Context Based Performance Review of AODV and
DSDV Protocols in Adhoc community
B.Naresh kumar1, Dr.K.Raghava Rao2
1
. Research scholar, KL University, Vijayawada 2.
Professor, Head of the WSN research group, KL University, Vijayawada
Abstract: MANETs are infrastructure less networks with the nodes having basic characteristic of mobility. The nodes in the MANET will work as both the node and a router. All the nodes can run and participate in the operations like route discovery and packet forwarding with the limited resources like battery power, bandwidth..etc. So much of research has been taken place over the routing protocols in MANETs and much stuff has been produced. But, very less work has been taken place in the comparison of routing protocols with different contexts. In this document, we would like to existing the efficiency evaluation of different redirecting methods with different situations like system with few of nodes with low flexibility and a system with more variety of nodes with more flexibility is the other. We simulated these two situations with two well-known redirecting methods AODV and DSDV with the analytics Packet Delivery Fraction (PDF), Stabilized Routing Load(SRL),and Average End to End Delay(E2E)
Keywords: MANETs, Routing, AODV, DSDV, NS2
1.INTRODUCTION:
The mobile ad-hoc network[1] used in this work is a system established without any central management, made up of mobile nodes that use wireless hyperlinks to deliver data. The nodes in an ad-hoc system can act as both wireless routers and serves, thus a node may forward packets between other nodes as well as run customer programs. Mobile ad-hoc systems have been the concentrate of many latest research and growth initiatives. Ad-hoc systems have so far mainly involved army programs, where a decentralized system settings is an surgical advantage or even a requirement. Networks using ad-hoc settings ideas can be used in many army programs, which range from connected wireless access points to systems of wireless gadgets taken by individuals, e.g., digital charts, receptors connected to the body, speech interaction, etc. Incorporation of wide variety and brief variety ad-hoc systems aim to provide effective, international protection, even during negative working circumstances.
In the professional industry, equipment for wireless networks, mobile Computing has not been available at a price eye-catching for larger marketplaces. However, as the potential of mobile computer systems improves continuously, the need for un-tethered social media is predicted to increase as well. Commercial ad-hoc systems could be used in situations where no facilities (fixed or cellular) is available. Illustrations, save functions in distant areas, or when local protection must be implemented quickly at a distant growth site. Ad-hoc systems between laptop or palmtop computer systems could be used to
distribute and discuss information among the members of a meeting. Short variety ad-hoc systems can make simpler intercommunication of various mobile phones (e.g., a mobile telephone and a PDA) by removing the boring need for wires. The latter case could also increase the flexibility offered by the set system (e.g., Mobile IP) to nodes further out in an ad-hoc system sector.
Since the network nodes are mobile, an ad-hoc network will typically have a dynamic topology which will have profound effects on network characteristics. Network functions such as routing, address allocation, authentication, and authorization must be designed to cope with a dynamic and volatile network topology. Network nodes will often be battery powered, which limits the capacity of CPU, memory, and bandwidth. This will require network functions that are resource effective. Furthermore, the wireless media will also affect the behaviour of the network due to fluctuating link bandwidths resulting from relatively high error rates.
1.1 Routing protocols:
Since the advent of Defence Advanced Research Projects Agency (DARPA) packet radio networks in the early 1970s, numerous protocols have been developed for ad hoc mobile networks. Such protocols must deal with the typical limitations of these networks, which include high power consumption, low bandwidth, and high error rates [2]. Routing as such involves two basic steps. Firstly, finding the most appropriate path between the source and destination via certain intermediate nodes and secondly, the transfer of data packets using this path. Depending on the manner in which these two steps are contemplated, as mention earlier, routing has been classified as
1.1.a. Proactive routing
In proactive routing fresh lists of destinations and their routes are maintained by periodically distributing routing tables throughout the network [3]. Here routing information is computed and shared and the path is set prior to the actual transfer of data packets between the source and destination. In the proactive routing scheme we are able to conveniently send the data packets across as everything is planned before hand. But, it requires that each and every node in the network have the capacity to store all the routing information. Also, if the network changes its topology very rapidly our planning may fail. Examples of these kind protocols are OLSR, DSDV, and CGSR etc.
1.1.b. Reactive routing
initiates the data transfer process by issuing a route request, the most relevant immediate neighbour issues a route reply to this request and takes forward the data transfer process. This happens till the destination is reached and the data packet received [4]. In the reactive routing scheme we are able to overcome all shortcomings of the proactive routing scheme. But, this scheme may suffer from high latency time for finding routes. Also, excessive flooding may lead to network clogging. Examples of these kind protocols are AODV, AOMDV, DSR, TORA and CBRP etc.
The rest of the paper consists of Protocol description in section 2, Simulation environment in section3, simulation study of AODV and DSDV in three scenarios in section 4, and conclusion & future scope in section5.
2. PROTOCOL DESCRIPTION:
DSDV [4] is a hop-by-hop range vector redirecting method. It is proactive; each system node preserves a redirecting table that contains the next-hop for, and variety of trips to, all obtainable locations. Regular shows of routing updates make an effort to keep the redirecting desk absolutely updated at all periods. To assurance loop-freedom DSDV uses a idea of series figures to indicate the quality of a direction. A direction R is regarded more positive than R’ if R has a higher series variety or, if the tracks have the same series variety, R has reduced hop-count. The series variety for a direction is set by the location node and improved by one for every new coming direction marketing. When a node along a direction finds a damaged direction to a location D, it ad-vertises its direction to D with an unlimited hop-count and a series variety improved by one. Route circles can happen when wrong redirecting details is existing in the system after a modify in the system topology, e.g., a damaged weblink. In this perspective the use of series figures adjusts DSDV to a powerful system topology such as in an ad-hoc system. DSDV uses activated direction up-dates when the topology changes. The transmitting of up-dates is late to existing a damping impact when the topology is modifying fast. This gives an extra variation of DSDV to ad-hoc systems.
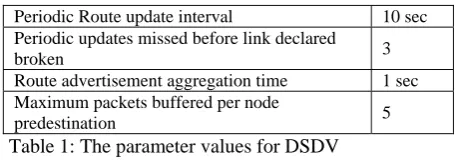
The parameter principles used for DSDV in the models are given in Table 1
Periodic Route update interval 10 sec
Periodic updates missed before link declared
broken 3
Route advertisement aggregation time 1 sec Maximum packets buffered per node
predestination 5
Table 1: The parameter values for DSDV
2.2 Ad-hoc On Demand Distance vector –AODV
AODV [5, 6] is a range vector redirecting method, like DSDV, but it is sensitive rather than practical like DSDV. That is, AODV demands a direction only when required and does not need nodes to maintain tracks to locations that are not interacting. The process of finding tracks is referred to as the direction purchase therefore. AODV uses sequence numbers in a way just like DSDV to avoid redirecting circles and to indicate the quality of a direction. Whenever a node needs to find a direction to another node
it shows a Route Demand (RREQ) concept to all its neighbors. The RREQ concept is filled through the system until it gets to the location or a node with a fresh direction to the location. On its way through the system, the RREQ concept triggers development of short-term direction desk records for the opposite direction in the nodes it goes. If the location, or a direction to it, is found, the direction is created available by unicasting a Route Response (RREP) concept returning to the resource along the short-term opposite direction of the obtained RREQ concept. On its way returning to the resource, the RREP concept triggers development of redirecting desk records for the location in advanced nodes. Routing desk records end after a certain time-out period. Neighbours are recognized by regular HELLO details (a special RREP message). If a node x does not get HELLO details from a neighbor y through which it delivers traffic, that weblink is considered damaged and a weblink failing sign (a activated RREP message) is sent to its effective Neighbours. The latter represents the Neighbours of x that were using the damaged weblink between x and y. When the weblink failing details gradually reach the impacted resources, these can choose to either stop delivering data or to request a new direction by delivering out new RREQ details. The execution of AODV created within this research brings together HELLO details with details from the MAC part to identify weblink problems, which results in faster failing recognition. DSR uses identical methods. The HELLO period was also improved to 1.5 a few moments since the method now gets more details from the weblink part. Moreover, the AODV execution used in this research has a deliver shield of 64 packages, which is not specified in [7]. The deliver shield, in the delivering node, shops confident packages until the direction purchase process acquires a direction to their location. The AODV requirements does not need a deliver shield, but it is required to obtain a reasonable evaluation with DSR which does specify a deliver shield. The highest possible time to keep packages in the deliver shield was set to 8 a few moments, which was a heuristically identified value based on a sequence of initial models. Some of the factors used in the simulator was a little bit customized as opposed to ones used in [8] and the ones specified by [9]. The Route reply life-time was set to coordinate the Active direction timeout value. The Time between retransmitted demands was set to fit the opposite direction life-time (3 seconds) since it should be possible to retransmit a request as soon as the opposite direction has terminated. To save data transfer useage, the regularity of activated RREP details was restricted to one every second.
The parameter values used in the simulations are given in Table 2.
Hello packet interval 1.5 sec
Max Hello packet Loss 2
Max RREQ attempts 3
RRPLY validity 300 sec
Active route timeout 300 sec
Packet life time in queue 10sec
Duration between Retransmitted requests 3sec Max rate of sending replies in a route 1/sec
3.SIMULATION ENVIRONMENT
After establishing up the system, UBUNTU here, a application known as ns2 was set up on it which was used for all the analysis and simulation work apart from other resources used. ns2 is the de facto conventional for system simulation. Its behavior is extremely reliable within the social media group. It is designed at ISI, Florida, and is reinforced by the DARPA and NSF.
ns2 is an item focused simulation, published in C++, with an OTcl translator as a front side end. This implies that most of the simulation programs are designed in Tcl. If the elements have to be designed for ns2, then both tcl and C++ have to be used.ns2 uses two 'languages' because any system simulation, in common, has two different types of things it needs to do. On the one side, specific models of methods needs a techniques development terminology which can effectively operate bytes, bundle headers, and apply methods that run over huge information places. For these tasks run-time rate is essential and turn-around time (run simulation, find bug, fix bug, recompile, re-run) is less essential. However, most of system analysis includes a little bit different factors or options, or easily discovering a number of circumstances. In these situations, version time (change the design and re-run) is more essential. Since settings operates once (at the starting of the simulation), run-time of this aspect of the process is less essential [10]. ns2 satisfies both of these needs with two 'languages', C++ and Otcl. C++ is quick to run but more slowly to modify, creating it appropriate for specific method execution. Otcl operates much more slowly but can be modified very easily (and interactively), creating it perfect for simulation settings
.
Fig.1 An illustration of working of NS2
4.SIMULATION RESULTS:REAL TIME CONTEXTS In order to examine how the redirecting methods execute in less synthetic circumstances than unique activity, three “realistic” circumstances were developed and simulated. The circumstances are
a) Meeting, with low mobility
b) Occasion Protection, with pretty high flexibility.
c) Catastrophe Area, with some relatively slowly nodes and some very quick nodes (vehicles).
The titles of the circumstances make an effort to classify them and should not be developed as accurate explanations. The factors typical to all models are given in Desk 5.
Parameter Conference Event Coverage &
Disaster Area
Transmission Range 50m 300m
Bandwidth 5mbps 5mbps
Number of nodes 30 50
Simulation time 900sec 900sec
Area 150X90m 1500X900m
Traffic CBR CBR
Packet rate 4 packets/sec 4 packets/sec
Packet size 512 byte 512 byte
Speed of node 1 m/s 1m/s
Table5:Parameters related to all simulations
Low-power radios used for indoor communication generally cannot propagate signals through walls, doors, and alternative obstacles during a building, while not severe attenuation. Similar conditions might exist in an outside situation, wherever objects within the parcel of land, like buildings, cars, etc. might shadow radio transceivers. so as to induce vital ends up in a simulation claiming to be realistic, obstacles to radio propagation ought to be sculptures. Consequently, the aptitude to model obstacles one was added to the simulation tool. This feature permits the location of obstacles within the kind of boxes among the moving nodes. If the line between any two nodes area unit crossed by Associate in Nursing obstacle, a link between these nodes is taken into account broken till the nodes move out of the shadowy space (the line isn't crossed). A lot of realistic model would come with radio signals penetrating a number of the objects solely part absorbed further as mirrored radio signals. However, this easy model could be a first approximation only that assumes totally gripping objects.
5.1 Conference scenario
The meeting situation models 50 guests in a meeting, conference period, or a similar activity as shown in Figure 2. It contains 2 CBR resources and 6 devices leading to 6 CBR moves. Three areas can be recognized in the scenario: 1) the presenter area where the presenter goes back and forth and regularly changes her/his nearest neighbor in the viewers, 2) the viewers area where individuals are rather fixed, when someone goes a long-lived path might break, 3) the entry area where interested individuals outside-the room set up tracks to the presenter to try to decide, based on the recovered information, if they should be a part of the period or not.
The meeting situation has rather low flexibility as only 10 % of the nodes are shifting at any point soon enough. The tracks generally include many trips and the visitors is focused to the presenter. Due to great node solidity, there will be relatively great stereo disturbance. The objective of this situation is to analyze responsiveness to regional changes of long-lived tracks. Furthermore, the low flexibility along with the visitors focus will pressure blockage qualities.
The outcomes stand up proven in Desk 6. The measured mobility for this situation is very low. AODV and DSR execute quite well, they provide 94 to 98 % of the packages with a normal throughput of 15.0 - 15.7 kilobytes per second. DSDV provides only 75.6 % of the packages with a normal throughput of 12.1 kilo bytes per second. This indicates that an ad-hoc redirecting protocol must adjust easily to topology changes even for long-lived routes.
Table 6:Simulation results of Conference scenario
5.2 Event coverage
The occasion protection situation, portrayed in Figure 3, designs a number of 50 extremely mobile people which are frequently modifying position. It may signify a number of journalists that are protecting a governmental occasion, an activity occasion, or companies. There are 9 CBR resources and 45 devices, providing 45 CBR moves. The situation has a rather high flexibility in that at any time 50 percent of the nodes shift with a rate of 2 m/s. Groups made up of around 10 nodes is established automatically in the system as the nodes shift. The tracks involve relatively few trips and are generally temporary. Since the simulator place has many challenges, disturbance is rather low unless clusters are established The purpose with this situation was to test the capability to react to fast topology changes and varying visitors. Moreover, the expense due to regular topology changes was also of interest. The visitors was deliberately distribute out all over the place to prevent crowded nodes in this situation.
Figure 3:Event coverage context
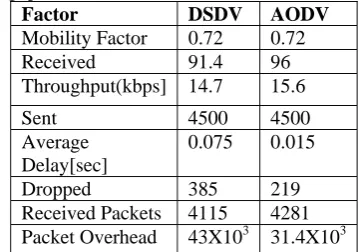
The outcomes from the models are provided in Desk 7.All methods have pretty great throughput, with DSR and AODV executing best. The occasion protection situation has a pretty low flexibility (0.72) due to the low rate (I m/s) of the shifting nodes. The visitors is usually crossing only a few trips (on regular 1.5). The brief routes outcome in low byte expense for DSR since the resource tracks in information packages are brief (160 kB expense in comparison to over 4 MB for the meeting scenario).
AODV gives a wait almost a scale reduced than DSR with approximately the same throughput. This is a beneficial impact of the HELLO concept process in AODV, which gives an a priori information of the Neighbors. It suits perfectly in this situation since the location of a bundle sent in a group is often a neighbor. The path purchase process need not be invoked, which helps you to save your time. An entirely practical method like DSDV may have huge expense due to regular complete topology up-dates, which also add additional fill to the system. In this situation the provided visitors fill was low so DSDV had a pretty great throughput and low wait.
Factor DSDV AODV
Mobility Factor 0.72 0.72
Received 91.4 96
Throughput(kbps] 14.7 15.6
Sent 4500 4500
Average Delay[sec]
0.075 0.015
Dropped 385 219
Received Packets 4115 4281 Packet Overhead 43X103 31.4X103
Table 7: Simulation results for Event coverage scenario
5.3 Disaster area
The following figure depicts the scenario of a disaster management
Figure 7:disaster area scenario
The disaster place situation is designed at comprising a save function at a organic catastrophe place. Associates of the save group have personal communicators with ad-hoc system ability. The field, portrayed in Determine 16, includes three categories that can intercommunicate only via the nodes installed on automobiles 1 and 2 (helicopters, vehicles etc.). The automobiles are shifting back and forth at 20 m/s, while the other nodes (people) shift more
Factor AODV DSDV
Packets sent 21510 21510
Packets received(%) 94 75
Average hop-count 6.45 5.32
Byte overhead[MB] 2.11 6.41
Packets overhead 54X103 44X103
Received packets 20.1X103 16.3X103
Mobility Factor 0.04 0.04
gradually (I m/s) and arbitrarily within each group. There are 38 CBR resources with 87 devices for a complete of 87 CBR moves. You will of this situation consist of different mobilities (95 % of the nodes have low flexibility and 5 % very high) and several system dividing activities. Thus it provides a way to research how the methods act when node rates of speed are different and when the system categories and cures. Throughput is calculated only when the CBR moves are actually being obtained to be able to demonstrate the efficiency when the system is not portioned. This describes the seeming distinction between throughput and the portion of obtained packages. Outcomes are proven in Desk 8. Due to the system dividing activities, less than 55 % of the deliverable provided visitors is provided. DSDV only provides about 30 % of the visitors, which is a obvious sign that practical methods should not be used under these circumstances. DSDV has the smallest wait, mainly due to its low distribution ratio; packages are decreased instead of queued. AODV has a little bit reduced wait than DSR because the HELLO procedure provides tracks to neighbor nodes instantly. The rather huge hop-count outcome in significant expense for DSR because the resource tracks become relatively huge. DSDV discovers the quickest routes, just like in the other genuine circumstances, but the distinction is more emphasized here. However, DSDV falls a huge number of packages due to incorrect tracks, which must be taken into consideration. The quick modifying tracks through the quick (vehicle) nodes are needed for inter-group visitors and are pretty long. DSDV cannot adjust well to such quick path changes and thus the tracks discovered by DSDV are relatively short
Factor DSDV AODV
Mobility Factor 1.16 1.16
Received 29.5% 54.0%
Throughput[kbps] 12.42 14.09
Sent 29.6X103 29.6X103
Average delay[sec] 0.196 0.988
Dropped 20.9X103 13.6 X103
Received packets 8.8 X103 77.3 X103
Byte overhead[MB] 6.50 3.10
Table 8: Simulation results for Disaster area scenario
From all the above we can observe the following results
METRIC AODV DSDV
Throughput 4027.39kbps 5056.58 kbps
END to END Delay 0.0153 1.7958
Packet DeliveryFraction 0.9985 0.9205
Overhead 1.0 22.26
Table9: Comparisons between DSDV and AODV.
6 CONCLUSION AND FUTURE SCOPE:
This research clearly indicates that a sensitive redirecting method is excellent to a practical one. The most essential of concentrating only on clearly needed connection, and not all connection, seems to be excellent when the system includes moving nodes. Moreover, the method should be able to identify link problems as quickly as possible to
avoid use of incorrect tracks. Overall, the practical methods under research (AODV and DSR) were in the same way with regards to wait and throughput. On the reasons for this research both should be regarded appropriate for mobile ad-hoc systems. However, a variety of variations between the methods are available.
The resource tracks used by DSR give improved byte expense in comparison to AODV when tracks have many trips and bundle rates are great. DSR is, however, effective in finding (learning) tracks with regards to the variety of management packages used, and does not use regular management information. Information packages in AODV carry the location deal with only, and not resource tracks. Therefore, the byte expense for AODV is the smallest of the examined methods. The expense is however great with regards to packages since AODV shows regular HELLO information to its Neighbors, and needs to deliver management information more frequently than DSR to find and repair tracks. The models in this execute show that DSR works better than AODV for low visitors plenty, since it finds tracks more effectively. At higher visitors plenty, however, AODV works better than DSR due to less additional fill being enforced by resource tracks in data packages. The genuine circumstances were examined to get an knowing on how the methods would act in an atmosphere more genuine than the unique circumstances. The outcomes validate most of the qualities found in the unique circumstances.DSDV had significant complications in managing most circumstances even though the flexibility was kept rather low. The meeting situation and event protection circumstances were handled very well by both DSR and AODV, with DSR generally offering a little bit better performance. The plenty were rather low and did not bring out the byte expense drawback of DSR. The catastrophe place situation was a task for all methods since most tracks approved through fast nodes and hyperlinks were often hidden by things. DSR and AODV handled to provide about 55 % of the visitors while DSDV only provided 30 %. It should be mentioned, however, that the catastrophe situation showed regular dividing of the system. Both DSR and AODV conducted quite well for almost all examined circumstances, while DSDV had serious performance problems. As a initial suggestions, DSR should be regarded for ad-hoc systems where routes have a small variety of trips and where it is essential to restrict bundle expense. AODV however seems to execute better in systems where routes have many trips and low byte expense is recommended over low bundle expense. In this execute, two ad hoc redirecting methods i.e. AODV and DSDV have been examined and in comparison, the outcomes of which could be useful in many circumstances. However there are other methods also in MANETs such as TORA, ZRP, INSIGNIA etc. The future opportunity is the comprehensive evaluations between the above said methods.
REFERENCES:
[1] Md. Monzur Morshed, Md. Habibur Rahman, Md.Rezaur Rahman Mazumder, and K. A. M. Lutfullah,“Simulation and Analysis of Ad-hoc on demand Distance Vector Routing Protocol,” ICIS 2009, vol. II, pp. 610- 614, November 2009.
[2] Valid Nazari Talooki, and Jonathan Rodriguez, “Quality of Service for Flat Routing Protocols in Mobile Ad-hoc Network,” ICST, 7-9 September 2009.
[3] V. Ramesh, Dr. P. Subbaiah, N. Koteswar Rao and M. Janardhana Raju, “Performance comparison and analysis of DSDV and AODV for MANET,” International Journal on Computer Science and Engineering, vol. 02, pp. 183-188, 2010.
[4] Charles E. Perkins, Elizabeth M. Belding-Royer, and Samir R. Das, “Ad hoc On-Demand Distance Vector Routing,” IEFT MANET Draft, Charles E. Perkins, Ad Hoc Networking, ISBN 0-201-30976-9 February 2003.
[5] S H Manjula, C N Abhilash, Shaila K, K R Venugopal, and L M Patnaik, “Performance of AODV Routing Protocol using Group and entity Mobility Models in Wireless Sensor Networks,” In
proceedings of the International Multi Conference of Engineers and Computer Scientists (IMECS 2008), Hong Kong, vol. 2, pp. 1212-1217, 19-21 March 2008.
[6] V. Kanakaris*, D. Ndzi and D. Azzi., Ad-hoc Networks Energy Consumption: A review of the Ad- Hoc Routing Protocols, Journal of Engineering Science and Technology Review 3 (1) (July 2010) [7] S. Giannoulis, C. Antonopoulos, E. Topalis, S. Koubias, ZRP versus
DSR and TORA: A comprehensive survey on ZRP performance, IEEE Transactions on Industrial Informatics Vol. 3, No. 1, pp. 63-72 (Feb. 2007).
[8] D. Maltz, Y. Hu, The Dynamic Source Routing Protocol for Mobile Adhoc Networks, Internet Draft, Available: http://www.ietf.org/internetdrafts/draftietfmanet- dsr-10.txt, July 2004.
[9] C. Perkins and E. Royer, Ad Hoc On-demand Distance Vector (AODV) Routing, Internet Draft, MANET working group, draft-ietf-manetaodv- 05.txt, March 2000.