74 Available online at www.ijiere.com
International Journal of Innovative and Emerging
Research in Engineering
e-ISSN: 2394 – 3343 p-ISSN: 2394 – 5494
Smart Robots in library management system
(A Experimental approach )
Sundara mahalingam .V
a, Saravanan
bAravind
bTharini devi.R
ba Assistant Professor, Mechatronics Department, SKCET, Coimbatore, Tamil Nadu, India. bThiagarajer College of engineering, Madurai, Tamil Nadu, India
ABSTRACT:
In big libraries the management system is a big task. So the application of Robots make the library management system simple. The design of the system which helps to search & rearrange the books in library management & make it as fully automated. Our proposed work is to Model a Robot for smart library management with help of line follower robot. First the library model layout has been created. In our model layout we have total 4 Book Rack location & one decision zone for turn left or right. The plan is to use line follower FIRE BIRD V P89V51RD2 robot. Which is provided by E-yantra –IIT Bombay. Specification about FIRE BIRD “Platform – 8051 architecture based adaptor board, microcontroller is manufactured by Philips & programmed by Embedded C” The line follower robot use Black line to follow the path in library Model layout. In layout Rack position & Turn location identified by Block pass. The block pass is provided by setting a follow line as big square box. The block pass is used for two purpose one is stop at rack location & another one is turn left or right. We set block pass to stop a robot at corresponding rack locations & make a decision to turn left or right.so the path planning is successfully worked well.
Keywords: Library Management, Fire bird robot, Block Pass
I. INTRODUCTION
A robot is an electromechanical machine or artificial software agent. Compare to legged locomotion wheeled locomotion is require less degree of freedom. Wheeled locomotion is most suitable for smooth terrain. Our Library layout model is smooth terrain area. So we go with MOBILE ROBOT wheeled locomotion. So the path following robot is our choice for our application. We have used Fire Bird V will help us get acquainted with the world of robotics and embedded systems provided by E – Yantra Idea contest team.
Fig. 1. FIRE BIRD V P89V51RD2 Robotic research team.
75 What is line follower robot? It is a Machine which is built to follow a specific path as a line follower. Normally we use white or black line follower. Alternatively there is invisible line follower also available. Invisible means magnetic field as line follower. There we can find places where humans face troubles when they try to reach these places. In such situations we can use a machine which has the ability to take decisions as humans. A line follower is such a machine.
As the level 1 Engineering Design project we were instructed to create a line following robot which identify black path on the white surface and follow it, and also it should be able to make decisions itself to turn at a junction according to a mark situated before it.
A.) NEED OF LIBRARY MANAGEMENT AUTOMATION:
A library is a collection of information, sources, Resources, books, and services, and the structure in which it is housed. Apart from books many libraries are now also repositories and access points for maps, prints, or other documents on various storage media such as microform (microfilm/microfiche), audio tapes, CDs, LPs, cassettes, videotapes, and DVDs. Libraries have materials arranged in a specified order according to a library classification system, so that items may be located quickly and collections may be browsed efficiently. Reference stacks are different which has only reference books and only selected members. CDAC Library is a large one having 17,000 books and staffed by both paraprofessionals and professional librarians.
Circulation: handling user accounts and issuing/
Returning and shelving of materials.
Collection, development, order materials, maintain
Materials’ budgets.
Technical Services work behind the scenes cataloguing and processing new material and de accessioning weeded materials.
Basic tasks in library management include the planning of acquisitions of materials, arranging the acquired materials according to the library classification, preservation of material the de accessioning of materials, patron borrowing.
Human are not effective in library management because they are tired about repeated works which leads to some error. But robots make all the things very easy
This proposed work is make the library fully automated. For the automation we need an effective software such an implementation of IOT application. Library automation allows users to effectively operate all library process and activities in easy and convenient mode. We had found some software developer for our library management application.
Our plan is use this software to make customers/student can easily find/select/status of book due period without come to library. This things make them enable books ordered process digital.
Using of software’s let the student/customer know the journals/magazines in tech/non tech related available in library & also get suggestion from what they need new.
In our present work is perfect path planning so we list down some software for future application.
1. Lucidea integrated library system
2. Koha ILS
3. L4U
4. OPALS
5. LIBRIRAIN by CR2 technologies…etc...
B.) FIRE BIRD V:
Fire Bird V will help you get acquainted with the world of robotics and embedded systems. Thanks to its innovative architecture and adoption of the ‘Open Source Philosophy’ in its software and hardware design, you will be able to create and contribute to, complex applications that run on this platform, helping you acquire expertise as you spend more time with them. Fire Bird V is designed by NEX Robotics and Embedded Real-Time Systems lab, CSE IIT Bombay.
As a Universal Robotic Research Platform, Fire Bird V provides an excellent environment for experimentation, algorithm development and testing. Fire Bird V is evolved from Fire Bird IV and Fire Bird II which are being used in IIT Bombay to teach embedded systems and robotics. Its modular architecture allows you to control it using multiple processors such as 8051, AVR, PIC and ARM7 etc. Modular sensor pods can be mounted on the platform as dictated by intended applications. Precision position encoders makes it possible to have accurate position control. The platform can be upgraded to tank drive and Hexapod insect or any other desired form very easily. It is powered by high performance rechargeable NiMH batteries. A 2.4 GHz ZigBee module provides state of the art secure and multi-channel wireless communication up to a range of one kilometer.
C.) DEXTER ER2 ROBOTIC ARM :
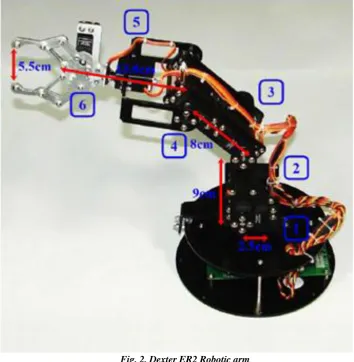
76 Fig. 2. Dexter ER2 Robotic arm
Robotic arm comes preassembled along with the Servo control card, Servo motion profile generator GUI, 5V-25A, 12V-5A SMPS and Flex sheets with polar and rectangular coordinate systems for the robotic arm. Servo motion profile generator GUI is used for quickly generating servo motion profile for the robot. GUI can access each servo motor individually in real-time. We can select individual servo motor’s velocity. We can also generate, edit and play motion sequence (motion profile) using GUI.
II. RELATEDWORKS
Recent library management process are not fully automated. We want introduce a system which fully make a library system automated with help of line follower robots.
Soundarya..M et al. Had explored a checking of books arrangement in the library racks with the help of robots operates by zigbee. They designed the robot using sensor operated motors to keep track the library book shelf arrangements. When the robot find the location of book it send the data to librarian system via zigbee to communicate & IR Barcode reader to identify the books. During process if any difficulties happen an alarm would be generated.
Mr.M.Elango.et.al would demonstrated a Robotic arm based library automation using haptic technology. Their objective work is just pick the object/book & place it on an exact location. The object picking & placing would identified by RFID reader. They had a plan a to apply this work in industrial area & public area
An easy way to comply with the conference paper formatting requirements is to use this document as a template and simply type your text into it.
A. OBJECTIVE:
Objective of the present work is to perform a line follower robot properly run on a library path which is predefined. To make it stop it exact position of rack location.
III.PROPOSEDLIBRARYMODELLAYOUT
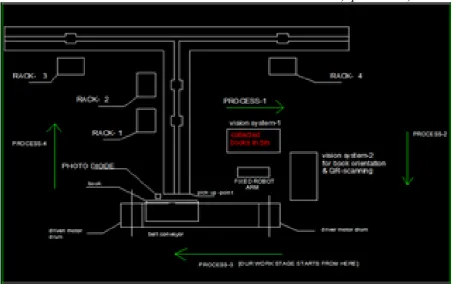
77 Fig. 3. Proposed library model layout
A. EXPLANAION OF PROPOSSED IDEA:
The section presents the operational sequences employed in this project in reference to the layout presented in figure3.
The sequences are:
Orientation of book for proper pick up Determination of book availability for pick
Identification of the place destination (Rack 1 or Rack 2) Manipulation and grasp of book from the conveyor Location of place destination
Manipulation and placement of book Reaching HOME position
1.) Orientation of book for proper pick up:
Orientation of the book is performed by machine vision system
Data of the book can be read by vision system with the help of QR-scanning.
The data’s about to send to the server system through wireless communication with the help of zigbee
The oriented book has been pick by fixed robot arm & place it in conveyor for next process. 2.) Determination of book availability for pick up:
The oriented book travel in belt conveyor, when its crossing photo diode near the conveyor. The photo diode senses the book & stops the conveyor to locate the exact pick up point
When the conveyor motion stop, a signal is generated to enable the pickup point & intimate the moving robot.
3.) Identification of the place destination (Rack 1 or Rack 2):
While pick up point enable & gets signal in moving robot, it receives data about the book from server system which could be done by QR-scanning
This could help where to place the book (Rack-1 or Rack-2)
Therefore the moving robot moves towards the pickup point from the home position. 4.) Manipulation and grasp of book from the conveyor:
The moving robot manipulates for proper grasp of book from conveyor, this could be done with help of programming.
5.) Location of place destination :
The location could be identified by the moving robot with help of receiving data about the book from the server
78 Finally the moving robot move towards the location point to place the book in a correct rack The moving robot is about to perform its process with help of line/path following process The line following concept helps to lead the exact location
In our concept we use “BLACK LINE” as a follower
Finally the moving robot reaches the exact book rack with help of line follower
Each rack is identified by a moving robot with the help of square box set (block pass) in Black line. In square box the moving robot turn 90 degree.
At each rack a delay has set in program to place the book 6.) Manipulation and placement of book:
Once reached the corresponding rack moving robot manipulates to place the book in the rack at a vertical position by rotating its gripper to 90 degree
At last the robot places the book in an exact place. 7.) Reaching HOME position:
After placing the book in a proper place, it takes again 90 degree rotation. And then move towards the home position
Finally reaches the home position & gets ready for the next task.
IV.STATUS OF THE CURRENT WORK
We considered the robot movements in line/path follower.
Made the robot to trace the Black line path and travels accordingly.
Sequence starts with the conveyor system. Robots were placed near the conveyor system as it needs to sense the book.
After robot picks the book, it tends to display as the "Pick Point" to recognize what's happening in and around (Vice versa for Place point too).
The identification of the home position & two rack position could be determined by the design of a square box (block pass) in the path.
At each rack location we have set delay to the robot to place the book.
After finishing this picking and placing tasks, the moving robot must turn and should travel to home position.
A.) Images of the proposed work :
Fig.4. Title of Eyantra Competition Fig.5.Line follower at Home position
79 Fig.8.Line follower at Rack two Location Fig.9. Line follower return to home position
B.) YOUTUBE LINKE OF THE PROPOSED WORK:
https://www.youtube.com/watch?v=N5zbCBovsjU&spfreload=5
V. CONCLUSIONS
At this stage, the operation of mobile platform has been implemented with the capability of book availability detection and movements between pick and place destinations. The robot movements are employed with help of line follower and able to display the respective destination’s location in LCD display. The manipulation of the books and grasping have to be implemented for the execution of the complete task.
The proposed work considers that the book is available with known orientation. The robot manipulates and grasps the book on its respective destination. Two place destinations have been considered for the robot execution. The curved bound area in book is used for robot’s grasp.
A.) FUTURE SCOPE :
In current stage we use only two racks now we are thinking to implement 4 racks in the next stage. Gripper is readily available & robot arm movement which should be mounted in a moving robot.
VI.REFERENCES
[1] Arumugaraja.M, GugaPriya B, Soundarya.M, “The Library Management Robot”, International Journal Of Engineering And Computer Science ISSN:2319-7242, Volume 3 Issue 3 March, 2014 Page No. 5008-5012.