An Integrated Full-Wave CMOS Rectifier With
Built-In Back Telemetry for RFID and
Implantable Biomedical Applications
Maysam Ghovanloo
, Member, IEEE
, and Suresh Atluri
, Member, IEEE
Abstract—This paper describes the design and implementation of an integrated full-wave standard CMOS rectifier with built-in passive back telemetry mechanism for radio frequency identifica-tion (RFID) and implantable biomedical device applicaidentifica-tions. The new rectifier eliminates the need for additional large switches for load modulation and provides more flexibility in choosing the most appropriate load shift keying (LSK) mechanism through shorting and/or opening the transponder coil for any certain application. The results are a more robust back telemetry link, improved read range, higher back telemetry data rate, reduced rectifier dropout voltage, and saving in chip area compared to the traditional topolo-gies. A prototype version of the new rectifier is implemented in the AMI0 5 m n-well 3-metal 2-poly 5 V standard CMOS process, occupying 0 25mm2 of chip area. The prototype rectifier was powered through a wireless inductive link and proved to be fully functional in its three modes of operation: rectification, open coil (OC), and short coil (SC).
Index Terms—Back telemetry, CMOS, full-wave rectifier, im-plantable biomedical devices, inductive coupling, load shift keying, radio frequency identification (RFID), wireless.
I. INTRODUCTION
R
ADIO FREQUENCY identification (RFID) systems and implantable microelectronic devices (IMD) are two major categories of devices that inductively communicate with a reader over a short distance through a pair of loosely coupled coils, which constitute a transformer [1]–[11]. Contactless data transmission from the data-carrying device, also known as transponder, to the reader is one of the key functions, called back telemetry. It is also used in wireless sensing technology, where direct electrical contact to the sensing element is not feasible such as in tire pressure monitoring [12]. What is in common in these applications is the extreme limitation in size, which eliminates the use of a power source within the transponder especially when combined with the need for long term usage. A viable solution is to inductively power upManuscript received May 7, 2007; revised October 5, 2007. First published April 18, 2008; current version published November 21, 2008. This work was supported in part by the Department of Electrical and Computer Engineering, North California State University, Raleigh, NC 27695 USA. This paper was recommended by Associate Editor P. Heydari.
M. Ghovanloo is with the GT-Bionics Lab, School of Electrical and Computer Engineering, Georgia Institute of Technology, Atlanta, GA 30308 USA (e-mail: [email protected]).
S. Atluri is with Integrated Device Technologies Inc., San Jose, CA 95138 USA (e-mail: [email protected]).
Digital Object Identifier 10.1109/TCSI.2008.924877
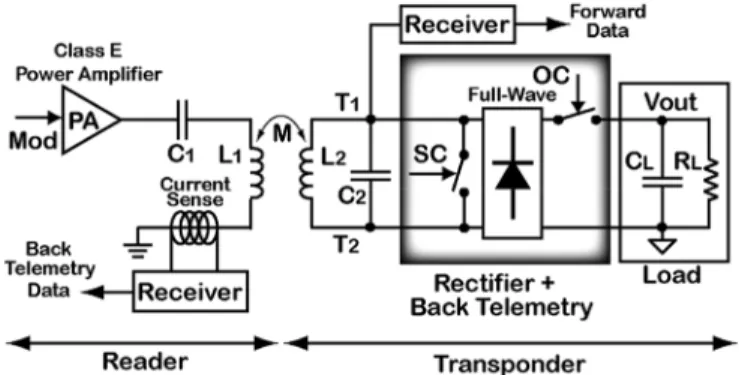
Fig. 1. Simplified block diagram of an inductively powered RFID or im-plantable microelectronic device (IMD).
the device via the same telemetry link that is setup for data transmission. As a result, the data communication and power handling blocks in RFID/IMD systems are highly intertwined and should be designed and developed together [1].
Fig. 1 shows a simplified block diagram of an RFID/IMD system. Power and data transmission take place across the inductive link formed by the primary and secondary coils on the reader and transponder sides, respectively. A power amplifier (PA) drives by a large sinusoidal signal, known as power carrier, at specific frequencies dedicated to RFID/IMD applications in the Industrial-Scientific-Medical (ISM) band [13]. and a series capacitor, , can form an oscillating tank circuit and become part of a class-E PA, which is a popular topology for RFID/IMD applications since it can theoretically reach power efficiencies up to 100% [14], [15]. It is possible to modulate the amplitude, frequency, or phase of the power carrier by applying a modulating signal (MOD) to the PA and detecting these changes on the transponder side. Therefore, MOD can be used to transmit commands along with power from the reader to transponder, a function that is usually referred to as forward telemetry [16].
Only that part of the electromagnetic flux generated by which passes through can participate in inducing current in
and powering the transponder. This is characterized by the coils mutual coupling , which is dependant on the coils ge-ometry, relative distance, orientation, and magnetic properties of the medium (air, tissue, or ferrite core) [16]–[18]. A capac-itor is usually added in parallel to in order to form a sec-ondary tank circuit, tuned at , in order to boost the received voltage and improve the efficiency. To convert the received ac
Back telemetry can be performed in two ways: active and passive. In active back telemetry, which is used when there is a high volume of data to be sent to the reader at high rate, the transponder is equipped with a transmitter and a dedicated antenna operating at a frequency often much higher than [20]. The high-power consumption of the transmitter and the space needed for its circuitry and antenna, however, disfavor active back telemetry in most applications where lower data rates are acceptable. Passive back telemetry is possible by load modulation, also known as load shift keying (LSK), which is the most common technique for data transmission from RFID/IMD transponders back to the readers by a large margin [1], [10]. In this method, the loading of the transponder coil ( in Fig. 1) is varied with the outgoing serial data stream, altering the impedance seen through due to the coils mutual coupling, . The impedance change can either be resistive or capacitive, resulting in amplitude shift keying (ASK) or phase shift keying (PSK) of the back scattered signal [21]. In the rest of this paper we will focus on the ASK.
It is desired to establish a robust back telemetry mechanism that can handle a large enough distance between the reader and transponder, known as the reading range or interrogation zone. Depending on the application, a large reading range also means that the system is robust enough to handle a certain degree of coils misalignments, motion artifacts, nearby metallic objects, and external electromagnetic noise and interference. The dynamic reading range of the RFID/IMD systems depends on detectability of the LSK impedance changes above the noise and interference levels on the reader side. This in turn depends on the coils mutual inductance , unloaded quality factors , and magnitude of the transponder load variations as a result of load modulation. To achieve a large reading range, we would like to compensate the effect of small
with the other parameters. In this paper, we assume that and , which are mainly determined by the coil designs, are already optimized. Thus, our goal is to maximize such that it can be easily detected.
Load modulation in current designs depends on the nom-inal loading of the transponder coil. In low power RFID appli-cations, where is large, a parallel MOS switch shorts ahead of a rectifier for a short period of time [1]. Alternatively, a parallel switch can inflict impedance changes by altering the configuration of the rectifier from full-wave to half-wave and vice versa, as explained in [10]. In medium and high power RFID/IMD applications, where tends to be small, a series MOS switch is being used after a full-wave rectifier toopenthe load [11]. In complex RFID/IMD systems, however, could itself be a highly variable parameter depending on the state of the transponder while being interrogated. For example, the idle current consumption of a multichannel implantable micros-timulating system, used in auditory or visual prostheses, might be negligible compared to its current consumption when mul-tiple stimulating channels are simultaneously active [22], [23]. Therefore, shorting or opening alone may not provide a large enough in all conditions, degrading the nominal reading range. Further, the load modulation MOS switches, which have
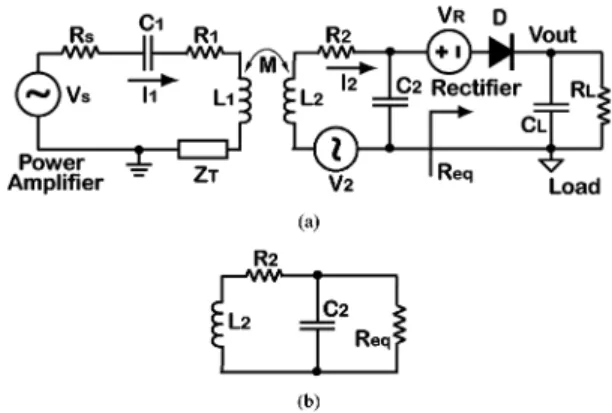
Fig. 2. (a) Basic circuit model for the analysis of the inductive link and its back telemetry mechanism. (b) Simplified model of the transponder circuit.
to be large to provide small “on” resistance, consume chip area and in case of the series switch [11] result in additional dropout voltage, degrading the overall system power efficiency.
We have developed an integrated full-wave rectifier in stan-dard CMOS technology with built-in back telemetry, which can both short and open the transponder coil , to produce a large regardless of the actual load variations. In addition, by combining rectification and back telemetry functions in one cir-cuit block (the gray box in Fig. 1); we have achieved significant saving in chip area and eliminated the need for any additional large switches before or after the rectifier. This can also reduce the dropout voltage and improve the overall power efficiency. In the following section, the theoretical basis for load modula-tion scheme has been laid out with emphasis on the parameters that have the most significant effects on the ASK back telemetry mechanism. Section III describes the circuit topology of the new rectifier and its modes of operation. The simulation and experi-mental measurement results of a prototype rectifier with built-in back telemetry are depicted in Section IV followed by a short discussion and concluding remarks in Section V.
II. LOADMODULATION FORBACKTELEMETRY
Fig. 2(a) shows a circuit model of Fig. 1 block diagram that helps analyzing the load modulation mechanism. The only in-dependent power source in this circuit is a sinusoidal voltage source operating at , which represents the class-E power amplifier with an output impedance of . Current induces a voltage across that is shown as a separate current controlled voltage source, which drives the transponder circuitry by creating .
To model the rectifier, which is a nonlinear circuit, we have assumed that the load time constant is much larger than . This is usually the case in order to reject supply ripples across the load. We replaced the rectifier with an ideal diode in series with a dc voltage source equal to the rectifier dropout voltage . Therefore, the voltage across would be a dc
voltage equal to , where . We can then
find an ac equivalent resistor for the rectifier and by considering the amount of power consumed by [5].
(2) By replacing the load and rectifier with , the transponder simplifies to a series/parallelRLCcircuit, shown in Fig. 2(b), with a loop impedance of and loaded quality factor of
(3) (4) where is the parasitic resistance of the transponder coil [1]. The transponder reflected impedance onto the reader is shown in Fig. 2 as in series with and its numerical value can be found from [10]
(5)
where is the parasitic resistance of and is the coils coupling coefficient, which is defined as
(6) In order to increase the interrogation zone, variations as a result of changes should be maximized. Equations (2)–(6) can provide significant insight in understanding which param-eters in Fig. 2(a) affect and consequently the interrogation zone. Some conclusions are following:
i) is the most significant factor that affects and de-pends on the coils distance, orientation, inductance, ge-ometry, and magnetic properties of the medium [18]. The reading range depends on the minimum for which the transponder can produce detectable variations. ii) and need to be maximized by increasing and
and decreasing and . However, these parameters are interrelated and there is usually a physical size con-straint especially on . In addition, and should resonate at with and , respectively. Therefore, a compromise should be made to optimize these param-eters with proper choice of the coils geometries, number of turns, and wire thicknesses, which have been covered in the literature extensively [5], [11], [16]. It should also be noted that the efficiency of the inductive link, %, is proportional to , which is present in the numer-ator of (5) [5].
iii) It would also be helpful to maximize because it would increase , as shown in [1], and results in higher efficiency, as well as improved back telemetry signal. By choosing according to (7), which is derived by dif-ferentiating (4) with respect to at the resonance fre-quency, the best value for can be found for every given pair of and .
(7)
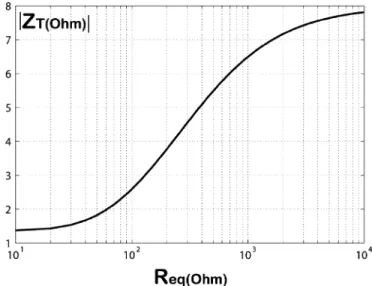
Fig. 3. Reflected transponder impedance onto the reader side (Z ) versus equivalent resistance seen across the rectifier input(R ). Other inductive link parameters are listed in Table I.
TABLE I
SPECIFICATION OF THEINDUCTIVELINK
iv) Reducing the PA output resistance similar to reducing improves detectability of variations.
v) Another important factor in extending the interrogation zone is , which along with are the only parame-ters in (5) that can be varied with the telemetry data to af-fect . Fig. 3 shows how the magnitude of changes with respect to when other inductive link parameters in (5) are selected from our experimental setup listed in Table I. Since is a monotonic function of in its practical range, the best way to maximize is maxi-mizing , which is proportional to according to (2). Therefore, increasing the transponder load variations improves the reading range in passive back telemetry. It is instructive to examine the two extreme limits of as a result of load modulation when the load is short or open cir-cuit. If we short in Fig. 2(b), the transponder circuit reduces to an circuit and the reflected impedance can be found from
Fig. 4. (a) Schematic diagram of the full-wave CMOS rectifier with built-in back telemetry. (b) Schematic diagram of a 2:1 multiplexer (MUX) with dc level shifter.
On the other hand, if is opened, the transponder circuit in Fig. 2(b) simplifies to an circuit in which and cancel out at resonance frequency and can be found from
(9) The numerical values of and for parameters listed in Table I are 1.39 and 7.99 , respectively.
III. BACKTELEMETRYRECTIFIERCIRCUITDETAILS
Fig. 4 shows the schematic diagram of the new rectifier with built-in back telemetry mechanism, which is an enhanced ver-sion of the CMOS rectifier that we reported in [19]. The recti-fier consists of four main transistors: , and , and a few smaller switches that control the operation of these large current carrying transistors based on coil and output voltages. The rectifier input terminals and directly connect to the transponder tank and the rectified dc output is delivered to the load through terminal. and are also connected to a pair of high voltage protection circuits that consist of sev-eral nMOS transistors in series which start shunting current to ground when or exceed a certain limit ( V). The rectifier has three modes of operation that are controlled by its
Fig. 5. Chip micrograph including two rectifiers with built-in back telemetry and a few on-chip ripple rejection capacitors implemented in AMI-0.5m stan-dard n-well CMOS process (Die size: 1.5 mm21.5 mm).
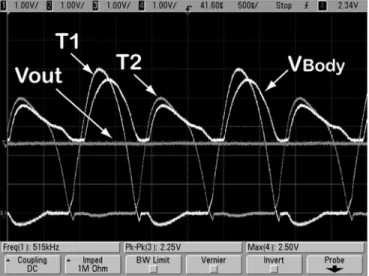
Fig. 6. Measured rectifier operation in Mode-0 showing the waveforms at the input terminals (V andV ), output terminal (Vout), and the separated n-well body voltages(V ), which closely follows Max(V ; V ; V ).
Open Coil (OC) and Short Coil (SC) digital inputs. These oper-ating modes are also summarized in Table II.
Mode-0 Rectifier: In this mode, which is the default rectifier configuration, a pair of 2:1 multiplexers (MUXp) controlled by OC connect the gates of and to turning them into large (4 mm/0.6 m) diode-con-nected pMOS devices, which direct induced current from
Fig. 7. (a) Measured back telemetry waveforms in Mode-1 using Open Coil (OC) input whenR = 330 . (b) Measured back telemetry waveforms in Mode-2 using Short Coil (SC) input whenR = 1:1 k. From top: serial back telemetry data, secondary coil voltage, rectified output, and primary current through a current sense transformer.
to the load. Meanwhile, another pair of 2:1 multiplexers (MUXn) controlled by SC connects the gates of and (1.96 mm/0.6 m) to and , respectively, to return the load current back to the coil from the grounded p-type substrate. and which are parasitic diodes between p-sub and and
drain terminals also help in returning current back to the coil when or V. To eliminate latchup and substrate leakage, and are created on separated n-well regions (Body and Body ) and a pair of transistors to ) is added to each rectifying pMOS complex to dynamically control their isolated n-well potentials ( and ). As a result
) and )
[19]. This mechanism also minimizes the rectifier dropout voltage across and by eliminating their body effect, further improving the overall efficiency. Each MUX in Fig. 4(a) is equipped with a cross coupled dc level shifter, shown in Fig. 4(b), which converts the rectifier input logic levels from to so that they are applicable to the pass gates.
Mode-1 Open Coil: In this mode MUXp
pair connects the gates of and to their isolated body ter-minals resulting in and . Therefore, and turn off and effectively detach the load from . and , which stay in the same state as in Mode-0, remain off because
at the same time. As a result, faces very large impedance through rectifier input, and and theoretically reach their maximum levels, and , respectively. This would result in increased voltage across tank and decreased cur-rent in the primary coil , which can be easily detected es-pecially with small to recover back telemetry data from OC [see Fig. 7(a)]. In practice, various leakage currents at the recti-fier input do not let to be infinitely large as in (9).
Mode-2 Short Coil: In this mode MUXn
pair connects the gates of and to resulting in , where is the nMOS threshold voltage. Therefore, and stay on continuously and create a small impedance across tank, resulting in and theoretically reach their minimum values, and , respectively. This would result in decreased voltage across tank and increased current in the primary coil, which can be easily detected especially with large to recover back telemetry data from SC [see Fig. 7(b)]. Practically, and on resistances do not let reach the short circuit level stated in (8). Diode-connected and stay off as long as and , eliminating the storage capacitor which supplies the load in Modes 1 and 2, from being discharged into and .
IV. MEASUREMENTRESULTS
A prototype rectifier with built-in back telemetry was de-signed and fabricated in the AMI m n-well 3M/2P 5 V standard CMOS process. Fig. 5 shows the prototype chip mi-crograph which includes two rectifiers, enclosed in white boxes, and a few on-chip ripple rejection capacitors. Each rectifier oc-cupies mm of chip area in this process. The measure-ment setup was similar to the block diagram in Fig. 1 [12]. The rectifier was powered by a class-E amplifier operating at 500 kHz through a pair of planar spiral coils, which specifica-tions are summarized in Table I [20].
Fig. 6 shows the rectifier input, body, and output voltage waveforms while operating in Mode-0 with . Even though and separated n-well regions were not physically connected, their body voltages tend to be very
close . It can be seen that follows
as a result of operation and therefore eliminates latchup and substrate leakage by keeping all the parasitic components off [19]. Figs. 7(a) and (b) show the rectifier operation in Modes 1 and 2 when there is a dynamic load condition with and , respectively. In this experiment, back telemetry data was applied to the OC and SC inputs as a 15-kHz square wave with 35% duty cycle (first trace). The second trace in Fig. 7(a) shows how increases as a result of , which reflects back onto the primary coil by a reduction in current . is measured by passing wire through a current sense transformer, which output voltage is shown as on the fourth trace.
Since the focus of this paper is on the integrated back telemetry rectifier as part of the transponder, and not the reader, the current sense transformer was far from optimal and intended only for showing the primary current variations
improved by enhancing its coupling with . In addition, the current sense transformer output can be amplified and filtered around the back telemetry subcarrier spectrum to eliminate the much larger main carrier interference [1]. This would result in a sensitive reader that can detect current variations from an extended reading range in presence of noise and interference.
In contrast with Fig. 7(a), in Fig. 7(b) (Mode-2), de-creases as a result of and reflects back onto the primary coil by an increase in current. In these experiments, we have intentionally chosen a small ripple rejection capacitor, nF, to demonstrate on the 3rd trace in both figures how exponentially decays when or , during which period there is no rectification and the load is tem-porarily supplied by the stored charge in .
V. CONCLUSION
We have developed an integrated full-wave standard CMOS rectifier with dual-mode built-in back telemetry for RFID and implantable microelectronic device applications. The new rec-tifier eliminates the need for additional large switches for load modulation, reducing the rectifier dropout voltage and saving chip area. The new rectifier also provides more flexibility in choosing the most appropriate LSK-ASK back telemetry mech-anism through shorting and/or opening the transponder coil for any certain application. In complex systems with multiple op-erating modes and variable dynamic loading requirements, in order to maximize load variations for back telemetry, OC can be used when power demand is high ( is small) and SC can be used when the system is not fully active and has a small power consumption ( is large). The ultimate goal in both condi-tions is to improve the read range and achieve a more robust back telemetry link by increasing . Alternatively, OC can always be followed by SC to produce maximum variations regardless of . Further, since Modes 1 and 2 can be distin-guished on the reader side by a reduction and an increase in the primary coil current, respectively, it is also possible to assign more bits to OC and SC combinations to achieve higher back telemetry data rates.
In order to verify and evaluate the new rectifier topology, we developed a prototype version of the new rectifier in the AMI m n-well standard CMOS process, occupying mm of chip area. The prototype rectifier was tested and proved to be fully functional in all three modes of operation: rectifier, open coil, and short coil.
ACKNOWLEDGMENT
The authors would like to thank the Department of Electrical and Computer Engineering, North Carolina State University, for their support and the MOSIS Educational Program for fabri-cating the prototype chip.
REFERENCES
[1] K. Finkenzeller, RFID-Handbook, 2nd ed. Hoboken, NJ: Wiley, 2003.
[2] U. Kaiser and W. Steinhaugen, “A low-power transponder IC for high-performance identification systems,”IEEE J. Solid-State Circuits, vol. 30, no. 3, pp. 306–310, Mar. 1995.
[3] A. Abrial, J. Bouvier, M. Renaudin, P. Senn, and P. Vivet, “A new contactless smart card IC using an on-chip antenna and an asyn-chronous microcontroller,”IEEE J. Solid-State Circuits, vol. 36, no. 7, pp. 1101–1107, Jul. 2001.
[4] U. Karthaus and M. Fischer, “Fully integrated passive UHF RFID transponder IC with16:7 0 W minimum RF input power,”IEEE J. Solid-State Circuits, vol. 38, no. 10, pp. 1602–1608, Oct. 2003. [5] W. H. Ko, S. P. Liang, and C. D. Fung, “Design of radio-frequency
powered coils for implant instruments,”Med. Biol. Eng. Comput., vol. 15, pp. 634–640, Nov. 1977.
[6] M. W. Baker and R. Sarpeshkar, “Feedback analysis and design of RF power links for low-power bionic systems,”IEEE Trans. Biomed. Cir-cuits Syst., vol. 1, no. 1, pp. 28–38, Mar. 2007.
[7] D. C. Galbraith, M. Soma, and R. L. White, “A wide-band efficient inductive transdermal power and data link with coupling insensitive gain,”IEEE Trans. Biomed. Eng., vol. 34, no. 4, pp. 265–275, Apr. 1987.
[8] W. J. Heetderks, “RF powering of millimeter and submillimeter-sized neural prosthetic implants,”IEEE Trans. Biomed. Eng., vol. 35, no. 5, pp. 323–327, May 1988.
[9] C. M. Zierhofer and E. S. Hochmair, “High-efficiency coupling-in-sensitive transcutaneous power and data transmission via an inductive link,”IEEE Trans. Biomed. Eng., vol. 37, no. 7, pp. 716–722, Jul. 1990. [10] Z. Tanget al., “Data transmission from an implantable biotelemeter by load-shift keying using circuit configuration modulator,”IEEE Trans. Biomed. Eng., vol. 42, pp. 524–528, May 1995.
[11] G. Wang, W. Liu, M. Sivaprakasam, and G. A. Kendir, “Design and analysis of an adaptive transcutaneous power telemetry for biomedical implants,”IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 52, no. 10, pp. 2109–2117, Oct. 2005.
[12] Microchip Technology Inc., “Tire pressure monitoring system user’s guide,” [Online]. Available: http://ww1.microchip.com/down-loads/en/DeviceDoc/51624a.pdf Microchip Technology Inc., “Tire pressure monitoring system user’s guide,” [Online]. Available: http://ww1.microchip.com/downloads/en/DeviceDoc/51624a.pdf [13] American National Standard for limits and methods of measurement of
radio disturbance characteristics of Industrial, Scientific, and Medical (ISM) radio-frequency equipment, ANSI C63.011-2000, ANSI, 2000. [14] N. O. Sokal and A. D. Sokal, “Class E, a new class of high efficiency
tuned single-ended switching power amplifiers,”IEEE J. Solid-State Circuits, vol. SC-10, pp. 168–176, Jun. 1975.
[15] P. R. Troyk and M. A. K. Schwan, “Closed-loop class E transcutaneous power and data link for microimplants,”IEEE Trans. Biomed. Eng., vol. 39, pp. 589–599, Jun. 1992.
[16] M. Ghovanloo and G. Lazzi, “Transcutaneous magnetic coupling of power and data,” inWiley Encyclopedia of Biomedical Engineering, M. Akay, Ed. Hoboken, NJ: Wiley [Online]. Available: http://www.mrw. interscience.wiley.com/ebe/articles/ebs1372/bibliography-fs.html [17] C. M. Zierhofer and E. S. Hochmair, “Geometric approach for
coupling enhancement of magnetically coupled coils,”IEEE Trans. Biomed. Eng., vol. 43, no. 7, pp. 708–714, Jul. 1996.
[18] M. Soma, D. G. Galbraith, and R. L. White, “Radio-frequency coils in implantable devices: misalignment analysis and design procedure,”
IEEE Trans. Biomed. Eng., vol. 34, pp. 276–282, Apr. 1987. [19] M. Ghovanloo and K. Najafi, “Fully integrated wide-band
high-cur-rent rectifiers for wireless biomedical implants,”IEEE J. Solid-State Circuits, vol. 39, no. 11, pp. 1976–1984, Nov. 2004.
[20] M. Ghovanloo and S. Atluri, “A wideband power-efficient inductive wireless link for implantable microelectronic devices using multiple carriers,”IEEE Trans. Circuits Syst. I, Reg. Papers, vol. 54, no. 10, pp. 2211–2221, Oct. 2007.
[21] M. Suster, J. Guo, N. Chaimanonart, W. H. Ko, and D. J. Young, “A wireless strain sensing microsystem with external RF power source and two-channel data telemetry capability,” inIEEE Dig. Tech. Papers Solid-State Circuits Conf., Feb. 2007, pp. 380–381.
[22] M. Ghovanloo and K. Najafi, “A modular 32-site wireless neural stim-ulation microsystem,”IEEE J. Solid-State Circuits, vol. 39, no. 12, pp. 2457–2466, Dec. 2004.
[23] M. Ghovanloo and K. Najafi, “A wireless implantable multichannel microstimulating system-on-a-chip with modular architecture,”IEEE Trans. Neural Syst. Rehab. Eng., vol. 15, no. 3, pp. 449–457, Sep. 2007.
Maysam Ghovanloo (S’00–M’04) was born in 1973 in Tehran, Iran. He received the B.S. degree in electrical engineering from the University of Tehran, in 1994 and the M.S. degree in biomedical engineering from the Amirkabir University of Tech-nology, Tehran, in 1997. He also received the M.S. and Ph.D. degrees in electrical engineering from the University of Michigan, Ann Arbor, in 2003 and 2004, respectively. His Ph.D. research was on de-veloping a wireless microsystem for micromachined neural stimulating microprobes.
In December 1998, he founded Sabz-Negar Rayaneh Co. Ltd., Tehran, to manufacture physiology and pharmacology research laboratory instruments. In summer 2002, he was with Advanced Bionics Inc., Sylmar, CA, working on spinal-cord stimulators. From 2004 to 2007, he was an Assistant Professor with the Department of Electrical and Computer Engineering, North Carolina State University, Raleigh, where he founded and directed the NC-Bionics Lab. In June 2007, he joined the faculty of Georgia Institute of Technology, Atlanta, where he is currently an Assistant Professor in the School of Electrical and Computer Engineering. He has more than 60 conference and journal publications.
Dr. Ghovanloo is an Associate Editor of the IEEE TRANSACTIONS ON CIRCUITS ANDSYSTEMS—II: EXPRESSBRIEFS. He has been a member of the Technical Program Committee for theIEEE Midwest Circuits and Systems
(MWSCAS), International Symposium on Circuits and Systems (ISCAS), andBiomedical Circuits and Systems(BioCAS) conferences. He has received awards in the operational category of the 40th and 41st DAC/ISSCC student design contest in 2003 and 2004, respectively. He is a member of Tau Beta Pi, Sigma Xi, and IEEE Solid-State Circuits, Circuits and Systems, and Engineering in Medicine and Biology societies.
Suresh Atluri(S’05–M’07) was born in India in 1983. He received the B.S. degree in electrical and electronics engineering from BITS, Pilani, Rajasthan, in 2004 and the M.S. degree in electrical engineering from the Department of Electrical and Computer Engineering, North Carolina State University, Raleigh, in 2006.
He specialized in analog, digital, and microwave circuit design. His research was oriented toward de-veloping inductive power and data transfer circuits for implantable biomedical devices. He joined Inte-grated Device Technologies Inc., Atlanta, GA, in 2006, where he works as an electronics design engineer.