2016 International Conference on Computer, Mechatronics and Electronic Engineering (CMEE 2016) ISBN: 978-1-60595-406-6
Vehicle-logo Recognition Based on Convolutional
Neural Network with Multi-scale Parallel Layers
Su-wen ZHANG
1, Yong-hui ZHANG
1, Jie YANG
2and Song-bin LI
2,*1College of Information Science & Technology, Hainan University, Haikou, 570228, China
2Haikou Laboratory, Institute of Acoustics, Chinese Academy of Sciences, Haikou 570105, China
*Corresponding author
Keywords: Deep learning, Convolutional Neural Network (CNN), Multi-scale parallel, Vehicle-logo recognition.
Abstract. For most of the vehicle logo recognition algorithms, the logo is difficult to be pinpointed, and the recognition is roughly to be done in bad environment. Even though the recognition accuracy of convolution neural network (CNN) is relatively high, it also needs a large number of samples. This paper proposes a multi-scale parallel convolution neural network (multi-scale parallel CNN) to recognize vehicle-logo and improves the existing vehicle detection method. The multi-scale convolution kernel is used to extract features from original data in a parallel way. This method can keep high accuracy in the condition of illumination change and noise pollution, and can adapt to the harsh environment. Experimental results show that the classification accuracy of the method is as high as 98.80% on our owe dataset and 99.80% on the dataset used in other paper, which demonstrates strong generalization ability of our proposed algorithm.
Introduction
Nowadays with the urban management getting more and more intelligent, the application of Intelligent Transportation Systems (ITS) in the urban traffic monitoring and highway management is more and more common. Such intelligent system can catch the information of vehicles and track the vehicles according to the video surveillance. Automatic logo recognition is one of the key elements of vehicle information collection in an Intelligent Transportation System (ITS).
The existing research on vehicle-logo recognition is abundant. All in all, most of the existing research methods can be divided into two steps: Logo detection and Logo classification [1-9].
not need to select feature manually. Even though the recognition accuracy of convolution neural network (CNN) is relatively high, it also needs a large number of samples.
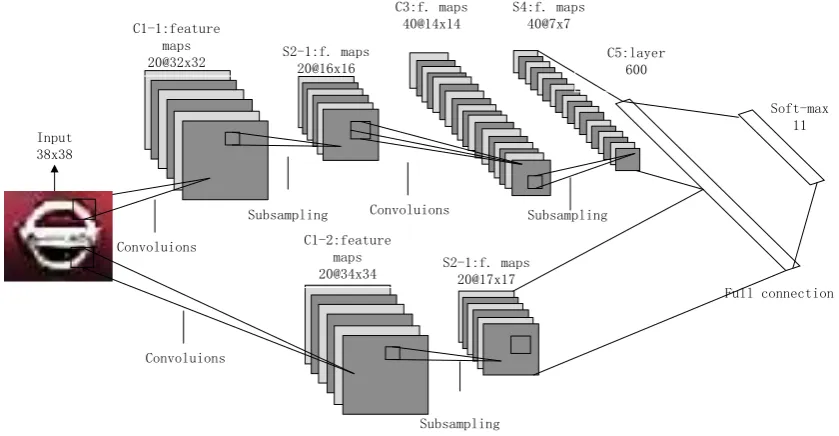
This paper proposes a multi-scale parallel convolution neural network (multi-scale parallel CNN) to recognize vehicle-logo and improves the existing vehicle detection method. The multi-scale convolution kernel is used to extract the features from the original data in a parallel way. The first layer of convolution neural network is divided into two groups, which are applied to the input data. The two groups have different convolution kernel parameters. One of groups in the first layer is connected with the second layer convolution network, the other one and the second layer network are converged on the full connection layer. This network structure makes the information obtained from the input data more fully and overcomes the problem of insufficient number of samples. It can keep high accuracy in the condition of illumination change and noise pollution, and can adapt to the harsh environment. The classification accuracy of the method is as high as 98.80% on our data set, the accuracy rate on the data set used in other papers is 99.80%, which shows a strong generalization ability of the method.
Vehicle-logo Classification
Vehicle Classification Based on Multi-scale Parallel CNN
The key to effective deep learning algorithms is the large-scale data. Because each neural network has a large number of parameters, a small amount of data cannot be sufficient training parameters. For a small number of samples, it is difficult to achieve high accuracy and converge slowly.
In the case of a small amount of training data, the method of extracting the feature using local sensing will not make full use of the data. A branch is added to the traditional single-link serial network structure. The parameters of convolution kernels are different from the original branch. Then the feature extracted from this branch is merged with the high-level feature extracted by the original branch at the full-join layer. Top-level extraction features and bottom-level features can be combined, by which way the local and global features can be learned at the same time.
Subsampling Input
38x38
Convoluions
C3:f. maps 40@14x14
S4:f. maps 40@7x7
Full connection Convoluions Subsampling
C1-1:feature maps
20@32x32 S2-1:f. maps20@16x16 C5:layer600
Soft-max 11
Subsampling
Convoluions C1-2:feature maps
[image:2.595.81.501.460.678.2]20@34x34 S2-1:f. maps20@17x17
Figure 1. The architecture of Multi-scale parallel CNN.
problem of gradient disappearance [15]. It is easier to get accurate classification results by using this network structure to train the classifier. This CNN structure is similar to the model parallel structure in image net [14], but the difference between them is that the parameters of the parallel two groups are not cut-apart, they are different and cannot be synthesized. There are some correlations between the parameters of the two parallel networks. The brunch with many layers focuses on extracting the global features, while the brunch with few layers are focused on extracting the local features.
Experiments and Results Analysis
Vehicle-logo Sample Selection and Model Training
In this paper, the study of the vehicle-logo identification involves in the top ten common brands: Volkswagen, Toyota, Mazda, Wuling, Citroen, Nissan, Audi, Mercedes-Benz, Honda, Buick. All the samples used for model training and testing come from the real traffic monitoring video. Different levels of noises are added to the original samples to produce some new samples. In addition, reducing the contrast of the image is another way to make new samples. Those options do not only expand the number of samples, but also make the model more adaptable to harsh environments. In addition to the above vehicle samples, non-vehicle-logo samples were added as the eleventh training samples.
The samples were grayed and normalized to 38 * 38 before training the model, and then input to the Multi-scale parallel CNN for training. The training samples consisted of 2500 samples per class, and the test samples were 600 samples per class.
In order to verify the generalization ability of Multi-scale parallel CNN, the network structure was applied to the dataset used in the reference [8]. The datasets in the reference were normalized after gray-scale normalization in the same way, and then were sent to Multi-scale parallel CNN for training. Each training sample was 1000, and the test sample was 150 for each class.
Classification Results and Analysis
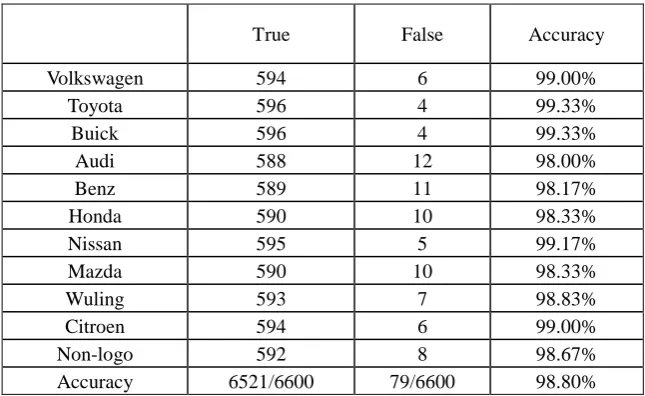
[image:3.595.136.459.533.731.2]According to the above vehicle-logo detection method, the vehicle-logo in the picture from video for monitoring was positioned, and the positioning result was saved and classified. The test dataset was tested by using Multi-scale parallel CNN training model. The test dataset consists of 11 samples. Each category has 600, the total number is 6600 . The results are shown in Table 1:
Table 1. Classification input and output results on our samples.
True False Accuracy
Volkswagen 594 6 99.00%
Toyota 596 4 99.33%
Buick 596 4 99.33%
Audi 588 12 98.00%
Benz 589 11 98.17%
Honda 590 10 98.33%
Nissan 595 5 99.17%
Mazda 590 10 98.33%
Wuling 593 7 98.83%
Citroen 594 6 99.00%
Non-logo 592 8 98.67%
Accuracy 6521/6600 79/6600 98.80%
of samples of the vehicle-logo are misjudged, but the probability is small, within the acceptable range. The results are satisfactory.
[image:4.595.73.510.168.378.2]In order to validate the generalization ability of Multi-scale parallel CNN, we apply it to the dataset used in Ref. [8], and compare the results with the results obtained in Ref. [8]. The experimental data are in Table 2:
Table 2. Results in Ref. [8] and results of our method used on samples in Ref. [8]
(a) (b)
In the table, (a) is the result in Ref. [8], and (b) is the result of the classification method in this paper. By comparing the results of the two methods, we can see that the average accuracy of method in this paper is higher; In terms of the number of errors, the maximum error of one type is one in the method of this paper, but the result in Ref. [8] has at last 8 errors in one type. In general, the method in this paper is more accurate than the method in Ref. [8], and it also reflects that Multi-scale parallel CNN has strong generalization ability, which can solve the problem of insufficient training data. The method has strong generalization ability, and can get higher accuracy in other datasets with better images. The problem that CNN needs a lot of data is overcame by extend the dataset and using the double-scale parallel CNN training mode.
Summary
In this paper, the existing method of vehicle-logo location is optimized to make the location method simple and reliable, and the error-locating image is added as an input class to the classification sample to reduce the propagation error. A multi-scale parallel convolutional neural network (multi-scale parallel CNN) method is proposed in this paper. Multi-scale convolution kernels are used to extract features from the original data. Multi-networks parallel and eventually converge to the fully connected layer, which makes full use of the information provided by the original data for vehicle-logo classification. Experimental results show that this method has a high accuracy rate of 98.8% on our dataset and 99.80% on the dataset used in other paper under the condition of weak illumination, complicated noise and fuzzy picture, which mainly contributes as follows:
1) It can adapt to harsh environments and remove the wrong vehicle-logo positioning automatically.
2) It can get higher recognition accuracy on other datasets and has strong generalization ability, which solves the problem that the CNN network’s accuracy, the quantity and quality of samples are not high enough.
Acknowledgement
This research was financially supported by the National Natural Science Foundation of China
Manufacturer True False Accuracy
Honda 150 0 100.00%
Peugeot 150 0 100.00%
Buick 142 8 94.67%
VW 150 0 100.00%
Toyota 150 0 100.00%
Lexus 150 0 100.00%
Mazda 148 2 98.67%
Chery 150 0 100.00%
Hyundai 147 3 98.00%
Citroen 149 1 99.33%
Average 1486/1500 14/1500 99.07%
Manufacturer True False Accuracy
Honda 150 0 100.00%
Peugeot 150 0 100.00%
Buick 150 0 100.00%
VW 150 0 100.00%
Toyota 149 1 99.33%
Lexus 149 1 99.33%
Mazda 150 0 100.00%
Chery 149 1 99.33%
Hyundai 150 0 100.00%
Citroen 150 0 100.00%
(Grant No. 61303249), the Application Technology Research and Development and Demonstration of Hainan Province (Grant No. ZDXM2015104).
References
[1] Yang W, Yang G, Zheng X, et al, An improved vehicle-logo localization algorithm based on texture analysis, C. Computer Science and Information Processing (CSIP), 2012 International Conference on. IEEE, (2012) 648-651.
[2] Liu Y, Li S, A vehicle-logo location approach based on edge detection and projection, C. Vehicular Electronics and Safety (ICVES), 2011 IEEE International Conference on. IEEE, (2011) 165-168.
[3] Talab A M A. Patch-based vehicle logo detection with patch intensity and weight matrix, J. Journal of Central South University, 22(2015) 4679-4686.
[4] Sam K T, Tian X L, Vehicle logo recognition using modest adaboost and radial tchebichef moments, C. International Conference on Machine Learning and Computing (ICMLC 2012). 2012.
[5] Llorca D F, Arroyo R, Sotelo M A. Vehicle logo recognition in traffic images using HOG features and SVM, C.16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE, (2013)2229-2234.
[6] Psyllos A P, Anagnostopoulos C N E, Kayafas E. Vehicle logo recognition using a sift-based enhanced matching scheme, J. IEEE transactions on intelligent transportation systems, 11(2010) 322-328.
[7] Peng H, Wang X, Wang H, et al. Recognition of Low-Resolution Logos in Vehicle Images Based on Statistical Random Sparse Distribution, J. IEEE Transactions on Intelligent Transportation Systems, 16(2015) 681-691.
[8] Huang Y, Wu R, Sun Y, et al. Vehicle Logo Recognition System Based on Convolutional Neural Networks With a Pretraining Strategy, J. IEEE Transactions on Intelligent Transportation Systems, 16(2015)1951-1960.
[9] Thubsaeng W, Kawewong A, Patanukhom K. Vehicle logo detection using convolutional neural network and pyramid of histogram of oriented gradients, C. Computer Science and Software Engineering (JCSSE), 2014 11th International Joint Conference on. IEEE, (2014)34-39.
[10] Määttä J, Hadid A, Pietikäinen M, Face spoofing detection from single images using micro-texture analysis, C. Biometrics (IJCB), 2011 international joint conference on. IEEE, (2011) 1-7.
[11] LeCun, Yann, LeNet-5, convolutional neural networks, Information on http://yann.lecun. com/exdb/lenet (2015).
[12] Bouvrie J, Notes on convolutional neural networks. (2006).
[13] Zeiler M D, Fergus R, Visualizing and understanding convolutional networks, C.European Conference on Computer Vision. Springer International Publishing, (2014)818-833.
[14] Krizhevsky A, Sutskever I, Hinton G E, Imagenet classification with deep convolutional neural networks, C. Advances in neural information processing systems. (2012)1097-1105.
[15] Sun Y, Wang X, Tang X. Deep learning face representation from predicting 10,000 classes, C. Computer Vision and Pattern Recognition (CVPR), 2014 IEEE Conference on. IEEE, (2014)1891-1898.
![Table 2. Results in Ref. [8] and results of our method used on samples in Ref. [8]](https://thumb-us.123doks.com/thumbv2/123dok_us/300122.1031213/4.595.73.510.168.378/table-results-ref-results-method-used-samples-ref.webp)
