R E S E A R C H
Open Access
Delay-dependent exponential
H
∞
filter
for uncertain nonlinear singular time-delay
systems through T-S fuzzy model
Yuechao Ma and Menghua Chen
**Correspondence:
[email protected] College of science, Yanshan University, 438 Hebeidajie Road, Qinhuangdao, P.R. China
Abstract
In this paper, the problem of delay-dependent exponentialH∞filter is investigated for uncertain nonlinear singular systems with interval time-varying delay through T-S fuzzy model. A new Lyapunov-Krasovskii functional (LKF) is constructed by
considering triple integral and the left and right endpoints of the time-delay to obtain a less conservative condition, which can guarantee that the error system is not only exponentially admissible but also satisfying a prescribedH∞performance. Then, by solving the linear matrix inequalities (LMIs), the filter parameter matrices can be obtained. In the end, some numerical simulations are given to illustrate the effectiveness and the benefits of the methods.
Keywords: nonlinear singular systems; interval time-varying delay; exponentially stable; T-S fuzzy model;H∞filter
1 Introduction
Filter design is one of the fundamental problems in various engineering applications, espe-cially in the fields of signal processing and control communities. In order to obtain the de-sired signal and eliminate interference, the method ofH∞filter is very appropriate to some
practical applications, and there has been considerable attention toH∞filter problems for
dynamic systems. Non-fragileH∞filter was designed for discrete-time fuzzy systems with multiplicative gain variations in []. RobustH∞filtering for a class of uncertain linear
sys-tems with time-varying delay was studied in []. Delay-dependent robustH∞filter for T-S
fuzzy time-delay systems with exponential stability was proposed in []. ExponentialH∞
filtering for time-varying delay systems was studied through Markovian approach in []. Singular systems have extensive applications in electrical circuits, power systems, eco-nomics and other areas, so the filtering of a singular system is especially important and has been extensively studied [, ]. ExponentialH∞filtering for singular systems with
Marko-vian jump parameters was put forward in [].H∞ filtering for a class of discrete-time singular Markovian jump systems with time-varying delays was designed in []. In [], the problem of exponentialH∞ filtering was studied for discrete-time switched singular
time-delay systems.
On the other hand, time delay is frequently one of the main causes of instability and poor performance of systems, and it is encountered in a variety of engineering systems such as
[–, –]. But many of the results are about constant time-delay, in practice, which is conservative to some extent. Recently, interval time-varying delay has been identified in practical engineering systems. Interval time-varying delay is a time delay that varies in an interval in which the lower bound is not restricted to be zero. For more details, we refer readers to [–].
In the past two decades, the T-S fuzzy model has been used to represent many nonlin-ear systems. And practice has proved that the T-S fuzzy model is very effective to simplify many complex systems. In [], the filter was designed through discrete-time singularly perturbed T-S fuzzy model. For T-S fuzzy discrete-time systems,H∞descriptor fault
de-tection filter was designed in []. New results on H∞ filtering for fuzzy systems with
interval time-varying delays were obtained in []. However, to the authors’ knowledge, the problem of delay-dependent exponentialH∞filter for nonlinear singular systems with
interval time-varying delay through T-S fuzzy model has rarely been reported.
Motivated by the above discussions, the problem of delay-dependent exponentialH∞
filter for nonlinear singular systems with interval time-varying delay through T-S fuzzy mode is considered in this paper. The main constructions of this paper can be concluded as follows. () The triple integral was taken into account when constructing the LKF, which can reduce the conservatism effectively. () The use of Lemma refines the delay interval, which is the other reason why the result is less conservative. () The parameters of the filter can be obtained by solving the LMIs. () The comparisons with other references are listed in the form of tables, which can clearly show the advantage of the proposed method in this paper.
2 Preliminaries
Consider the following nonlinear system with interval time-varying delay which could be approximated by a T-S singular model withrplant rules.
Plant rulei: Ifξ(t) isMiandξ(t) isMi· · · ξp(t) isMpi, then
Ex˙(t) = (Ai+Ai)x(t) + (Ai+Ai)x
t–d(t)+ (Bi+Bi)ω(t), y(t) = (Ci+Ci)x(t) + (Ci+Ci)x
t–d(t)+ (Di+Di)ω(t), z(t) = (Li+Li)x(t) + (Li+Li)x
t–d(t),
x(t) =φ(t), t∈[–d, ],
()
whereMijdenotes the fuzzy sets;rdenotes the number of model rules;x(t)∈Rnis the
input vector;y(t)∈Rqis the measurement;z(t)∈Rpis the signal to be estimated;w(t)∈Rm
is the noise signal vector;φ(t) is a compatible vector valued initial function;Eis a singular matrix and assume thatrankE=r≤n;Ai,Ai,Bi,Ci,Ci,Di,Li,Liare constant matrices
with appropriate dimensions;ξ(t),ξ(t), . . . ,ξp(t) are the functions of state variables;d(t) is
time-varying delay and satisfies
≤d≤d(t)≤d, d˙(t)≤μ;
Ai,Ai,Bi,Ci,Ci,Di,Li,Liare unknown matrices describing the model
unknown real time-varying matrix satisfying
FiTFi≤I. ()
The parametric uncertaintiesAi,Ai,Bi,Ci,Ci,Di,Li,Liare said to
be admissible if both () and () hold.
Letε(t) = [ε(t)ε(t)· · ·εp(t)]T, by using a center-average defuzzifier, product fuzzy
in-ference and singleton fuzzifier, the global model of the system is as follows:
Ex˙(t) =
In this paper, we consider the following delay-dependent fuzzy filter:
Ex˙ˆ(t) =
the filter matrices with appropriate dimensions, which are to be designed.
Remark WhenE=IandCfi= , the fuzzy filter () was studied in [], which is
time-independent filter. The simulations will demonstrate the advantage in this paper. The filtering error system from () and () can be described by
where
System () is simply denoted by the following form:
¯
Definition The filtering error system () is said to be exponentially admissible if it sat-isfies the following:
(a) The augmented system () withw(t) = is said to be regular and impulse-free if the pair(E¯,A˜),(E¯,A˜+A˜d)is regular and impulse-free;
(b) The filtering error system () is said to be exponentially stable if there exist scalars δ> andλ> such thatx(t) ≤δe–λtφ(θ)d
, whereφ(θ)d=sup–d≤θ≤|φ(θ)| and| · |is the Euclidean norm inRn. When the above inequality is satisfied,λ,σ and e–λtφ(θ)d
are called the decay rate, the decay coefficient and an upper bound of
the state trajectories, respectively.
Lemma For any symmetric positive-definite constant matrices M> and any constant matrix E∈Rn×n,and scalars d
>d> ,if there exists a vector functionx˙(·) : [–d, ]→Rn
such that the following integration is well defined,then it holds that
–d
–d
–d
–d
t
t+θ
Ex˙(t)TMEx˙(t)ds dθ
≤
x(t)
t–d t–d x(s)ds
T
–d
ETME dETME
dETME –ETME
x(t)
t–d t–d x(s)ds
.
Proof Notice that
(Ex˙(t))TMEx˙(t) (Ex˙(t))T
Ex˙(t) M–
=
(Ex˙(t))TM/
M–/
M/Ex˙(t) M–/
≥.
Hence,
–d
–d
t
t+θ(Ex˙(t))
T
MEx˙(t)ds dθ –d
–d
t
t+θ(Ex˙(t))
T ds dθ –d
–d
t
t+θ(Ex˙(t))ds dθ
–d
–d
t t+θM
–ds dθ
≥.
Using Schur complements and some simple manipulation, the lemma can be obtained.
Lemma ([]) Suppose that a positive continuous function f(t)satisfies f(t)≤ς sup
t–τ≤s≤t
f(s) +ςe–εt,
whereε> ,ς< ,ς> andτ> .Then f(t)satisfies
f(t)≤ sup –τ≤s≤
f(s)e–ξt+ ςe
–ξt
–ςeξτ
,
whereξ=min{ε,ξ}and <ξ< –(/τ)lnς.
Lemma ([]) Given a set of suited dimension real matrices Q,H,E,Q is a symmetric matrix such that Q+HFE+ETFTHT < for all F satisfies FTF≤I if and only if there existsε> such that
Q+εHHT+ε–ETE< .
Aims of this paper The exponentialH∞filter problem to be addressed in this paper is
for-mulated as follows: given the uncertain time-delay T-S fuzzy system () and a prescribed level of noise attenuationγ > , determine an exponentially stable filter in the form of () such that the following requirements are satisfied:
(a) The filtering error system () is exponentially admissible;
(b) Under zero initial conditions, the filtering error system () satisfies
3 Main results
3.1 Exponential stability andH∞performance analysis
Theorem For prescribed scalar≤μ< ,system()is exponentially admissible with H∞ performance γ for any time delay d(t)satisfying ≤d≤d(t)≤d if there exist
Proof Firstly, we prove that system () is regular and impulse-free. We choose two non-singular matricesUandV, note that
On the other hand, via the Schur complement, it can be seen from () that< ,
pre-multiplying and post-pre-multiplying it, by [I I I I] and its transposition, we can get
PT(A˜+A˜d) + ˜
AT+A˜TdP+Z< ,
together withZ> , which impliesA˜andA˜dare non-singular. Hence, the pair (E¯,A˜) and
(E¯,A˜+A˜d) is regular and impulse-free. According to Definition , system () is regular and
impulse-free.
Next, we show the exponential stability of system (). Choose the following Lyapunov functional
V(x˜t) =
i=
Vi(x˜t), ()
where
V(x˜t) =x˜T(t)E¯ T
Px˜(t),
V(x˜t) =
t
t–d ˜
xT(s)Qx˜(s)ds+ t–d
t–d ˜
xT(s)Qx˜(s)ds+ t–d
t–d(t)
˜
xT(s)Qx˜(s)ds,
V(x˜t) =d
–d
t
t+θ
˙˜
xT(s)E¯TZE¯x˙˜(s)ds dθ+d –d
–d
t
t+θ
˙˜
xT(s)E¯TZE¯x˙˜(s)ds dθ,
V(x˜t) =d
–d
t
t+θ
˜
xT(s)Zx˜(s)ds dθ+d –d
–d
t
t+θ
˜
xT(s)Zx˜(s)ds dθ,
V(x˜t) = d
–d
θ
t
t+λ
˙˜
xT(s)ER¯ E¯x˙˜(s)ds dλdθ
+ds
–d
–d
θ
t
t+λ
˙˜
xT(s)E¯TRE¯x˙˜(s)ds dλdθ,
wherex˜t=x˜(t+α), –d≤α≤.
Then the time-derivative ofV(x˜t) along the solution of system () gives ˙
V(x˜t) = x˜T(t)E¯TPx˙˜(t), ˙
V(x˜t)≤ ˜xT(t)Qx˜(t) +x˜T(t–d)(–Q+Q+Q)x˜(t–d)
–x˜T(t–d)Qx˜(t–d) – ( –μ)x˜T
t–d(t)Qx˜
t–d(t),
˙
V(x˜t) =x˙˜ T
(t)E¯TdZ+dZ ¯
Ex˙˜(t) –d t
t–d ˙˜
xT(s)E¯TZE¯x˙˜(s)ds
–d t–d
t–d ˙˜
xT(s)E¯TZE¯x˙˜(s)ds,
˙
V(x˜t) =x˜T(t)
dZ+dZ
˜ x(t) –d
t
t–d ˜
xT(s)Zx˜(s)ds
–d t–d
t–d ˜
˙
Taking into account the lemma (Jensen’s integral inequality), Lemma and Lemma , we get
Then we have
=
Now, we have
d
Integrating both sides from toT> gives
eεTV(x˜T) –V(x˜) = (εδ–δ)
By interchanging the integration sequence, we can get that
T
there exists a scalarκ> such that
It is not difficult to see that, for anyT> ,
V(x˜T)≤κe–εTφ(θ)d
. ()
Note that the regularity and the absence of impulses of the pair (E,A˜) imply that there always exist two non-singular matricesMandNsuch that
MEN¯ =
Ir
, MAN˜ =
A
In–r
, ()
MA˜dN=
Ad Ad
Ad Ad
, M–TPN=
P P
P P
,
NTQN=
Q Q
QT
Q
.
()
Substituting the partition into () yields thatP> ,P= .
Define
ε(t) =
ε(t) ε(t)
=N–x˜(t). ()
Using the expressions in (), () and (), system () can be written as
˙
ε(t) =Aε(t) +Adε
t–d(t)+Adε
t–d(t), =ε(t) +Adε
t–d(t)+Adε
t–d(t).
()
It is easy to show that
V(x˜t,t)≥ ˜xT(t)E¯TPx˜(t) =x˜T(t)N–T
NTE¯TMTM–TPNN–x˜(t)
=εT(t)
Ir
P P
P P
ε(t) =εT(t)Pε(t)≥
P– ε(t)
.
Hence, for anyt≥d,
ε(t)≤P–κe–εTφ(θ)d
. ()
Defineς(t) =Adε(t–d(t)), then from () a scalarm> can be found such that for
anyt> ,ς(t)≤me–εtφ(θ)
d.
To study the exponential stability ofε(t), we construct a function as
J(t) =εT(t)Qε(t) –εT
t–d(t)Qε
t–d(t). ()
By pre-multiplying the second equation of () withεT(t)PT, we obtain that
=εT(t)PTε(t) +εT(t)PTAdε
Adding () in () and using Lemma yields that
J(t) =εT(t)PT+P+Q
ε(t) + εT(t)PTAdε
t–d(t) –εTt–d(t)Qεt–d(t)+ εT(t)PTς(t)
≤
ε(t) ε(t–d(t))
T PT
+P+Q PTAd
∗ –Q
ε(t) ε(t–d(t))
+γεT(t)ε(t) +γ–ςT(t)PTPς(t), ()
whereγis any positive scalar.
Pre-multiplying and post-multiplying
∗
< ,
by
N
N
T
and
N
N
,
respectively, a scalarγ> can be found such that
PT
+P+Q PTAd
∗ –Q
≤–
γI
.
Then
J(t)≤(γ–γ)εT(t)ε(t) +γ–ςT(t)PPTς(t).
On the other hand, sinceγcan be chosen arbitrarily,γcan be chosen small enough
such thatγ–γ> . Then a scalarγ> can always be found such that
Q– (γ–γ)I≥γQ. ()
It follows from (), () and () that
εT(t)Qε(t)≤γ–εT
t–d(t)Qε
t–d(t)+ (γγ)–ςT(t)PPTς(t),
which infers f(t)≤γ–supt–d
≤s≤tf(s) +τe
–σt, where <σ < min{ε,d–lnγ
}, f(t) = εT(t)Qε(t) andτ = (γγ)–mPφ(t)d.
Therefore, applying Lemma , we can obtain that
ε(t)≤λ–min(Q)λmax(Q)e–σtε(t)+
λ–min(Q)τe–σt
–γ–eσd ,
Finally, we show that for any nonzero ω(t)∈L[,∞), system () satisfies e(t) < γω(t)under the zero initial condition.
Observing (), we have
˙
V(x˜t) +eT(t)e(t) –γωT(t)ω(t) < .
Integrating both sides from toT> gives
V(T) –V() +
T
e(t)dt–
T
γω(t)dt< .
SinceV() = , whenT→ ∞, we have
∞
e(t)dt<
∞
γω(t)dt,
which implies e(t)<γω(t) for any nonzero ω(t)∈L[,∞). This completes the
proof.
Remark It should be pointed out that LKF () is chosen here based on triple integral and both left and right endpoints of the time-varying delay interval, which will decrease the conservatism.
Remark In [],–htt+θξ˙T(s)Zξ˙(s)ds dθ was estimated as
hξ˙T(t)Zξ˙(t) –
t
t–d(t)
˙
ξT(s)Zξ˙(s)ds,
and the term –tt––hd(t)ξ˙T(s)Zξ˙(s)dswas ignored, which may lead to considerable conser-vativeness. In this paper, by using Lemma , the shortcoming can be avoided and a less conservative result can be obtained.
3.2 Delay-dependent filter design
Based on the sufficient conditions above, the design problem of robustH∞filter can be
transformed into a problem of LMIs.
Theorem Given a finite scalarγ > ,the exponential H∞ filter problem is solved for system()if there exist constant scalarsεij> ,symmetric matrix
Q,
Q,
Q,
R,
R,
Z,
Z,and matrix P=diag(P,P),P> ,such that
ETP=PTE≥, ETP=PTE≥, ()
ii< , i= , , . . . ,r,
ij+ji< , i<j,i,j= , , . . . ,r,
()
where
ij=
⎡ ⎢ ⎣
ij εijT
∗ –εijI ∗ ∗ –εijI
⎤ ⎥
⎦, ij=
⎡ ⎢ ⎣
ij ij ij ∗ ij ∗ ∗ ij
Then we have
and other items are defined in Theorem . Based on () and from Lemma , we obtain that
ij=ηFiη+ηTFiTηT≤ε–ijηηT+εijηTη,
Via the Schur complement, we obtain that
It can be easily shown that inequality () equals the following condition:
r
i=
hiε(t)ii+ r
i<j hi
ε(t)hj
ε(t)(ji+ij) < .
LetQ=Wˆ–,M
i=PTAfi,Mi=PTBfi,Mi=PTCfi, and then it leads to LMIs (). This
completes the proof.
The parameters of theH∞filter are given by
Afi=
P–TMi, Bfi=
P– TMi, Cfi=
P–TMi, Lfi.
4 Numerical value examples
Example In order to show the advantage of the proposed method in this paper, we consider the time-delay T-S fuzzy systems as the system shown in Example in [] with two rules:
IFxisWi(i= , ), THEN
Ex˙(t) = (Ai+Ai)x(t) + (Adi+Adi)x
t–d(t)+ (Bi+Bi)ω(t), y(t) = (Ci+Ci)x(t) + (Cdi+Cdi)x
t–d(t)+ (Di+Di)ω(t), z(t) = (Li+Li)x(t) + (Ldi+Ldi)x
t–d(t),
where
A=
. –.
, A=
. –.
, Ad=
. –. .
,
Ad=
. .
, B=
, B=
, C= [ ],
Cd= [–. .], C= [. –.], Cd= [–. .],
L=D= [–. .], L=D= [–. ],
H=
. –.
, H=H=
. –.
, H=
–. .
,
H=H=
–. .
, H=H=
–. .
,
E=E=E= [–. .], E= [–. .],
E=E= [. –.], E= [–. –.],
E= [–. .], E= [–. .], E= [. –.].
Then consider thatEis singular, suppose
E=
. . .
,
and letμ= ,d= ,d= ,γ= . The filter parameters can be obtained as follows:
Af=
–. . –. –.
, Af=
–. . –. –.
,
Bf=
. .
, Bf=
–. .
,
Cf=
–. –. –. –.
, Cf=
. . –. –.
,
Lf= [. .], Lf= [–. –.].
However, it cannot be solved by criterion in [] because of the emergence of the impulse phenomenon. Based on the discussion above, the results obtained in this paper are more widely applicable and less conservative.
Example Consider the example in [] with two fuzzy rules and without uncertainties: IFxisWi(i= , ), THEN
˙
x(t) =Aix(t) +Adix
t–d(t)+Biω(t), y(t) =Cix(t) +Cdix
t–d(t)+Diω(t), z(t) =Eix(t) +Edix
t–d(t),
where
A=
–. . –
, A=
–. –. –.
, Ad=
–. . –. –.
,
Ad=
–. –. –.
, B=
–.
, B=
. .
, C= [ ],
C= [. –.], Cd= [–. .], Cd= [–. ],
D= ., D= –., E= [ –.], E= [–. .],
Ed= [. ], Ed= [ .].
Let the fuzzy weighting functions beh(θ(t)) =sin(t) andh(θ(t)) =cos(t). Forσ= in
[], Table gives different values ofdand yields minimumγ ford= ,μ= .. From
Table 1 The minimumγ with differentd2(Example 2)
d2 0.5 0.6 0.8 1
[17] 0.38 0.43 0.83 2.22 [19] 0.27 0.31 0.58 1.57 Theorem 2 0.14 0.27 0.42 1.44
Table 2 Comparison of minimumγ(Example 3)
Method [21] [19] [20] This paper
γ 0.7 0.4338 0.3449 0.2748
Figure 1 Tunnel diode circuit (Example 4).
Example Consider TS fuzzy system () without uncertainties and the fuzzy ruler= in [], the parameters are as follows:
A=
–. . –
, A=
–. . –. –.
, A=
–. –. –.
,
A=
–. –. –.
, B=
–.
, B=
. .
, C= [ ],
C= [–. .], C= [. –.], C= [–. ],
D= ., D= –., L= [ –.], L= [–. .],
L= [. ], L= [ .].
Setd= ,d= .,μ= .. Table lists the comparison results of the minimum ofγ
with [–] (δ= ).
From the comparison, it is clear that the minimumγ obtained in this paper is smaller. It has to be mentioned that the value ofγ depends on the parameterδin [–]; however,
δis not easy to determine. In this paper, this drawback can be avoided.
To sum up, the method in this paper is less conservative and easily computed.
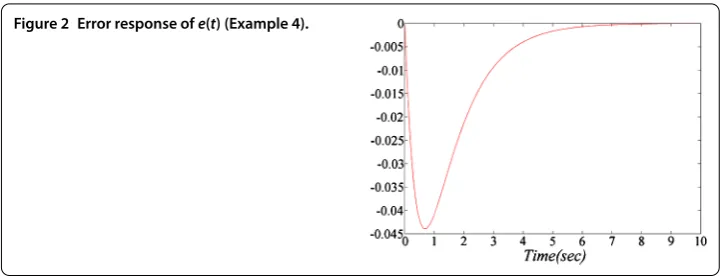
Example Consider a tunnel diode circuit shown in Figure , whose fuzzy model was done in [].x(t) =vc(t),x(t) =iL(t),ω(t) is the disturbance noise input,y(t) is the
Figure 2 Error response ofe(t) (Example 4).
Plant rulei(i= , ): IFx(t) isMi(x(t)), THEN
˙
x(t) =Aix(t) +Biω(t), y(t) =Cix(t) +Diω(t), z(t) =Lix(t),
where
A=
–. – –
, A=
–. – –
, B=B=
,
C=C= [ ], D=D= , L=L= [ ].
The fuzzy membership function is assumed as follows:
h(t) = ⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
x(t)+
, –≤x(t)≤,
, x(t) < –, –x(t)
, ≤x(t)≤,
, x(t) > ,
h(t) = –h(t).
Give theH∞ performanceγ = , the following filter parameter matrices could be ob-tained:
Af=
–. –. –. –.
, Bf=
–. –.
, Lf= [. .],
Af=
–. –. –. –.
, Bf=
. .
, Lf= [. .].
We assume the disturbanceω(t) = .e.t, using this filter, Figure plots the response
5 Conclusion
In this paper, based on the T-S fuzzy model, we have treated the delay-dependent exponen-tialH∞filter for a class of nonlinear singular systems with interval time-varying delay. In
order to obtain a less conservative result, a new filter and new LKF has been constructed. The newH∞filter guarantees the error system to be regular, impulse-free, exponentially stable and satisfies a prescribedH∞performance. Three numerical examples have
demon-strated the effectiveness and superiority of the proposed approach.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
MC carried out the main part of this paper, YM participated in the discussion and revision of the paper. All authors read and approved the final manuscript.
Acknowledgements
This work was supported by the National Natural Science Foundation of China No. 61273004 and the Natural Science Foundation of Hebei province No. F2014203085. The authors would like to thank the editor and anonymous reviewers for their many helpful comments and suggestions to improve the quality of this paper.
Received: 16 March 2015 Accepted: 17 June 2015
References
1. Chang, XH, Yang, GH: Non-fragileH∞filter design for discrete-time fuzzy systems with multiplicative gain variations. Inf. Sci.266, 171-185 (2014)
2. Zhang, XM, Han, QL: RobustH∞filtering for a class of uncertain linear systems with time-varying delay. Automatica 44(1), 157-166 (2008)
3. Ma, YC, Yan, HJ: Delay-dependent robustH∞filter for T-S fuzzy time-delay systems with exponential stability. Adv. Differ. Equ.2013, 362 (2013)
4. Wang, GL, Zhang, QL, Yang, CY: Exponential filtering for time-varying delay systems: Markovian approach. Signal Process.91(8), 1852-1862 (2011)
5. Zhao, F, Zhang, QL, Yan, XG, Cai, M:H∞Filtering for stochastic singular fuzzy systems with time-varying delay. Nonlinear Dyn.79, 215-228 (2015)
6. Wang, GL, Bo, HY, Zhang, QL:H∞Filtering for time-delayed singular Markovian jump systems with time-varying switching: aquantized method. Signal Process.109, 14-24 (2015)
7. Wang, GL, Zhang, QL, Yang, CY: ExponentialH∞filtering for singular systems with Markovian jump parameters. Int. J. Robust Nonlinear Control27(3), 792-806 (2013)
8. Ding, YC, Liu, H, Cheng, J:H∞Filtering for a class of discrete-time singular Markovian jump systems with time-varying delays. ISA Trans.53(4), 1054-1060 (2014)
9. Zhang, D, Yu, L, Wang, QG, Ong, CJ, Wu, ZG: ExponentialH∞filtering for discrete-time switched singular systems with time-varying delays. J. Franklin Inst.349(7), 2323-2342 (2012)
10. Ma, YC, Yan, HJ: Delay-dependent non-fragile robust dissipative filtering for uncertain nonlinear stochastic singular time-delay systems with Markovian jump parameters. Adv. Differ. Equ.2013, 135 (2013)
11. Wu, ZG, Park, JH, Su, HY, Chu, J: Reliable passive control for singular systems with time-varying delays. J. Process Control23(8), 1217-1228 (2013)
12. Zhang, Z, Zhang, ZX, Zhang, H: Finite-time stability analysis and stabilization for uncertain continuous-time system with time-varying delay. J. Franklin Inst.352(3), 1296-1317 (2015)
13. Ma, YC, Chen, MH, Zhang, QL: Memory dissipative control for singular T-S fuzzy time-varying delay systems under actuator saturation. J. Franklin Inst. (2015). doi:10.1016/j.jfranklin.2015.05.030
14. Peng, T, Han, CS, Xiong, YY, Wu, LG, Pang, BG: Filter design for discrete-time singularly perturbed T-S fuzzy systems. J. Franklin Inst.350(10), 3011-3028 (2013)
15. Zhu, XD, Xia, YQ:H∞Descriptor fault detection filter design for T-S fuzzy discrete-time systems. J. Franklin Inst. 351(12), 5358-5375 (2014)
16. Zhao, Y, Gao, HG, Lam, J: New results onH∞filtering for fuzzy systems with interval time-varying delays. Inf. Sci.181, 2356-2369 (2011)
17. Lin, C, Wang, QG, Lee, TH, Chen, B:H∞Filter design for nonlinear systems with time-delay through T-S fuzzy model approach. IEEE Trans. Fuzzy Syst.16(3), 739-746 (2008)
18. Chen, CL, Liu, HX, Guan, XP:H∞Filtering of time-delay T-S fuzzy systems based on piecewise Lyapunov-Krasovskii functional. Signal Process.89(10), 1998-2005 (2009)
19. Zhang, JH, Xiao, YQ, Tao, R: New results onH∞filtering for fuzzy time-delay systems. IEEE Trans. Fuzzy Syst.17(1), 128-137 (2009)
20. Huang, SJ, He, XQ, Zhang, NN: New results onH∞filter design for nonlinear systems with time delay via T-s fuzzy models. IEEE Trans. Fuzzy Syst.19(1), 193-199 (2011)
21. Su, YK, Chen, B, Lin, C, Zhang, HG: A new fuzzyH∞filter design for nonlinear continuous-time dynamic systems with time-varying delays. Fuzzy Sets Syst.160, 3539-3549 (2009)