2016 6th International Conference on Information Technology for Manufacturing Systems (ITMS 2016) ISBN: 978-1-60595-353-3
1 INTRODUCTION
Along with the quick development of sensor technology and wireless communication technique, wireless sensor networks (WSN) have emerged as the times require. A WSN usually consists of tens or hundreds of wirelessly connected sensors and the different nodes in network share the resources with each other. At present, WSN have been widely used for monitoring and control in military, environmental, health and commercial systems [1]-[5]. However, there is a very important premise for realization of these applications, sensing nodes must be aware of their own position.
Many methods have been proposed to estimate nodes position. There are range-based localization algorithms and range-free localization algorithms for sensor network localization. Examples of the range-free localization algorithms can include centroid algorithm [6], Dv-Hop algorithm [7], APIT
algorithm [8]. The range-free localization algorithm does not need additional hardware, thus, it is a cost-effective approach for the WSN localization problem. However, the range-free localization algorithm can only give rise to a round estimate. The range-based localization algorithms estimate the positions of nodes according to the distance and directional angles information among nodes. The measurement technology of the range-based localization algorithms are mainly with the time-of-arrival (TOA), the time-difference-of-arrival (TDOA), the angle-of-arrival (AOA), the signal strength (SS) based methods or hybrid location methods.
At present, non-line-of-sight (NLOS) is the major factor that affected WSN location precision. For NLOS situation, the propagating signal between blind nodes and anchor nodes goes through reflections and refractions off many objects in its path. This causes the signal to arrive the receiver
LS-SVM Based WSN Location Algorithm in NLOS Environments
Hongyan Zhang, Zheng Liu, Biwen Wang
University of Electronic Science and Technology of China (UESTC), Chengdu, China
Peng Liu
Space Star Technology Co., Ltd. and State Key Laboratory of Space-Ground Integrated Information Technology, BeiJin, China
Jiyan Huang
Institute of Electronic and Information Engineer in Dongguan Uestc, Dongguan, China
Daoxin Li
North Engineering Co., LTD of the Electrification Bureau Group, Crcc, Taiyuan, China
ABSTRACT: Location methods based on learning theory perform well in wireless cellular networks. These methods may be further improved since range measurements among all nodes are not taken into consideration, while these range measurements in the WSN location system are generally available. In this paper, we propose an improved LS-SVM based location algorithm to solve mobile location problem in a NLOS environment. We extend SVM method from wireless cellular networks to WSN location system. Compared with LS-SVM in wireless cellular networks only using the range measurements between anchor nodes and blind nodes, the proposed method can improve the positioning accuracy by using all the range measurements among the nodes. Moreover, steepest descent method is used in the proposed method to iterative search the optimal position estimation of blind nodes. The simulations results in different cases illustrate that the proposed algorithm outperforms the kernel method and LS-SVM method on location accuracy.
from a different angle than the direct path between blind nodes and anchor nodes, and for ranging measurements (or equivalently, time of arrival), it will add a large positive error in addition to standard measurement error [9]-[10]. Although many location methods such as NLOS identification algorithm [11], inequality constraint [12] and scatter information [13] were addressed to suppress NLOS errors, their performance improvement is not significant since all of these methods don’t consider the prior information on sample points. Based on the prior information of sample points, several learning location methods have been proposed to estimate the position of blind nodes [14]-[16] and obtain the higher positioning accuracy. The method in [14] first generates a NLOS correction map based on Kriging method, and then uses the correction map to rectify the distorted blind nodes location. The method presented in [15] introduces the use of nonparametric kernel-based estimators for location of the blind nodes using measurements of propagation delays. Furthermore, a LS-SVM based location method in [16] is proposed to learn the relationship between the TOA measurements and the blind nodes location. All of these methods mentioned in [14]-[16] perform well in wireless cellular networks. These methods may be further improved since range measurements among all nodes are not taken into consideration, while these range measurements in the WSN location system are generally available. Thus, in this paper, we propose an improved LS-SVM based location algorithm to solve mobile location problem in a NLOS environment. We extend LS-SVM method from wireless cellular networks to WSN location system. Compared with LS-SVM in wireless cellular networks only using the range measurements between anchor nodes and blind nodes. The proposed method can improve the positioning accuracy by using all the range measurements among the nodes. Moreover, steepest descent method is used in the proposed method to iterative search the optimal position estimation of blind nodes. The simulation results verifies the proposed method.
The rest of this letter is organized as follows. Section2 presents the proposed algorithm, and Section 3 presents the simulation results. Finally, conclusion is given in section 4.
2 PROPOSED METHOD
In this section, we extend LS-SVM method from wireless cellular networks to WSN location system. Compared with LS-SVM in wireless cellular networks only using the range measurements between anchor nodes and blind nodes, the proposed method can improve the positioning accuracy by using all the range measurements among the nodes.
In general, learning algorithms consist of two phases: training and positioning. During the training phase, parameters of learning algorithms are estimated using measurements of training points. During the positioning phase the measurement of blind nodes is performed, and then the position of blind nodes can be computed using the parameters estimated in the training phase.
For simplification, we consider a TOA based WSN location system. Assuming that devices ( , ),i 1,..., Mx yi i = is the position of the ith anchor node with the known coordinates and devices
(
x y) )j, j)
,j=1,...,N is the position of the j thtraining point and rji is the corresponding range
measurement to the ith anchor node. Given a
training data set of N points:
{( j, ) |vj j 1, , N}
= =
D R L (1)
With input data = 1 N
j rj rjM∈R
R L and
output data vj∈R. In LS-SVM method, optimal
problems can be described as [16]-[17]:
2 1
1 1
min ( , )
2 2
N T
j j
J γ e
=
= +
∑
w e w w (2)
Subject to:
( )
T
j j j
v =w ϕ R +b+e (3)
Where () :ϕ RN →RNh is a nonlinear mapping
in kernel space, weight vector w∈RNh , error
variable e=
[
e1 L eN]
, and b is a bias. J is aloss function and γ is an adjustable constant. According to optimal function (2) and (3), we define the Lagrange function as:
2 1 1 1 1 ( , , , ) 2 2 { ( ) } N T j j N T
j j j j
j
L b e
a b e v
γ ϕ = = = + − + + −
∑
∑
w e a w w
w R
(4)
Where aj are Lagrange multipliers, as support
vectors (aj∈R). The conditions for optimality are given by:
1
1
0 ( )
0 0
0
0 ( ) 0
N j j j N j j j j j T
j j j
j L a L a b L a e e L
b e v
a ϕ γ ϕ = = ∂ = → = ∂ ∂ = → = ∂ ∂ = → = ∂ ∂ = → + + − = ∂
∑
∑
w R w w R (5)0 0 1 T M M b I = + 1
1 Ω a v
γ
(6)
Where
[
1 1]
TN = N
1 L , Ωkl =ϕ(Rk)Tϕ( )Rl ,
, 1,..., N
k l = ,
[
1]
TN
a a
=
a L , [ 1 ]
T N
v v
=
v L .
According to Mercer’s condition, there is mapping ( )ϕ • and kernel function:
( , ) ( )T ( )
k l k l
K R R =ϕ R ϕ R (7)
Assuming that ( , )x y) )j j is the position estimation
of the jth blind node, ( , )x yj j is the true position
of jth blind node, rji is the range measurement to
the ith anchor node. Rj =[rj1 L rjM] is the
corresponding vector of range measurements. During the position phase, the location of blind nodes can be obtained:
1
( j) N i ( j, i)
i
v a K b
=
=
∑
+R R R (8)
Where the parameters ai and b can be
obtained by solving (6). Kernel function has different types, such as poly-nominal, MLP, splines, RBF and so on. We will focus on RBF kernel which corresponds to [5] [16]:
2
2
( , ) exp( )
2 k l k l K σ −
= − R R
R R (9)
The position estimation of blind nodes by (8) may be further improved since range measurements among all nodes are not taken into consideration, while these range measurements in the WSN location system are generally available. Thus, in order to improve the localization accuracy of blind nodes in the WSN location system, we can use the range measurements between anchor nodes and blind nodes and steepest descent method to iterative search the optimal position estimation of blind nodes.
Calculate the distance among the position estimation of blind nodes.
2 2
(x x ) (y y )
ij i j i j
r) = ) −) + ) −) (10) Where
(
x , y) )j j)
is the position estimation of thejth blind node.
The following criterion is used to determine the line-of-sight (LOS) path:
*
ij ij rij
r) −r ≤ξ σ (11)
Where = (x x )2 (y y ) +2
ij i j i j ij
r − + − n is the
corresponding range measurement between the ith
blind node and the jth blind node, nij is the
standard range measurement noise and is subject to Gaussian distribution with zero-mean and variance
2
rij
σ , ξ is the discriminant coefficient. When (11)
holds, the r)ij will be added to LOS range
measurement set L.
The size of LOS range measurement set L is
affected byξ, because the value of ξ determine
ij
r)
whether or not add to LOS range measurement set
L. Normally distributed data assumes that about
99% of the values in the sample are within 2.58 standard deviation of the mean. We assume that the more blind nodes in the LOS path, so in our simulation, we choose:
=2.58
ξ (12)
According to formula (10) and (11), we can define the cost function of distance vector:
2 1 1 ( ) K K ij ij i j j i
J r r
= =
>
=
∑∑
) − (13)Where r)ij∈L, and K is the number of elements
for LOS range measurement set L.
Substituting (13) into
i
J x
∂
∂) and
i
J y
∂
∂) , gives:
1 1 2( ) 2( ) K i j ij ij j i ij i j K i j ij ij j i ij i j x x J r r x r y y J r r y r = ≠ = ≠ − ∂ = − ∂ − ∂ = − ∂
∑
∑
) ) ) ) ) ) ) ) ) ) (14)From (14), the steepest descent method is used to iteratively search the optimal position estimation of the ith blind node:
1 1
1 1
m m m m
m m
i i i i
i i
J J
x y x y u
x y − − − − ∂ ∂ = − ∂ ∂ ) ) ) )
) ) (15)
Where u is the step size, m is the number of
iterations.
To sum up, here are the steps:
(1)Given training data
{( j, ) |vj j 1, , N}
= =
D R L , calculate
[
a1 aN]
T=
a L and b from (6).
(2)Calucate the position estimation of blind nodes from (8).
(4)Determine the LOS path from (11).
3 SIMULATION RESULTS
[image:4.612.318.552.38.186.2]Assuming in a Manhattan-like urban environment, the geometry of anchor nodes with the known coordinates configuration is shown in Fig. 1. The square regions of dimensions represent buildings, and the other regions represent streets. This configuration is used since similar configurations have been used to evaluate other blind nodes location schemes [10] [14]-[15]. The coordinates of Anchor nodes are m, m, m. The training points are uniformly distributed in the street, and the positions of ten blind nodes are randomly deployed. The standard range measurement error of TOA, brought by the measurement equipment, could be modeled as a Gaussian random variable with zero-mean.
Figure 1. Manhattan-like urban environment.
In this section simulation, to compare with the proposed methods, kernel method [15] and LS-SVM method [16] are selected here due to them wide application in the WSN location system.
The position error of blind nodes is obtained from the average of 500 independent runs, and shown as:
2 2
i
[ ( i) ( i i) ]
MLE=E x) −x + y) −y (16)
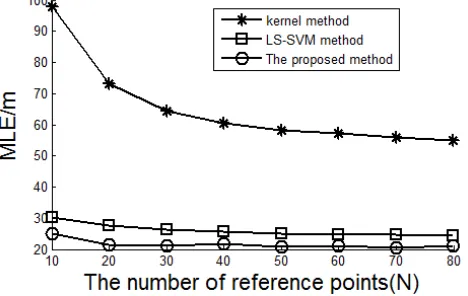
3.1 Performance comparison with different number of training points
In this simulation, Fig.2 is performed to study the effects of the number of training points on the WSN location system. The number of training points is varied from 10 to 80, and the standard range measurement error is 30m. It can be seen from figure that the mean location error decreases with the number of training points and the proposed method provides much better performance than the kernel method and LS-SVM method.
Figure 2. Performance comparison with different number of training points.
3.2 Performance comparison with different standard range measurement error
In this simulation, for a practical system it is interesting to study the impacts of the standard deviations of range measurements. Fig3, shows the MLE versus standard deviations of range measurements when the number of training points is 50. The standard deviations of range measurements are varied from 10m to 30m. It can be observed from figure that the mean location error increases with the standard deviations of range measurements and the proposed method outperforms the kernel method and LS-SVM method. As the range noise becomes small, the positioning accuracy of the proposed method increases.
Figure 3. Performance comparison with different standard range measurement error.
4 CONCLUSIONS
[image:4.612.66.282.284.478.2] [image:4.612.319.551.429.573.2]based location algorithm in this paper to solve mobile location problem in a NLOS environment. A comparison is performed between the proposed method and two other learning methods (kernel method and LS-SVM method). The simulations results in different cases illustrate that the proposed algorithm outperforms the kernel method and LS-SVM method. As a result, the proposed algorithm can enhance the positioning accuracy and obtain reliable positioning information.
ACKNOWLEDGEMENTS
This work was supported by the Open Research Fund of State Key Laboratory of Space-Ground Integrated Information Technology under grant No.2014_CXJJ-DH_09, the National Natural Science Foundation of China (61201275), the Fundamental Research Funds for the Central Universities (ZYGX2013J026), the Guangdong Provincial Natural Science Foundation of china (2015A030313821).
REFERENCES
[1]Akyildiz, I. F., Su, W., Sankarasubramaniam, Y., & Cayirci, E. (2002). A survey on sensor networks. Communications magazine, IEEE, 40(8):102-114.
[2]Patwari, N., Ash, J. N., Kyperountas, S., Hero III, A. O., Moses, R. L., & Correal, N. S. (2005). Locating the nodes: cooperative localization in wireless sensor networks. Signal Processing Magazine, IEEE, 22(4):54-69.
[3]Chiu, W. Y., Chen, B. S., & Yang, C. Y. (2012). Robust relative location estimation in wireless sensor networks with inexact position problems. Mobile Computing, IEEE Transactions on, 11(6):935-946.
[4]Ji, X., & Zha, H. (2004, March). Sensor positioning in wireless ad-hoc sensor networks using multidimensional scaling. In INFOCOM 2004. Twenty-third AnnualJoint Conference of the IEEE Computer and Communications Societies (Vol. 4, pp. 2652-2661). IEEE.
[5]Huang, J., Wang, P., & Wan, Q. (2011). CRLBs for WSNs localization in NLOS environment. EURASIP Journal on Wireless Communications and Networking, 2011(1), 1-14.
[6]Su, X., & Lei, Z. (2011, October). Improved centroid algorithm localization for WSN based on Particle Swarm Optimization. In Computational Intelligence and Design (ISCID), 2011 Fourth International Symposium on (Vol. 1,
pp. 139-142). IEEE.
[7]Li, Y. (2011). Improved DV-HOP Location Algorithm based on Local Estimating and Dynamic Correction in Location for Wireless Sensor Networks. International Journal of Digital Content Technology and its Applications, 5(8).
[8]Meng, F., Li, X., & Zhou, Y. (2012). The Improved Location Algorithm of Apit Based on Midline Segmentation for Wireless Sensor Network. In Advances in Computer Science and Engineering (pp. 241-248). Springer Berlin
Heidelberg.
[9]Caffery Jr, L. J., & Stüber, G. L. (1998). Overview of radiolocation in CDMA cellular systems. Communications Magazine, IEEE, 36(4):38-45.
[10] Huang, J. Y., Wang, P., Wan, Q., Chiang, L. P., & Choo, F. H. (2009, December). Robust least squares support vector machine algorithm for mobile location. In Wireless Mobile and Computing (CCWMC 2009), IET International Communication Conference on(pp. 5-8). IET.
[11] Ma, L. C., Hwang, J. H., Choi, N. H., & Kim, J. M. (2008). Adaptive Modulation Method using Non-Line-of-Sight Identification Algorithm in LDR-UWB Systems. The Journal of Korean Institute of Communications and Information Sciences, 33(12A):1177-1184.
[12] Venkatraman, S., Caffery Jr, J., & You, H. R. (2004). A novel TOA location algorithm using LOS range estimation for NLOS environments. Vehicular Technology, IEEE Transactions on, 53(5):1515-1524.
[13] Yang, T., Yu, C., Wang, T., & Jin, L. (2011). A single observer location method under the scatter signals position disturbance situation: the constraint total least square method. Science China Information Sciences, 54
(1):146-152.
[14] Li, B., Rizos, C., & Lee, H. K. (2005). Utilizing kriging to generate a NLOS error correction map for network based mobile positioning. Positioning, 1(09).
[15] McGuire, M., Plataniotis, K. N., & Venetsanopoulos, A. N. (2003). Location of mobile terminals using time measurements and survey points. Vehicular Technology, IEEE Transactions on, 52(4):999-1011.
[16] Sun, G., & Guo, W. (2005). Robust mobile geo-location algorithm based on LS-SVM. Vehicular Technology, IEEE Transactions on, 54(3):1037-1041.
[17] Van Gestel, T., De Brabanter, J., De Moor, B., Vandewalle, J., Suykens, J. A. K., & Van Gestel, T. (2002).
Least squares support vector machines (Vol. 4). Singapore: