R E S E A R C H
Open Access
Variable KM-like algorithms for fixed point
problems and split feasibility problems
Abdul Latif
1*, Daya R Sahu
2and Qamrul H Ansari
3,4*Correspondence: [email protected] 1Department of Mathematics, King Abdulaziz University, Jeddah, Saudi Arabia
Full list of author information is available at the end of the article
Abstract
The convergence analysis of a variable KM-like method for approximating common fixed points of a possibly infinitely countable family of nonexpansive mappings in a Hilbert space is proposed and proved to be strongly convergent to a common fixed point of a family of nonexpansive mappings. Our variable KM-like technique is applied to solve the split feasibility problem and the multiple-sets split feasibility problem. Especially, the minimum norm solutions of the split feasibility problem and the multiple-sets split feasibility problem are derived. Our results can be viewed as an improvement and refinement of the previously known results.
MSC: 47H10; 65J20; 65J22; 65J25
Keywords: split feasibility problems; fixed point problems; regularized algorithms; convergence analysis of algorithms
1 Introduction
Problems of image reconstruction from projections can be represented by a system of linear equations
Ax=b. (.)
In practice, the system (.) is often inconsistent, and one usually seeks a point which min-imizesx∈Rnby some predetermined optimization criterion. The problem is frequently ill-posed and there may be more than one optimal solution. The standard approach to dealing with that problem is via regularization. The well-known convex feasibility prob-lem is to find a pointx∗satisfying the following:
to find a pointx∈ m
i= Ci,
wherem≥ is an integer, and eachCi is a nonempty closed convex subset of a Hilbert
spaceH. A special case of the convex feasibility problem is the split feasibility problem given by:
LetC,Qbe nonempty closed convex subsets of Hilbert spacesHandH, respectively,
and letA:H→Hbe a bounded linear operator. Thesplit feasibility problem(SFP) is
to find a pointx∈Csuch thatAx∈Q. (.)
The SFP is said to be consistent if (.) has a solution. It is easy to see that SFP (.) is consistent if and only if the following fixed point problem has a solution:
findx∈Csuch thatx=PCI–γA∗(I–PQ)Ax, (.)
wherePCandPQare the projections ontoCandQ, respectively, andA∗is the adjoint ofA. LetLdenote the spectral radius ofA∗A. It is well known that ifγ ∈(, /L), the operator
T=PC(I–γA∗(I–PQ)A) in the operator equation (.) is nonexpansive [].
It has been extensively studied during the last decade because of its applications in mod-eling inverse problems which arise in phase retrievals and in medical image reconstruc-tion. It has also been applied to modeling intensity-modulated radiation therapy; see, for example [–] and the references therein.
Several iterative methods have been proposed and analyzed to solve the SFP (.); see, for example [, , , –] and the references therein. Byrne [] introduced the CQ algorithm
xn+=Txn, n∈N, (.)
and proved that the sequence{xn}generated by the CQ algorithm (.) converges weakly to a solution of SFP (.), whereT=PC(I–γA∗(I–PQ)A) and <γ < /L.
In view of the fixed point formulation (.) of the SFP (.), Xu [] and Yang [] applied the following perturbed Krasnosel’ski˘ı-Mann CQ algorithm to solve the SFP (.):
xn+= ( –αn)xn+αnTnxn, n∈N. (.)
Here{Tn}is a sequence of operators defined by
Tn=PCn
I–γA∗(I–PQn)A
, n∈N,
where {Cn} and{Qn} are sequences of nonempty closed convex subsets inH andH,
respectively, which obey the following assumption: (C) ∞n=αndρ(Cn,C) <∞and
∞
n=αndρ(Qn,Q) <∞for eachρ> , wheredρis the
ρ-distance betweenQnandQ(see Section .).
It is not very easy to verify condition (C) for eachρ> . Thus, the condition (C) is quite restrictive even for weak convergence of the sequence{xn}defined by (.). One of our objectives is to relax the condition (C).
Many practical problems can be formulated as afixed point problem(FPP): finding an elementxsuch that
x=Tx, (.)
whereTis a nonexpansive self-mapping defined on a closed convex subsetCof a Hilbert spaceH. The solution set of FPP (.) is denoted byF(T). It is well known that ifF(T)=∅, thenF(T) is closed and convex. The fixed point problem (.) is ill-posed (it may fail to have a solution, nor uniqueness of solution) in general. Regularization by contractions can removed such illness. We replace the nonexpansive mappingTby a family of contractions
function. The regularized problem of fixed point forTis the fixed point problem forTtf.
The mappingTtf has a unique fixed point, namely,xt∈C. Therefore,xtis the solution of the fixed point problem
xt=tfxt+ ( –t)Txt. (.)
We now discretize the regularization (.) to define an explicit iterative algorithm:
xn+=tnfxn+ ( –tn)Txn, n∈N. (.)
The iterative algorithm (.) is due to Moudafi [], by generalizing Browder’s and Halpern’s methods, who introduced viscosity approximation methods. Suzuki [] estab-lished a strong convergence theorem by using Halpern’s method to averaged mapping
Tλ=λI+ ( –λ)T,λ∈(, ) for nonexpansive mappingsTin certain Banach spaces.
Taka-hashi [] proved a strong convergence theorem of the following iterative algorithm for countable families of nonexpansive mappings in certain Banach spaces:
xn+=tnfxn+ ( –tn)Tnxn, n∈N. (.)
Recently, Yao and Xu [] introduced and studied strong convergence of the following modified methods:
xn+=PC
tnfxn+ ( –tn)Txn
, n∈N, (.)
wheref :C→His a fixed non-self contraction and{tn}is a sequence in (, ) satisfying
the conditions:
(S) limn→∞tn= and∞n=tn=∞,
(S) either∞n=|tn+–tn|<∞ortn+/tn→asn→ ∞.
One can easily see that (.) is a regularized iterative algorithm.
Motivated by [, , ], we study the following more general non-regularized algorithm, calledvariable KM-like algorithmwhich generates a sequence{xn}according to the
recur-sive formula:
⎧ ⎪ ⎨ ⎪ ⎩
x∈C,
yn=αnfnxn+ ( –αn)Tnxn,
xn+= ( –βn)xn+βnProjC[yn] for alln∈N,
where {αn} and {βn} are sequences in (, ), {Tn} is a sequence of nonexpansive
self-mappings ofCand{fn}is a sequence of (not necessarily contraction) mappings fromC
intoH.
As special cases, we obtain algorithms which converge strongly to the minimum norm solutions of the split feasibility problem and the multiple-sets split feasibility problem. Our results are new and interesting in the following contexts:
(i) Our algorithm (.) is not regularized by contractions.
(ii) fnis not necessarily contraction. In the existing literature, anchoring functionf is a fixed contraction mapping [, –] or strongly pseudo-contraction mapping [].
(iii) In the convergence analysis of (.) for fixed point problem (.), the assumption (S) is not required.
(iv) A fixedρ> for a (C)-like condition is adopted. 2 Preliminaries
LetCbe a nonempty subset of a Hilbert spaceH. Throughout the paper, we denote by
Br[x] the closed ball defined byBr[x] ={y∈C: y–x ≤r}. LetT,T:C→H be two
mappings. We denote byB(C) the collection of all bounded subsets ofC. Thedeviation
betweenTandTonB∈B(C) [], denoted byDB(T,T), is defined by
DB(T,T) =sup
Tx–Tx :x∈B
.
LetT:C→Hbe a mapping. ThenTis said to be aκ-contractionif there existsκ∈[, ) such that Tx–Ty ≤κ x–y for allx,y∈C. Furthermore, it is callednonexpansiveif
Tx–Ty ≤ x–y for allx,y∈C.
Let{fn}be a sequence of mappings fromCintoH. Following [–], we say{fn}is a sequence ofnearly contractionmappings with sequence{(kn,an)}if there exist a sequence
{kn}in [, ) and a sequence{an}in [,∞) withan→ such that
fnx–fny ≤kn x–y +an for allx,y∈Candn∈N.
One can observe that a sequence of contraction mappings is essentially a sequence of nearly contraction mappings.
We now construct a sequence of nearly contractions.
Example . LetH=RandC= [, ]. Let{fn}be a sequence of mappingsfn:C→H
defined by
fn(x) =
x
n+, if ≤x≤ ;
n+, if <x≤.
(.)
Setkn:=n+. We consider the following cases:
Case : Ifx,y∈[,], then
fnx–fny=kn(x–y) for alln∈N.
Case : Ifx,y∈(, ], then
Case : Ifx∈[,] andy∈(, ], then
|fnx–fny|= x
n+ –
n+
≤
n+ |x–y|+
n+ |y– | ≤kn|x–y|+
(n+ ), n∈N.
Therefore, for allx,y∈[, ], we have
|fnx–fny| ≤kn|x–y|+an for alln∈N,
wherean:=
(n+). Therefore,{fn}is a sequence of nearly contraction mappings with
se-quence{(kn,an)}.
LetCbe a nonempty closed convex subset of a Hilbert spaceH. We usePCto denote the (metric)projectionfromHontoC; namely, forx∈H,PC(x) is the unique point inC
with the property
x–PC(x)=inf
x–z :z∈C.
The following is a useful characterization of projections.
Lemma . Let C be a nonempty closed convex subset of a real Hilbert space H and let PC be the metric projection from H onto C.Given x∈H and z∈C.Then z=PC(x)if and only if
x–z,y–z ≤ for all y∈C.
Lemma .[, Corollary ..] Let C be a nonempty closed convex subset of H and T:
C→C a nonexpansive mapping.Then I –T is demiclosed at zero,that is,if {xn}is a sequence in C weakly converging to x and if{(I–T)xn}converges strongly to zero,then
(I–T)x= .
Lemma .[] Let{an}and{cn}be two sequences of nonnegative real numbers and let
{bn}be a sequence inRsatisfying the following condition:
an+≤( –αn)an+bn+cn for all n∈N,
where{αn}is a sequence in(, ].Assume that∞n=cn<∞.Then the following statements hold:
(a) Ifbn≤Kαnfor alln∈Nand for someK≥,then
an+≤δna+ ( –δn)K+ n
j=
cj for alln∈N,
whereδn= nj=( –αj)and hence{an}is bounded.
3 Convergence analysis of a variable KM-like algorithm First, we prove the following.
Proposition . Let C be a nonempty closed convex subset of a real Hilbert space H,T :
C→C a nonexpansive mapping with F(T)=∅and f :C→H aκ-contraction.Then there exists a unique point x∗∈C such that x∗=PF(T)f(x∗).
Proof Sincef :C→His aκ-contraction, it follows thatPF(T)f is aκ-contraction fromC
onto itself. Then there exists a unique pointx∗∈Csuch thatx∗=PF(T)f(x∗).
3.1 A variable KM-like algorithm
LetCbe a nonempty closed convex subset of a real Hilbert spaceH. Let{fn}be a sequence of nearly contractions fromCintoHsuch that{fn}converges pointwise tof and let{Tn}
be a sequence of nonexpansive self-mappings ofCwhich are viewed as perturbations. For computing a common fixed point of the sequence {Tn}of nonexpansive mappings, we propose the followingvariable KM-like algorithm:
⎧ ⎪ ⎨ ⎪ ⎩
x∈C,
yn=αnfnxn+ ( –αn)Tnxn,
xn+= ( –βn)xn+βnPC[yn] for alln∈N,
(.)
where{αn}and{βn}are sequences in [, ].
We investigate the asymptotic behavior of the sequence{xn}generated, from an arbi-traryx∈C, by the algorithm (.) to a common fixed point of the sequence{Tn}.
Theorem . Let C be a nonempty closed convex subset of a real Hilbert space H,T:C→ C be a nonexpansive mapping such that F(T)=∅,and let f :C→H be aκ-contraction withκ∈[, )such that PF(T)f(x∗) =x∗∈F(T).Let{fn}be a sequence of nearly contraction mappings from C into H with the sequence{(kn,an)}in[, )×[,∞)such that kn→κ,
and let{Tn}be a sequence of nonexpansive mappings from C into itself.For given x∈C, let{xn}be a sequence in C generated by(.),where{αn}is a sequence in(, ]and{βn}is a sequence in(, ).Assume that the following conditions are satisfied:
(C) limn→∞αn= and ∞
n=αn=∞,
(C) <lim infn→∞βn≤lim supn→∞βn< ,
(C) limn→∞fnx∗=fx∗,
(C) ∞n=( –αn) Tnx∗–x∗ <∞. Define
R:=maxx–x∗,K∗
+ ∞
n=
( –αn)Tnx∗–x∗ and
K∗:=sup n∈N
fnx∗–x∗ +an
–kn .
(.)
Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗].
(C) limn→∞ Tnvn–Tvn = for all{vn}inBR[x∗],
then{xn}converges strongly tox∗.
Proof (a) Setzn:=PC[yn]. Observe that
zn–x∗=PC[yn] –PC
x∗
≤yn–x∗
≤αnfnxn–x∗+ ( –αn)Tnxn–x∗
≤αnfnxn–fnx∗+fnx∗–x∗+ ( –αn)Tnxn–Tnx∗+Tnx∗–x∗
≤αn
knxn–x∗+fnx∗–x∗+an+ ( –αn)xn–x∗+Tnx∗–x∗
= – ( –kn)αnxn–x∗+αnfnx∗–x∗+an
+ ( –αn)Tnx∗–x∗.
From (.), we have
xn+–x∗=βn
xn–x∗+βn
zn–x∗
≤( –βn)xn–x∗+βnzn–x∗
≤( –βn)xn–x∗+βn
– ( –kn)αnxn–x∗
+αnfnx∗–x∗+an
+ ( –αn)Tnx∗–x∗
= – ( –kn)αnβnxn–x∗+αnβnfnx∗–x∗+an
+ ( –αn)βnTnx∗–x∗
≤ – ( –kn)αnβnxn–x∗+ ( –kn)αnβnK∗+ ( –αn)Tnx∗–x∗
≤maxx–x∗,K∗
+
n
j=
( –αj)Tjx∗–x∗.
Since∞n=( –αn) Tnx∗–x∗ <∞, by Lemma ., we find that{ xn–x∗ }is bounded.
Moreover,
xn+–x∗≤maxx–x∗,K∗
+ ∞
n=
( –αn)Tnx∗–x∗=R, ∀n∈N.
Therefore,{xn}is well defined in the ballBR[x∗].
(b) Assume thatlimn→∞ Tnvn–Tvn = for all{vn}inBR[x∗]. Setγn:=x∗–fx∗,x∗–zn.
We now proceed with the following steps: Step :{fnxn}and{Tnxn}are bounded.
Without loss of generality, we may assume thatβ≤βnfor alln∈Nfor someβ> . From
(C), we have
∞
n=
( –αn)Tnx∗–x∗<∞,
which implies thatlimn→∞( –αn) Tnx∗–x∗ = . Sinceαn→, it follows that lim
n→∞Tnx
Since
Tnxn–x∗≤Tnxn–Tnx∗+Tnx∗–x∗ ≤xn–x∗+Tnx∗–Tx∗,
and{ Tnx∗–x∗ }converges to , we conclude that{Tnxn}is bounded. Moreover,
fnxn–x∗≤fnxn–fnx∗+fnx∗–x∗
≤knxn–x∗+fnx∗–x∗+an,
it follows that{fnxn}is bounded.
Step :limn→∞ xn–xn+ = .
Setun:=fnxn. We write
xn+= ( –βn)xn+βnzn.
Observe that
zn+–zn ≤ yn+–yn
=αn+un++ ( –αn+)Tn+xn+–
αnun+ ( –αn)Tnxn
=αn+un+–αnun+ ( –αn+)(Tn+xn+–Tn+xn)
+ ( –αn+)Tn+xn– ( –αn)Tnxn
= ( –αn+) xn+–xn + Tn+xn–Tnxn
+αn+
Tn+xn + un+
+αn
Tnxn + un
,
which gives
zn+–zn – xn+–xn ≤ Tn+xn–Tnxn +αn+
Tn+xn + un+
+αn
Tnxn + un .
As we have shown in Step ,{Tnxn}and{un}are bounded. Observe that
Tn+xn–x∗≤Tn+xn–Tn+x∗+Tn+x∗–x∗
≤xn–x∗+Tn+x∗–x∗
and
fn+xn–x∗≤fn+xn–fn+x∗+Tn+x∗–x∗
≤xn–x∗+fn+x∗–x∗+an.
Thus,{fn+xn}and{Tn+xn}are bounded. Hence,
lim sup n→∞
zn+–zn – xn+–xn
By [, Lemma .], we obtain
lim
n→∞ zn–xn = ,
which implies that
lim
n→∞ xn+–xn =nlim→∞βn zn–xn = . Step :limn→∞ xn–Txn = .
Note
yn–Tnxn =αnfnxn+ ( –αn)Tnxn–Tnxn=αn fnxn–Tnxn ,
and hence
xn–Txn ≤ xn–xn+ + xn+–Tnxn + Tnxn–Txn
≤ xn–xn+ + ( –βn) xn–Tnxn +βn zn–Tnxn + Tnxn–Txn
≤ xn–xn+ + ( –βn) xn–Tnxn +βn yn–Tnxn + Tnxn–Txn
≤ xn–xn+ + ( –βn) xn–Tnxn +αnβn fnxn–Tnxn + Tnxn–Txn
≤ xn–xn+ + ( –βn)
xn–Txn + Txn–Tnxn
+αnβn fnxn–Tnxn + Tnxn–Txn ,
which implies that
βn xn–Txn ≤ xn–xn+ +αnβn fnxn–Tnxn + Tnxn–Txn .
Noteαn→ and Tnxn–Txn →, we conclude thatlimn→∞ xn–Txn = .
Step :lim supn→∞γn≤.
Note that
zn–Tzn ≤ zn–xn + xn–Txn + Txn–Tzn
≤ zn–xn + xn–Txn → asn→ ∞.
We take a subsequence{zni}of{zn}such that
lim sup n→∞
fx∗–x∗,zn–x∗= lim n→∞
fx∗–x∗,zni–x
∗ and zn
iz∈C asi→ ∞.
Since{zn}is inCand zn–Tzn →, we conclude, from Lemma . thatz∈F(T). Since x∗=PF(T)f(x∗), we obtain from Lemma . that
lim sup
n→∞ γn=lim supn→∞
fx∗–x∗,zni–x∗=fx∗–x∗,z–x∗≤.
Since{ zn–x∗ }is bounded, there existsR> such that zn–x∗ ≤Rfor alln∈N.
Noting thatzn=PC[yn]. Hence, from (.), we have
zn–x∗ =zn–yn+yn–x∗,zn–x∗
≤yn–x∗,zn–x∗
=αn
fnxn–fnx∗+fnx∗–fx∗+fx∗–x∗
+ ( –αn)
Tnxn–Tnx∗+Tnx∗–x∗,zn–x∗
≤αnfnxn–fnx∗+fnx∗–fx∗
+ ( –αn)Tnxn–Tnx∗+Tnx∗–Tx∗zn–x∗
+αn
fx∗–x∗,zn–x∗
≤αn
knxn–x∗+fnx∗–fx∗+an
+ ( –αn)xn–x∗+Tnx∗–Tx∗zn–x∗+αnγn
= – ( –kn)αnxn–x∗zn–x∗+
αnfnx∗–fx∗+an
+ ( –αn)Tnx∗–Tx∗zn–x∗+αnγn
≤ – ( –kn)αn
xn–x
∗
+zn–x∗+αnfnx∗–fx∗+an
+ ( –αn)Tnx∗–Tx∗R+αnγn
≤ – ( –kn)αn
xn–x ∗
+ zn–x
∗
+αnfnx∗–fx∗+an
+ ( –αn)Tnx∗–Tx∗R+αnγn,
which implies that
zn–x∗≤ – ( –kn)αnxn–x∗+
αnfnx∗–fx∗+an
+ ( –αn)Tnx∗–Tx∗R+ αnγn.
From (.), we have
xn+–x∗
=( –βn)
xn–x∗+βn
zn–x∗
≤( –βn)xn–x∗
+βnzn–x∗
≤ – ( –kn)αnβnxn–x∗
+ αnβnfnx∗–fx∗+an
+ ( –αn)Tnx∗–Tx∗R+ αnβnγn.
Since limn→∞ fnx
∗–fx∗
–kn = and ∞
n=( –αn) Tnx∗ – Tx∗ < ∞, we conclude from
Lemma .(b) thatxn→x∗.
Remark . Theorem . has the following characterization for convergence analysis of (.):
(c) (C) is adopted for only forx∗∈F(T). In particular, the condition ‘∞n= Tnz–Tz <∞for allz∈F(T)’ is adopted in [, Theorem .].
Thus, Theorem . is more general by nature. Therefore, Theorem . significantly ex-tends and improves [, Theorem .] and [, Theorem .].
Theorem . remains true if condition (C) is replaced with the condition that the map-pings{Tn}andThave common fixed points. In fact, we have
Theorem . Let C be a nonempty closed convex subset of a real Hilbert space H, T :
C→C a nonexpansive mapping such that F(T)=∅,and f :C→H be aκ-contraction withκ∈[, )such that PF(T)f(x∗) =x∗∈F(T).Let{fn}be a sequence of nearly contraction mappings from C into H with sequence{(kn,an)}in[, )×[,∞)such that kn→κ.Let{Tn} be a sequence of nonexpansive mappings from C into itself such that F(T) =n∈NF(Tn). For given x∈C,let{xn}be a sequence in C generated by(.),where{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying(C), (C),and(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where R=max{ x–x∗ ,K∗}andK∗is given in(.).
(b) If the assumption(C)holds,then{xn}converges strongly tox∗.
We now prove strong convergence of the sequence{xn}generated by (.) under condi-tion (C).
Theorem . Let C be a nonempty closed convex subset of a real Hilbert space H,T:C→ C be a nonexpansive mapping such that F(T)=∅,and{Tn}be a sequence of nonexpansive mappings from C into itself. Let f :C→H be aκ-contraction withκ∈[, )such that PF(T)f(x∗) =x∗∈F(T)and{fn}be a sequence of kn-contraction mappings from C into H such that kn→κ.For given x∈C,let{xn}be a sequence in C generated by(.),where
{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying(C), (C), (C),and
(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where
R=maxx–x∗,sup n∈N
fnx∗–x∗
–kn
+ ∞
n=
( –αn)Tnx∗–x∗.
(b) If the following assumption holds: (C) ∞n=DBR[x∗](Tn,T) <∞, then{xn}converges strongly tox∗.
Proof We show that∞n=DBR[x∗](Tn,T) <∞implies thatlimn→∞ Tnvn–Tvn = for all
{vn}inBR[x∗]. Let{wn}be a sequence inBR[x∗]. Then
∞
n=
Tnwn–Twn ≤
∞
n=
DBR[x∗](Tn,T) <∞.
It follows thatlimn→∞ Tnwn–Twn = . Thus, the condition (C) in Theorem . holds.
For a sequence{un}inHwithun→u∈H, definefn:C→Hby
fnx=un, ∀x∈C.
Then eachfnis -contraction withfnx→fx=u. In this case algorithm (.) withTn=T
reduces to
xn+= ( –βn)xn+βnPC
αnun+ ( –αn)Txn
, ∀n∈N. (.)
Corollary . Let C be a nonempty closed convex subset of a real Hilbert space H and
T :C→C be a nonexpansive mapping such that F(T)=∅.Let{un}be a sequence in H such that un→u∈H and PF(T)(u) =x∗∈F(T).For given x∈C,let{xn}be a sequence in C generated by(.),where{αn}is a sequence in(, ]and{βn}is a sequence in(, ) satisfying(C)and(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where R=max{ x–x∗ ,supn∈N un–x∗ }.
(b) {xn}converges strongly tox∗.
Remark . Ifu= in Corollary ., then{xn} generated by Algorithm . converges
strongly to the minimum norm solution of the FPP (.). Corollary . also provides a closed ball in which{xn}lies. Therefore, Corollary . significantly extends and improves [, Theorem .].
3.2 The split feasibility problem
In this section we apply Theorem . to solve the SFP (.). We begin with theρ-distance: Definition . LetCandQbe two closed convex subsets of a Hilbert spaceHand letρ
be a positive constant. Theρ-distancebetweenCandQis defined by
dρ(C,Q) = sup x ≤ρ
PCx–PQx .
By employing Theorem ., we present a variable KM-like CQ algorithm (.) for finding solutions of the SFP (.) and prove its strong convergence.
Theorem . Let C and Q be two nonempty closed convex subsets of real Hilbert spaces
H and H, respectively,and let{Cn} and{Qn} be sequences of closed convex subsets of H and H,respectively.Let f :C→Hbe aκ-contraction and{fn}be a sequence of kn-contraction mappings from C into Hsuch that kn→κ.Let A:H→Hbe a bounded linear operator with the adjoint A∗.Forγ∈(, /L),define
T=PCI–γA∗(I–PQ)A, (.)
and
Tn=PCn
I–γA∗(I–PQn)A
Assume that SFP(.)is consistent with PF(T)fx∗=x∗∈F(T).For given x∈C,let{xn}be a sequence in C generated by the following variable KM-like CQ algorithm:
xn+= ( –βn)xn+βnPC
αnfnxn+ ( –αn)PCn
I–γA∗(I–PQn)A
xn, ∀n∈N, (.)
where{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying(C), (C), (C), and(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where
R=maxx–x∗,sup n∈N
fnx∗–x∗/( –kn)
+ ∞
n=
( –αn)Tnx∗–x∗.
(b) Ifρ=max{ Ax , (I–γA∗(I–PQ)A)x :x∈BR[x∗]}and the following assumption holds:
(C) ∞n=dρ(Cn,C) <∞and ∞
n=dρ(Qn,Q) <∞, then{xn}converges strongly tox∗.
Proof (a) Sinceγ∈(, /L),TandTnfor alln∈Nare nonexpansive mappings andF(T)= ∅because SFP (.) is consistent. Hence this part follows from Theorem .(a).
(b) Assume that
ρ=max Ax ,I–γA∗(I–PQ)Ax:x∈BRx∗.
Now, letx∈Hbe such thatx∈BR[x∗]. Since eachPCnis the nonexpansive, we have
Tnx–Tx =PCn
I–γA∗(I–PQn)A
x–PCI–γA∗(I–PQ)Ax
≤PCn
I–γA∗(I–PQn)A
x–PCn
I–γA∗(I–PQ)Ax
+PCn
I–γA∗(I–PQ)Ax–PCI–γA∗(I–PQ)Ax
≤γA∗(PQnAx–PQAx)
+PCn
I–γA∗(I–PQ)Ax–PCI–γA∗(I–PQ)Ax
≤γ A PQnAx–PQAx +dρ(Cn,C)
≤γ A dρ(Qn,Q) +dρ(Cn,C).
Thus,
∞
n=
DBR[x∗](Tn,T) = ∞
n= sup x∈BR[x∗]
Tnx–Tx
≤ ∞
n=
dρ(Cn,C) +γ A
∞
n=
dρ(Qn,Q) <∞.
Hence condition (C) in Theorem . holds. Therefore, Theorem .(b) follows from
For a sequence{un}inHwithun→∈H, definefn:C→Hby
fnx=un, ∀x∈C.
Then eachfnis -contraction withfnx→fx= . In this case variable KM-like CQ algo-rithm (.) reduces to the followingvariable KM-like CQ algorithm:
xn+= ( –βn)xn+βnPC
αnun+ ( –αn)PCn
I–γA∗(I–PQn)A
xn, ∀n∈N. (.)
We now present strong convergence of the variable KM-like CQ algorithm (.) to the minimum norm solution of the SFP (.).
Corollary . Let C and Q be two nonempty closed convex subsets of real Hilbert spaces Hand H,respectively,and let{Cn}and{Qn}be sequences of closed convex subsets of H and H,respectively.Let A:H→H be a bounded linear operator with the adjoint A∗. Forγ ∈(, /L),define T and Tnby(.)and(.),respectively.Assume that the SFP(.)
is consistent with PF(T)() =x∗∈F(T).For given x∈C and a sequence{un}in H with un→∈H,let{xn}be a sequence in C generated by a variable KM-like CQ algorithm
(.),{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying(C), (C),and
(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where
R=maxx–x∗,x∗+
∞
n=
( –αn)Tnx∗–x∗.
(b) Ifρ=max{ Ax , (I–γA∗(I–PQ)A)x :x∈BR[x∗]}and the assumption(C)holds,
then{xn}converges strongly tox∗.
Corollary . significantly extends and improves [, Theorem .].
3.3 The constrained multiple-sets split feasibility problem
In this section, we consider the followingmultiple-sets split feasibility problemwhich mod-els the intensity-modulated radiation therapy [] and has recently been investigated by many researchers, see, for example, [, , , –] and the references therein.
LetHandHbe two Hilbert spaces and letrandpbe two natural numbers. For eachi∈
{, , . . . ,p}, letCibe a nonempty closed convex subset ofHand for eachj∈ {, , . . . ,r}, let Qjbe a nonempty closed convex subset ofH. Further, for eachj∈ {, , . . . ,r}, letAj:H→ Hbe a bounded linear operator andbe a closed convex subset ofH. The (constrained)
multiple-sets split feasibility problem (MSSFP) is to find a pointx∗∈such that
x∗∈C:=
p
i=
Ci and Ajx∗∈Qj, j∈ {, , . . . ,r}. (.)
Whenp=r= , then the MSSFP (.) reduces to the SFP (.).
For eachi∈ {, , . . . ,p}andj∈ {, , . . . ,r}, letαiandβjbe two positive numbers. Let B:H→Hbe the gradient∇ψof a convex and continuously differentiable functionψ: H→Rdefined by
ψ(x) :=
p
i=
αi x–PCix +
r
j=
βj Ajx–PQjAjx
, ∀x∈H
. (.)
Following [], we see that
Bx:=
p
i=
αi(I–PCi)x+ r
j=
βjA∗j(I–PQj)Ajx, ∀x∈H, (.)
whereA∗j is the adjoint ofAj,j∈ {, , . . . ,r}. The nonexpansivity ofI–PCimplies thatBis a Lipschitzian mapping with Lipschitz constant
L∗:=
p
i=
αi+ r
j=
βj Aj . (.)
Thus, variable KM-like CQ algorithm can be developed to solve the MSSFP (.). Let {n},{Cn,i}and{Qn,j}be the sequences of closed convex sets, which are viewed as
pertur-bations for the closed convex sets,{Ci}and{Qj}, respectively.
We now present an iterative algorithm for solving the MSSFP (.).
Theorem . Let f : →H be a κ-contraction and let {fn} be a sequence of
kn-contraction mappings frominto Hsuch that kn→κ.Forγ ∈(, /L∗),define
Tx=Pn
x–γ
p
i=
αi(I–PCi)x+ r
j=
βjA∗j(I–PQj)Ajx
(.)
and
Tnx=Pn
x–γ
p
i=
αi(I–PCi,n)x+ r
j=
βjA∗j(I–PQj,n)Ajx
, n∈N. (.)
Assume that the MSSFP(.)is consistent with PF(T)fx∗=x∗∈F(T).For given x∈,let
{xn}be a sequence ingenerated by
xn+= ( –βn)xn+βnPC
αnfnxn+ ( –αn)Tnxn
, ∀n∈N,
where{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying(C), (C), (C), and(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where
R=maxx–x∗,sup n∈N
fnx∗–x∗/( –kn)+∞
n=
(b) Ifρ=max{max≤j≤p Ajx , (I–γ∇ψ)x :x∈BR[x∗]}and for eachi∈ {, , . . . ,p} andj∈ {, , . . . ,r},the following assumption holds:
(C) ∞n=dρ(n,) <∞,∞n=DBR[x∗](PCi,n,PCi) <∞and ∞
n=dρ(Qn,i,Q) <∞, then{xn}converges strongly tox∗.
Proof (a) Define
ψn(x) :=
p
i=
αi x–Pi,nx +
r
j=
βj Ajx–PQj,nAjx .
The gradients ofψandψnare given by
∇ψ(x) =
p
i=
αi(I–PCi)x+ r
j=
βjA∗j(I–PQj)Ajx
and
∇ψn(x) = p
i=
αi(I–PCi,n)x+ r
j=
βjA∗j(I–PQj,n)Ajx.
Hence, from (.) and (.), we have
Tx=P
x–γ∇ψ(x), and
Tnx=Pn
x–γ∇ψn(x)
, n∈N.
Sinceγ ∈(, /L∗), T andTn, for alln∈N, are nonexpansive mappings, andF(T)=∅
because the MSSFP (.) is consistent. Hence, this part follows from Theorem .(a). (b) Assume that
ρ=maxmax ≤j≤p Ajx ,
(I–γ∇ψ)x:x∈BR
x∗.
Letx∈Hbe such thatx∈BR[x∗]. Since eachPCnis the nonexpansive, we have
Tnx–Tx =Pn(I–γ∇ψn)x–P(I–γ∇ψ)x
≤Pn(I–γ∇ψn)x–Pn(I–γ∇ψ)x
+Pn(I–∇ψ)x–P(I–γ∇ψ)x
≤γ∇ψn(x) –∇ψ(x)+Pn(I–γ∇ψ)x–P(I–γ∇ψ)x
≤γ
p
i=
αi PCi,nx–PCix + p
j=
βjA∗j PQj,nAjx–PQjAjx +dρ(n,)
≤γ
p
i=
αiDBR[x∗](PCi,n,PCi) + p
j=
By the assumptions, we have
∞
n=
DBR[x∗](Tn,T) = ∞
n= sup x∈BR[x∗]
Tnx–Tx
≤γ
p
i=
αi
∞
n=
DBR[x∗](PCi,n,PCi)
+
p
j= Aj βj
∞
n=
dρ(PQj,n,PQj) + ∞
n=
dρ(n,) <∞.
Hence condition (C) in Theorem . holds. Therefore, Theorem .(b) follows from
The-orem .(b).
Theorem . significantly extends and improves [, Theorem ].
Finally, we present strong convergence of variable KM-like CQ algorithm (.) to the minimum norm solution of the MSSFP (.).
Corollary . Define T and Tnby(.)and(.),respectively.Assume that the MSSFP
(.)is consistent with PF(T)() =x∗∈F(T).For given x∈C and a sequence{un}in Hwith un→∈H,let{xn}be a sequence in C generated by the following variable KM-like CQ algorithm:
xn+= ( –βn)xn+βnPC
αnun+ ( –αn)Tnxn
for all n∈N,
where <γ < /L∗,{αn}is a sequence in(, ]and{βn}is a sequence in(, )satisfying
(C), (C),and(C).Then the following statements hold:
(a) The sequence{xn}generated by(.)remains in the closed ballBR[x∗],where
R=maxx–x∗,x∗+
∞
n=
( –αn)Tnx∗–x∗.
(b) Ifρ=max{max≤j≤p Ajx , (I–γ∇ψ)x :x∈BR[x∗]}and for eachi∈ {, , . . . ,p} andj∈ {, , . . . ,r},the assumption(C)holds,then{xn}converges strongly tox∗.
4 Numerical examples
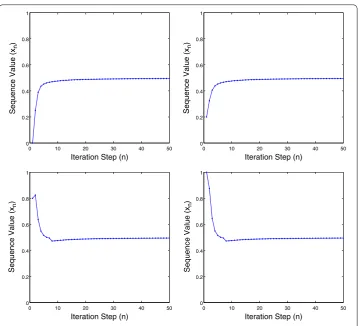
In order to demonstrate the effectiveness, realization, and convergence of algorithm of Theorem ., we consider the following example.
Example . LetH=RandC= [, ]. LetTbe a self-mapping onCdefined byTx= –x
for allx∈C. Define{αn}in (, ) byαn=n+ and{βn}byβn= for alln∈N. For each n∈N, definefn:C→H by (.). It is shown in Example . that{fn}is a sequence of nearly contraction mappings fromCintoHwith sequence{(kn,an)}, wherekn=n+ and
an=(n+). It is easy to see that{fn}converges pointwise tof, wheref(x) = for allx∈C. Notekn→κ= ,F(T) ={x∗}={/}, andlimn→∞fnx∗=fx∗. It can be observed that all the
Table 1 The numerical results for initial guessx1= 0, 0.2, 0.8, 1
n x1= 0 x1= 0.2 x1= 0.8 x1= 1
5 0.452291666666667 0.452604166666667 0.514843750000000 0.514947916666667 10 0.476041066961784 0.476041067553836 0.476047944746260 0.476047944894273 15 0.483829591828978 0.483829591828978 0.483829591829845 0.483829591829845 20 0.487787940564059 0.487787940564059 0.487787940564059 0.487787940564059 25 0.490187554131032 0.490187554131032 0.490187554131032 0.490187554131032 30 0.491798400218960 0.491798400218960 0.491798400218960 0.491798400218960 35 0.492954698188619 0.492954698188619 0.492954698188619 0.492954698188619 40 0.493825130132048 0.493825130132048 0.493825130132048 0.493825130132048 45 0.494504074844059 0.494504074844059 0.494504074844059 0.494504074844059 50 0.495048473664881 0.495048473664881 0.495048473664881 0.495048473664881
Figure 1 The convergence comparison of different initial valuesx1= 0, 0.2, 0.8, 1.
Tn=T converges to . In fact, under the above assumptions, the algorithm (.) can be
simplified as follows:
⎧ ⎪ ⎨ ⎪ ⎩
x∈C,
yn=αnfnxn+ ( –αn)( –xn), xn+=xn+PC[yn] for alln∈N.
The projection point ofynontoCcan be expressed as
PC[yn] = ⎧ ⎪ ⎨ ⎪ ⎩
, ifyn< ;
yn, ifyn∈C; , ifyn> .
The iterates of algorithm (.) for initial guessx= , ., ., are shown in Table . From
Table , we see that the iterations converge to / which is the unique fixed point ofT. The convergence of each iteration is also shown in Figure for comparison.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally and significantly in writing this article. All authors read and approved the final manuscript.
Author details
1Department of Mathematics, King Abdulaziz University, Jeddah, Saudi Arabia.2Department of Mathematics, Banaras Hindu University, Varanasi, 221005, India. 3Department of Mathematics, Aligarh Muslim University, Aligarh, 202 002, India. 4Department of Mathematics & Statistics, King Fahd University of Petroleum and Minerals, Dhahran, Saudi Arabia.
Acknowledgements
This article was funded by the Deanship of Scientific Research (DSR), King Abdulaziz University, Jeddah. Therefore, the authors acknowledge with thanks DSR, for technical and financial support.
Received: 9 May 2014 Accepted: 16 September 2014 Published:14 Oct 2014 References
1. Xu, HK: A variable Krasnosel’ski˘ı-Mann algorithm and the multiple-set split feasibility problem. Inverse Probl.22, 2021-2034 (2006)
2. Byrne, CL: Iterative oblique projection onto convex subsets and split feasibility problem. Inverse Probl.18, 441-453 (2002)
3. Byrne, CL: A unified treatment of some iterative algorithms insignal processing and image reconstruction. Inverse Probl.20, 103-120 (2004)
4. Censor, Y, Bortfeld, T, Martin, B, Trofimov, A: A unified approach for inversion problems in intensity-modulated radiation therapy. Phys. Med. Biol.51, 2353-2365 (2006)
5. Censor, Y, Elfving, T: A multiprojection algorithm using Bregman projections in a product space. Numer. Algorithms8, 221-239 (1994)
6. Censor, Y, Elfving, T, Kopf, N, Bortfeld, T: The multiple-sets split feasibility problem and its applications for inverse problems. Inverse Probl.21, 2071-2084 (2005)
7. Censor, Y, Motova, A, Segal, A: Perturbed projection and subgradient projections for multiple-sets split feasibility problem. J. Math. Anal. Appl.327, 1244-1256 (2007)
8. Ceng, LC, Ansari, QH, Yao, JC: Relaxed extragradient methods for finding minimum-norm solutions of the split feasibility problem. Nonlinear Anal.75, 2116-2125 (2012)
9. Ceng, LC, Ansari, QH, Yao, JC: An extragradient method for split feasibility and fixed point problems. Comput. Math. Appl.64, 633-642 (2012)
10. Ceng, LC, Ansari, QH, Yao, JC: Mann type iterative methods for finding a common solution of split feasibility and fixed point problems. Positivity16, 471-495 (2012)
11. Dang, Y, Gao, Y: The strong convergence of a KM-CQ-like algorithm for a split feasibility problem. Inverse Probl.27, Article ID 015007 (2011)
12. Masad, E, Reich, S: A note on the multiple-set split convex feasibility problem in Hilbert space. J. Nonlinear Convex Anal.8, 367-371 (2007)
13. Sahu, DR: Applications of theS-iteration process to constrained minimization problems and split feasibility problems. Fixed Point Theory12, 187-204 (2011)
14. Yang, Q: The relaxed CQ algorithm for solving the split feasibility problem. Inverse Probl.20, 1261-1266 (2004) 15. Moudafi, A: Viscosity approximation methods for fixed-point problems. J. Math. Anal. Appl.241, 46-55 (2000) 16. Suzuki, T: Sufficient and necessary condition for Halpern’s strong convergence to fixed points of nonexpansive
mappings. Proc. Am. Math. Soc.135, 99-106 (2007)
17. Takahashi, W: Viscosity approximation methods for countable families of nonexpansive mappings in Banach spaces. Nonlinear Anal.70, 719-734 (2009)
18. Yao, Y, Xu, HK: Iterative methods for finding minimum-norm fixed points of nonexpansive mappings with applications. Optimization60(6), 645-658 (2011)
19. Xu, HK: Viscosity approximation methods for nonexpansive mappings. J. Math. Anal. Appl.298, 279-291 (2004) 20. Sahu, DR, Wong, NC, Yao, JC: A unified hybrid iterative method for solving variational inequalities involving
21. Sahu, DR, Wong, NC, Yao, JC: A generalized hybrid steepest-descent method for variational inequalities in Banach spaces. Fixed Point Theory Appl.2011, Article ID 754702 (2011)
22. Sahu, DR: Fixed points of demicontinuous nearly Lipschitzian mappings in Banach spaces. Comment. Math. Univ. Carol.46, 653-666 (2005)
23. Agarwal, RP, O’Regan, D, Sahu, DR: Fixed Point Theory for Lipschitzian-Type Mappings with Applications. Topological Fixed Point Theory and Its Applications, vol. 6. Springer, New York (2009)
24. Maing, PE: Approximation method for common fixed points of nonexpansive mappings in Hilbert spaces. J. Math. Anal. Appl.325, 469-479 (2007)
25. Suzuki, T: Strong convergence theorems for infinite families of nonexpansive mappings in general Banach spaces. Fixed Point Theory Appl.2005, 103-123 (2005)
26. Lopez, G, Martin, V, Xu, HK: Perturbation techniques for nonexpansive mappings with applications. Nonlinear Anal. 10(4), 2369-2383 (2009)
27. Yao, Y, Shahzad, N: New methods with perturbations for nonexpansive mappings in Hilbert spaces. Fixed Point Theory Appl.2011, Article ID 79 (2011)
28. Bruck, RE, Reich, S: A general convergence principle of nonlinear functional analysis. Nonlinear Anal.4, 939-950 (1980)
10.1186/1687-1812-2014-211
Cite this article as:Latif et al.:Variable KM-like algorithms for fixed point problems and split feasibility problems.