Strojniški vestnik - Journal o f Mechanical Engineering 54(2008)12, 866-873 UDC 681.527.34
Paper received: 21.01.2008 Paper accepted: 25.09.2008
Effects of the Variation of Torque Motor Parameters on
Servovalve Performance
D u š a n G ordić*- M ilu n B a b ič - N e b o jš a J o v ič ič - D o b rič a M ilo v a n o v ič U n iv e rs ity o f K ra g u je v a c , F a c u lty o f M e c h a n ic a l E n g in e e rin g in K ra g u je v a c , S erb ia
An electrohydraulic servovalve is an essential item o f flu id po w er servomechanism where fa st response, high pow er output and working fid elity are necessary. B ased on detailed and experimentally verified mathematical model o f two-stage spool position mechanical feed b a ck electrohydraulic servovalves sensitivity analysis has been performed. The effects o f variation o f fe w torque motor electromagnetic parameters (air-gap length (thickness) at null, residual magnetic flu x density (magnetic inductivity) o f perm anent magnet and number o f turns o f each coil) on dynamic perform ance o f B.31.210.12.1000.U2V P P T servovalve have been studied. Obtained results are in accordance with servovalve engineering design practice.
© 2 0 0 8 Jo u rn a l o f M e c h a n ic a l E n g in e e rin g . A ll rig h ts re se rv e d .
Keywords: electrohidraulics, servovalves, torque motors, sensitivity analysis
0 IN T R O D U C T IO N
T w o -sta g e s p o o l p o s itio n fe e d b a c k e le c tro h y d ra u lic s e rv o v a lv e s w ith th e to rq u e m o to r as an e le c tro m e c h a n ic a l c o n v e rte r a n d a fla p p e r-n o z z le v a lv e as th e firs t sta g e o f h y d ra u lic a m p lific a tio n are th e m o s t u tilis e d se rv o v a lv e s in e le c tro h y d ra u lic co n tro l sy ste m s fo r th e la s t fo rty y ea rs. In sp ite o f th e ir re la tiv e ly lo n g p e rio d o f a p p lic a tio n , all p h e n o m e n a a s s o c ia te d w ith th e ir o p e ra tio n a re n o t c o m p le te ly q u a n tita tiv e ly an d q u a lita tiv e ly e x p la in e d . T h is is d u e to fac ts th a t a re la tiv e ly c o m p le x m a th e m a tic a l a p p a ra tu s, c o m in g fro m fu n d a m e n ta l la w s o f e le c tro m a g n e tism , flu id m e c h a n ic s a n d g e n e ra l m e c h a n ic s , is n e e d e d fo r d e s c rib in g th e ir o p e ra tio n . B e sid e , th e s e m a th e m a tic a l e x p re ssio n s in c lu d e m a n y p a ra m e te rs th a t are v e ry d iffic u lt to p re c is e ly q u an tify .
In th is p a p e r a u th o rs stu d y th e in flu e n c e o f to rq u e m o to r e le c tro m a g n e tic p a ra m e te rs o n se rv o v a lv e b e h a v io u r. M a n y a u th o rs g a v e c o n trib u tio n s to th e e x p la n a tio n o f e le c tro m a g n e tic n a tu re o f se rv o v a lv e to rq u e m o to rs. S till M e rritt [1] e x p la in e d in d e ta il th e e ffe c ts o f so m e n o n -lin e a ritie s o n th e se rv o v a lv e b e h a v io u r in c lu d in g to rq u e m o to r n o n -lin e a ritie s (m a g n e tic h y s te re s is a n d sa tu ra tio n ). In th e p a p e r [2], A ra fa a n d R iz k m a d e a s p e c ia l re v ie w on to rq u e c a u s e d b y e le c tro m a g n e tic fo rc e s. A n o n lin e a r m a th e m a tic a l m o d e l b a s e d o n p h y s ic a l q u a n titie s w a s d e v e lo p e d in [3]. T h is m o d e l in c lu d e s n o n - lin e a r re la tio n s fo r th e to rq u e m o to r
d y n a m ic s . F ro m th e e x p e rim e n ta l d a ta a n d F E A a n a ly sis p e rfo rm e d in [4], F u s s e ll e t al. s ta te that m a g n e tic flu x le a k a g e m u s t b e c o n s id e re d in the lu m p e d m o d e l f o r to rq u e p re d ic tio n s . In [5] and [6], U ra ta a n a ly s e d th e to rq u e m o to r d y n a m ic s in d e ta il a n d in flu e n c e o f u n e q u a l a ir-g a p len g th th ic k n e s s in n u ll in se rv o v a lv e to rq u e m o to rs.
P l R 2
F ig . 1. Two-stage spool position feed b a ck electrohydraidic servovalve (mechanical feedback) 1 torque motor, 2 f i r s t stage, 3
-second stage, 4 -fe e d b a c k spring
1 T H E O R E T IC A L M O D E L
D e ta ile d th e o re tic a l m o d e l s h o u ld b e u sed in o rd e r to in v e s tig a te th e in flu e n c e o f to rq u e m o to r e le c tro -m a g n e tic p a ra m e te rs o n se rv o v a lv e b e h a v io u r. It s h o u ld in c lu d e all p h y sic al p h e n o m e n a a n d to rq u e m o to r p a ra m e te rs th a t are
ex p e cted to b e o f in flu e n c e o n b e h a v io u r o f an aly sed s e rv o v a lv e s .
1.1 T o r q u e
Motor
W h e n c u rre n t is m a d e to flo w th ro u g h to rq u e m o to r c o ils, a rm a tu re e n d s b e c o m e polarised . A to rq u e is th u s p ro d u c e d o n th e arm atu re w h ic h s ta rts to m o v e . It is c o m m o n in p ractice, as it w a s p ro v e d in [7], to u s e th e lin e a r ex p re ssio n to c a lc u la te th is to rq u e:
Te = Kj. + K m6 , (1) w here v a lu e s fo r K, a n d Km are o b ta in e d ex p e rim en tally .
T a k in g in to a c c o u n t e x p re s s io n s fo r elec tro m a g n e tic fo rc e s in to r q u e m o to r a ir g ap s, w here e x p re ssio n s fo r m a g n e tic flu x e s in a ir g a p s (o b tain ed u s in g th e firs t a n d th e se c o n d K irch h o ffs' la w s f o r m a g n e tic c irc u its ) are im p lem e n te d to rq u e p ro d u c e d o n a rm a tu re c a n b e ca lc u lated u s in g (in th e c a se o f p a ra lle l co il co n n ectio n ):
T = - ■Mo' Ap *p0
M m+ N — i
V
JM m — + N (l + kr)i xPo
“ 2
1 -r - e
+ k r
U»J
(
2
)
w here p e rm a n e n t m a g n e t m a g n e to m o tiv e fo rc e is:
U . 1
(3)
L in e a ris in g E q . 2 a b o u t th e n u ll p o s itio n
(i = 0 a n d 0 = 0) o n e c a n w rite :
Nr^i0AvM m
* 2A i + K ) ’ (4)
r ' • V ^ X m ^ o ( W
(5)
M a g n e tic re lu c ta n c e c o n s ta n t kr c o n s id e rs in flu e n ces o f p e rm a n e n t m a g n e t re lu c ta n c e , th e n o n -u n ifo rm ity o f a m a g n e tic fie ld th ro u g h th e p e rm a n e n t m a g n e t v o lu m e , r e d u c tio n o f th e m ag n etic fie ld in th e p e r m a n e n t m a g n e t d u e to in flu e n ces o f e n d p o le s a n d th e le a k a g e flu x in a ir gaps, as it w a s d e s c rib e d in [5]. F o llo w in g
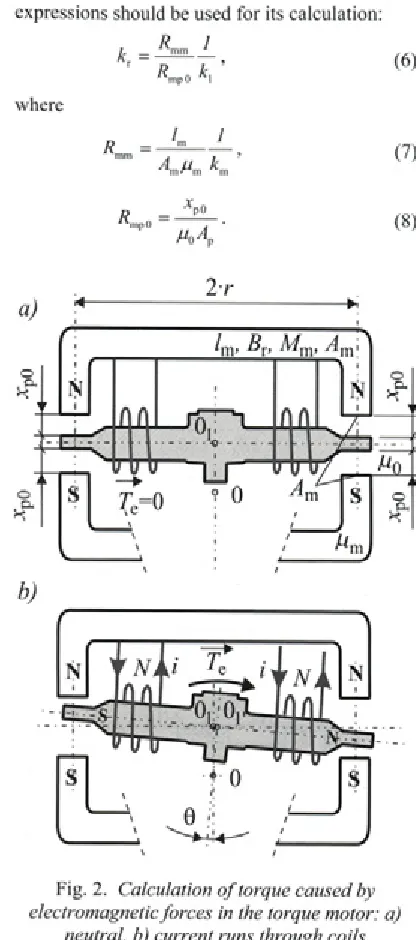
e x p re s s io n s s h o u ld b e u s e d fo r its c a lc u la tio n :
F ig . 2. Calculation o f torque caused by electromagnetic fo rces in the torque motor: a)
neutral, b) current runs through coils
1.2 Other Parts of the Servovalve
O n ly fin a l e q u a tio n s o f th e m o d e l are p r e s e n te d in th is p a p e r fo r th e re fe re n c e . P re s e n te d e q u a tio n s a re re la te d to tw o -s ta g e e le c tro h y d ra u lic s e rv o v a lv e s w ith m e c h a n ic a l fe e d b a c k . D e ta ile d e x p la n a tio n o f fo rm u la e c a n b e fo u n d in [8] A N D [9],
Tc = j J + k j + T t +Fhla +T( ,
w h ere:
k = " 77 •
(9)
(10)
T h e to rq u e c a u s e d b y fle x u re tu b e d e fo rm a tio n ca n b e w ritte n as:
T{ = ^ - 6 .
‘ K
F lo w fo rc e o n th e fla p p e r is g iv e n by:
P ={P ~ P r ) ^ f + 8^
K^(x0- x f ( p - p d) - K { ^ + 4 { P r - P i ) ]
w h e re fla p p e r tip d is p la c e m e n t is:
x = 0la - F h
f p p h * f l j *t V3 Bn 12 BtJ
(
11
)(12)
(1 3 )
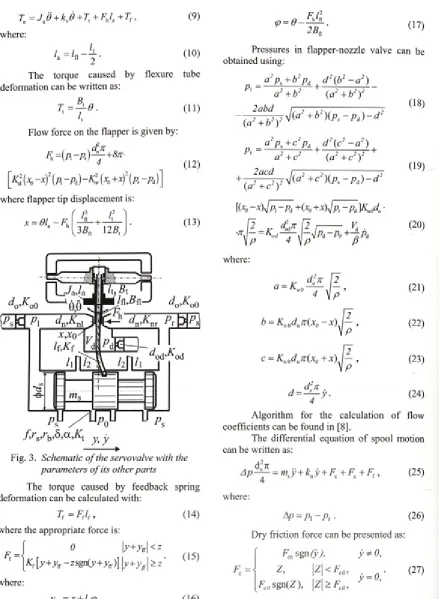
F ig . 3. Schematic o f the servovalve with the param eters o f its other parts
T h e to r q u e c a u s e d b y fe e d b a c k sp rin g d e fo rm a tio n c a n b e c a lc u la te d w ith :
T = F I
J f 1 f ‘f > w h e re th e a p p ro p ria te fo rc e is:
f
o
\y+ys \< z
Kf [y+ yB - z s g n ( y + y ff)] \y+ yff\ > z '
* 1
w h ere:
Fir = x + lftp,
F I 2
(p = Q - t J Ò L
2B„
P re s s u re s in fla p p e r-n o z z le v a lv e ca n b e o b ta in e d u sin g :
P\ = a P s + b Pi d {b2 - a )
a 2 + b 2 (a 2 + b 2)2 2a b d
(a 2 + b 2y~\l(a2 + b 2)(p s — p d) - d 2
(18)
Pr a ~Ps+ c 'P i d (c ~ a ) a 2 + c 2 (a2 + c 2)2 2 acd
Kx o ~ x ) J P i ~ P i + (x o + x )yjp I - P i ¥ ^ A ■
U „ d f n [ I
I ^ is I ^ I " d *
=Ko“~ i ~ \ \ y P i -P» +~dpi
iIp 4 \ p ß
(19)
(
20
)w h e re :
a = K d i n 2 4 \ p
b = K n0 d nX(x0 - x ) — ,
V
P
c = K n0d nn (x 0 + x ) \—
I P
, d ] n . d = —— y .
4
(
21
)(22)
(23)
(24)
A lg o r ith m f o r th e c a lc u la tio n o f flow c o e ffic ie n ts c a n b e fo u n d in [8],
T h e d iffe re n tia l e q u a tio n o f sp o o l m o tio n c a n b e w ritte n as:
A p ^ = msy + k J + Fc + Fa + F( , (25)
w h e re :
(1 4 ) Ap = p {- p T. (26)
D ry f ric tio n fo rc e c a n b e p r e s e n te d as:
(1 5 )
^ „s g n
(y),
y * 0 ,
(1 6 )
Fc
=-w h e re :
Z ,
|z|
< Fc0,Fc0
sgn(Z),
|z|
> Fc0,■ n ■ (27)
Z = A p ~ ~ ~ ~ F a - F { . (2 8 )
In th e c a se o f th e n u ll lap c o n d itio n f o r all fo u r sy m m e tric a l a n d m a tc h e d s p o o l o rific e s o f n o -lo ad s e rv o v a lv e , th e fo llo w in g e x p re s s io n can be u se d fo r th e a x ial c o m p o n e n t o f th e flo w fo rce:
K 2
F a = 2 —r f c o s a ( p s + p 0) +
(2 9 )
+(l, - l , ) K t J 2 p ( p s - p 0) f y
w h ere th e re a l v a lu e o f sp o o l v a lv e o p e n in g is:
y i = ^ {S + rs +rh)2 +(\y\ + rs +rb)2 - ( r 8 + r b ) . (3 0 )
N u m e ric a l d a ta fro m D o n g a n d U e n o are u se d fo r th e c a lc u la tio n o f j e t a n g le , c o n tra c tio n co e ffic ie n t a n d flo w c o e ffic ie n t [8],
T h e v o lu m e tric flo w th ro u g h th e se rv o v a lv e c a n b e m a th e m a tic a lly f o rm u la te d as:
ö s v= (K’J y . J -p
2 Ps -Po
2
-Q ) s g n ( y) . (3 1 )w h ere th e in te rn a l le a k a g e flo w c a n b e c a lc u la te d
from :
w h en | y | < ^ j ö i :
■ d =
Ps - P()
(3 2 -a )w h en • ö i ^ H < T t i :
an d w h e n |y| > y ü :
w here
____________
05p
___________
Kl f ( ^ + r , +rfj + (rs +rh)2 - r s - r b)2
„ _ 23
{pvf2
3 /2 c-5/2 5
W =
r l s
12rj f S■3 ’
(3 2 -b )
(3 2 -c )
(3 3 )
(3 4 )
(3 5 )
T,i =
0 .0 7 5 ^ 2 ,
n d %v
2 E X P E R IM E N T A L V E R IF IC A T IO N (3 6 )
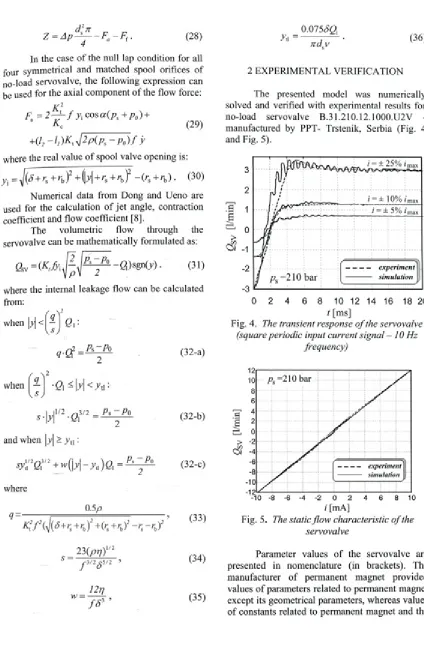
T h e p re s e n te d m o d e l w a s n u m e ric a lly s o lv e d a n d v e rifie d w ith e x p e rim e n ta l re su lts for n o -lo a d se rv o v a lv e B .3 1 .2 1 0 .1 2 .1 0 0 0 .U 2 V -m a n u fa c tu re d b y P P T - T rs te n ik , S e rb ia (F ig . 4 a n d F ig . 5).
t [m s]
F ig . 4. The transient response o f the servovalve (square periodic input current signal - 10 Hz
frequency)
F ig . 5. The static flo w characteristic o f the servovalve
to rq u e m o to r w e re c a lc u la te d a c c o rd in g to th e p ro c e d u re d e s c rib e d in [5], T h e fric tio n c o e ffic ie n ts w e re e s tim a te d to m a tc h th e a p p ro p ria te e x p e rim e n ta l tra n sie n t re sp o n se s. V a lu e s fo r o th e r p a ra m e te rs w e re d e te rm in e d w ith a d ire c t m e a s u re m e n t on th e d is a sse m b le d se rv o v a lv e. T h e e q u ilib riu m d is ta n c e fro m th e fla p p e r tip to n o z z le s is an e x c e p tio n fro m th is ru le. It w a s c a lc u la te d a c c o rd in g to th e a s se m b la g e re q u ire m e n t, w h ic h d e m a n d s th a t p re s s u re s in b o th n o z z le s sh o u ld b e 70 b a r w h e n th e s u p p ly p re s s u re is 140 b a r a n d w h e n th e fla p p e r is in th e z e ro p o sitio n .
S tatic a n d d y n a m ic e x p e rim e n ta l a n a ly se s o f th e se rv o v a lv e w e re p e rfo rm e d o n th e sta n d a rd se rv o v a lv e te s tin g eq u ip m e n t, p ro p e rty o f P P T (sta tic - M O O G - P lo tte rs ta n d D 0 4 6 -0 3 0 , d y n a m ic - M O O G - F re q u e n z g a n g - P ru e fs ta n d D 0 4 6 0 3 2 ).
T h e m o d e l s a tis fa c to ry a g re e s w ith th e e x p e rim e n t a n d it ca n b e u s e d fo r th e se n sitiv ity an a ly sis.
3 S E N S IT IV IT Y A N A L Y S IS
T o rq u e m o to r p a ra m e te rs re la te to its e le c tro m a g n e tic n a tu re are le n g th o f e a c h a ir g ap a t n u ll x po, p e rm a n e n t m a g n e t c ro ss s e c tio n a l are a
A m, to rq u e m o to r g ap a re a A p, m a g n e tic flu x d e n s ity o f p e rm a n e n t m a g n e t B r m, p e rm a n e n t m a g n e t le n g th lm, n u m b e r o f tu rn s o f e a c h co il N,
d ista n c e fro m a rm a tu re p iv o t to th e c e n tre o f p e rm a n e n t m a g n e t p o le fac e r a n d p e rm a n e n t m a g n e t p e rm e a b ility
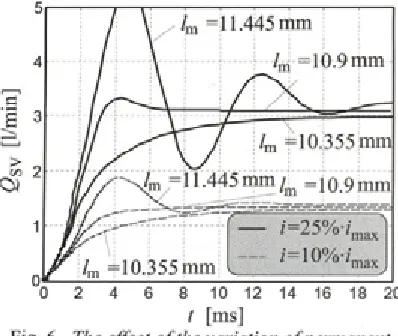
F ig . 6. The effect o f the variation ofperm anent magnet length on servovalve perform ance
In o rd e r to a n a ly s e th e in flu e n c e o f to rq u e m o to r p a ra m e te rs on s e rv o v a lv e c h a ra c te ristic s, th e tra n s ie n t re s p o n s e s fo r ste p in p u t c u rre n t s ig n a l (fro m 0 to ste a d y re g im e s d e te rm in e d w ith tw o in p u t c u rre n t sig n a ls i - 10% a n d 2 5 % o f the ra te d zmax) w e re n u m e ric a lly m o d e lle d . T h re e d iffe re n t v a lu e s fo r th e a n a ly s e d p a ra m e te rs w ere ta k e n in n u m e ric a l m o d e llin g : v a lu e o f the a n a ly s e d se rv o v a lv e , o n e h ig h e r a n d o n e sm a lle r v a lu e . R e s u lts o f th e m o d e llin g a re s h o w n in Fig. 6 to 12.
F ig . 7. The effect o f the variation o f distance fro m armature pivot to the centre o f permanent
magnet p o le fa c e on servovalve perform ance
F ig . 8. The effect o f the variation o f air-gap length at null on servovalve perform ance
It c a n b e n o tic e d o n d ia g ra m s th a t the in c re a s e (d e c re a s e ) o f x p0 g e n e ra te s th e sam e e ffe c ts as th e d e c re a s e (in c re a s e ) o f other a n a ly s e d p a ra m e te rs .
length p a ra m e te rs (lm, r, x p0) h a v e g re a te r influ en ce on tra n s ie n t re s p o n s e th e n a re a s (Am, j ). V a ria tio n o f A m h a s b ig g e r in flu e n c e th e n v ariatio n o f A p.
It is e s p e c ia lly im p o rta n t to a n a ly s e th e effects o f v a ria tio n o f xp0, Br m a n d N on serv o v alv e p e rfo rm a n c e . T h e s e th re e p a ra m e te rs can b e e a sily m o d ifie d w h e n a d e s ig n e r w a n ts to change th e c h a ra c te ris tic s o f an e x istin g servovalve.
Fig. 9. The effect o f the variation ofperm anent magnet cross sectional area at zero on servovalve
perform ance
Fig. 10. The effect o f the variation o f torque motor gap area on servovalve perform ance
T h e c h a n g e o f a ir-g a p le n g th a t n u ll x p0 h as the g re a te st in flu e n c e on th e q u a lity o f tra n s ie n t resp o n se a n d ste a d y v a lu e s o f th e s e rv o v a lv e flo w (Fig 8.). S m all re d u c tio n o f xp0 v a lu e (b y 2 % ) induce th e d e c re a s e o f ris e tim e a n d e x is te n c e (fo r
/=10%-z'max) i.e. th e in c re a s e o f o v e rs h o o t (fo r
i= 2 5 % -/max) a n d fin a lly h ig h e r th e sta tio n a ry v alu e o f se rv o v a lv e flo w . I f th e xp0 h as h ig h e r v a lu e th e n th e tra n s ie n t re s p o n s e b e c o m e s m o re slu g g is h a n d sta tio n a ry v a lu e o f se rv o v a lv e flo w is b e in g re d u c e d .
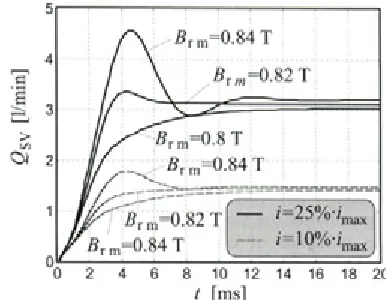
W ith sm a lle r c h a n g e s fo r th e sam e p e rc e n ta g e v a ria tio n o f p a ra m e te r v a lu e , sim ila r tre n d ca n b e n o tic e d in Fig. 11 w h e re th e v a lu e o f re s id u a l m a g n e tic flu x d e n s ity is ch a n g ed .
c S
t [m s]
F ig . 11. The effect o f the variation o f residual magnetic flu x density on servovalve performance
T h e c h a n g e o f n u m b e r o f tu rn s o f ea ch coil
N d o e s n o t h a v e in flu e n c e on th e q u a lity o f tra n s ie n t re sp o n se . It o n ly h a s sm all in flu e n c e on th e ste a d y v a lu e o f se rv o v a lv e flow .
F ig. 12. The effect o f the variation o f number o f turns o f each coil on servovalve performance
3 C O N C L U S IO N
e x is tin g o r d e s ig n a n e w se rv o v a lv e th e y m u s t m o d ify so m e p ro p e rtie s o n p h y sic a l o b je c t a n d th e n e x p e rim e n ta lly v e rify th e re s u lts o f th is a c tio n . T h e m o d e l p r e s e n te d in th e p a p e r p rim a rily g iv e s a u se fu l d e s ig n to o l, sin c e all its p a ra m e te rs are p h y sic a l q u a n titie s. W h e n se rv o v a lv e d e s ig n e rs h a v e su c h d e v e lo p e d m o d e l th a t in c lu d e s p h e n o m e n a a n d p a ra m e te rs o f in flu e n c e a n d ca n p re d ic t th e ir p e rfo rm a n c e in a w id e ra n g e o f e x p e c te d re g im e s, th e y c a n sim p ly re d e sig n e x istin g se rv o v a lv e s w ith o u t p h y sic a l m o d ific a tio n . T h e y ca n n u m e ric a lly m o d e l all p o ssib le situ a tio n s a n d c h o o s e re su lts th a t are a p p ro p ria te fo r th e ir n ee d s.
U s in g th e d e ta ile d se rv o v a lv e m a th e m a tic a l m o d e l a u th o rs a n a ly s e d th e in flu e n c e o f to rq u e m o to r e le c tro m a g n e tic p a ra m e te rs. T h e a n a ly sis s h o w e d th a t th e b ig g e s t in flu e n c e o n se rv o v a lv e d y n a m ic c h a ra c te ristic s h a s v a ria tio n o f a ir-g a p le n g th a t ze ro , a lth o u g h th e in flu e n c e o f o th e r p a ra m e te rs c a n n o t be n e g le c te d . S im ila r a n a ly sis c a n b e p e rfo rm e d fo r o th e r se rv o v a lv e p a ra m e te rs.
4 N O M E N C L A T U R E
Am p e rm a n e n t m a g n e t c ro ss s e c tio n a l a re a (1 5 4 .6 8 - 1 0 6)
[m 2]
to rq u e m o to r g ap a re a ( 9 - 1 0 6) [m 2]
Ba fla p p e r b e n d in g r ig id ity (0 .0 2 5 6 ) [N m 2]
B t fle x u re tu b e r ig id ity (0 .0 3 0 2 ) [N m 2]
Brm m a g n e tic flu x d e n s ity o f p e rm a n e n t m a g n e t
[T]
dn n o z z le d ia m e te r (0.28-10"3) [m ]
d0 le ft (rig h t) c o n s ta n t o rifice d ia m e te r ( 0 .1 8 - 1 0 3)
[m ]
dod d ra in c o n s ta n t o rific e d ia m e te r (0.4-1 O'3)
[m ]
ds s p o o l d ia m e te r ( 4 .6 2 -10"3) [m ]
f sp o o l v a lv e a re a g ra d ie n t (4 .8 -1 0 '3)
[m ]
Fo a x ia l c o m p o n e n t o f flo w fo rc e o n sp o o l
[N]
F c d ry fric tio n fo rc e o n s p o o l [N]
Fco in itia l d ry fric tio n fo rc e o n sp o o l (3 .2 -1 0 '3)
[N]
F cn n o m in a l d r y fric tio n fo rc e o n sp o o l (2.2-1 O'3)
[N]
Ff fo rc e c a u s e d b y m u tu a l a c tio n o f fe e d b a c k s p rin g a n d sp o o l
[N]
Fh flo w fo rc e o n fla p p e r [N]
i to ta l c u rre n t [A]
*max ra te in p u t c u rre n t (1 0 -1 0"3) [A] ■4 a rm a tu re a s s e m b ly m o m e n t o f
in e rtia w ith th e r e s p e c t o f ro ta tio n a l c e n tre ( 1 .6 8 - 1 0 7)
[k g m 2]
K o c o n tra c tio n c o e ffic ie n t o f sp o o l o rific e
[-]
K f fe e d b a c k sp rin g stiffn e s s (1 9 6 2 ) [N /m ] K to rq u e m o to r g a in [N m /A ]
[-]
k\ c o n s ta n t o f le a k a g e flu x in air g a p (0 .2 7 )
km c o n s ta n t c a u s e d b y th e n o n u n ifo rm ity o f m a g n e tic fie ld in p e rm a n e n t m a g n e t (2 .4 2 )
[-]
K m to rq u e m o to r e le c tro m a g n e tic sp rin g c o n s ta n t
[N m ]
kn s p o o l v is c o u s fric tio n c o e ffic ie n t (3 8 0 0 )
[kg/s]
K n\ flo w c o e ffic ie n t o f th e left fla p p e r-n o z z le re s tric tio n
[-]
K m flo w c o e ffic ie n t o f th e rig h t fla p p e r-n o z z le re s tric tio n
[-]
K a0 flo w c o e ffic ie n t o f th e fla p p e r- n o z z le r e s tric tio n s a t z e ro
[-]
K o d flo w c o e ffic ie n t o f th e d ra in c o n s ta n t o rific e
[-]
K 0o flo w c o e ffic ie n t o f th e le ft/rig h t c o n s ta n t o rific e a n ze ro
[-]
kr m a g n e tic r e lu c ta n c e c o n s ta n t (0 .4 6 5 )
[-]
K flo w c o e ffic ie n t o f sp o o l o rific e [-]
kv a rm a tu re a s s e m b ly v isc o u s fric tio n c o e ffic ie n t (4-1 O'4)
[N m s]
h a x ia l le n g th b e tw e e n s u p p ly a n d a c tu a to r p o rts (5 .4 -1 0 '3)
[m ]
h a x ia l le n g th b e tw e e n re s e rv o ir a n d a c tu a to r p o rts ( 9 .2 -10"3)
[m ]
4 d is ta n c e fro m th e n o z z le ax is o f sy m m e try to th e ax is o f r o ta tio n o f a rm a tu re a s s e m b ly (8.75-1 O'3)
[m ]
k fe e d b a c k sp rin g le n g th (1 3 .3 -1 0 3) [m]
h f la p p e r le n g th (13-1 O'3) [m ] 4 i p e rm a n e n t m a g n e t le n g th
( 1 0 .9 - 1 0 3)
[m ]
4 fle x u re tu b e le n g th ( 8 .5 -10"3) [m ]
M m p e rm a n e n t m a g n e t m a g n e to m o tiv e fo rc e
[A]
m s sp o o l m a s s (3 .1 -1 0"3) [kg] N n u m b e r o f tu rn s o f e a c h coil
(3 6 2 5 )
[-]
P o a tm o s p h e ric (re s e rv o ir) p re s s u re (1 0 5)
[Pa]
p\
Pr
le ft n o z z le p re s s u re [Pa] rig h t n o z z le p re s s u re [Pa]
r l
Ps s u p p ly p re s s u re (2 1 0 -105) [Pa]
r d ista n c e fro m a rm a tu re p iv o t to
th e c e n tre o f p e rm a n e n t m a g n e t p o le fa c e ( 1 4 .5 - 10'3)
[m ]
A ra d iu s o f b u s h in g c o n tro l ed g e (10-1 O'6)
[m]
Rmm p e rm a n e n t m a g n e t re lu c ta n c e [ H '1] Rmp0 re lu c ta n c e o f e a c h a ir g ap at th e
null
[ H '1]
r s ra d iu s o f sp o o l c o n tro l ed g e (10-1 O'6)
[m ]
Te to rq u e c a u s e d b y e le c tro m a g n e tic
fo rc es
[N m ]
Tf
to rq u e c a u s e d b y fe e d b a c k sp rin gd e fo rm a tio n
[N m ]
r , to rq u e c a u s e d b y fle x u re tu b e d e fo rm a tio n
[N m ]
vd d rain c o m p a rtm e n t v o lu m e (8.2-1 O'6)
[m 3]
a le a k a g e flo w th ro u g h sp o o l o rifice s
[m 3/s]
Qsv se rv o v a lv e v o lu m e tric flo w [m 3/s]
X fla p p e r tip d is p la c e m e n t [m ]
x0 d ista n c e fro m fla p p e r tip to ea ch n o z z le at n u ll ( 3 8 .5 - 10"6)
[m ]
Xn d ista n c e fro m f la p p e r tip to
n o z z le
[m ]
XP0 le n g th o f e a c h a ir g ap a t null
(0 .4 5 -1 0 '3)
[m ]
y sp o o l d is p la c e m e n t [m ] T f fe e d b a c k sp rin g e n d d e fle c tio n [m ]
T fif A ctive fe e d b a c k s p rin g b a ll d is p la c e m e n t i f th e re is n o sp o o l
[m ]
T i sp o o l o rific e o p e n in g [m ] T t i la rg e tra n s itio n le n g th [m ] z h a l f th e fe e d b a c k s p rin g b a ll
c le a ra n c e (2-1 O'6)
[m ]
a j e t a n g le in sp o o l o rific e [°]
ß flu id c o m p re s s ib ility (1 .9 -1 0 9) [Pa]
S sp o o l in b u s h in g r a d ia l c le a ra n c e (4-1 O'6)
[m ]
7 flu id d y n a m ic v is c o s ity (0 .0 1 2 ) [Pa-s]
<P fla p p e r fre e e n d in c lin a tio n [rad] Ab m a g n e tic p e rm e a b ility o f v a c u u m [H /m ] Am p e rm a n e n t m a g n e t p e rm e a b ility
(5 )
[H /m ]
V flu id k in e m a tic v is c o s ity (14-10 '6) [m 2/s]
e
a rm a tu re d e fle c tio n [rad]p flu id d e n s ity (8 7 1 ) [k g /m 3]
5 R E F E R E N C E S
[1] M e rritt, H. (1 9 6 7 ) H y d ra u lic C o n tro l S y ste m s, Jo h n W ile y & S o n s, N ew Y ork. [2] A ra fa , H. A . a n d R izk , M . (1 9 8 7 )
Id e n tific a tio n a n d M o d e llin g o f S o m e E le c tro h y d ra u lic S e rv o -V a lv e N o n - L in e a ritie s. P ro c e e d in g s o f th e In stitu tio n o f M e c h a n ic a l E n g in e e rs, P art C: M e c h a n ic a l E n g i-n e e rin g S c ie n c e , voi. 2 0 1 , no. 2, pp. 137-144.
[3] W a n g , D ., D o lid , R ., D o n ath , M ., A lb rig h t, J. (1 9 9 5 ) D e v e lo p m e n t a n d V e rific a tio n o f a T w o -S ta g e F lo w C o n tro l S e rv o v a lv e M o d el, A S M E T h e F lu id P o w e r a n d S y stem s T e c h n o lo g y D iv isio n (P u b lic a tio n ), F P S T , v o i. 2, p p . 1 2 1-129.
[4] F u sse ll, B ., D arw in , J., P rin a S. (1 9 9 9 ) S e rv o v a lv e T o rq u e M o to r A n a ly s is, E le c tric a l In su la tio n C o n fe re n c e /E le c tric a l M a n u fa c tu rin g & C o il W in d in g E x p o , 1999. [5] U ra ta , E. (2 0 0 0 ) S tu d y o f M a g n e tic C irc u its
fo r S e rv o v a lv e T o rq u e M o to rs, B ath W o rk s h o p o n P o w e r T ra n s m is s io n a n d C o n tro l (P T M C '0 0 ), B ath , U K , pp. 2 6 9 -2 8 2 . [6] U ra ta , E. (2 0 0 7 ) In flu e n c e o f u n e q u a l air-g ap
th ic k n e s s in se rv o v a lv e to rq u e m o to rs, P ro c e e d in g s o f th e I M E C H E P a rt C Jo u rn a l o f M e c h a n ic a l E n g in e e rin g S c ie n c e , V o lu m e 2 2 1 , N u m b e r 1 1 ,2 0 0 7 , pp. 1 2 8 7 -1 2 9 7 ( 11). [7] G o rd ić , D ., Š u šte ršič , V ., Jo v ič ič , N ., B ab ič,
M . (2 0 0 4 ) A n a ly s is o f se rv o v a lv e to rq u e m o to r b e h a v io u r, P ro c e e d in g s o f th e 29. N S S H IP N E F 2 0 0 4 , V m ja č k a B a n ja , S erb ia, M ay,
19 .-2 1 ., 2 0 0 4 , pp. 18 7 -1 9 2 . (in S erb ian ). [8] G o rd ić , D ., B ab ič, M ., Jo v ič ič , N . (2 0 0 4 )
T h e m o d e llin g o f a sp o o l p o s itio n fe e d b a c k se rv o v a lv e , In te rn a tio n a l Jo u rn a l o f F lu id P o w e r, v o i. 5, no. 1, M a rc h 20 0 4 .