International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
406
A Study and Analysis of Wireless based Localization and
Motion Processing Systems for Healthcare Applications
Richa Singh (M.Tech.)
1, Sumit Sharma (Assistant Professor)
2, Ravi Mohan (HOD, Assistant Professor)
31,2,3
Dept. of Electronics and Communication Engineering, Shri Ram Institute of Science & Technology, Jabalpur (M.P.), India
Abstract—Position estimation and motion processing in 3-D space are becoming increasingly popular because they find applications in many fields including navigation, surveying, gaming, security, medical, etc. Conventional tracking systems are based on a global positioning system (GPS) or similar principles. Traditionally, localization is done with the help of distance measurements of known reference and unknown target points with respect to each other. The coordinate of unknown target point can be obtained by solving set of quadratic distance equations. In this paper, we study a number of localization and motion processing systems and compare them based on several performance metrics. In our study, we consider a range of previously proposed designs and systems that can be employed in a room-size setting for healthcare and medical applications. We also discuss the basic building blocks and main components of such systems including the choices of communication protocols, suitable sensor network architecture, and tracking algorithm. Finally, we present our analysis of uncertainties in localization and the sources from which these errors arise.
Keywords—Healthcare, Localization, Motion processing, Sensor network, Trilateration, Wireless protocols
I. INTRODUCTION
Human-body tracking and localization is receiving worldwide attention from researchers of different fields [1-3, 20-22]. The interest is primerily due to the emergence of wide range of applications from various disciplines i.e.
healthcare, surveillance, security, human-computer
interaction. Most of the human-body motion tracking systems are based on vision sensors. Recently, there has been a significant exploration in tracking people trajectory across multiple image views. Some of these proposed approaches also incorporate systems that are capable of segmenting, detecting and tracking people using multiple synchronized surveillance cameras located far from each other. However, such systems try to hand-off image-based tracking from camera-to-camera without recovering real-world coordinates.
Another set of approaches in localization and tracking are based on capturing of large video sequences. One major downside of video based approaches is that they also jeoperdize the privacy concern of people. Most recent work on vision based people tracking systems leverages wireless sensor networks with low resolution camera to predict the trajectory of human movement. However, most vision-based approaches to moving object detection are computationally intensive and costly expensive. They often involve intensive real-time computations, such as image matching, background subtraction, and overlapping identification. In fact, in many cases, due to the availability of prior knowledge on target motion kinematics, the intensive and expensive imaging detector array appears inefficient and unnecessary.
Numerous ineffieicenies in current localization systems enforce the need of a fresh look into the low cost sensing that can be effectiely used in medical applications for localization and tracking purposes. The organization of paper is as follows: Section II overviews related work. Section III motivates the need of a tracking system for medical applications. Section IV and V present the basics of localization. Section VI discusses the uncertainity in distance measurement. Section VII presents the suitable metrics to compare various systems. Section VIII lists future work before Section IX concludes.
II. BACKGROUND AND RELATED WORK
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
407 To the best of our knowledge, previous research in location tracking has generally resulted in creation of specialized hardware and technologies that are severely limited. As an example, systems that use infrared (IR) wireless technology have been reported in various academic proposals [2], [3], [4] and primarily are used as tags in shops and warehouses. The limited range of an IR network, which facilitates user location, is a hurdle in providing good enough coverage. To overcome this problem, a few proposals developed RF-tag based location systems as well [10], [12]. Unfortunately, these systems, like their IR counterparts, are often built for the sole purpose of determining users location, i.e., they do not provide any motion tracking and continuous monitoring services. Furthermore, they all use specialized hardware and are generally cost prohibitive and rather rigid.
The seminal work in IR-based location systems is the Active Badge system reported in [2], [6]. In this system, a badge worn by a person emits a unique IR signal every 10 seconds. Sensors placed at known positions within a building pick up the unique identifiers and relay these to the location manager software. While this system provides accurate location information, it suffers from several drawbacks: (a) scales poorly due to the limited range of IR, (b) incurs significant installation and maintenance costs, and (c) performs poorly in the presence of direct sunlight, which is likely to be a problem in rooms with windows.
Another recent RF-based location determination systems called the Duress Alarm Location System. This system uses RF signal strengths to determine user location. DALS system (a) depends on specialized hardware (b) requires infrastructure deployment over and above a wireless data network, (c) does not take into consideration the effect of the user’s body orientation on RF signals. Another interesting indoor RF system is the 3D-iD RF tag system built by PinPoint Corporation. Antennas planted around a facility emit RF signals at 2.4 GHz. Various antennas receive the signal, and send the results to cell controllers, which triangulate the reflections to determine the tag's whereabouts. The system’s locating ability varies depending on the number of antennas installed in an area but the best advertised resolution is 10 feet.
In the wide-area cellular arena, several location determination systems have recently been proposed. The technological alternatives for locating cellular telephones involve measuring the signal attenuation, the angle-of-arrival (AOA), and/or the time-difference-of-angle-of-arrival (TDOA).
While these systems have been found to be promising in outdoor environments, their effectiveness in indoor environments is limited by the multiple reflections suffered by the RF signal, and the inability of off-the-shelf and
inexpensive hardware to provide fine-grain time
synchronization.
Researchers have also studied and built systems using alternative technologies. One such system uses pulsed DC magnetic fields to determine user orientation while another one uses ultrasound signals to determine user location. While these technologies and systems are very interesting, they generally suffer the same drawbacks as their IR and RF-tag counterparts. Their specialized hardware is generally targeted at specific applications, tending to make the system cost prohibitive, range limited, and unsuitable for large-scale deployment in applications like healthcare tracking. Table I summarizes numerous systems that have been proposed in recent years for localization purposes.
III. MOTIVATION:HEALTHCARE APPLICATIONS
We want to understand and explore the systems that are non-invasive and can be used in a room-like setting to study Parkinson disease patients. Monitoring systems used in United States and elsewhere in the world to study the Parkinson disease patients are based on video monitoring. A patient is brought into a medical facility and constantly monitored over a period of time for few hours. Subsequently a human observer makes a decision based on the hand and head movement about the prescription of medicine needed for the patient.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
408
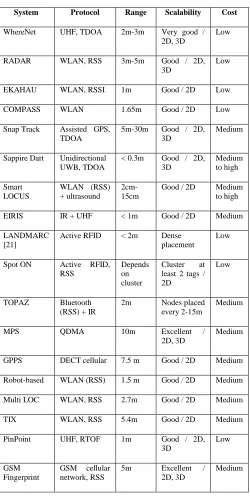
TABLEI
COMPARISON OF VARIOUS LOCALIZATION SYSTEM
System Protocol Range Scalability Cost
WhereNet UHF, TDOA 2m-3m Very good / 2D, 3D
Low
RADAR WLAN, RSS 3m-5m Good / 2D, 3D
Low
EKAHAU WLAN, RSSI 1m Good / 2D Low
COMPASS WLAN 1.65m Good / 2D Low
Snap Track Assisted GPS, TDOA
5m-30m Good / 2D, 3D
Medium
Sappire Dart Unidirectional UWB, TDOA
< 0.3m Good / 2D, 3D
Medium to high
Smart LOCUS
WLAN (RSS) + ultrasound
2cm-15cm
Good / 2D Medium to high
EIRIS IR + UHF < 1m Good / 2D Medium
LANDMARC [21]
Active RFID < 2m Dense placement
Low
Spot ON Active RFID, RSS
Depends on cluster
Cluster at least 2 tags / 2D
Low
TOPAZ Bluetooth (RSS) + IR
2m Nodes placed every 2-15m
Medium
MPS QDMA 10m Excellent /
2D, 3D
Medium
GPPS DECT cellular 7.5 m Good / 2D Medium
Robot-based WLAN (RSS) 1.5 m Good / 2D Medium
Multi LOC WLAN, RSS 2.7m Good / 2D Medium
TIX WLAN, RSS 5.4m Good / 2D Medium
PinPoint UHF, RTOF 1m Good / 2D, 3D
Low
GSM Fingerprint
GSM cellular network, RSS
5m Excellent / 2D, 3D
[image:3.612.320.576.96.287.2]Medium
Figure 1: Depiction of room-size location and motion tracking system for healthcare applications
A generic scheme for indoor localization is depicted in Figure 1. In a room-size setting, location of patient (head and hands) can be determined by sensors mounted on ceiling at known coordinates. These sensors measure the distance of their targets. Over time these distances and their differences can be used to pinpoint the exact locations and movements of subject. Because each sensor is only meant to determine the distances, it can be very simple and designed for power efficiency. Finally all the distances are send to a centralized trilateration system (CTS). In many cases, where the patients can not be brought to medical facilty, CTS can send the movements in body to medical facility in regualr interval using internet. Such a system avoids many of the limitations of the previously prosed systems and yet is flexible at the same time to allow further enhancements while it is deployed in the field.
IV. LOCALIZATION AND POSITION ESTIMATION
[image:3.612.45.295.139.635.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
409 Distance estimation phase involves measurement techniques to estimate the relative distance between the nodes. Position computation consists of algorithms to calculate the coordinates of unknown node with respect to the known anchor nodes or other neighbouring nodes. Finally, the localization algorithm determines how the
information concerning distance and position is
manipulated in order to allow most or all of the nodes of a network to estimate their position. Optionally, the localization algorithm may involve algorithms to reduce the errors and refine the node positions.
A. Mathematical Foundation: Trilateration
Trilateration is commonly used method to determine the position of a target point/object based on simultaneous
distance measurement from three other known
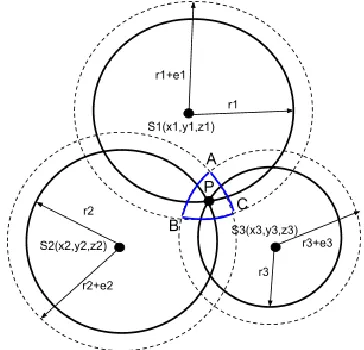
[image:4.612.76.258.389.564.2]points/stations (also known as references) located at known sites. This operation is common in kinematics, aeronautics, crystallography, computer vision, robot localization and many other. Here is the basic principle upon which it works. Assume we know the coordinates of three reference points/stations S1, S2 and S3 known which are (x1,y1,z1), (x2,y2,z2) and (x3,y3,z3) as shown in the Figure 2.
Figure 2: 2-D view of 3-D trilateration using 3 sensors.
If we know the precise distance of point P from three known stations then the problem of finding the position of unknown point P can be expressed as the intersection of three spheres and solution can be obtained by solving the system of three quadratic equations written below.
(x – x1)2 + (y – y1)2 + (z – z1)2 = r12
(x – x2)2 + (y – y2)2 + (z – z2)2 = r22
(x – x3) 2
+ (y – y3) 2
+ (z – z3) 2
= r3 2
However, if the distances are not known precisely then these equations give us a region as oppose to single unique point. The solution would lie within this region which is denoted by solid region ABC in the Figure 2.
B. Distance Estimation
In order to measure the distance of the unknown point from the reference points there are many distance estimation techniques. We are going to briefly review some of them here. Any of these can be employed based on the performance needed and the overall budget.
1. Time-of-arrival (TOA) based Technique: In this technique the distance information is extracted from the propagation delay between a transmitter and a receiver. TOA based techniques can be further classified into: (1) TOA one-way ranging, requires perfect synchronization between transmitter and receiver, and (2) TOA two-way ranging, does not require synchronization.
2. Time-difference-of-arrival (TDOA) based Technique: In TDOA based technique the difference between TOA in several receivers is used to reconstruct a transmitter position. This could be based on the difference in the times at which a single signal from a single node arrives at three or more nodes. This technique requires highly precise synchronization between the receivers.
3. Angle-of-arrival (AOA) based Technique: In AOA
based technique the distance between nodes is
reconstructed from the angle between them. This technique requires specialized hardware that means adoption of antenna arrays and a minimum distance between the antenna elements which results additional costs and larger node sizes. This technique is highly sensitive to multipath, Non-line-of-sight (NLOS) condition and array precision.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
410 5. Pattern matching based Technique: In pattern matching based techniques fingerprint information of the measured radio signals at different geographical locations are utilized for position estimation. Such information should be location sensitive and can be collected during a training (off line) phase in a database. During the real time (on time) phase, the fingerprint information can be used to locate the mobile node. Drawback of this technique is it becomes unreliable as the landscape changes.
V. BASIC BUILDING BLOCKS OF TRACKING SYSTEMS
A. Sensor Network
RF or radar sensors are best choices that can be used to measure the distance of an object. Unlike other sensors they do not require the line-of-sight and visibility. Radar works on sound wave and transmits them in all directions. When they reflect back then by measuring the time which it took for the sound wave to travel to the object we measure the distance. These specific features of radar sensors make the perhaps most suitable among others to be used in distance measurement applications.
B. Wireless Communication Protocols
The most common wireless technologies use
electromagnetic wireless telecommunication, such as radio. With radio waves distances can be short, such as a few meters for television remote control, or as far as thousands or even millions of kms for deep-space radio communications. Less common methods of achieving wireless communications include the use of light, sound, magnetic, or electric fields. A typical modern day wireless communications can be via:
Radio communication, flexible distance measurements
Microwave communication, long-range line-of-sight
via highly directional antennas
Light, visible and infrared (IR), used in consumer IR devices such as remote controls
Sonic, especially ultrasonic short range communication
Electromagnetic induction short range communication
1. Infrared (IR) based System: The biggest advantage of IR is its wide availability since many devices are equipped with IR devices such as mobile phones, TV, printer, PDA etc. In this system the whole infrastructure is very simple, it does not need costly installation and maintenance. However, there are some limitations like line-of-sight requirement and its inability to penetrate opaque obstacles. Systems based on these technologies are Active Badge, Firefly, and OPTOTRK.
2. Radio Frequency (RF) based System: System based on RF can cover larger distances and it uses electromagnetic transmission, which is able to penetrate opaque objects, Such as people and walls. Triangulation and fingerprint techniques use RF based system. Based on this technology, RFID (Radio Frequency Identification), WLAN (wireless local area network), Bluetooth, Wireless Sensor Networks, UWB (Ultra Wide Band) are created. RF based technologies are divided into narrow band based technologies (RFID, Bluetooth, WLAN) and Wide band technologies (UWB). Among all these technologies UWB is most accurate and fault–tolerant system that has a widespread usage in indoor localization.
ZigBee is an RF based wireless technology developed as an open global standard to address the unique needs of low-cost, low-power, wireless sensor networks. The standard takes full advantage of the IEEE 802.15.4 physical radio specification and operates in unlicensed bands worldwide at the following frequencies: 2.400-2.484GHz, 902-928MHz and 868.0-868.6MHz. The ZigBee protocol was engineered by the ZigBee Alliance, a non-profit consortium of leading semiconductor manufacturers, technology providers, OEMs and end-users worldwide. In general, Zigbee protocol features:
Low duty cycle, long battery life, low latency, support for multiple topologies: static, dynamic, star and mesh
Direct Sequence Spread Spectrum (DSSS), up to
65,000 nodes on a network, 128-bit AES encryption - provides secure connections between devices
Collision avoidance, link quality indication, clear channel assessment, retries and acknowledgements are also supported
3. Ultrasound based System: Ultrasound technology is relatively cheap but the precision is lower in compared to IR based systems due to the reflect influence. This kind of system is always associated with RF technology to fulfil the synchronization requirement, which may increase the cost of the whole system. Active Bat and Cricket are example of ultra sound based system.
C. Human Movement Tracking Systems
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
411 According to sensor location on a human body, tracking system can be classified as followings:
1. Non-vision based tracking: In non-vision based systems, sensors are attached to the human body to collect movement information. Their sensors are commonly classified as mechanical, inertia, acoustic, radio or microwave magnetic sensing. Some of them have a small sensing footprint that they can monitor small amplitude such as finger or toe movement. Each kind of sensor has advantages and limitations. Limitations include modality specific, measurement specific and circumstance specific that accordingly affect the use of the sensors in different environments.
2. Vision based tacking with markers: This is a technique that uses optical sensors or cameras to track the human movements, which are captured by placing identifiers upon the human body. As human skeleton is a highly articulated structure, twists and rotation make the movement in 3-D space. As a consequence, each body part continuously moves in and out of occlusion from the view of the cameras, leading to inconsistent and unreliable tracking of the human body. As a good solution to this situation marker based vision system have attracted the attention of researchers in medical science, sport science and engineering. One major drawback of using optical sensors and markers is that they are difficult to use to accurately sense joint rotations, leading to infeasibility of representing a real 3-D model for the sensed objects.
3. Vision based tracking without markers: This technique exploits external sensors like cameras to track the movement of human body. It is motivated by facts addressed in marker based vision systems: (a) Identification of standard body landmarks can be unreliable. (b) The soft tissue overlying Body landmarks can move, giving rise to noisy data. (c) The marker itself can wobble due to its own inertia. (d) Markers can even come a drift completely.
4. Robot assisted tracking: Recently, a voluntary repetitive exercise administered with the mechanical assistance of robotic rehabilitators has proven effective in
improving arm movement ability in post-stroke
populations. During the course of rehabilitation, using sensors attached to the body, which consist of electromechanical and electromagnetic sensors, reflects human movement. An electromechanical system prohibits free movements and involves disconnecting sensors from the body. The electromagnetic approach provides more freedom for human movement, but is seriously affected by directional sensors.
D. Advantages of Wireless Communication Protocols The most obvious characteristic of choice of communication protocol is that wired communication needs a physical connection while wireless does not. Generally, wired communication has higher quality signals, more capacity and less interference than wireless communication. Furthermore, wired communication is more secure than wireless communications because electromagnetic waves transfer in the air so signals can be easily intercepted. Typically, wired communication is used
for data and video transmission while wireless
communication is used for audio transmission because data transmission needs higher accuracy. To summarize, wireless communication is less complex, less expensive and possibly more convenient than wired communication, however, due to the transmission characteristics of electromagnetic waves, wireless communication is also vulnerable to interference. Finally, wired communications are mainly used in long-distance transmission while wireless communications are used in short-distance transmission. For our application the wireless based communication protocol has far more advantages than wired protocol and that is the reason why we choose the wireless protocol over wired one.
VI. UNCERTAINTY ANALYSIS AND DISCUSSION
There are two major sources of error in a typical position determination system. First, round off error due to representation of distances and intermediate computations in number system and secondly due to the uncertainty in the measurement of distances themselves. In the subseqent sections, we present our detailed analysis and techniques to minimize these errors.
A. Round-off Errors
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
[image:7.612.60.270.101.258.2]412 Figure 3: Worst case round off error in fixed-point representation for
10s of meters dimension and computing
B. Error due to Measurement Uncertainty
Another major source of error is due to uncertainty of measurement. The uncertainty in range can be from thermal noise, measurement error in TOA or error in receiver. For simplicity we lump all sources of error together and combine them with the uncertainty with the range measurement. When we accommodate the error term in every dimension we now search the intersection of hollow spheres as shown in the Figure 2.
C. Error Minimization Techniques
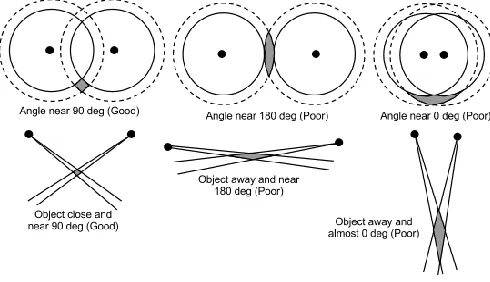
When the distance measurement is not precise then we end up with a region as oppose to single intersection point of three spheres. The distance measurements available are frequently only approximations. Fairly accurate positions can be calculated with these approximate distances by using various iterative least squares solutions procedures. Also placing the sensors are right angle from the target object reduces the uncertainty – as shown in Figure – 4(a). The two worst case senarios are when the target object is either 0 or 180 degree from the sensors.
Figure 4: Depiction of errors due to placement of sensors
D. Kalman Filter based Correction
The Kalman filter, also known as linear quadratic estimation (LQE), is an algorithm that uses a series of measurements observed over time, containing noise (random variations) and other inaccuracies, and produces estimates of unknown variables that tend to be more precise than those based on a single measurement alone. The algorithm works in a two-step process. In the prediction step, the Kalman filter produces estimates of the current state variables, along with their uncertainties. Once the outcome of the next measurement is observed, these estimates are updated using a weighted average, with more weight being given to estimates with higher certainty.
VII. COMPARISON METRICS
In order to evaluate and compare various localizations systems here are few metrics that should be considered. While we should optimize the specific metrics we should also ensure that none of these are compromised beyond a certain threshold.
A. Cost of Installation and Maintenance
There are different types of cost associated with an indoor positioning system (IPS). The main components of cost include cost of infrastructure, positioning devices, system installation, and maintenance over time. Outdoor positioning system, such as GPS, have a large infrastructure to support the location measurement which is expensive and complex. Time and space cost are also factors indicating the efforts for the operation of the IPS. Time cost involves the time requirement of system installation and the time length of the positioning system.
B. Performance
[image:7.612.49.294.540.681.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
413 For example, one system has a location precision of 90% within 2.3 m (the CDF of distance error of 2.3 m is 0.9), and 95% within 3.5 m; another one has a precision of 50% within 2.3 m and 95% within 3.3 m. We could choose the former system because of its higher precision.
C. Scalability
Scalability is defined as the number of objects that an IPS can locate within a certain amount of infrastructure devices and within a given time period. A stable IPS that can simultaneously locate a large number of objects is predefined. For example, the orientation calculation of an object is required in a motion tracking application, which needs at least three, non-collinear located targets mounted on the object to perform orientation calculation. Thus the deployed IPS needs to simultaneously locate at least three targets and offers higher scalability for the location sensing and location based application.
C. Robustness and Quality-of-Service
A robust IPS should be able to function even in some catastrophic cases such as some devices in the system are malfunctioned or a mobile devices runs out of battery energy. For example the IR positioning technique needs line of sight signal transmission between the emitters and the tags. In the Active Badge system a user wears an active Badge. If the badge is covered by his /her thick clothes, It cannot get location information from the system. Since the line of sight communication are not possible the active Badge and the emitters. Thus for those serious situations and faults in the system, the positioning system should offer at least reduced positioning services.
D. Complexity
An aspect of the complexity of IPS is about the human
intervention/efforts during the deployment and
maintenance of the IPS. For example, the WLAN based IPS reuse the existing access point of WLAN as reference locations are positioning measuring units that do not need much infrastructure installation. Another aspect of the complexity indicates the required computing time of the device carried by the user to determine his /her position. Because of the limited CPU processing and battery power of the mobile devices, an IPS uses positioning methodology with lower calculation complexity are desired.
VIII. FUTURE WORK
There are several aspects of complete system, which are still under exploration, and current investigation would try to address those.
Understanding the choices of sensors that can be used for position determination and their power, energy and performance analysis is part of future exploration. Also we are looking at the ways to implement the processing at sensor-end using fixed-point computation. The current system proposes only the location and movement tracking for Parkinson disease. Extending the whole system to various other healthcare applications such as body-fall detection of elderly people, movement tracking and fall detection of handicapped patients are interesting future research avenues.
IX. CONCLUSION
Position estimation and motion processing in 3-D space are becoming increasingly popular because they find
applications in many fields including navigation,
surveying, gaming, security, medical, etc. We studied and compared numerous motion tracking systems that can be employed in medical and healthcare applications. Such systems can bring down the cost of overall healthcare to by many orders. We also identified the impact of various communication protocols and the error introduced due to various estimation techniques.
Our analysis shows that a simple fixed-point based computation introduces only few millimetres of error in a room-size setting. This can be helpful in avoiding the use of compute intensive hardware such as CPUs and complete tracking algorithm can be implemented in low-power embedded devices at sensor-end itself. We also discussed the basic building blocks of localization systems including the choices of communication protocols, suitable sensor network, and sources of error in distance estimation.
REFERENCES
[1] D. Zhang, F. Xia, Z. Yang, L. Yao, W. Zhao, ―Localization Technologies for Indoor Human Tracking‖, in The Fifth ICFIT (FutureTech), Busan, Korea, 2010. pp. 1–6
[2] R. Want, A. Hopper, V. Falcao, J. Gibbons. ―The Active Badge Location System‖, ACM Transactions on Information Systems, Vol. 10, No. 1, January 1992, pp 91-102. (ORL Technical Report 92.1) [3] R. Azuma, ―Tracking Requirements for Augmented Reality,‖
Communications of the ACM, Vol. 36, No. 7, pp: 50-51, July 1993 [4] N. Adams, R. Gold, B. N. Schilit, M. Tso, and R. Want, ―An
Infrared Network for Mobile Computers‖, In Proceedings of the USENIX Symposium on Mobile and Location-independent Computing, pages 41-52, Cambridge, MA, August 1993.
[5] F. Bennett and A. Harter. ―Low Bandwidth Infra-Red Networks and Protocols for Mobile Communicating Devices,‖ Oracle Research Lab (ORL) Technical Report 93.5.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459,ISO 9001:2008 Certified Journal, Volume 3, Issue 7, July 2013)
414 [7] Z. Yang and Y. Liu, ―Quality of Trilateration: Confidence Based
Iterative Localization,‖ In the Proceedings of the 2008 the 28th ICDCS - vol 00 (June 17-20,2008). IEEE Computer Society, Washington, DC, 446-454
[8] A. Bahr, J. Leonard, ―Minimizing Trilateration Errors in the Presence of Uncertain Landmark Positions,‖ In Proceedings of the 3rd ECMR, Germany, Sept 2007
[9] B. Wellenhoff, H. Lichtenegger and J. Collins, ―Global Positions Systems: Theory and Practice,‖ 4th Edition, Springer Verlag 1997.
[10] A. Kelly, ―Precision dilution in mobile robot position estimation,‖ in Intelligent Autonomous Systems, Amsterdam, Holland, 2003. [11] K. Al Nuaimi, H. Kamel, ―A survey of indoor positioning systems
and algorithms,‖ Innovations in Information Technology (IIT), 2011 International Conference on, vol., no., pp.185-190, 25-27 April 2011 [12] M. Depsey, ―Indoors positioning Systems in Healthcare‖, Radianse
Inc. White paper, 2003.
[13] S. Gezici, ―A survey on wireless position estimation‖, Wireless Personal Communications, vol. 44, no. 3, pp.263-282, Feb.2008. [14] Jason W.P.Ng, ―Ubiquitous Healthcare Localization Schemes ‖, 7th
International Workshop on Enterprise networking and computing in Healthcare Industry, HEALTHCOM, June 2005, Page(s): 156-161. [15] P. Prasithsangaree, P. Krishnamurthi, and P. K. Chrysanthis, ―On
indoors position with wireless LANs‖ in Proc. IEEE Int. Symp. Pers. Indoor, Mobile Radio Commun, Sep. 2002, Vol.2, pp. 720-724. [16] C. Savarese, J. M. Rabaey, and J.Beutel, ―Locationing in distributed
ad-hoc wireless sensor networks‖ in Proc. IEEEICASSP, May 2001
[17] J. Hightower and G. Borriello, ―Location systems for ubiquitous computing ‖ Computer, vol. 34, no. 8, Aug. 2001.
[18] K. Pahlavan, X. Li, and J. Makela, ―Indoor geo-location science and technology,‖ IEEE Com. Mag., vol.40, no. 2, pp. 112-118,Feb. 2002. [19] M. Vossiek, L. Wiebking, P. Gulden, J. Wiehardt, C. Hoffmann, and
P. Heide, ―Wireless Local Positioning‖, IEEE Microwave Mag., vol. 4, Issue 4, December 2003, pp. 77-86.
[20] C. Flora, M. Ficco, S. Russo, and V. Veccio, ―Indoor and outdoor location based services for portable wireless devices‖, Proc. 25th
IEEE ICDCS Workshop, 2005.
[21] L. M. Ni and Y. Liu, ―LANDMARC: Indoor Location Sensing Using Active RFID‖, Proc. IEEE International Conference on Pervasive Computing and Communications, 2003, pp. 407-416. [22] Y. Wang, X. Jia, and H. K. Lee, ―An Indoor wireless positioning
system based on wireless local area network infrastructure‖, Proc. 6th
International Symposium on Satellite Navigation Technology Including Mobile Positioning and Location Services, 2003. [23] P. Prasithsangaree, P. Krishnamurthi, and P. K. Chrysanthis, ―On
indoor position location with wireless LANs‖, Proc. 13th IEEE Intl Symposium on Personal, Indoor and Mobile Radio Communications, September 2002.