Classification for Moving Object Detection and Tracking
Multiple Sensor Fusion
Miss. Ankita Bhanse
1, Mrs. Prof. S. S. Vasekar
21
PG student, 2Assistant Professor
1,2
VLSI and Embedded system, Department of electronics and communication SKNCOE Vadgaon (BK), Pune (India)
ABSTRACT
The precise detection and order of moving objects is a basic part of advanced driver assistance systems. This
framework trusts that by including the object arrangement from different sensor detection as a key part of the
object's portrayal and the observation procedure. In this paper we improve the perceived model of environment.
First, we define the object representation along with the classification and second, we gives a complete fusion
framework to solve the detection and tracking of moving object. Vehicle recognition is made out of two primary
undertakings: simultaneous localization and mapping (SLAM) which produces a guide of the environment while
all the other restricting the vehicle inside the guide given every one of the measurements from sensors; and
DATMO which identifies and tracks the moving objects surrounding the vehicle and evaluations their future
conduct.
Keywords- ADAS system, intelligent vehicles, classification algorithms, sensor fusion, vehicle
detection, vehicle safety.
I. INTRODUCTION
ADAS help drivers to perform complex driving errands to maintain a strategic distance from dangerous circumstances. Assistance errands include: cautioning messages in dangerous driving circumstances (e.g., conceivable crashes), initiation of wellbeing gadgets to relieve up and coming impacts, autonomous maneuvers to stay away from snags, and consideration less driver notices. Seeing nature includes the determination of various sensors to get a point by point portrayal of the earth and a precise recognizable proof of the objects of intrigue. Vehicle recognition is made out of two principle undertakings: simultaneous confinement and mapping (SLAM) which creates a guide of nature while simultaneously limiting the vehicle inside the guide given every one of the estimations from sensors; and DATMO which identifies and tracks the moving objects surrounding the vehicle and assessments their future conduct.
Figure 1 demonstrates the principle parts of the discernment assignment. This chart contains general engineering of the discernment errand and its two fundamental segments: SLAM and DATMO[1]. Observation gives a model of the earth generally made by the vehicle's area, guide of static objects, and a rundown of moving objects. Management of deficient data is an important prerequisite for discernment systems. Deficient data can be begun from sensor-related reasons, for example, adjustment issues, equipment breakdowns, unverifiable detection and asynchronous scans; or from scene perturbations, similar to occlusion, climate issues and object moving.
Fig. 1. General Architecture of the Tracking Task With SLAM and DATMO.
II.DATADESCRIPTION
In this research we have used the camera sensor dataset to estimate our proposed method.
A. Camera images
It is most utilized sensor. This is utilized as a part of different mechanical technology and observation system. Camera sensor diminishes the issue in recognize the development of both the sensor and object by consolidating the both movements in the single camera.
The camera sensor information gives an arrangement of ROI (Region of Interest) which we use potential results for time. For theory of affirmation, we use the built separated classifiers to describe the particular objects. The camera-based grouping makes a couple sub areas inside each ROI to cover various possible scale and size arrangements. All over a ROI can contain more than one object of interest. When we have gotten the object order for each ROI, we make a fundamental conviction errand.
III.METHODS
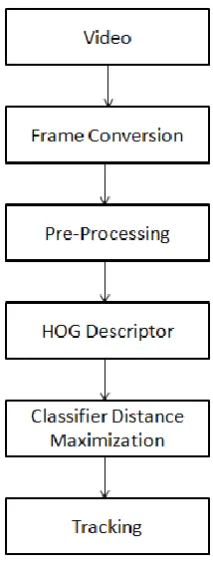
The entire outline and advancement done in three stages:
Is an iterative strategy to discover most extreme probability or greatest a back (MAP) appraisals of parameters in factual models, where the model relies on upon imperceptibly objects. This method successfully minimizes the distance between the desired objects.
C. HOG
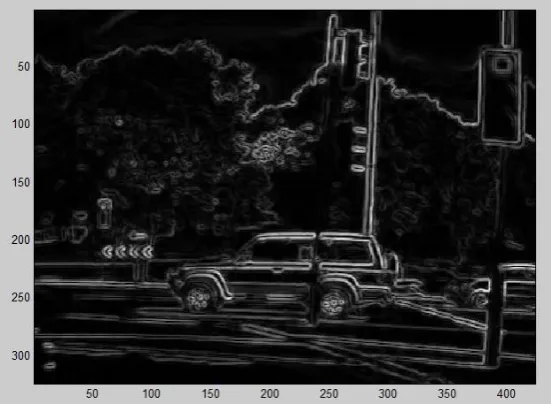
The histogram of oriented gradients (HOG) is a feature descriptor utilized as a part of PC vision and image preparing with the end goal of protest detection. The procedure includes events of gradient orientation localized parts of an image. The essential thought behind the histogram of oriented gradients descriptor is that local question appearance and shape inside an image can be portrayed by the distribution of force gradients or edge directions.
Fig. 2. Processing levels of proposed system.
IV.FUSIONARCHITECTURE
The fusion theories described in past areas are at the center of numerous cutting edge multi-sensor fusion methods. The usage of these hypotheses is situated at various stages inside the multi-sensor fusion frameworks. A. Object detection level.
Sensor forms give arrangements of moving item in the environment, then fusion is performed between these rundowns to get an improved rundown objects. Fusion at this level can lessen the quantity of mis-detections. B. Track level.
Arrangements of moving items distinguished and track end over circumstances by individual sensors are combined to deliver the final rundown of tracks. Fusions at this level can decrease false tracks. Low level and guide level fusions are performed inside the SLAM part, while protest detection level and track level fusions are performed inside the DATMO segment.
Fig. 3. Fusion levels inside the SLAM and DATMO segments connection.
V.EXPERIMENTALRESULTS
The multiple sensor fusion system performs on the video sequences which we are getting from the different sensor available in our system. This system shows the successful results in the specific levels as given below;
Figure 5. Feature extraction with HOG descriptor.
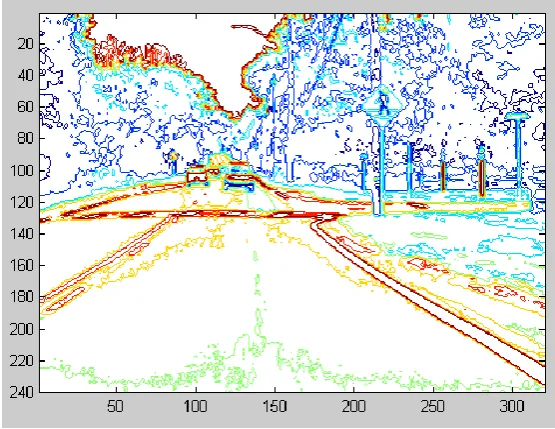
Figure 6. Result showing the intensity of objects.
VI.CONCLUSION
This framework beats the issue of data fusion for multi-sensor frameworks; and the most widely recognized methods to perform fusion in the vehicle observation fields are portrayed. Incorporating class data at the detection level enabled the fusion to enhance the detection. The change straightforwardly lessens the quantity of false detections and false classifications at early phases of DATMO part.
REFERENCES
[1] Ricardo Omar Chavez-Garcia and Olivier Aycard, “Multiple Sensor Fusion and Classification for Moving Object Detection and Tracking,” IEEE Transactions On Intelligent transportation systems, Vol. 17, No. 2, Feb. 2016.
[3] F. Garcia, P. Cerri, A. Broggi, A. Escalera, and J. M. Armingo, “Data fusion for overtaking vehicle detection based on radar and optical flow,” in Proc. IEEE Intell. Veh. Symp., 2013, pp. 494-499.
[4] C. Mertz et al., “Moving object detection with laser scanners,” J. FieldRobot., vol. 30, no. 1, pp. 17–43, Jan. 2012
[5] Q. Baig, “Multisensor data fusion for detection and tracking of moving objects from a dynamic autonomous vehicle,” Ph.D. dissertation, Lab. Inf. Grenoble, Univ. Grenoble, Grenoble, France, 2012.
[6] P. Dollár, C. Wojek, B. Schiele, and P. Perona, “Pedestrian detection: An evaluation of the state of the art,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 34, no. 4, pp. 743–61, Apr. 2012.
[7] D. Santos and P. L. Correia, “Car recognition based on back lights and rear view features,” in Proc. IEEE Workshop Image Anal. Multimedia Interactive Serv., 2009, pp. 137-140.