2017 International Conference on Computer, Electronics and Communication Engineering (CECE 2017) ISBN: 978-1-60595-476-9
Pseudo Multi-hop Distributed Consensus Algorithm with Link Failure
Huan-xin PENG
*, Wen-kai WANG and Bin LIU
Department of Mechanical Engineering, Nanjing Institute of Industry Technology, 1, Yang Shan North Road, Nanjing, China
*Corresponding author
Keywords: Distributed consensus, Link failure, Pseudo multi-hop.
Abstract. For network congestion in the communication among agents, there are often random communication link failures among agents. The convergence performance of the distributed consensus algorithm with link failure become bad, even become diverged, and the rate of convergence of the algorithm become smaller. In this paper, we analyze the pseudo multi-hop distributed consensus algorithm with link failures, and research the relation between convergence performance and the probability of link failures. Simulation results are provided to verify these analytical results.
Introduction
In the past few years, due to broad application in many fields, distributed average consensus problems have attracted much attention[1,2]. Convergence rates of the distributed average consensus algorithms are very important, especially for large scale complex topology. In order to accelerate the convergence rate of distributed consensus, in [3], the pseudo multi-hop distributed consensus algorithm is proposed. The pseudo multi-hop distributed consensus algorithm accelerates dramatically the convergence rate by utilizing the previous information of non-adjacency nodes based on single-hop communication. The convergence rate of the pseudo multi-hop algorithm is much bigger than those of the other algorithms.
For communication noise, time-delay, network congestion and so on, there are often link failure in the communication among agents. While there are link failure among agents, the convergence performance of distributed consensus often becomes bad. While there are link failures among agents, the communication topology can be considered as a random topology. In [4], the distributed consensus based on the Erodos-Renyi random topology [5] is researched, and it is proved that the distributed consensus can reach a consensus while the probability of links of the random topology is independently identically distributed. In [6], it is proved that the distributed consensus algorithm can reach a consensus while the probability of links of the random topology meets certain conditions. In [7], the convergence conditions of distributed consensus with link failures are given based on ergodicity and probability of the link failures.
In the paper, based on random topology, we analyze the convergence performance of the pseudo multi-hop algorithm with link failure, and the relation between the probability of link failure and the convergence performance of distributed consensus algorithms.
Pseudo Multi-hop Distributed Consensus with Link Failure
We introduce some notations and concepts that will be used through this paper. A graph
) ,
(V E
G represents the communication topology in a networked multi-agent system withNagents,
where Vis a set of vertices, and Eis a set of edges. Each edge in the graph is denoted by(i,j). An
undirected graph is denoted by(i,j)E (j,i)E. A directed graph is denoted by(i,j)(j,i). A set
of verticesNiis denoted as the set of vertices that can send directly information to vertexi.
) ( deg ) (
degout i in i , then graph G(V,E) is balanced, an undirected graph G(V,E)is balanced. A
path is a set of vertices, in which the edge formed by adjacent vertices is an element of the setE. A
path is an m-hop path if it has m edges. A graph is connected if any two vertices in the graph can be
joined by a path. A graph G2(V,E2) is defined as two-hop topology graph of G(V,E), and all
elements of the edge set E2 are two-hop paths of the graphG(V,E), as well, a graph Gm(V,Em) is
defined as m-hop topology graph of G(V,E), and all elements of the edge set Em are m-hop paths
of the graphG(V,E), An adjacency matrix ofGmis denoted as N N m il m a
A { } . A m-hop Laplacian
matrix of graph G(V,E) is denoted as Lm{lilm}mAm , where { .} 1 1 1
N j m Nj N j m jm diag a a . A
directed graph G(V,E) is strong connected while there is a directed path between any two nodes,
and a directed graph is balanced while the in-degree of every node is equal to itself out-degree, i.e.
V i i i out in()deg (),
deg .
Supposing that the probability of link failure is independent identically distributed, while there are link failures in the communication among agents, the topology in time k can be considered
asG(k)(V,E(k)), for the super-graph G(V,E), we can get E(k)E. In timek, for the graph
)) ( , ( )
(k V E k
G , the corresponding single-hop adjacency matrix and single-hop Laplacian matrix is
respectively A1(k), L1(k). In the paper, we define the m-hop adjacency matrix and m-hop Laplacian
matrix of graph G(k)(V,E(k)) is respectivelyAm(k), Lm(k). We define the probabilistic matrix
about link failure as P{pij) , then, A1(k){aij(k)} ,
N j Nj N j
j k a k a diag k 1 1 1
1( ) { ( ) ( )} ,
) ( ) ( )
( 1 1
1k k A k
L , as well, Lm(k)m(k)Am(k). where, we define L1(k)E(L1(k)), Lm(k)E(Lm(k)).
The pseudo multi-hop distributed consensus algorithm [3] with link failure can be written as:
i N j j j i ij ii k x k a k x k x k y k x( 1) ( ) ( ){( ( ) ( )) { ( )
) 1 ( { )) 1 ) 1 ){ (
k y k x k x ka j l
N l i jl j ( ( (
l N p l ilp k x k x k
a ( ){( ( 2) ( 2)
) 1 ( )( ( ) 2 ( {
m k x k a m k y i N t st s s }}}}} )} 1 ( xs k m (1)
)) ( ) ( ( ) ( ) 1
(k a k x k x k
y i j
N j ij i i
(2)where xi(k) is the state of node iin step k, yi(k)is the state derivative of node iin step k, is a constant step size.
Dynamic Analyses for Pseudo Two-hop Consensus Algorithm with Link Failure
From (1) and (2), we can get an equivalent equation
) 1 ( ) ( ) ( ) ( ) ( ) 1
(k x k L1 k x k L2 k x k
x Lm(k)x(km1 (3)
) ( ) ( ) 1
(k H k X k
N N N N N N N N N N N N N m N I I I k L k L k L k L I k H 0 0 0 0 0 0 0 0 0 0 ( ) ) ( ) ( ) ( ) ( 3 2
1
, and N N N N N N K K K J 0 0 0 0 0 0
, where T
N
K 1 11 , 1[1,,1]T and0[0,...,0]T.
Theorem1. if the super-graph G(V,E)is undirected connected, while (H J)1 (where
)) (
(H k
E
H , (.)denotes the spectral radius of a matrix.), then the mean of nodes in the pseudo
multi-hop distributed consensus algorithm with link failure in (3) can reach a average consensus, i.e.
) 0 ( 1 )) ( ( lim x N k x E T
k 11 .
Proof. For an undirected connected graphG, when(H J)1, then matrix H has only Eigen
value that is equivalent to 1 . Let us definewr, wl are respectively a right eigenvector and a left
eigenvector of H corresponding to(H)1, then we can get lT T l H w
w , Hwrwr , and 1 T l rw
w ,
where T T T r
N
w 1[1 ,,1 ] , T T T l
w [1 ,0 ,] , and0[0...0]T are aN dimensional vector. We can obtain
from (6): ) 0 ( ) 0 ( lim ) ( lim )) 1 ( (
limE X k HX k H 1X wrwTl x
k k k k T T T T l
rw x x m w [ (0) , ( 1) ]
. i.e.lim ( ( 1)) 1 x(0)
N k
x
E T
k 11 .
Theorem2. If the super-graph G(V,E)is directed strong connected graph, G(V,E)and
multi-hop topology graph Gm(V,Em)are balanced, while(H J)1, then the mean of nodes in pseudo
multi-hop distributed consensus algorithm can reach an average consensus.
Proof. The proof of this theorem is similar as the proof of the theorom1, where we omitted the proof the this theorem from this paper.
Theorem3. If the super-graph G (V,E)is undirected connected, or directed strong connected
graph, andG(V,E)and multi-hop topology graph Gm(V,Em)are balanced, while(H J)1, then
the pseudo mulit-hop distributed consensus algorithm can reach an average consensus in mean square sense, i.e. 2
2
1
lim || ( ) T (0) || 0
k
E x k x
N
11
Proof. The proof of this theorem is similar as the proof of the theorom1, where we omitted the proof the this theorem from this paper.
Simulations and Analyses
In order to verify the results of the pseudo multi-hop distributed consensus algorithm with link failure, we test it on two different networks listed in figure 1, figure 2 denoted asG1andG2.
TopologyG1 is an undirected connected graph with 25 nodes, andG2 is a directed strongly connected
network with 25 nodes. For the sake of simplicity, we assume the weightsaij1for any links, and the
Figure 1. Undirected regular topology graph. Figure 2. Directed balanced topology graph.
[image:4.612.211.397.423.583.2]
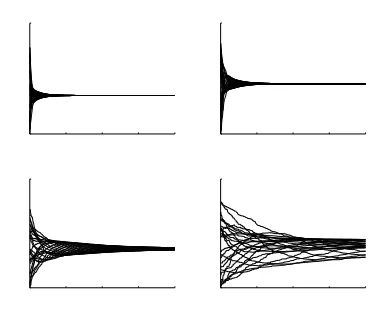
Figure 3. The pseudo five-hop distributed consensus algorithm with different probability of link failure based on graph G1.
Figure 4. The pseudo five-hop distributed consensus algorithm with different
probability of link failure based on graph G2.
Figure 3, figure 4 respectively show the convergence performance of pseudo five-hop algorithm with link failure based on graphG1 and graphG2. Obviously, while the communication topology
Conclusions
In this paper, when there is link failure among agents, the performance of distributed consensus algorithm degrades. While the communication topology is undirected connected or directed strongly connected, and the super graph and multi-hop topology graph of the communication topology are balanced, we have proved that the mean of nodes’ states in pseudo multi-hop distributed consensus algorithm with link failure can reach an average consensus. While the communication topology is directed strongly connected, but the communication topology isn’t balanced or the multi-hop topology of the communication topology isn’t balanced, the mean of nodes in the pseudo multi-hop distributed consensus algorithm can reach a consensus, but the consensus isn’t equal to the average of initial states of nodes. In the meanwhile, we have proved that the pseudo multi-hop distributed consensus algorithm with link failure can reach an average consensus in mean square sense. The simulation results show that the convergence rate of the pseudo multi-hop distributed consensus algorithm depends on the probability of link failures. Based on the undirected communication topology, the convergence performance of the pseudo multi-hop distributed consensus algorithm with link failure is better than the convergence performance of the pseudo multi-hop distributed consensus algorithm with link failure based on directed communication topology.
Acknowledgment
Supported by Nanjing Institute of Industry Technology foundation (YK16-01-02). Supported by Qing Lan Project rsc16-01-01.
Supports by the open foundation on Precision manufacturing engineering and technology research of Jiangsu development center (ZK16-01-06).
Supported by Nanjing Institute of Industry Technology foundation (YK16-01-03).
References
[1] Z. Fu, X. He, T. Huang, et al, “A distributed continuous time consensus algorithm for maximize social welfare in micro grid,” Journal of the Franklin Institute, vol. 353, no. 15, pp. 3966-3984, 2016.
[2] G. Zhai, “A generalization of the graph Laplacian with application to a distributed consensus algorithm,” International Journal of Applied Mathematics & Computer Science, vol. 25, no. 2, pp. 353-360, 2015.
[3] H.X. Peng, G.Q. Qi and A.D. Sheng, “Pseudo multi-hop relay distributed consensu algorithm,” Journal of Control Theory and Application, vol.29, no. 5, pp. 12-15, 2012.
[4] Y. Hatona, M. Meshahi, “Agreement over random networks,” IEEE Trans. Automat. Contr, vol. 50, no.11, pp. 1867-1872, 2005.
[5] A. Erodos, A. Rényi. On the evolution of random graphs, vol. 5, Publ. Math. Inst. Hung. Acad. Sci, pp. 17-61, 1960.
[6] C.W. Wu, “Synchronization and convergence of linear dynamics in random directed networks,” Trans. Automat. Contr, vol. 51, no. 7, pp. 1207-1211, 2006.