S.Pavithra 23
OPTIMAL SAND MINING APPROACH USING IMAGE
PROCESSING TECHNIQUE
S.Pavithra1
1Project Associate, Centre for Computer science and engineering, Karupa Foundation Education and
Research Centre, Tamilnadu, India.
ABSTRACT : Sand mining is a procedure of extricating sand from shorelines, hills, or open pits .Due to a genuine ecological impact, for example, soil disintegration, loss of biodiversity, pollution of groundwater Segmentation and arrangement of sinkholes. This gives a point by point clarification about the evil impacts of mining on water assets and air quality. This framework incorporates ideal sand mining approach utilizing picture preparing This framework identifies vehicle utilizing static pictures and figuring the measure of sand conveyed to forestall misbehaviors of sand sneaking. Not the same as conventional strategies, which utilize machine figuring out how to recognize vehicles, this strategy presents another shape mapping model to discover critical "vehicle edges" for distinguishing vehicles. The sand can have different hues under various climate and lighting conditions. The proposed new shading division model has amazing abilities to distinguish sand pixels from foundation, despite the fact that the pixels are lit under changing enlightenments. The identified measure of sand is checked against the most extreme set edge esteem particular to the perceived vehicle. Trial results demonstrate that the incorporation of Hough components and shading picture division.
1. Introduction
The issue of Illicit sand mining is one of the real issues in creating countries. Weaker government strategies for mining prompts unlawful sand mining in rustic ranges. It is hard to stop such misbehaviors [1-4]. The advancement of innovation has given approaches to screen this issue. To put a keep an eye on such acts of neglect this paper displays an application created utilizing PC vision strategies. The proposed perceives vehicle sort and sections the unmistakable measure of sand present on the vehicle which is then contrasted with the greatest arrangement of sum conveyed by the vehicle [5-8].
We show another framework to distinguish vehicles from static picture and compute the measure of sand it is conveying [9-12].
It is a continuous based two-stage process. They are,
• Vehicle arrangement
• Sand identification
In the initial step the framework takes the side perspective picture and finds the quantity of tires and arranges the vehicle on the premise of number of tires. This data is exchanged to the database to get information containing the measure of sand the vehicle can convey. For the greater part of the cases the vehicles are weighed on a measuring machine to continue observing the measure of sand being mined and transported [13-19]. Be that as it may, there can be circumstances where the measuring frameworks might be messed around with. As an answer, we take the obtained pictures and section out the measure of sand obvious over the holder. The zone of the extricated part is figured and is coordinated against the set qualities from the database particular to the kind of vehicle.
The parameters for each vehicle incorporates,
S.Pavithra 24 • Maximum admissible unmistakable sand range over the vehicle's side boards as clarified in Figure 1
figure 1: explains the positioning of side panels and the visible area of sand concept.
To guarantee that the application is easy to use, the flexibility of acquiring pictures from any camera with determination more prominent than 5 Megapixels is given. The framework is created utilizing Open Computer Vision Libraries. The working stage must have least necessities as appeared in Table 1, along these lines the whole application can be ported onto any advanced mobile phone. The introduced framework is straightforward, financially savvy and computationally quick.
To conquer these inconveniences and to make the applications work with lesser assets we display a vehicle location framework which is altered to this specific circumstance. Since the client has the freedom to catch the picture, the side perspective and the back perspective are the inputs given by the client to the framework. After this the pictures are prepared utilizing a preprocessing calculation which adjusts the light states of the picture. The picture is then prepared through edge location and Hough discovery calculations to recognize and characterize the vehicle on the premise of number of tires and the compartment size both of which are predefined inside the framework.
The second part includes extraction of sand from the pictures. Picture division and article discovery is by utilizing the shading based division..
Table 1: Minimum System requirements for our application
.
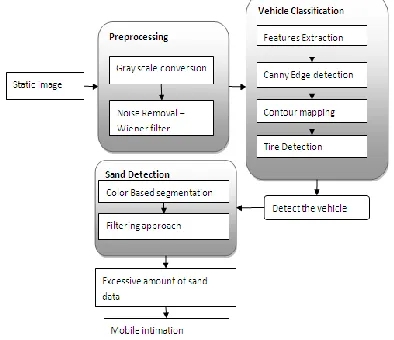
3.Proposed System
Both the image-processing systems have been designed for real-time implementation with minimal resource usage. This section is divided into two sub-sections, namely vehicle classification
figure 2: proposed system .
furthermore, division of sand. Both the areas incorporate into profundity clarification of the calculations utilized with delineations. Each progression clarified in the area is went with appropriate point of preference of it and additionally its impact in working of the whole framework.
3.1 Vehicle Classification
One of the primary points of this paper is to distinguish a vehicle from static pictures. Instead of utilizing any Machine learning techniques, a less difficult methodology of utilizing edges and shapes is utilized for
Processor >1GHz Camera
resolution
>8Megapixels
Web
Connectivity
S.Pavithra 25 recognition. Since the last execution is to be done on advanced mobile phones the calculation needs to utilize negligible assets while giving best results. Figure 2 demonstrates the stream outline of the procedure of vehicle location.
The smoothing necessity is typically communicated by the inspiration of the portion:
The perspective of such pieces is clearly the gaussian piece x. In light of present circumstances, Gh has standard deviation h and it is easily seen that:A equivalent result is truly honest to goodness for any positive winding piece with restricted distinction, so one can keep the gaussian case without loss of comprehensive proclamation. The primary gage is real if h is adequately little. However since the hullabaloo diminishing properties for this circumstance depend on the reality that the area required in the smoothing is sufficiently expansive, so that the clamor gets decreased by averaging. So in the accompanying we expect that h = k, where k remains for the quantity of tests of the capacity u and of the clamor in an interim of length h, k must be much bigger than 1 to guarantee the commotion diminishment. The impact of a gaussian smoothing on the commotion can be assessed at a reference pixel i = 0. At this pixel,
where we recall that n(x) is been interpolated as a piecewise function, the Pisquare pixels centered in i have size 2 and Gh(i) denotes the mean value of the function Gh on the pixel i. Denoting by Var(X) the variance of a random variable X, the additively of variances of independent centered random variables yields:
After the procedure of evening out the brilliance of the picture the yield picture gets to be hazy. The Wiener channel can evacuate the added substance commotion and rearrange the obscuring. A Low pass channel is not appropriate for this situation since it is
exceptionally delicate to added substance clamor. The Wiener channel is proposed to advance the exchange off between de-noising and backwards sifting. Clamor expulsion in past strides may prompt obscuring of edges. Tests demonstrate that a symmetric low-pass channel of size 7x7 with standard deviation of 0.5 productively reestablishes the surface example. This pre-preparing gives a de-noised pre-portioned picture. To abridge (and change over to 2D), given a framework:
where * signifies convolution and x is the (obscure) genuine picture h is the drive reaction of a direct, time-invariant channel v is added substance obscure commotion autonomous of x, and y is the watched spectral density of the input x, and N is the mean power spectral density of the noise v. The equation for G can be rewritten as:
So the Wiener channel has the reverse channel for H, additionally a recurrence subordinate term that constricts the increase taking into account the sign to clamor proportion.
Edges portray limits and subsequently convey key data of a picture. Edges in any picture comprise of territories with solid power contrasts i.e. a bounce in force starting with one pixel then onto the next. As demonstrated edge location in a picture essentially diminishes the measure of information to handle, while safeguarding the imperative auxiliary properties in a picture.
S.Pavithra 26 discover edge angle and bearing for every pixel as take after as follows
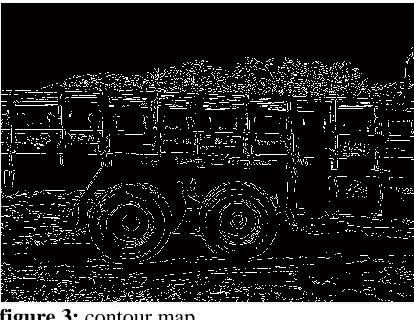
Subsequent to getting inclination greatness and bearing, a full output of picture is done to evacuate any undesirable pixels which may not constitute the edge. For this, at each pixel, pixel is checked in the event that it is a nearby greatest in its neighborhood toward inclination. The following stride expels any foundation edges which go about as clamor for the outcome. For this, we require two limit values. Any edges with power angle more than the most extreme limit are certain to be edges and those underneath least are certain to be non-edges, so are disposed of. Form information are an indispensable part of the application. Shapes can be clarified basically as bends going along with all the ceaseless focuses (along the limit), having same shading or force. .It helps in isolating the genuine information focuses from pointless foundation clamor. They encourage upgrade the nature of shapes that are to be distinguished as can be found in Figure 3
.
figure 3: contour map.
Once the edge data is extricated, the form mapping of the picture is done to further evacuate any superfluous edges and to delineate vehicle. Utilizing the form outline vehicle measurements can be removed and grouping can be done.
Hough Transform utilizes parametric representation for the group of all circles and changes every figure point in the undeniable way [17]. The established Hough change was produced to distinguish lines in the picture, yet later the Hough change stretched out to recognize the positions of self-assertive shapes, most regularly circles or ovals. Because of flaws in either the picture information or the edge identifier, however a few focuses or pixels on the wanted bends are missed. Likewise there are spatial deviations between the perfect circle and boisterous edge focuses are gotten from the edge finder. Consequently, it is frequently non-insignificant to bunch the removed edge elements to a fitting arrangement of circles. Our method addresses this issue by making it conceivable to perform groupings of edge focuses into article hopefuls by performing an unequivocal voting methodology over an arrangement of parameterized picture objects as can be seen from Figure 4. A circle is completely characterized with three parameters: the middle organizes (a, b) and the sweep (R):
figure 4: tire detection.
As Ө shifts from 0 to 360, a complete circle of sweep R is made. So the change capacity searches for triplets of (x, y, R) from the picture. Subsequently, we have to build a 3D collector for Hough change, which would be very inadequate. Along these lines, we utilize a trickier strategy, Hough Gradient Method which utilizes the slope data of edges. In any case, the technique additionally incorporates concealed circles which are intended to be seen as circles.
S.Pavithra 27 excessive number of roundabout components. Along these lines, to be more fruitful, the preprocessing connected is a pivotal stride.
3.2Segmentation of Sand
The initial step is Image procurement. Two pictures of the vehicle conveying sand is caught. These pictures incorporate the side and back perspective of the vehicle. The reason for getting these two perspectives is to guarantee a double check process on the amount estimation of the sand conveyed by the vehicle. The following stride is Down examining the pictures. The 2D territory of the sand in both the perspectives is coordinated against a set edge esteem. This limit quality is liable to the kind of the truck and the perspective. To keep a typical base for testing the territory the picture is down inspected to a width of 500 pixels and stature of 500 pixels. The limit qualities are gotten from an arrangement of preparing pictures and the procedure is clarified later in the paper. The entire explanation behind down examining is to make an entrance picture that is a scaled down copy of the optical determination of expert output. In the event that the picture signal and the picture commotion had comparative properties, averaging neighboring pixels with a specific end goal to decrease the determination would not enhance the sign to-clamor proportion. Be that as it may, flag and clamor have diverse properties. In any case, in this paper the real reason is to build sign to clamor proportion [18].
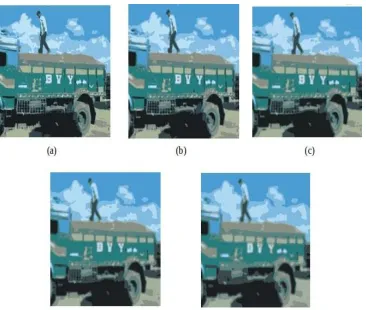
The progression took after by Down examining the pictures is Application of morphological operations. The division calculation utilized as a part of this application is K-Means grouping. To guarantee flawless grouping, sharpness of the picture must be lessened and segments must develop out as more associated. This is encouraged by the two morphological administrators, in particular, enlarge and disintegrate. The significance of this progression can be comprehended from Figure 5. The sub-pictures from Figure 5.(a) to Figure 5.(e) are exploratory yields with
various blends of morphological operations. Figure 5.(a) is the yield of grouping with no morphological pre-preparing operation, Figure 5.(b) was the yield when just enlargement operation was connected, Figure 5.(c) was the yield when just disintegration operation was connected. A locale of interest highlighted in the sub-pictures (a) to (c) of Figure 5, delineates the wasteful bunching result. Indeed, even the request of utilizing the two administrators is critical. In the same figure, it can be seen in (e) that smooth bunching yield is gotten when enlarge operation is trailed by disintegrate, while then again, sporadic grouping yield is acquired when dissolve operation is trailed by widen operation.
The piece size utilized for both the morphological operations is of width 3 px and stature 3 px. Another critical parameter identified with these operations is the quantity of emphasess. In the application the worth for this parameters is 1, as it can be seen from Figure 6 that as the quantity of cycles expand, the grouping of picture decays. In figure 6, the quantity of emphasess is 1 in (a), 3 in (b), 5 in (c) and 7 in (d).
S.Pavithra 28 image is transformed into HSV format. The step following is thresholding. In this step a pre-obtained threshold level for the H, S, and V values is put against the transformed test image. The purpose is to extract all the sand pixels that are over the vehicle. To ensure that the sand pixels other than the required, i.e., over the vehicle’s tires or that on the ground level are detected, the thresholding is carried over a specific region of interest. The region of interest (rectangular) for a side view has properties.
The progression taking after is thresholding. In this progression a pre-acquired edge level for the H, S, and V qualities is set against the changed test picture. The reason for existing is to concentrate all the sand pixels that are over the vehicle. To guarantee that the sand pixels other than the required, i.e., over the vehicle's tires or that on the ground level are distinguished, the thresholding is extended a particular locale of interest. The district of interest (rectangular) for a side perspective has properties appeared .
The qualities are gotten over experimentation. The edge values have been set in the wake of comprehension the distinctive slopes in the shade of sand at various locales, climate conditions and lighting conditions. The set worth capacities in a manner that every one of the pixels with H somewhere around 0 and 160, S somewhere around 0 and 50, V somewhere around 0 and 200 are separated out and marked as sand pixels.
The last stride in the proposed methodology is Correction Algorithm. The point of this progression is to evacuate the undesired and false recognitions by abusing the associated way of the sand present in the picture. An all-locale clear stores the information of the pixels which are most enlightened according to the bunching calculation. The range is isolated on the premise of columns. A specific column is chosen and in that line, any pixel in the edge reach is named as white and the rest as dark. For any line if [white/(white+black)] <= 0.48, then every one of the pixels in that line named as sand pixels are rejected.
This methodology evacuates 93% of the false positive fixes and gives a steady identification as it can be found in Figure 11. In the Figure 11.(a), the district of false location is highlighted, and Figure 11.(b) is prepared out by applying the Correction calculation
figure 4: advantage of the correction algorithm.
The whole division calculation is appeared in Figure 12 as a stream diagram position.
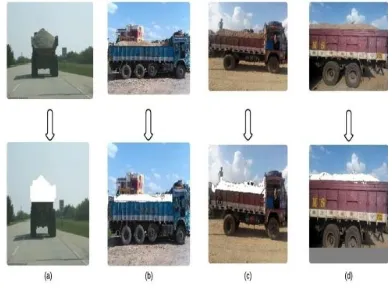
S.Pavithra 29 appeared in Figure 13 after identification the trucks are ordered into one of the accompanying classes: Large, Medium or Small. After the procedure of grouping the info picture is encouraged into the sand discover calculation.
figure 5: vehicle classification.
the robust sand detection results are shown in figure 13. the preset threshold values determine whether the vehicle is overloaded or not. experimental results suggest that in sub-images 13. (a) and 13.(c) the vehicle is carrying sand beyond the maximum capacity while in 13.(b) and 13.(d) it is well within the limits.
figure 6: results of sand detection
4. Conclusiom
In this paper a vehicle order and sand location calculation is introduced. The framework displayed in this paper gives a layer of reflection to the client which disentangles the entire procedure of actualizing and utilizing the application. The client is given a black box which can take, as info, the side and front perspective of the vehicle and give the vehicle sort and the measure of sand present as yield. The calculation created here is sans mistake despite the fact that a considerable measure of variability in the catching conditions go about as deterrents. Since it can well record diverse changes of vehicle appearances, coveted
vehicles can be precisely and adequately distinguished from static pictures. However there is still a considerable measure of degree for advancement. The calculation exhibited can be utilized to create applications with negligible equipment necessities. The adaptability of such an application is unending and such frameworks can be utilized to a few different commercial enterprises.
5. References
[1] Akash Deep Singh,Abishek Kumar annamraju “ a novel system to monitor illegal sand mining using contour mapping and color based image segmentation”[march 2015] [2] Ojos Negros Research Group. “Sand
Mining Impacts” USENET:
http://threeissues.sdsu.edu/three_issues_sandm iningfacts01.html. [April. 29, 2015].
[3] Shi Na, Guan Yong and Liu Xumin, “Research on k-means Clustering Algorithm: An Improved k-means Clustering Algorithm,” in Third International Symposium on Intelligent Information Technology and Security Informatics, 2010, pp. 63-67.
[4] Rajesh A. Jadav , Shailesh S. Patel, “Application of Singular Value Decomposition in Image Processing”, Indian journal of science and technology, Volume 3, Issue 2, February 2010.
[5] Yan, Gao, et al. "Comparison of pixel‐ based and object‐ oriented image classification approaches—a case study in a coal fire area, Wuda, Inner Mongolia, China." International Journal of Remote Sensing 27.18 (2006): 4039-4055.
[6] Yan, G., Mas, J. F., Maathuis, B. H. P., Xiangmin, Z., & Van Dijk, P. M. (2006).
Comparison of pixel‐ based and
object‐ oriented image classification
approaches—a case study in a coal fire area, Wuda, Inner Mongolia, China. International Journal of Remote Sensing, 27(18), 4039-4055.
[7] Yan, Gao, J‐ F. Mas, B. H. P. Maathuis, Zhang Xiangmin, and P. M. Van Dijk.
"Comparison of pixel‐ based and
object‐ oriented image classification
S.Pavithra 30 [8] Yan, G., Mas, J.F., Maathuis, B.H.P., Xiangmin, Z. and Van Dijk, P.M., 2006.
Comparison of pixel‐ based and
object‐ oriented image classification
approaches—a case study in a coal fire area, Wuda, Inner Mongolia, China. International Journal of Remote Sensing, 27(18), pp.4039-4055.
[9] Yan G, Mas JF, Maathuis BH, Xiangmin Z, Van Dijk PM. Comparison of pixel‐ based and
object‐ oriented image classification
approaches—a case study in a coal fire area, Wuda, Inner Mongolia, China. International Journal of Remote Sensing. 2006 Sep 1;27(18):4039-55.
[10] Llewellyn, R. J., S. K. Yick, and K. F. Dolman. "Scouring erosion resistance of metallic materials used in slurry pump service." Wear 256.6 (2004): 592-599.
[11] Llewellyn, R. J., Yick, S. K., & Dolman, K. F. (2004). Scouring erosion resistance of metallic materials used in slurry pump service. Wear, 256(6), 592-599.
[12] Llewellyn, R. J., S. K. Yick, and K. F. Dolman. "Scouring erosion resistance of metallic materials used in slurry pump service." Wear 256, no. 6 (2004): 592-599. [13] Llewellyn, R.J., Yick, S.K. and Dolman, K.F., 2004. Scouring erosion resistance of metallic materials used in slurry pump service. Wear, 256(6), pp.592-599.
[14] Sampath, R., and A. Saradha. "Alzheimer's Disease Image Segmentation with Self-Organizing Map Network." JSW 10.6 (2015): 670-680.
[15] Sampath, R., and Dr A. Saradha.
"Classification of Alzheimer Disease Stages Exploiting an ANFIS Classifier." International
Journal of Applied Engineering
Research.[Electronic] 9.22 (2014): 16979-16990. [16] Sampath, R., and J. Indumathi. "Earlier detection of Alzheimer disease using N-fold cross validation approach." Journal of medical systems 42.11 (2018): 217.
[17] Sampath, R., et al. "STUDY OF
CONNECTIVITY PROPERTIES AND
NETWORK TOPOLOGY FOR
NEUROIMAGING CLASSIFICATION BY
USING ADAPTIVE NERO-FUZZY
INFERENCE SYSTEM." (2006).
[18] Sampath, R., and Dr A. Saradha. “A Hybrid approach for Alzheimer’s disease Classification using 2D Gabor Wavelet transform and Extreme Machine Learning Classifier” JOURNAL OF PURE AND APPLIED MICROBIOLOGY Vol9. 5 .2015
[19] Sampath, R., and Dr A. Saradha