20 | P a g e
MULTIPLE MOTION CONTROL SYSTEM OF
ROBOTIC CAR BASED ON IOT TO
CONTROL WEBPAGE
MADHURA1, T.SRIVANI 2,B.J.SUNIL3
1 Pursuing M.Tech (DSCE), 2 Assistant Professor, 3Associate Professor & Head of The Dept. of Electronics and
Communication Engineering from Sree Visvesvaraya Institute Of Technology & Science, Chowdarpalle (V), Devarkadra(Mdl) , MahabubNagar,Telangana..
Abstract:
Having lesser restrictions, more precision and being more solid are what makeamachine more
ideal. The controlling component of these frameworks makes them all the moreexceptional.
Various control framework guarantees that an accumulation of free PCs appears toclients as a
solitary controlling framework. It utilizes decentralized components or subsystemsto control
dispersed procedures. They offer adaptability, broadened gear life,straightforwardness of new
hardware reconciliation, and brought together support when utilizedin a modern domain . A few
propelled control frameworks of robots have been created in viewof existing control strategies or
new control procedures that have been expand on purposes .Thus, for productive and adaptable
preparing, the various control instrument is more than aneed. The openness and accessibility of
reasonable Visa measured single board PC, various mechanized and controlling framework that
has low powerutilization, quicker preparing capacity at a lower cost. The numerous control
arrangement ofrobots proposed in this paper coordinates the utilization of reasonable
instruments, availability,remote correspondence what's more, effectiveness of controlling
instrument.
KEYWORD’S:- Lpc2148,GSM module, Ultrasonic sensor, dc motor,l293d driver
I. INTRODUCTION
Now a days everything is interlinked with the cloud. Whatever the this happening most of the things by
using internet services. This is like era of wireless communication. We have to be in this part, so what we
21 | P a g e
application. By using this we can monitor our vehicles by sitting in the camp office, we can overcome the
sudden attacks of the opponents. This is works with the web application which is synchronized with GSM
modem.
EXSISTING SYSTEM
In past framework we used to control the vehicles through catches or sms ,advancementsto
control the movement are RF,XBEE,GSM.We don't have mishap avoidance in pastsystems,no
standard conventions are utilized ,less UI.
PROPOSED SYSTEM
The universe of controlling is an energizing field that has detonated with new
advancementswhere the Internet of Things (IoT) vision progresses toward becoming reality. This
paperproposes a numerous movement controlling instrument of an automated auto
utilizingARM7 which fills in as controlling module. Every gadget is remarkably identifiable by
thecontrolling programming which is the center idea of IoT. Customer deals with the exercisesof
the auto from remote or far off spots over the web by voice directions and UniversalWindows
Application and furthermore ready to get information and input. The primarycommitment of this
paper is that it use the effectiveness of robot's movement controllingframework in light of the
fact that mechanical auto can get immediate directions at oncefrom different sources which make
the moving framework more productive. Both gadgetand customer don't should be online in the
meantime. Directions and information are putaway in cloud benefit which conveys them when
the gadget is prepared to get. A GPSframework is joined consequently customers can follow the
auto. The framework hasultrasonic separation sensor for maintaining a strategic distance from
22 | P a g e
Block Diagram
Fig 1: block diagram
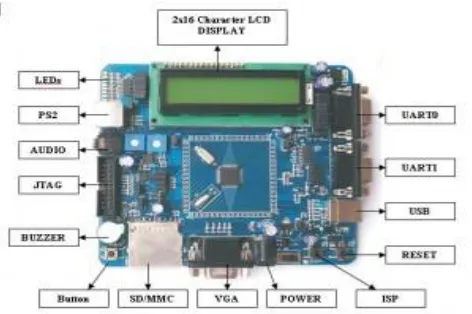
About Lpc2148 Microprocessor:
The LPC2148 microcontroller is an advanced one which is of ARM7 family. It’s is 32-bit ARMTDMI
having excellent features like 32kB to 512kB on chip flashmemory,8kB to 40kB static RAM, 10-bit
ADC, 64-I/O pins, 32-bit Timers with external event counter, watch dog timer, Real time clock,
EEPROM, 2-UART, 2-I2C busses, 1-SPI supports and advanced processor which is works with 12MHz
crystal frequency.
Fig 2 ARM7 LPC 2148 Development Board
LPC2148
Ultrasonic sensor
DRIVER IC 16x2 LCD Display
IOT Power supply
23 | P a g e
GSM (Global System for Mobile communications)
Fig 3. GSM module
GSM (Global System for Mobile interchanges) is a portable system, as a result of this
that cell phones associate with it through endeavoring to discover cells in the promptly region.
GSM systems work in 4 particular recurrence levels.Itsa low-cost, to the network supplier, opportunity
messagetransporter (SMS, in addition known as "printed content informing"), it diverse cell
prerequisites also. Another preferred standpoint is that the standard comprises of one universal
Emergency cellphone assortment, 112.entangled for worldwide vacationers to associate with
crisis contributions without understanding the area crisis assortment.
ULTRASONIC SENSOR:
24 | P a g e
This is used to detect the objects which comes infront . This generally works on thereflection process.
Transmitter always sends sound waves if any obstacle comes, it will detect based on receiver pulses.
This is generally like as Radar system.
L293D:
Fig 5. L293D-IC
L293D is an 16-pin IC used to drive the current in bi-directional at voltage of 4.5v to 36v. using this we
can operate 2 loads at a time. Its an high current gain device. In this project we used this to drive the
motors in two directions.
II. SOFTWARE DESIGN
In this project we are using two softwares especially for compilation and for programming into controller,
those are,
1. Keil uVision-4.
2 Flash magic Programmer.
The Keil is an IDE Embedded c Programming. First we need to import all libraries then while creating an
project should select required tools. After writing the source code we can compile and generate Hex file
without difficulties. Its an user-friendly tool. we will program the Hex file in microcontroller using flash
magic software.
WORKING DESCRIPTION
The primary saying of undertaking is to give driver less vehicles utilizing IOT . For thatwe favored
lpc2148 microcontroller to program. It is the extraordinary fitting controller for this.Program mode is
utilized for dumping of this framework into ARM processor from any outsideinstrument comprehensive
of PC. Run mode is utilized for the execution of utility. In thisframework we pre customized the
framework. At the point when the GSM module recognizedthen it gives data it will turn on the engines
25 | P a g e
directions from site page as per that directionsvehicle movement will be controlled, bombs will be
distinguished in the way utilizing metalidentifier put before the vehicle.
RESULT
The project “MULTIPLE MOTION CONTROL SYSTEM OF ROBOTIC CAR BASED ON IOT
TO CONTROL WEBPAGE” has been successfully designed, tested and implemented successfully.
Here we used various sensors and in last we finally got the result
Fig 6:hardware setup III. CONCLUSION
In this paper an effective methodology of different control framework is joined with IoT.Controlling
different gadgets in numerous ways makes causes more comfort in dealing witha framework. The cloud
benefit encourages the framework to diminish memory stack. Put awaymessages are naturally evacuated
after a specific measure of time. The execution resultsdemonstrate that if the consolidation is sufficiently
proficient, various controlling techniqueshave less impact on time and execution contrasted with single
method for control framework.However, the framework has a few restrictions. No video observation
framework has beenconsolidated. The remote range is too little.
REFERENCES
[1] V. Vujovi, M. Maksimovi, ―Raspberry Pi as a Sensor Web node for home
automation,‖Comput.Electr.Eng., vol. 44, pp. 153–171, 2014.
[2] S. Jain, A. Vaibhav, and L. Goyal, ―Raspberry Pi based Interactive Home Automation
26 | P a g e [3] J. Sobota, R. Psl, P. Balda, and M. Schlegel, ―Raspberry pi and arduino boards in control
education,‖ IFAC Proc. Vol., vol. 10, no. PART 1, pp. 7–12, 2013.
[4] M. S. Bin Bahrudin, R. A. Kassim, and N. Buniyamin, ―Development of Fire alarm system
usingRaspberry Pi and Arduino Uno,‖ 2013 Int. Conf. Electr. Electron.Syst. Eng. ICEESE 2013,
pp. 43–48,2013.
[5] K. Krasovitskaya, E. Cherkashin, and S. Gorunchik, ―Expert System for Structural Analysis
ofElectrocardiograms,‖ Int. Conf. Appl. Internet Inf. Technol., pp. 220–230, 2016.
[6] ―Distributed Control System (DCS) Information | Engineering 360.‖ Onine]. Available:
http://www.globalspec.com/learnmore/networking_communication_equipment/networking_equi
pment/distributed_control_system_dcs.
[7] ―Theory of Robot Control - Google Books.‖ [Online].
Available:https://books.google.com.bd/books?hl=en&lr=&id=5NnUBwAAQBAJ&oi=fnd&pg=
PR12&dq=robot+control+&ots=WRcW3pf_p&sig=hGTxIllfyxS082pmtHmmksqMvEg&redir_e
sc=y#v=onepage&q=robotcontrol&f=false.
[8] ―Azure Service Bus | Microsoft Azure.‖ [Online]. Available
https://azure.microsoft.com/enus/documentation/articles/service-busfundamentals-hybrid-solutions.
[9] ―ArduinoUltraSonic Range Finder: The best interfacing tutorial!‖ [Online]. Available:
http://diyhacking.com/arduino-ultrasonic-range finder/.
[10] X. Huang and L. Deng, ―An overview of modern speech recognition‖, Handb.Nat.Lang.,
pp.339–367, 2010.
[11] A. R. Krishna, G. S. Bala, A. Sastry, B. B. Sarma and G. S. Alia,"Design And
27 | P a g e
AUTHOR DETAILS
MADHURA 1,Pursuing M.Tech in Digital System and Computer Electronics (DSCE) from Sree Visvesvaraya Institute Of Technology and Science,Chowderpally (v),Mahabubnagar (D), telangana,
INDIA Pincode-509001.
T.SRIVANI 2, working as Assistant Professor in Electronics andCommunicationEngineering from Sree Visvesvaraya Institute Of Technology and Science,Chowderpally (v),Mahabubnagar(D), telangana,
INDIA., Pincode-509001
B.J.SUNIL 3,working as Associate Professor and Head of the Dept. in Electronics and
Communication Engineering Dept. from SreeVisvesvaraya Institute Of Technology and Science,