(UDC: 004.932.72’1)
Linear feature extraction techniques for object recognition: study of PCA
and ICA
C. L. Chowdhary
Assistant Professor (Senior)
Image Processing and Graphics Vision ((IPGV) Division, School of Information Technology and Engineering (SITE), VIT University, Vellore, India.
Email: [email protected], [email protected]
Abstract
In this paper, we have compared linear techniques for object recognition. 3D object recognition is the process of matching an object to a scene description to determine the objects identity and / or its pose in space. Several face recognition techniques uses unsupervised statistical methods. The basic idea is to compute the principal components as sequence of image vectors incrementally, without estimating the covariance matrix and at the same time transforming these principal components to the independent directions that maximize the non–Gaussianity of the source. We illustrate the potential of PCA and ICA on a database of 1440 images of 20 different objects captured by CCD camera. The excellent recognition rates achieved in all the performed experiments indicate that the present method is well suited for appearance-based 3D object recognition and pose estimation.
Key words: Principal Component Analysis (PCA), Independent Component Analysis (ICA), Blind Source Separation (BSS), Three-dimensional Object Recognition (3DOR), COIL-20 (Columbia Object Image Library), Appearance-based Object Recognition.
1. Motivation
In computer vision problem, the recognition system typically consists of sensors, and model database in which all the object representations and decision-making abilities are saved. Human activities, relies heavily on the classification or identification of a large variety of visual objects. Recently, object recognition has been found in a great range of applications like Surveillance, Robot vision, Security etc. For the view-based recognition, the representations take into account the appearance of the object. Hence to achieve three-dimensional object recognition (3DOR), the pose of the object is the main considerations. The objective of the 3DOR algorithm is not only to recognize the object precisely but also to identify its pose as viewed. Then a recognition algorithm tries to find the model to which the object best matches.
2. Feature Extraction Techniques
Several approaches have been introduced for 3D object recognition. The conventional approach use the edge information in one form or the other, since, edges contain more information about the scene based on human visual system. This has prompted the use of edge information in the development of 3D Object Recognition algorithms. Traditionally robot vision systems have also utilized the shape of objects for recognition. Many of these methods explicitly exploit the features extracted only from the shape of the objects i.e. lines, curves, and vertices, which are called geometric features. In contrast to the geometric features, appearance of an object is properties, pose, and the illumination. The approaches that take explicitly these factors into account for use in object recognition have been categorized as appearance-based object recognition methods.
The central idea in the appearance-based approach is to represent the images in terms of their projection onto a low-dimensional space. In this space the important characteristics of the object to be recognized can be captured. One popular method to obtain a low-dimensional space is principal component analysis (PCA) (Karhunen et al. 1994). The low-dimensional space has been called the eigenspace, and the projections of the images onto this space are called the eigenfaces. Several variants like PCA (Karhunen et al. 1994), Kernal PCA and independent component analysis (ICA) (Harkirat S. Sahambi et al. 2003) are also widely used in 3D object recognition. In these methods, the images of the objects are taken from various pose angles, and their compressed features are saved in a database. The test images are taken in similar conditions and the features extracted from them are matched against the database to determine the identity of the object along with its pose angle.
By solving an eigenvalue system problem, the conventional principal component analysis algorithm (Karhunen et al. 1994) takes eigenvectors and eigenvalues for a covariance matrix derived from a set of objects size. Other important technique called independent component analysis (P. Common 1994), is used for separating independent components from the set of unknown mixtures. There is no a correlation or dependency between different objects and these algorithms require the image data matrix before solving the problem.
The FastICA method does not have a solution if the random variables to estimate are Gaussian random variables. This is due to the fact that the joint distribution of the elements of X will be completely symmetric and doesn’t give any special information about the columns of A. In this paper, S is always a non- Gaussian vector.
This method includes PCA and ICA. This algorithm has taken from (Issam Dagher et al. 2006) and the performance of this algorithm is much better for face recognition compared to object recognition. But in the percentage wise recognition it is not good as face recognition.
non-Gaussian vectors as outputs. It works like a linear system that predicts the next state vector from an input vector and a current state vector. The non-Gaussian components will be updated from the previous components values and from a new input image vector by processing sequentially the IPCA and the FastICA algorithms.
The object recognition was done by projecting the input test objects and comparing the resulting coordinates with those of the training images in order to find the nearest appropriate object. The data consists of n images and a set of k non-Gaussian vectors are given. Initially, all the non-Gaussian vectors are chosen to describe an orthonormal basis.
3. Experimental Results with recognition
Each object database is truncated into two sets. The training set that contains images used to calculate the independent non - Gaussian vectors and come up with the appropriate basis and, the test set that contains images to be tested by the Object recognition algorithm in order to evaluate the performance of the proposed method.
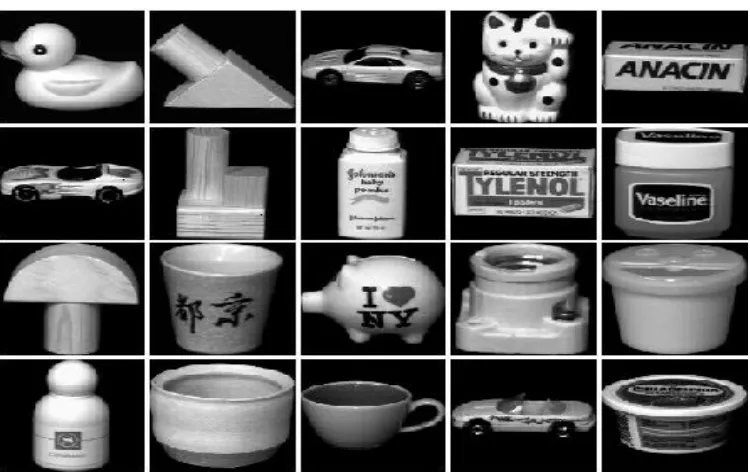
Fig. 1. COIL database of 20 objects.
Object recognition and pose estimation experiments were performed by using Matlab7.1. The object set is the COIL-20 (Columbia Object Image Library) database (J. Rubner et al.1990), each object is positioned in the center of a turntable. The images were taken at every 50 of pose angle, i.e. the object is rotated and an image is taken after every 50 of rotation from 00
to 3600 degrees. This gave 72 images of each object, and 1440 total number of images. The size
of the images is rescaled to 64x64.The 00 pose angle views of the 20 images are shown in Fig.1.
The maximum pixel value is 255.
of pose angle to make the training images. In the first experiment, images separated by 500 in
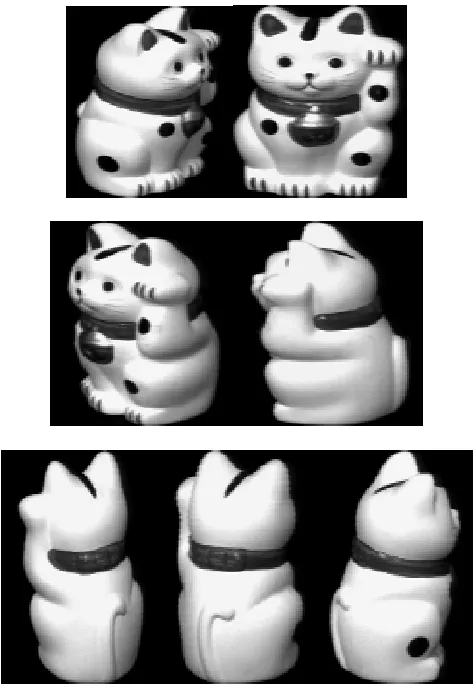
pose angle were chosen to construct the representative non Gaussians space of the images. That is to say, there are 7 training images for each object, making a total of 160 training images. The training views of the first object are shown in Fig 2.
Fig. 2. Training images of the fourth objects sampled by every 500
3.1. Results with Pose Angle Sampling at Every 500
The data is presented to the network as described in the previous section. The recognition is achieved by finding the minimum distance between the coefficients of a test image and the training images. The image in the training set that is nearest to the test image non Gaussian vector is chosen as the recognized image.
Training images are sampled by 500 in pose angle. That is to say, there are 8 training
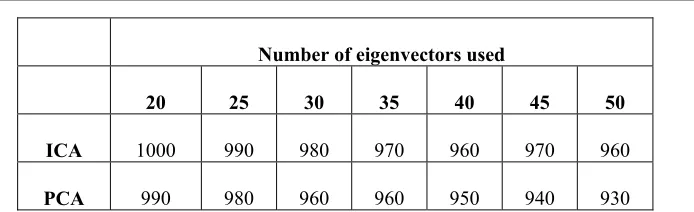
Number of eigenvectors used
20 25 30 35 40 45 50
ICA 1000 990 980 970 960 970 960
PCA 990 980 960 960 950 940 930
Table 1. Number of correct recognitions by using both ICA and PCA. The Pose angle sampling is 500. The recognitions are shown for a Total of 1280 test images.
3.2. Results with Pose Angle Sampling at Every 250
The previous experiment is also repeated by using images sampled at every 250. This gave a
total of 300 training objects, and the rest, 1140 images as the test objects. In this case, there is more information for the network to learn. The performance in both the PCA and ICA is increased. Number of non Gaussian vectors as follows: q= {20, 25,30,35,40, 45, 50} and the Table 2 shows the results and represents the test applied to that object.
From the above figures and tables, we can see the, present method produced better results, and the recognition rate has got a significant increasing compared with PCA. We can come to the conclusion that the performance of ICA outperformed the linear PCA. But the Incremental PCA is recursive method and the non Gaussian vectors is calculated for each image and the non dominant vectors are not considered for the next stage so this method is best suitable for 3D object recognition, performance of higher recognition rate is obtained when Number of non Gaussian vectors equals to 7, the average success rate for the PCA and ICA methods is shown in Table 3.
Number of eigenvectors used
20 25 30 35 40 45 50
ICA 970 1090 900 910 944 950 930
PCA 980 980 910 920 900 980 920
Table 2. Number of correct recognitions by using both ICA and PCA. The Pose angle sampling is 250. The recognitions are shown for a Total of 1140 test images.
COIL1(250) COIL2(500 )
PCA 82.58 74.88
ICA 83.88 76.22
PCA+ICA 83.23 75.55
4. Conclusions
In this paper, two feature extraction techniques for object recognition by incremental update of the non-Gaussian independent vectors has been compared. The method used is a current research issue of computing dominating non-Gaussian vectors from an incrementally arriving high-dimensional data stream without computing the corresponding covariance matrix and without knowing the data in advance. The results with this method are compared with PCA and ICA.
The images of the COIL database have been originally used by many people for testing the appearance-based recognition system, based on the notion of parametric non Gaussian space My results seem to compare favorably with respect to the results reported in (Issam Dagher et al. 2006)(Harkirat S. Sahambi et al. 2003), Note that ICA not only allows for the construction of training images of much smaller size, but also can identify the object pose. Experiment results in appearance-based 3D Object Recognition confirm ICA offer better recognition rates.
Извод
Технике
издвајања
са
линеарном
карактеристиком
за
препознавање
објеката
:
ИЦА
и
ЕЦА
C. L. Chowdhary
Assistant Professor (Senior)
Image Processing and Graphics Vision ((IPGV) Division, School of Information Technology and Engineering (SITE), VIT University, Vellore, India.
[email protected], [email protected]
Резиме
Уовомрадусмопоредилилинеарнетехникезапрепознавањеобјеката. 3Дпрепознавање објектајепроцеспрепознавањаобјектапремаописусценекакобисеутврдиоидентитет објектаи / илињеговположајупростору. Неколикотехникапрепознавањалицакористе ненадгледане статистичке методе. Основна идеја се своди на израчунавање главних компонентикаонизавекторасликаинкрементално, безпроценековаријантнематрицеи у исто време трансформисање ових главних компоненти на независне правце који максимизују не-Гаусову расподелу извора. Представљамо потенцијал ПЦА (метода главнихкомпоненти) иИЦА (методанезависнихкомпоненти) набазикојасадржи 1440
слика 20 различитихобјекатасликанихЦЦДкамером. Одличаннивопрепознавања који је постигнут у свим експериментима показује да ова методологија погодна за 3Д препознавањеобјекатаипроценуположаја.
Кључне речи: Метода Главних Компоненти (ПЦА), Метода Независних Компоненти
(ИЦА), Слепо издвајање извора (БСС), Тродимензионално препознавање објеката
(3DOR), COIL-20 (Columbia Object Image Library), Препознавење објеката према појављивању.
References
A. Hyvärinen, J. Karhunen, and E. Oja (2001). Independent Component Analysis: Wiley. Besl,P.J. and Jain,R.C.,March (1985). “3D Object Recognition.” ACM Computer surveys Vol
17, No. 1, pp 75-145.
C. Jutten and J. Herault (1991). “Blind separation of sources, part 1: an adaptive algorithm based on neuromimetic architecture,” Signal Processing, vol. 24, no. 1, pp. 1–10.
Chiranji Lal Chowdhary (2011) Appearance-base 3D Object Recognition and Pose Estimation, LAP LAMBERT Academic Publishing GmbH & Co. KG, Germany. www.lappublishing.com. ISBN 978-3-8433-9115-3.
Dr. V.K Ananthashayana (2003). “Face Detection using ICA with DCT faces” International conference on IT Nepal.
Harkirat S. Sahambi and K. Khorasani (2003). “A Neural-Network Appearance-Based 3-D Object Recognition Using Independent component Analysis”, neural networks,vol.14,no. 1. http://csnet.otago.ac.nz/cosc453/student_tutorials/principal_components.pdf
http://www.cran.r-project.org/doc/packages/fastICA.pdf
Issam Dagher and Rabih Nachar (2006). “Face Recognition Using IPCA-ICA Algorithm”, IEEE transactions on Pattern Analysis and Machine Intelligence, vol. 28, no. 6.
J. Karhunen and J. Joutsensalo (1994). “Representation and Separation of Signals Using Non Linear PCA Type Learning”, Neural Networks, vol. 7, no. 1.
J. Rubner and K. Schulten (1990), “Development of Feature Detectors by Self-Organization,” Biological Cybernetics, vol. 62, pp. 193-199.
K. Fukunaga (1996). Introduction to Statistical Pattern Recognition, second ed. New York: Academic Press, pp. 831-836.
M. A. Turk and A. P. Pentland (1991). “Face recognition using Eigenspaces,” in Proc. IEEE Computer Society Conf. Computer Vision Pattern Recognition, Maui, HI, pp. 586–591. M.Hafed and martin D. Levine (2001). “Face Recognition Using the Discrete Cosine transform
International Journal of Computer Vision 43(3), 167–188.
Marian Stewart Bartlett, Javier R. Movellan, and Terrence J. Sejnowski (2002). “Face Recognition by Independent Component Analysis”, Neural networks, vol. 13, no. 6.
P. Common (1994). “Independent Component Analysis, a New Concept?”, Signal Processing, vol. 36, no. 3.
S. A. Nene, S. K. Nayar, and H. Murase. (1996) Columbia object image library (coil-20). Columbia University. [Online] http://www.cs.columbia.edu/CAVE/