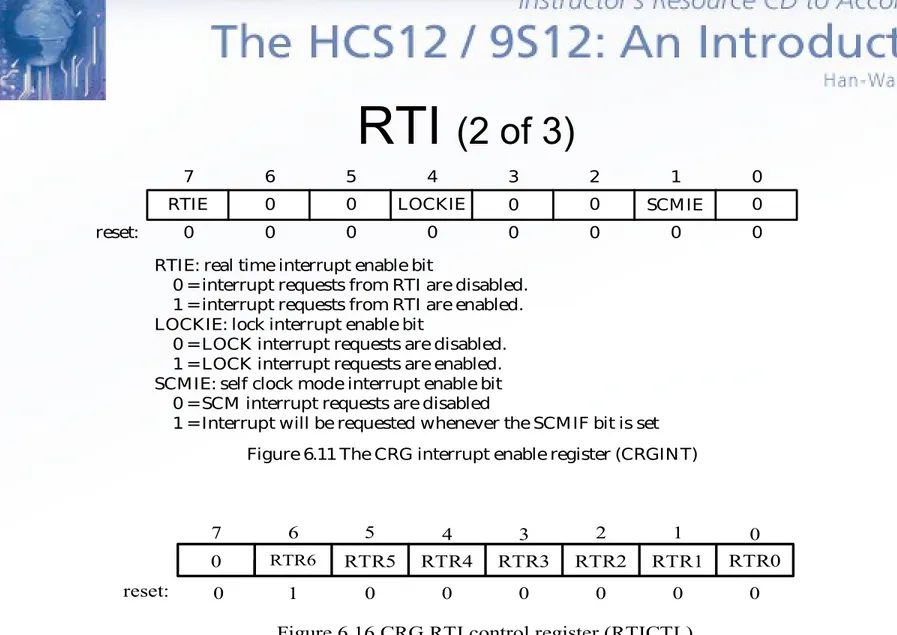
Real-time interrupt (RTI)
(1 of 3)
• Main function is to generate periodic interrupt to
the MCU.
• The RTI is enabled by the CRGINT register
(shown in Figure 6.11).
• The interrupt interval of RTI is selected by the
RTICTL register (shown in Figure 6.16).
reset:
RTIE 0 0 LOCKIE 0 0 SCMIE 0
0 0 0 0 0 0 0 0
Figure 6.11 The CRG interrupt enable register (CRGINT)
7 6 5 4 3 2 1 0
RTIE: real time interrupt enable bit
0 = interrupt requests from RTI are disabled. 1 = interrupt requests from RTI are enabled. LOCKIE: lock interrupt enable bit
0 = LOCK interrupt requests are disabled. 1 = LOCK interrupt requests are enabled. SCMIE: self clock mode interrupt enable bit 0 = SCM interrupt requests are disabled
1 = Interrupt will be requested whenever the SCMIF bit is set
RTR5 RTR4 RTR3 RTR2 RTR1
0 RTR6 RTR0
7 6 5 4 3 2 1 0
0 1 0 0 0 0 0 0
reset:
Figure 6.16 CRG RTI control register (RTICTL)
Table 6.4 RTI interrupt period (in units of OSCCLK cycle) RTR[3:0] RTR[6:4]
000
(off) (200110) (201011) (201112) (210013) (210114) (211015) (211116)
0000 (1) 0001(2) 0010 (3) 0011 (4) 0100 (5) 0101 (6) 0110 (7) 0111 (8) 1000 (9) 1001 (10) 1010 (11) 1011 (12) 1100 (13) 1101 (14) 1110 (15)
off* off* off* off* off* off* off* off* off* off* off* off* off* off* off* 210
2210
3210
4210
5210
6210
7210
8210
9210
10210
11210
12210
13210
14210
15210
211
2211
3211
4211
5211
6211
7211
8211
9211
10211
11211
12211
13211
14211
15211
212
2212
3212
4212
5212
6212
7212
8212
9212
10212
11212
12212
13212
14212
15212
213
2213
3213
4213
5213
6213
7213
8213
9213
10213
11213
12213
13213
14213
15213
214
2214
3214
4214
5214
6214
7214
8214
9214
10214
11214
12214
13214
14214
15214
215
2215
3215
4215
5215
6215
7215
8215
9215
10215
11215
12215
13215
14215
15215
216
2216
3216
4216
5216
6216
7216
8216
9216
10216
11216
12216
13216
14216
15216
Computer Operating Properly (COP) Circuit
(1 of 2)
• Allow the user to determine whether the application software
operates properly.
• The COP is a timer circuit that will time out if it is not rearmed within
a preset time limit.
• The COP will reset the MCU when it times out and the user would
know if the software operated properly.
• The application software would include an instruction sequence to
prevent the COP from timing out.
• To prevent the COP from timing out, write $55 and then $AA into the
ARMCOP register.
• The time out period of the COP is controlled by the COPCTL
register.
0 0 0 CR2 CR1
WCOP RSBCK CR0
7 6 5 4 3 2 1 0
0 1 0 0 0 0 0 0
reset:
WCOP: windowed COP mode bit
When set, a write to the ARMCOP register must occur in the last 25% of the selected period. A write during the first 75% of the selected period will reset the MCU.
0 = normal COP operation 1 = windowed COP operation
RSBCK: COP and RTI stop in active BDM mode bit
0 = allows the COP and RTI to keep running in active BDM mode
1 = stops the COP and RTI whenever the HCS12 is in active BDM mode CR2:CR0: COP watchdog time rate select (number of OSCCLK cycles) 000: COP disabled
001: 214
010: 216
011: 218
100: 220
101: 222
110: 223 24
Computer Operating Properly (COP) Circuit
Lower Power Mode
• It is desirable to minimize power consumption when the MCU is not
busy performing useful operations.
• The execution of the WAI instruction places the HCS12 MCU in wait
mode and reduces
power consumption significantly.
• In
wait mode
, CPU clocks are stopped, but clock signals for
peripheral functions continue to run.
• The CPU leaves the wait mode when one of more of the following
events occur:
– Maskable interrupts that are not disabled. – Nonmaskable interrupts
– Resets
Stop Mode
• Stop mode is entered when the MCU executes
the STOP instruction. When this instruction is
executed, the MCU enters standby mode.
– The STOP instruction has no effect if the S flag of the
CCR register is 1.
• In stop mode, all clock signals in the MCU are
stopped.
Resets
• There are four sources of reset:
– Power-on (POR) and low-voltage detector (LVD) reset
– RESET pin
– COP reset
Power-on Reset
• The HCS12 has a circuit to assert reset when
VDD supply to the MCU has reached a certain
level.
• The CRG module performs a quality check on
the incoming clock signal as soon as a power-on
reset is triggered.
IN
GND
RESET
To RESET of HCS12 VDD
MC34064
VDD
4.7
1
3
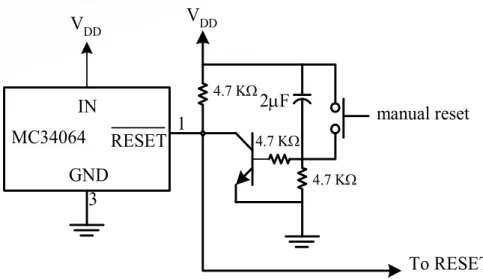
Figure 6.18 A typical external reset circuit
manual reset
4.7
4.7 2F
External Reset
• The RESET pin allows the user to
reset the MCU.
• The MCU can differentiate the
external and internal reset signals.
• When the power supply drops to a
certain level, it may corrupt the EEPROM.
– It is desirable to have a circuit that can detect this situation and
asserts a reset to the MCU.
• The Motorola MC34064 is a chip
that can detect low voltage on power supply and reset the CPU.
• An external reset circuit
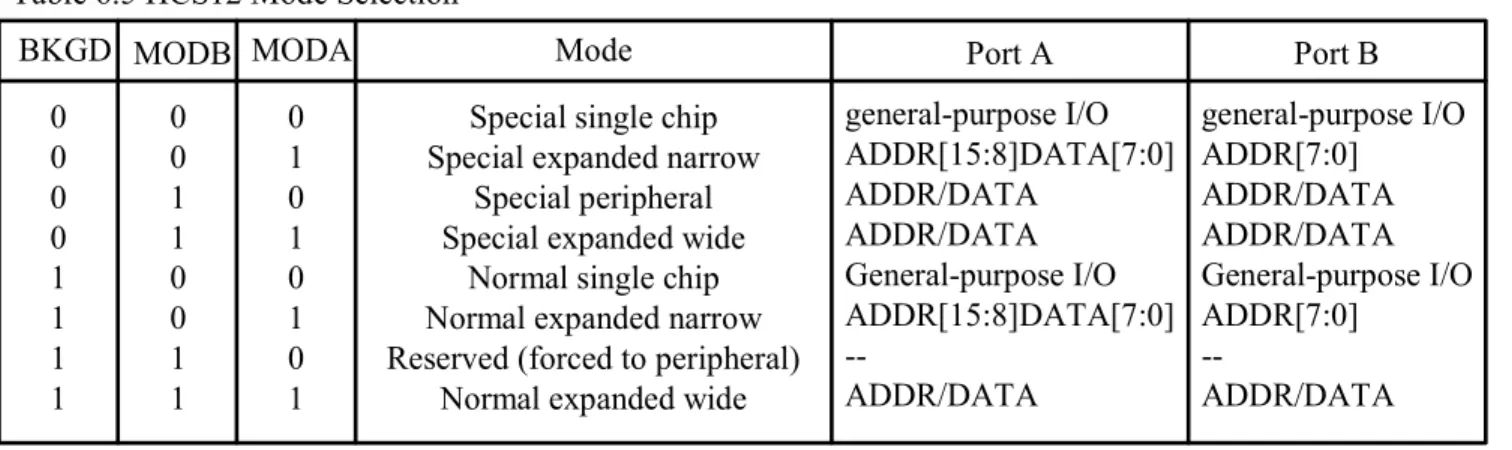
Table 6.5 HCS12 Mode Selection
BKGD MODB MODA Mode
0 0 0 0 1 1 1 1
0 0 1 1 0 0 1 1
0 1 0 1 0 1 0 1
Special single chip Special expanded narrow
Special peripheral Special expanded wide
Normal single chip Normal expanded narrow Reserved (forced to peripheral)
Normal expanded wide
Port A
general-purpose I/O ADDR[15:8]DATA[7:0] ADDR/DATA
ADDR/DATA General-purpose I/O ADDR[15:8]DATA[7:0]
--ADDR/DATA
Port B
general-purpose I/O ADDR[7:0]
ADDR/DATA ADDR/DATA General-purpose I/O ADDR[7:0]
--ADDR/DATA
HCS12 Operation Modes
• The HCS12 can operate in eight different operation modes (shown in Table
6.5).
• The states of MODC, MODB, and MODA pins are latched to determine the
MCU operation modes.
• Expanded modes allow the user to access external memory where single
chip modes do not.
• In expanded modes, Port A and B become the time-multiplexed address

![Figure 6.3 Stack order on entry to interruptsreturn address[Y][X][B][A][CCR]SP SP+1SP+2SP+3SP+5SP+7](https://thumb-us.123doks.com/thumbv2/123dok_us/986878.612554/14.1080.417.692.271.497/figure-stack-order-entry-interruptsreturn-address-ccr-sp.webp)


![Table 6.4 RTI interrupt period (in units of OSCCLK cycle) RTR[3:0] RTR[6:4] 000 (off) (2 00110 ) (2 01011 ) (2 01112 ) (2 10013 ) (2 10114 ) (2 11015 ) (2 11116 ) 0000 (1) 0001(2) 0010 (3) 0011 (4) 0100 (5) 0101 (6) 0110 (7) 0111 (8) 1000 (9) 1001](https://thumb-us.123doks.com/thumbv2/123dok_us/986878.612554/34.1080.131.972.162.744/table-rti-interrupt-period-units-oscclk-cycle-rtr.webp)