Abstract—In this paper a new model for analyzing self-excited torsional vibrations of a heavy duty ground vehicle cardan shaft is proposed. The model considers two heavy inertias articulated by a circuit of torsional springs and a damper. The inertias of the system at either ends are driven by a gearbox through a Hooke’s joint. Traction resistance torques at road wheels and engine are projected onto the shaft through gearing transmission. The model has been used to study sensitivity of the transmission to rigid body motion, elastic deformation and stiffness perturbation of the Hooke’s joint. It is shown that, cardan shaft vibration excitations are higher at start-up and dampen away in after a short duration. Modelled results reveal that the sensitivity of stiffness to velocity and displacement inputs is higher at start-up than steady-state motion of the shaft.
Index Terms—Cardan shaft, Coupling, Nonlinear, Torsional Vibration
I. INTRODUCTION
A cardan shaft of a vehicle driveline is essential for transmitting torque from the gearbox to the final drive [1-2]. Torsion is the most prevalent type of loading in ground vehicle drivelines. Vibration of driveline systems is one of the principal causes of noise in ground vehicle transmissions [4-6]. Analysis of torsional vibration of a ground vehicle driveline is a basic and an important step in safe design of vehicle power transmission systems.
Identification of dynamic load spectra of a driveline assembly is critical in evaluating the load carrying capacity, structural integrity and maintenance of vehicle transmission [2]. A theoretical study of driveline torsional vibration was reported by Cathpole and Healy et al [7]. The research used vibration histories taken from a number of stations along the driveline, and passenger compartment noise levels recorded in a series of road tests. Application of digital analysis to the data revealed that, torsional resonances cause high noise levels in a car. In [8], acceleration vibration response of a rear driving axle caused by common excitation forces was modeled by use of Finite Element software ABAQUS.
Manuscript received March 24, 2018; revised April 13, 2018. This work was supported in part by Department of Mechanical Engineering, Vaal University of Technology, Republic of South Africa.
AA Alugongo is with the Mechanical Engineering Department, Vaal University of Technology, Vanderbijlpark 1900, Andries Potgieter BLVD, South Africa,
phone: +27788018894; fax: +27169509797; e-mail: alfayoa@ vut.ac.za.
.
Rabeih, E. and El-Demerdash, S. [8], investigated the effect of vehicle ride on the driveline vibration. Their study established that, angularity of the driveshaft and its universal joints cause torsional and bending vibrations in a driveline. In [9], driveline torsional vibration in a vehicle including a gearbox was investigated based on multibody modeling of a car taking into account flexibility of major components of the powertrain. In [10], transient characteristics of a vehicle powertrain system were investigated. The investigation compared free and forced torsional vibration of the complex test rig with that of an existing car.
This paper, presents a model for analyzing partial vibration of a driveline system. The system comprises, an elastic cardan shaft subsystem with a Hooke’s joint. The model is developed from vehicle dynamics and vibration theory. Parametric excitation due to Hooke’s joint is modelled as a perturbation of small order. The model has been used to determine fundamental torsional modes at low frequencies.
II. SYSTEM DESCRIPTION
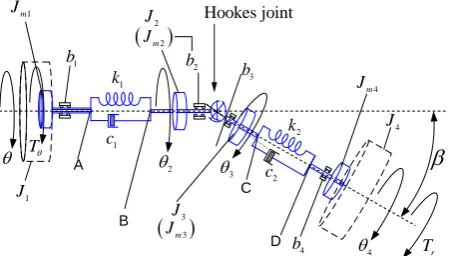
The system model in figure 1b is developed by adopting basic dynamics of a Hooke’s coupling. The model considers a simple cardan shaft whose own inertia is represented by four discrete rigid inertia disks,Jm1, Jm2, Jm3,
4
m
J mounted on two massless torsional springs, k1, k2. Inertia J1 comprisesJm1, inertias of the, parts attached to and rotating with the gearbox output shaft, inertias of the flywheel and of the parts of the engine rotating with the gearbox output shaft. J4comprises Jm4 , and inertias of the parts attached to and rotating with the final drive shaft including the road wheels.
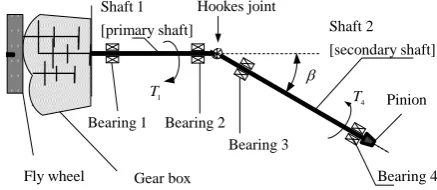
Shaft 1
[primary shaft] Shaft 2 [secondary shaft]
Bearing 1 Bearing 2 Bearing 3
Bearing 4
1
T
4
T Hookes joint
Gear box Fly wheel
[image:1.595.312.531.594.689.2]Pinion
Fig. 1 a Kinematic sketch of the cardan shaft system
Parametric Vibration of a Cardan Shaft and
Sensitivity Analysis
1 J 4 J 1 c 1 k 2 c 2 k 2 3 4 2 J C B A D 1 b 2 b 3 b 4 b 1 m J Jm2
4
m
J
3
J
Jm3
Hookes joint
r
[image:2.595.48.274.57.185.2]T T
Fig. 1b A dynamic model of cardan shaft system
The system’s d.o.f.s are lumped at the centres of the inertias J1,J2and J4 . The approach assumes small vibrations superimposed on the rigid-body motion of the gearbox output shaft. Individual inertias and their net displacements are as follows:
1
J -Rigid-body rotationonly 2
J -Elastic deformation of spring k1i.e., 1 superposed on the rigid-body rotation of J1
3
J -Net displacement of J2transmitted through the Hooke’s joint
4
J - Elastic deformation of spring k2i.e., 2 superposed on the rigid-body rotation of shaft 2 i.e. 2r
The model is developed by Lagrangian formalism. III. DISPLACEMENT OF SYSTEM INERTIA Let the net displacement of J3 be expressed as
3 2 2
(1) Where, is a perturbation parameter that depends on
and1. Consistent with the assumptions and considerations in section (2),
2 1
(2) Substitution of equation (2) into equation (1) gives
3 1 1
(3)
In automotive design, the difference between input2 and output 3motions are kept low to reduce vibration in the coupling. This is achieved by keeping a low value of , usually below 6o. Consequently,
2 3
1
1
1
1
(4)The kinematic relationship between 2, 3 and is [1],
3 2
tan tan , where cos (5) Combining equations (2), (3), (4), (5), and allowing for small angle approximation on
1
leads to
1 1 1 1 1 1 tan tan lim 1 tan (6) Making the subject in equation (6) gives
2
1
1 1
tan
tan 1
a
(7)
Where a 1
Rigid-body rotation ofJ4, 2rhas been determined by substituting, 10 in equations (3) and (7), whereupon,
2 2 1 r an n (9)
Where,ntan.
IV. SYSTEM KINETIC ENERGY
This comprises the kinetic energy of the parts of the driveline coupled to and rotating with the cardan shaft, and is expressed as
2 2
1 2 1
2
3 1 1
2 4 2 2
1 1 2 2 1 2 1 2 r
G J J
d J dt J (10.1)
Differentiating equation (10.1), assigning and performing substitutions as follows:
2 2 2 1 1 1 rd d an
dt dt cn
d an g dt cn (10.2) Where,
1
tanN ,
2 2 2 2 2 2 2 2 2 1 1 1 1 2 1 1 1 1 N N aN N N N N n n an n g n n n (11)leads to equation (12) below
2 2 21 2 1 3 1
2
4 2
1 1 1
1
2 2 2
1
1 2
G J J J
J g (12)
V. SYSTEM POTENTIAL ENERGY
This comprise the torsional strain energy between points A and B and points C and D in figure 1b and is expressed as,
22
1 1 2 1 2
1 1
1
2 2
V k k (13)
VI. THE RAYLEIGH DISSIPATION FUNCTION The Rayleigh’s dissipation function as follows:
22
1 1 2 1 2
1 1
1
2 2
d
D c c
dt
VII. THE EQUATION OF MOTION
The Lagrangian equation in an i generalized coordinate frame is
qii i i i
d G G D V
T
dt q q q q
, qi , 1, 2 (15)
Upon substitution of equations (13), (14) into equation (15), performing requisite differentiation and manipulation, the system dynamic equation reads,
1 2 1 2
1 1 1 1 2 1 1 1 1 2
2 2 1 2 2 2 2 1 2 2
1 1 1 2
2 1 2 2
1 2
1 1
2 2
0 0 0
0
0
m m m c c c
m m m c c c
m m m c c c
P
k k P
k k 1 2
1 1 1
2 1 4
gb s s s P T H R
H R T
H R T
(16)
Where, the elements of matrices in their final forms are,
2 2
1 1 1 1
2 1 1 2
2 2
2 2
1 2 3 4
4 2 2 3 4 1 1 1 1 0
m J J J J g
m m J g
m m m J J
m m m J
1 1 1 2
2 1 1 2 2 2
2
1 2 2
2
1 , 1
,
k k k k k
k k k k
(17)
1 2 2 2 1 1 22 1 1
1 1 2 1 1 1 c c c c c c (18)
1 1 11 1 2 21 2 1
1 2
2 1 1
1 1 2 1 1 1 1 1 1 c c
c c c
c c c (19) 2 2
c c , c 2 1 c 1 2, c 2 2 c2 (20)
The vectors
1 1
T
s s s
R R R
,
1 2
T
H H H
,
1 2
T P P P
correspondingly are, Hooke’s joint quadratic-velocity excited torque, Hooke’s joint elastic excitation torque (signifying elastic coupling elastic deformations across the Hooke’s joint) and the
i T q
term of
equation (15). The vectors are:
1 2
3 1 4 4 2
3 1
4
2 1 2 1
2 1
s s s
d dg
J J g J
dt dt R d R J dt R dg J dt (21)
1 2 22 1 1
2
2 2 1 1
1 1 1 0 H H k H (22)
1 2 23 1 4 2
2 3 1 1 1 4 2 2 2 1 1 1 1 G g
P J J g
G
P J
G g
P J g
(23) The terms i q
, i
g
q
in their final forms are,
2 2
2 3
1 1 2 1
2 ( 1)[(3 ) 3 1]
( 1)
0,
aN N N
N g g (24)
VIII. NUMERICAL SIMULATION AND RESULTS The system was numerical solutions of equation (16) were performed for: c1 c2 200 N.m.s.rad1
,
1 0 20 rad.sec
, k1 k2 8 10 N.m8 1
,
1 3
o
, 2 6
o
2
1 4 rad.s
a , 0.5, r0.95 m.
2 4 0
,
2
4 0.1 rad.s 1
,
0.4
,
Fig.4 : Elastic deformation of shaft 1 with gearbox displacement
Fig.5 Elastic deformation of shaft 2 with gearbox displacement
Fig.6 Rigid body displacement of shaft 2 with gear box output shaft displacement
Fig.7 Variation of equivalent stiffness with displacement gearbox output shaft
Fig.8 Variation of perturbation with displacement of gearbox output shaft
Fig.9 Variation of non-dimensional equivalent stiffness with perturbation
Fig.10 Sensitivity of nondimensional equivalent stiffness to gearbox output shaft displacement
Fig.11 Elastic-torque excited by Hooke’s between shafts 1 and 2
Fig.13 Variation of quadratic-Velocity dependent torque excited by Hooke’s joint with gearbox output shaft displacement
Fig.14Variation of quadratic-velocity dependent torque with gearbox output shaft displacement
Fig.15 Variation of quadratic-velocity dependent torque with gearbox output shaft displacement
Fig.16 Variation of quadratic-velocity dependent torque gearbox output shaft displacement
Fig.17 Variation of quadratic-velocity dependent torque with the gearbox output shaft displacement
Fig.18 Variation of dimensionless stiffness gearbox output shaft displacement
Fig.19 Sensitivity of nondimensional stiffness to perturbation parameter
Fig.21 FFT of the secondary shaft perturbation
Fig.22 Sensitivity of nondimensional equivalent stiffness to perturbation parameter
IX. CONCLUSION
A new model for analyzing self-excited torsional vibrations of a heavy-duty ground vehicle cardan shaft system has been developed. Quadratic-Velocity dependent torques excited by the coupling of kinematic anisotropy of the Hooke’s joint and the elastic motion of the primary shaft have been analyzed.Elastic-torque excited by the coupling of the primary and secondary shaft and due to change in rigid motion across the Joint manifest a significant number of excitation features in the power density and FFT spectrum of the cardan shaft.
The cardan shaft vibration excitation is higher at start-up and dampen in a short after start-up. Modelled results reveal that the sensitivity of stiffness to velocity and displacement inputs are higher at start-up than steady-state motion of the shaft.
ACKNOWLEDGMENT
The author acknowledges the Faculty of Engineering and Technology, Vaal University of Technology, South Africa, for facilitating this research.
REFERENCES
[1] A.A. Alugongo, A Nonlinear Torsional Vibration Model of a propeller shaft with a Crack-induced Parametric Excitation and a Hooke’s Joint Type of Kinematic Constrain. IEEE Africon 2011, 978-1-61284-992-8, Livingstone, Zambia, September 13-16 2011.
[2] E. Esmailzadeh and K.A. Farzaneh, Shimmy vibration analysis of aircraft landing Gears. Journal of Vibration and Control Vol. 5: p.45-56, (1999).
[3] M.R.F. Kidner and R.I. Wright, Vibration Absorbers: A Review of Applications in Interior Noise Control of Propeller Aircraft. Journal of Vibration and Control Vol.10: 1221-1237, (2005). [4] T. Otake, Prediction of Torsional Vibration
Caused by Hook's Joint in Drive Train Total Vehicle Dynanics, 1MechE XXX IV FISITA Congress, London, Vol. 1, Paper No. 925068, C389/223, pp 25-230,7-11 June (1992).
[5] H. B. Pacejka, Tyre Factors and Front Wheel Vibrations, Int. Journal of Vehicle Design, Vol. 1, No 2, p. 97-119,(1980).
[6] A.A. Alugongo, Parametric excitation and Wavelet Transform Analysis of a Ground Vehicle Propeller Shaft, Journal of Vibration and Control, DOI: 10.1177/1077546312463746145, 23 October (2012).
[7] A.P, Catchpole, S.P., Healy and D. Hotgetts, Torsional Vibrations of a Vehicle Drive Line, Journal of Mechanical Design 100(4), 644-650, October 01, 1978.
[8] Rabeih, E. and El-Demerdash, S., Investigation of the Vehicle Ride Vibration Effect on the Driveline Fluctuations, SAE Technical Paper 2002-01-3065, 2002, doi:10.4271/2002-01-3065.