http://wrap.warwick.ac.uk/
Original citation:
Dobson, M., Luskin, M. and Ortner, Christoph. (2011) Iterative methods for the
force-based quasicontinuum approximation : analysis of a 1D model problem. Computer
Methods in Applied Mechanics and Engineering, Volume 200 (Number 37-40). pp.
2697-2709. ISSN 0045-7825
Permanent WRAP url:
http://wrap.warwick.ac.uk/43918
Copyright and reuse:
The Warwick Research Archive Portal (WRAP) makes this work of researchers of the
University of Warwick available open access under the following conditions. Copyright ©
and all moral rights to the version of the paper presented here belong to the individual
author(s) and/or other copyright owners. To the extent reasonable and practicable the
material made available in WRAP has been checked for eligibility before being made
available.
Copies of full items can be used for personal research or study, educational, or
not-for-profit purposes without prior permission or charge. Provided that the authors, title and
full bibliographic details are credited, a hyperlink and/or URL is given for the original
metadata page and the content is not changed in any way.
Publisher’s statement:
NOTICE: this is the author’s version of a work that was accepted for publication in
Computer Methods in Applied Mechanics and Engineering. Changes resulting from the
publishing process, such as peer review, editing, corrections, structural formatting, and
other quality control mechanisms may not be reflected in this document. Changes may
have been made to this work since it was submitted for publication. A definitive version
was subsequently published in Methods in Applied Mechanics and Engineering, (2011)
Volume 200 (Number 37-40). pp. 2697-2709.
http://dx.doi.org/10.1016/j.cma.2010.07.008
note on versions:
The version presented here may differ from the published version or, version of record, if
you wish to cite this item you are advised to consult the publisher’s version. Please see
the ‘permanent WRAP url’ above for details on accessing the published version and note
that access may require a subscription.
Force-based Quasicontinuum Approximation
Matthew Dobson, Mitchell Luskin, and Christoph Ortner
Abstract Force-based multiphysics coupling methods have become popular since they provide a simple and efficient coupling mechanism, avoiding the difficulties in formulating and and implementing a consistent coupling energy. They are also the only known pointwise consistent methods for coupling a general atomistic model to a finite element continuum model. However, the development of efficient and reli-able iterative solution methods for the force-based approximation presents a chal-lenge due to the non-symmetric and indefinite structure of the linearized force-based quasicontinuum approximation, as well as to its unusual stability properties. In this paper, we present rigorous numerical analysis and computational experiments to systematically study the stability and convergence rate for a variety of linear sta-tionary iterative methods.
1 Introduction
Low energy local minima of crystalline atomistic systems are characterized by highly localized defects such as vacancies, interstitials, dislocations, cracks, and grain boundaries separated by large regions where the atoms are slightly deformed from a lattice structure. The goal of atomistic-to-continuum coupling methods [1–4, 15, 16, 22, 26, 28, 32] is to approximate a fully atomistic model by maintaining the accuracy of the atomistic model in small neighbors surrounding the localized
Matthew Dobson
ERMICS - ENPC, 6 et 8 avenue Blaise Pascal, Cit´e Descartes - Champs sur Marne, 77455 Marne la Vall´ee Cedex 2, France e-mail: [email protected]
Mitchell Luskin
School of Mathematics, 206 Church St. SE, University of Minnesota, Minneapolis, MN 55455, USA, e-mail: [email protected]
Christoph Ortner
Mathematical Institute, St. Giles’ 24–29, Oxford OX1 3LB, UK, e-mail: [email protected]
defects and using the efficiency of continuum coarse-grained models in the vast regions that are only mildly deformed from a lattice structure.
Force-based atomistic-to-continuum methods decompose a computational ref-erence lattice into anatomistic regionA and acontinuum regionC, and assigns forces to representative atoms according to the region they are located in. In the quasicontinuum method, the representative atoms are all atoms in the atomistic re-gion and the nodes of a finite element approximation in the continuum rere-gion. The force-based approximation is thus given by [5, 6, 9, 10, 12, 32]
Fqcf j (y):=
(
Fa
j(y) if j∈A,
Fc
j(y) if j∈C,
whereydenotes the positions of the representative atoms which are indexed by j,
Fa
j(y)denotes the atomistic force at representative atom j,andFcj(y)denotes a
continuum force at representative atom j.
The force-based quasicontinuum method (QCF) uses a Cauchy-Born strain en-ergy density for the continuum model to achieve a patch test consistent approx-imation [6, 10, 24]. We recall that a patch test consistent atomistic-to-continuum approximation exactly reproduces the zero net forces of uniformly strained lat-tices [19, 24, 27]. However, the recently discovered unusual stability properties of the linearized force-based quasicontinuum (QCF) approximation, especially its in-definiteness, present a challenge to the development of efficient and reliable iterative methods [12]. Energy-based quasicontinuum approximations have many attractive features such as more reliable solution methods, but practical patch test consistent, energy-based quasicontinuum approximations have yet to be developed for most problems of physical interest, such as three-dimensional problems with many-body interaction potentials [20, 21, 30].
Rather than attempt an analysis of linear stationary methods for the full nonlinear system, in this paper we restrict our focus to the linearization of a one-dimensional model problem about the uniform deformationyF and consider linear stationary methods of the form
P u(n+1)−u(n)=αr(n), (1)
wherePis a nonsingular preconditioning operator, the damping parameterα>0 is
fixed throughout the iteration (that is, stationary), and the residual is defined as
r(n):=f−LqcfF u(n).
We will see below that our analysis of this simple model problem already allows us to observe many interesting and crucial features of the various methods. For example, we can distinguish which iterative methods converge up to the critical strainF∗(see (8) for a discussion of the critical strain), and we obtain first results on their convergence rates.
straight-forward generalizations of results from [9–11, 13]. In Section 4, we review the basic properties of linear stationary iterative methods.
In Section 5, we give an analysis of the Richardson Iteration (P=I) and prove a contraction rate of order 1−O(N−2)in the`εpnorm (discrete Sobolev norms are
defined in Section 2.1), whereNis the size of the atomistic system.
In Section 6, we consider the iterative solution with preconditioner P=LqclF ,
whereLqclF is a standard second order elliptic operator, and show that the precon-ditioned iteration with an appropriately chosen damping parameterα is a
contrac-tion up to the critical strainF∗only inU2,∞among the common discrete Sobolev
spaces. We show, however, that a rate of contraction inU2,∞independent ofNcan
be achieved with the elliptic preconditionerLqclF and an appropriate choice of the damping parameterα.
In Section 7, we consider the popular ghost force correction iteration (GFC) which is given by the preconditionerP=LqceF ,and we show that the GFC itera-tion ceases to be a contracitera-tion for any norm at strains less than the critical strain. This result and others presented in Section 7 imply that the GFC iteration might not always reliably reproduce the stability of the atomistic system [11]. We did not find that the GFC method predicted an instability at a reduced strain in our benchmark test [18] (see also [24]). To explain this, we note that our 1D analysis in this paper can be considered a good model for cleavage fracture, but not for the slip instabili-ties studied in [18,24]. We are currently attempting to develop a 2D benchmark test for cleavage fracture to study the stability of the GFC method.
2 The QC Approximations and Their Stability
We give a review of the prototype QC approximations and their stability properties in this section. The reader can find more details in [9, 11].
2.1 Function Spaces and Norms
We consider a one-dimensional atomistic chain whose 2N+1 atoms have the ref-erence positionsxj= jε for ε=1/N.The displacement of the boundary atoms
will be constrained, so the space of admissible displacements will be given by the displacement space
U =
u∈R2N+1:u−N =uN=0 .
We will use various norms on the spaceU which are discrete variants of the usual Sobolev norms that arise naturally in the analysis of elliptic PDEs.
kvk`p
ε :=
ε∑N`=−N+1|v`|p 1/p
, 1≤p<∞,
max`=−N+1,...,N|v`|, p=∞,
and we denote byU0,pthe spaceU equipped with the`εpnorm. The inner product
associated with the`2 εnorm is
hv,wi:=ε
N
∑
`=−N+1
v`w` forv,w∈U.
We will also usekfk`p
ε andhf,gito denote the` p
ε-norm and`2ε-inner product for
arbitrary vectors f,gwhich need not belong toU. In particular, we further define theU1,pnorm
kvkU1,p:=kv0k`p
ε,
where(v0)`=v`0 =ε−1(v`−v`−1),`=−N+1, . . . ,N, and we letU1,pdenote the
spaceU equipped with theU1,pnorm. Similarly, we define the space U2,pand its associatedU2,pnorm, based on the centered second differencev00`=ε−2(v`+1−
2v`+v`−1)for`=−N+1, . . . ,N−1.
We have thatv0∈R2N forv∈U has mean zero∑Nj=−N+1v0j=0.We can thus
obtain from [9, Equation 9] that
max
v∈U
kv0k`q
ε=1
hu0,v0i ≤ max
σ∈R2N kσk`q
ε
=1
hu0,σi=kukU1,p ≤2 max
v∈U
kv0k`q
ε=1
hu0,v0i. (2)
We denote the space of linear functionals onU byU∗.Forg∈U∗,s=0,1,
and 1≤p≤∞, we define the negative normskgkU−s,p by
kgkU−s,p:= sup
v∈U
kvkUs,q=1
hg,vi,
where 1≤q≤∞ satisfies 1p+1q =1. We let U−s,p denote the dual space U∗
equipped with theU−s,pnorm.
For a linear mappingA:U1→U2whereUiare vector spaces equipped with the
normsk · kUi,we denote the operator norm ofAby
kAkL(U1,U2):= sup
v∈U,v6=0
kAvkU2 kvkU1 .
IfU1=U2, then we use the more concise notation
kAkU1:=kAkL(U1,U1).
IfA:U0,2→U0,2is invertible, then we can define thecondition numberby
WhenAis symmetric and positive definite, we have that
cond(A) =λ2NA−1/λ1A
where the eigenvalues ofAare 0<λ1A≤ ··· ≤λ2NA−1.If a linear mappingA:U →
U is symmetric and positive definite, then we define theA-inner product and A-norm by
hv,wiA:=hAv,wi, kvk2A=hAv,vi.
The operatorA:U1→U2isoperator stableif the operator normkA−1kL(U2,U1) is finite, and a sequence of operators Aj :U1,j →U2,j is operator stable if the
sequence k(Aj)−1kL(U2,j,U1,j) is uniformly bounded. A symmetric operator A:
U0,2→U0,2 is called stable if it is positive definite, and this implies operator
stability. A sequence of positive definite, symmetric operators Aj :U0,2→U0,2
is calledstableif their smallest eigenvaluesλ1Aj are uniformly bounded away from
zero.
2.2 The atomistic model
We now consider a one-dimensional atomistic chain whose 2N+3 atoms have the reference positionsxj= jε forε=1/N, and interact only with their nearest and next-nearest neighbors.
We denote the deformed positions byyj, j=−N−1, . . . ,N+1; and we
con-strain the boundary atoms and their next-nearest neighbors to match the uniformly deformed state,yFj =F jε,whereF>0 is a macroscopic strain, that is,
y−N−1=−F(N+1)ε, y−N=−FNε,
yN=FNε, yN+1=F(N+1)ε.
(3)
We introduced the two additional atoms with indices±(N+1)so thaty=yF is an equilibrium of the atomistic model. The total energy of a deformationy∈R2N+3is
now given by
Ea(y)
−
N
∑
j=−N
εfjyj,
where
Ea(y)N+1
∑
j=−N
ε φ
yj−yj−1
ε
=
N+1
∑
j=−N
ε φ(y0j) +
N+1
∑
j=−N+1
ε φ(y0j+y0j−1). (4)
Here, φ is a scaled two-body interatomic potential (for example, the normalized Lennard-Jones potential,φ(r) =r−12−2r−6), and fj, j=−N, . . . ,N,are external
unconstrained atoms,
−Fa
j(ya) =fj for j=−N+1, . . . ,N−1,
yaj=F jε for j=−N−1,−N,N,N+1,
(5)
where the atomistic force (per lattice spacingε) is given by
Fa
j(y):=−
1
ε ∂Ea(y)
∂yj
=1
ε
n
φ0(y0j+1) +φ0(y0j+2+y0j+1) −
φ0(y0j) +φ0(y0j+y0j−1)o
.
(6)
We linearize (6) by lettingu∈R2N+3,u±N=u±(N+1)=0, be a “small” displace-ment from the uniformly deformed stateyFj =F jε; that is, we define
uj=yj−yFj for j=−N−1, . . . ,N+1.
We then linearize the atomistic equilibrium equations (5) about the uniformly de-formed stateyFand obtain a linear system for the displacementua,
(LaFua)j=fj for j=−N+1, . . . ,N−1,
uaj=0 for j=−N−1,−N,N,N+1,
where(LFav)jis given by
(LaFv)j:=φF00
−vj+1+2vj−vj−1
ε2
+φ2F00
−vj+2+2vj−vj−2
ε2
.
Here and throughout we define
φF00:=φ00(F) and φ2F00 :=φ00(2F),
whereφis the interatomic potential in (4). We will always assume thatφF00>0 and φ2F00 <0,which holds for typical pair potentials such as the Lennard-Jones potential
under physically realistic deformations.
The stability properties ofLaFcan be understood by using a representation derived in [11],
hLaFu,ui=εAF N
∑
`=−N+1
|u0`|2−ε3φ2F00
N
∑
`=−N
|u00`|2=AFku0k2`2
ε−ε 2
φ2F00 ku00k2`2
ε, (7)
whereAFis thecontinuum elastic modulus
AF=φF00+4φ2F00 .
Proposition 1.Ifφ2F00 ≤0, then
min
u∈R2N+3\{0}
u±N=u±(N+1)=0
hLaFu,ui ku0k2`2
ε
=AF−ε2νεφ2F00 ,
where
νε:= min
u∈R2N+3\{0}
u±N=u±(N+1)=0
ku00k2`2
ε
ku0k2 `2
ε .
satisfies0<νε≤C for some universal constant C.
2.2.1 The critical strainF∗
The previous result shows thatLaF is positive definite, uniformly asN→∞, if and only ifAF>0. For realistic interaction potentials,LaFis positive definite in a ground
stateF0>0. For simplicity, we assume thatF0=1, and we ask how far the system
can be “stretched” by applying increasing macroscopic strainsF until it loses its stability. In the limit asN→∞, this happens at thecritical strain F∗, which is the smallest number larger thanF0, solving the equation
AF∗=φ00(F∗) +4φ00(2F∗) =0. (8)
2.3 The local QC approximation (QCL)
The local quasicontinuum (QCL) approximation uses the Cauchy-Born approxima-tion to approximate the nonlocal atomistic model by a local continuum model [5,23, 26]. For next-nearest neighbor interactions, the Cauchy-Born approximation reads
φ ε−1(y`+1−y`−1)
≈1
2
φ(2y0`) +φ(2y0`+1)],
and results in the QCL energy, fory∈R2N+3satisfying the boundary conditions (3),
Eqcl(y) = N
∑
j=−N+1
εφ(y0j) +φ(2y0j)
+ε
φ(y0−N) +1
2φ(2y
0
−N) +φ(y0N+1) +
1 2φ(2y
0
N+1)
.
(9)
−Fqcl j (y
qcl) =f
j for j=−N+1, . . . ,N−1,
yqclj =F jε for j=−N,N,
where
Fqcl
j (y):=−
1
ε
∂Eqcl(y)
∂yj
=1
ε
n
φ0(y0j+1) +2φ0(2y0j+1) −
φ0(y0j) +2φ0(2y0j)o
.
(10)
We see from (10) that the QCL equilibrium equations are well-defined with only a single constraint at each boundary, and we can restrict our consideration to y∈R2N+1withy−N=−FandyN=Fas the boundary conditions.
Linearizing the QCL equilibrium equations (10) aboutyFresults in the system
(LFqcluqcl)j= fj for j=−N+1, . . . ,N−1,
uqclj =0 for j=−N,N,
where
LqclF =AFL
andLis the discrete Laplacian, forv∈U, given by
(Lv)j:=−v00j=
−vj+1+2vj−vj−1
ε2
, j=−N+1, . . . ,N−1. (11)
The QCL operator is a scaled discrete Laplace operator, so
hLqclF u,ui=AFku0k2`2
ε
for allu∈U.
In particular, it follows thatLqclF is stable if and only ifAF>0, that is, if and only if
F<F∗,whereF∗is the critical strain defined in (8).
2.4 The force-based QC approximation (QCF)
The force-based quasicontinuum (QCF) method combines the accuracy of the atom-istic model with the efficiency of the QCL approximation by decomposing the com-putational reference lattice into anatomistic regionA and acontinuum regionC, and assigns forces to atoms according to the region they are located in. The QCF operator is given by [5, 6]
Fqcf j (y):=
(
Fa
j(y) if j∈A,
Fqcl
j (y) if j∈C,
and the QCF equilibrium equations are given by
−Fjqcf(y qcf) =f
j for j=−N+1, . . . ,N−1,
yqcfj =F jε for j=−N,N.
We note that, since atoms near the boundary belong toC, only one boundary con-dition is required at each end.
For simplicity, we specify the atomistic and continuum regions as follows. We fixK∈N, 1≤K≤N−2, and define
A ={−K, . . . ,K} and C ={−N+1, . . . ,N−1} \A.
Linearizing (12) aboutyF, we obtain
(LqcfF uqcf)j=fj for j=−N+1, . . . ,N−1,
uqcfj =0 for j=−N,N, (13)
where the linearized force-based operator is given explicitly by
(LqcfF v)j:=
(LqclF v)j, for j∈C,
(LaFv)j, for j∈A.
The stability analysis of the QCF operatorLqcfF is less straightforward [9, 10]; we will therefore treat it separately and postpone it to Section 3.
2.5 The original energy-based QC approximation (QCE)
The original energy-based quasicontinuum (QCE) method [26] defines an energy functional by assigning atomistic energy contributions in the atomistic region and continuum energy contributions in the continuum region. For our model problem, we obtain
Eqce(y) =
ε
∑
`∈AE
a
`(y) +ε
∑
`∈CEc
`(y) fory∈R2N+1,
where
Ec
`(y) = 12 φ(2y0`) +φ(y0`) +φ(y0`+1) +φ(2y0`+1)
, and
Ea
`(y) = 12 φ(y0`−1+y0`) +φ(y0`) +φ(y0`+1) +φ(y0`+1+y0`+2)
.
(LqceF uqce)j−gFj =fj for j=−N+1, . . . ,N−1,
uqcej =0 for j=−N,N, (14)
where, for 0≤j≤N−1,we have
(LqceF v)j=φF00−
vj+1+2vj−vj−1
ε2
+φ2F00
4−vj+2+2vj−vj−2
4ε2 , 0≤j≤K−2,
4−vj+2+2vj−vj−2 4ε2 +
1
ε
vj+2−vj
2ε , j=K−1,
4−vj+2+2vj−vj−2 4ε2 −
2
ε
vj+1−vj
ε +
1
ε
vj+2−vj
2ε , j=K,
4−vj+1+2vj−vj−1
ε2 −
2
ε
vj−vj−1
ε +
1
ε
vj−vj−2
2ε , j=K+1,
4−vj+1+2vj−vj−1
ε2 +
1
ε
vj−vj−2
2ε , j=K+2,
4−vj+1+2vj−vj−1
ε2 , K+3≤j≤N−1,
and where the vector of “ghost forces,”g, is defined by
gFj =
0, 0≤ j≤K−2,
−1
2εφ2F0 , j=K−1, 1
2εφ2F0 , j=K, 1
2εφ2F0 , j=K+1,
−1
2εφ2F0 , j=K+2,
0, K+3≤j≤N−1.
The equations for j=−N+1, . . . ,−1 follow from symmetry.
The following result is a new sharp stability estimate for the QCE operatorLqceF . Its somewhat technical proof is given in Appendix 8.1.
Theorem 1.If K≥1, N≥K+2, andφ2F00 ≤0, then
inf
u∈U
ku0k`2
ε
=1
hLqceF u,ui=AF+λKφ2F00 ,
where 12≤λK≤1. Asymptotically, as K→∞, we have
2.6 The quasi-nonlocal QC approximation (QNL)
The QCF method is the simplest idea to circumvent the interface inconsistency of the QCE method, but gives non-conservative equilibrium equations [5]. An alterna-tive energy-based approach was suggested in [14, 33], which is based on a modi-fication of the energy at the interface. The quasi-nonlocal approximation (QNL) is given by the energy functional
Eqnl(y):=
ε
N
∑
`=−N+1
φ(y0`) +ε
∑
`∈A
φ(y0`+y0`+1) +ε
∑
`∈C
1 2
φ(2y0`) +φ(2y0`+1)
,
where we setφ(y0−N) =φ(y0N+1) =0. The QNL approximation is patch test consis-tent; that is,y=yFis an equilibrium of the QNL energy functional.
The linearization of the QNL equilibrium equations aboutyFis
(LqnlF uqnl)j=fj for j=−N+1, . . . ,N−1,
uqnlj =0 for j=−N,N,
where
(LqnlF v)j=φF00−
vj+1+2vj−vj−1
ε2
+φ2F00
4−vj+2+2vj−vj−2
4ε2 , 0≤j≤K−1,
4−vj+2+2vj−vj−2 4ε2 −
−vj+2+2vj+1−vj
ε2 , j=K,
4−vj+1+2vj−vj−1
ε2 +
−vj+2vj−1−vj−2
ε2 , j=K+1,
4−vj+1+2vj−vj−1
ε2 , K+2≤j≤N−1.
(15)
We can repeat our stability analysis for the periodic QNL operator in [11, Sec. 3.3] verbatim to obtain the following result.
Proposition 2.If K<N−1, andφ2F≤0, then
inf
u∈U
ku0k`2
ε
=1
hLqnlF u,ui=AF.
Remark 1.Sinceφ2F00 = (AF−φF00)/4,the linearized operators(φF00)−1LaF,(φF00)−1L qcl F ,
3 Stability and Spectrum of the QCF operator
In this section, we give various properties of the linearized QCF operator, most of which are variants of our results in [9, 10]. We first give a result for the non-coercivity of the QCF operator which lies at the heart of many of the difficulties one encounters in analyzing the QCF method.
Theorem 2 (Theorem 1, [10]).IfφF00>0 andφ2F00 ∈R\ {0}then, for sufficiently
large N,the operator LqcfF isnotpositive-definite. More precisely, there exist N0∈N
and C1≥C2>0such that, for all N≥N0and2≤K≤N/2,
−C1N1/2≤ inf v∈U
kv0k`2
ε
=1
LqcfF v,v≤ −C2N1/2.
The proof of Theorem 2 yields also the following asymptotic result on the oper-ator norm ofLqcfF . Its proof is a straightforward extension of [10, Lemma 2], which covers the casep=2, and we therefore omit it.
Lemma 1.Letφ2F00 6=0, then there exists a constant C3>0such that for sufficiently
large N, and for2≤K≤N/2,
C−31N1/p≤LqcfF
L(U1,p,U−1,p)≤C3N1/p.
As a consequence of Theorem 2 and Lemma 1, we analyzed the stability ofLqcfF in alternative norms. By following the proof of [9, Theorem 3] verbatim (see also [9, Remark 3]), we can obtain the following sharp stability result.
Proposition 3.If AF>0andφ2F00 ≤0, then L qcf
F is invertible with
(LqcfF )−1
L(U0,∞,U2,∞)≤1/AF.
If AF=0,then LqcfF is singular.
This result shows thatLqcfF is operator stable up to the critical strainF∗at which the atomistic model loses its stability as well (cf. Section 2.2).
3.1 Spectral properties of
L
qcfFin
U
0,2=
`
2εLFqnl. We first observed this numerically in [9, Section 4.4] for the case of periodic boundary conditions. A proof has since been given in [13, Section 3], which trans-lates verbatim to the case of Dirichlet boundary conditions and yields the following result.
Lemma 2.For all N≥4, 1≤K≤N−2, we have the identity
LqcfF =L−1LqnlF L. (16)
In particular, the operator LqcfF is diagonalizable and its spectrum is identical to the spectrum of LqnlF .
We denote the eigenvalues ofLqnlF (andLqcfF ) by
0<λ1qnl≤...λ`qnl≤...≤λ2Nqnl−1.
The following lemma gives a lower bound forλ1qnl,an upper bound forλ2Nqnl−1,and
consequently an upper bound for cond(LqnlF ) =λ2Nqnl−1/λ1qnl.
Lemma 3.If K<N−1andφ2F00 ≤0, then
λ1qnl≥2AF, λ2Nqnl−1≤ AF−4φ2F00
ε−2=φF00ε−2, and
cond(LqnlF ) =λ
qnl 2N−1
λ1qnl ≤
φF00
2AF
ε−2.
For the analysis of iterative methods, we are also interested in the condition num-ber of a basis of eigenvectors ofLqcfF asN tends to infinity. Employing Lemma 2, we can writeLqcfF =L−1ΛqcfLwhereLis the discrete Laplacian operator andΛqcf
is diagonal. The columns of L−1 are poorly scaled; however, a simple rescaling
was found in [13, Thm. 3.3] for periodic boundary conditions. The construction and proof translate again verbatim to the case of Dirichlet boundary conditions and yield the following result (note, in particular, that the main technical step, [13, Lemma 4.6] can be applied directly).
Lemma 4.Let AF>0, then there exists a matrix V of eigenvectors for the
force-based QC operator LqcfF such thatcond(V)is bounded above by a constant that is independent of N.
3.2 Spectral properties of
L
qcfFin
U
1,2QCF system. The operatorL1/2can be understood as a basis transformation to an orthonormal basis inU1,2. Hence, it will be useful to study the spectral properties ofLqcfF in that space. The relevant (generalized) eigenvalue problem is
LqcfF v=λLv, v∈U, (17)
which can, equivalently, be written as
L−1LqcfF v=λv, v∈U, (18)
or as
L−1/2LqcfF L−1/2w=λw, w∈U, (19)
with the basis transformw=L1/2v, in either case reducing it to a standard eigen-value problem in`2
ε. SinceLandL
1/2commute, Lemma 2 immediately yields the
following result.
Lemma 5.For all N≥4, 1≤K≤N−2 the operator L−1LqcfF is diagonalizable and its spectrum is identical to the spectrum of L−1LqnlF .
We gave a proof in [12] of the following lemma, which completely characterizes the spectrum ofL−1LqnlF , and thereby also the spectrum ofL−1LqcfF . We denote the spectrum ofL−1LqnlF (andL−1LqcfF ) by{µqnlj : j=1, . . . ,2N−1}.
Lemma 6.Let K≤N−2and AF>0, then the (unordered) spectrum of L−1LqnlF
(that is, theU1,2-spectrum) is given by
µqnlj =
(
AF−4φ2F00 sin2 4Kjπ+4, j=1, . . . ,2K+1,
AF, j=2K+2, . . . ,2N−1.
In particular, ifφ2F00 ≤0,then
maxjµqnlj
minjµqnlj
=1−4φ
00
2F
AF
sin2(2K4K++14)π= φF00
AF
+4φ2F00
AF
sin2 π 4K+4
= φF00
AF
+O(K−2).
We conclude this study by stating a result on the condition number of the matrix of eigenvectors for the eigenvalue problem (19). Letting ˜V be an orthogonal matrix of eigenvectors of L−1/2LFqnlL−1/2and ˜Λ the corresponding diagonal matrix, then Lemma 2 yields
L−1/2LqcfF L−1/2= L−1L−1/2LqnlF L−1/2L
= (V˜TL)−1˜
Λ(V˜TL).
Lemma 7.If AF >0,then there exists a matrixW of eigenvectors for the precon-e ditioned force-based QC operator L−1/2Lqcf
F L−1/2, such thatcond(We) =O(N2)as N→∞.
4 Linear Stationary Iterative Methods
In this section, we investigate linear stationary iterative methods to solve the lin-earized QCF equations (13). These are iterations of the form
P u(n)−u(n−1)=αr(n−1), (20)
wherePis a nonsingular preconditioner, the step size parameterα>0 is constant (that is, stationary), and the residual is defined as
r(n):=f−LqcfF u(n).
The iteration error
e(n):=uqcf−u(n) satisfies the recursion
Pe(n)= P−αLqcfF e(n−1),
or equivalently,
e(n)= I−αP−1LqcfF e(n−1)=:Ge(n−1), (21)
where the operatorG=I−αP−1LqcfF :U →U is called theiteration matrix. By iterating (21), we obtain that
e(n)= I−αP−1LqcfF ne(0)=Gne(0). (22)
Before we investigate various preconditioners, we briefly review the classical theory of linear stationary iterative methods [29]. We see from (22) that the iterative method (20) converges for every initial guess u(0)∈U if and only ifGn→0 as n→∞.For a given normkvk, forv∈U,we can see from (22) that the reduction in the error afterniterations is bounded above by
kGnk= sup
e(0)∈U
ke(n)k ke(0)k.
It can be shown [29] that the convergence of the iteration for every initial guess u(0)∈U is equivalent to the conditionρ(G)<1,whereρ(G)is thespectral radius ofG,
ρ(G) =max{|λi|:λiis an eigenvalue ofG}.
lim
n→∞kG
n
k1/n=
ρ(G)
for any vector norm onU.However, ifρ(G)<1 andkGk ≥1,the Spectral
Ra-dius Theorem does not give any information about how largenmust be to obtain kGnk ≤1.On the other hand, ifρ(G)<1,then there exists a normk · ksuch that kGk<1, so thatGitself is a contraction [17]. In this case, we have the stronger contraction property that
ke(n)k ≤ kGkke(n−1)k ≤ kGknke(0)k.
In the remainder of this section, we will analyze the norm of the iteration matrix, kGk,for several preconditionersP,using appropriate norms in each case.
5 The Richardson Iteration (
P
=
I
)
The simplest example of a linear iterative method is the Richardson iteration, where P=I. If follows from Lemma 4 that there exists a similarity transformSsuch that
LqcfF =S−1ΛqnlS, (23)
where cond(S)≤C(whereCis independent ofN), andΛqnlis the diagonal matrix
ofU0,2-eigenvalues(λqnlj )2Nj=−11ofLqcfF . As an immediate consequence, we obtain the identity
Gid(α) =I−αLqcfF =S− 1 I
−αΛqnlS,
where yields
kGid(α)k`2
ε ≤cond(S)kI−αΛ qnl
k`2
ε ≤Cj=1max,...,2N−1
1−α λqnlj . (24)
IfAF>0, then it follows from Proposition 2 thatλjqnl>0 for all j, and hence that
the iteration matrixGid(α):=I−αLqcfF is a contraction in thek · k`2
ε norm if and
only if 0<α<αmaxid :=2/λ2Nqnl−1.It follows from Lemma 3 thatαmaxid ≤(2ε2)/φF00.
We can minimize the contraction constant for Gid(α) in the kvkSTS norm by
choosingα=αoptid :=2/(λ1qnl+λ2Nqnl−1),and in this case we obtain from Lemma 3
that
Gid αoptid
`2
ε ≤C
λ2Nqnl−1−λ1qnl λ2Nqnl−1+λ1qnl ≤
C
1−2AFε
2
φF00
.
It thus follows that the contraction constant forGid(α)in thek · k`2
ε norm is only
5.1 Numerical example for the Richardson Iteration
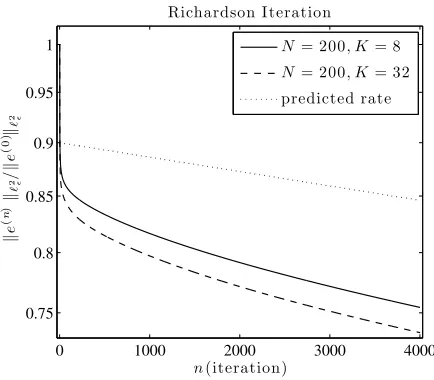
In Figure 1, we plot the error in the Richardson iteration against the iteration number. As a typical example, we use the right-hand side
f(x) =h(x)cos(3πx) where h(x) =
(
1, x≥0,
−1, x<0, (25)
which is smooth in the continuum region but has a discontinuity in the atomistic region. We choose φF00=1,AF =0.5,and the optimal α=αoptid discussed above
(we note thatGid(αoptid)depends only onAF/φF00andN,bute(0)depends onAFand
φF00 independently) . We observe initially a much faster convergence rate than the one predicted because the initial residual for (25) has a large component in the eigenspaces corresponding to the intermediate eigenvaluesλjqnlfor 1<j<2N−1.
However, after a few iterations the convergence behavior approximates the predicted rate.
0 1000 2000 3000 4000
0.75 0.8 0.85 0.9 0.95 1
Richardson Iteration
n(iteration)
k
e
(
n
)k
ℓ
2ǫ
/
k
e
(
0
)k
ℓ
2ǫ
N= 200, K= 8 N= 200, K= 32 predicted rate
Fig. 1 Normalized`2
ε-error of successive Richardson iterations for the linear QCF system with
N=200,K=8,32,φF00=1,AF=0.5,optimalα=αoptid,right-hand side (25), and starting guess
[image:18.612.193.410.325.515.2]6 Preconditioning with QCL (
P
=
L
qclF=
A
FL
)
We have seen in Section 5 that the Richardson iteration with the trivial precondi-tionerP=Iconverges slowly, and with a contraction rate of the order 1−O(ε2). The goal of a (quasi-)optimal preconditioner for large systems is to obtain a perfor-mance that is independent of the system size. We will show in the present section that the preconditionerP=AFL(the system matrix for the QCL method) has this
desirable quality.
Of course, preconditioning withP=AFLcomes at the cost of solving a large
linear system at each iteration. However, the QCL operator is a standard elliptic op-erator for which efficient solution methods exist. For example, the preconditioner P=AFLcould be replaced by a small number of multigrid iterations, which would
lead to a solver with optimal complexity. Here, we will ignore these additional com-plications and assume thatPis inverted exactly.
Throughout the present section, the iteration matrix is given by
Gqcl(α):=I−α(LqclF )− 1Lqcf
F =I−α(AFL)−1LqcfF , (26)
whereα>0 andAF=φF00+4φ2F00 >0. We will investigate whether, ifU is equipped
with a suitable topology,Gqcl(α)becomes a contraction. To demonstrate that this is
a non-trivial question, we first show that in the spacesU1,p, 1≤p<∞, which are natural choices for elliptic operators, this result does not hold.
Proposition 4.If2≤K≤N/2,φ2F00 6=0,and p∈[1,∞),then for anyα>0we have
Gqcl(α)
U1,p∼N1/p as N→∞.
Proof. We have from (2) andq=p/(p−1)the inequality
L−1LqcfF U1,p = max
u∈U
ku0k`p
ε= 1
L−1LFqcfu 0
`p
ε
≤ 2 max
u,v∈U
ku0k`p
ε
=1,kv0k`q
ε
=1
D
L−1LqcfF u0,v0 E
= 2 max
u,v∈U
ku0k`p
ε= 1,kv0k`q
ε= 1
D
L L−1LqcfF u,vE
= 2 max
u,v∈U
ku0k`p
ε
=1,kv0k`q
ε
=1
LqcfF u,v
= 2LqcfF L(U1,p,U−1,p)
as well as the reverse inequality
LqcfF L(U1,p,U−1,p)≤
The result now follows from the definition ofGqcl(α)in (26), Lemma 1, and the
fact thatα>0 andAF>0.
We will return to an analysis of the QCL preconditioner in the spaceU1,2 in Section 6.3, but will first attempt to prove convergence results in alternative norms.
6.1 Analysis of the QCL preconditioner in
U
2,∞We have found in our previous analyses of the QCF method [9, 10] that it has su-perior properties in the function spacesU1,∞ andU2,∞. Hence, we will now
in-vestigate whetherα can be chosen such thatGqcl(α)is a contraction, uniformly as
N→∞. In [9], we have found that the analysis is easiest with the somewhat unusual
choiceU2,∞. Hence we begin by analyzingG
qcl(α)in this space.
To begin, we formulate a lemma in which we compute the operator norm of Gqcl(α)explicitly. Its proof is slightly technical and is therefore postponed to
Ap-pendix 8.2.
Lemma 8.If N≥4, then
Gqcl(α)U2,∞=
1−α 1−
2φ200F AF
+α
2φ200F AF
.
What is remarkable (though not necessarily surprising) about this result is that the operator norm ofGqcl(α)is independent ofNandK. This immediately puts us
into a position where we can obtain contraction properties of the iteration matrix Gqcl(α), that are uniform in NandK. It is worth noting, though, that the optimal contraction rate is not uniform asAF approaches zero; that is, the preconditioner
does not give uniform efficiency as the system approaches its stability limit.
Theorem 3.Suppose that N≥4, AF>0,andφ2F00 ≤0, and define
αoptqcl,2,∞:= AF
AF+2|φ2F00 |
= 2AF
φF00+AF
and αmaxqcl,2,∞:=2AF
φF00 .
Then Gqcl(α)is a contraction ofU2,∞if and only if0<α<αmaxqcl,2,∞, and for any
such choice the contraction rate is independent of N and K. The optimal choice is
α=αoptqcl,2,∞, which gives the contraction rate
Gqcl αoptqcl,2,∞
U2,∞=
1−AFφ00
F
1+AF
φF00 <1.
Proof. Note thatαoptqcl,2,∞=1/ 1− 2φ200F
AF
kGqcl(α)kU2,∞ =1−α 1−2
φ200F AF
−2αφ
00
2F
AF =1−α=:m1(α).
The optimal choice is clearlyα=αoptqcl,2,∞which gives the contraction rate
Gqcl αoptqcl,2,∞
U2,∞=α
qcl,2,∞
opt
2φ2F00
AF
=
2|φ2F00 | φF00+2φ2F00 =
1−AFφ00
F
1+AF
φF00 .
Alternatively, ifα≥αoptqcl,2,∞,then
Gqcl(α)U2,∞=α 1−
4φ200F AF
−1=αφ 00
F
AF−
1=:m2(α).
This value is strictly increasing with α, hence the optimal choice is again α =
αoptqcl,2,∞.
Moreover, we havem2(α)<1 if and only if
α<2AF φF00 =α
qcl,2,∞
max .
Since, for α =αoptqcl,2,∞ we have m1(α) =m2(α)<1, it follows that αmaxqcl,2,∞>
αoptqcl,2,∞(as a matter of fact, the conditionαmaxqcl,2,∞>αoptqcl,2,∞is equivalent toAF>0).
In conclusion, we have shown thatkGqcl(α)kU2,∞ is independent ofNandKand
that it is strictly less than one if and only if α <αmaxqcl,2,∞, with optimal value
α=αoptqcl,2,∞.
As an immediate corollary, we obtain the following general convergence result.
Corollary 1.Suppose that N≥4, AF>0,φ2F00 ≤0, and suppose thatk·kXis a norm
defined onU such that
kukX≤CkukU2,∞ ∀u∈U.
Moreover, suppose that0<α<αmaxqcl,2,∞. Then, for any u∈U,
Gqcl(α)nu
X≤qˆ nC
kukU2,∞→0 as n→∞,
whereqˆ:=kGqcl(α)kU2,∞<1.
In particular, the convergence is uniform among all N, K and all possible initial values u∈U for which a uniform bound onkukU2,∞ holds.
Proof. We simply note that, according to Theorem 3, for 0<α<αmaxqcl,2,∞, we have
Gqcl(α)nU2,∞≤qˆ
n,
where ˆq:=kGqcl(α)kU2,∞<1 is a number that is independent ofNandK. Hence,
Gqcl(α)nu
X≤C
Gqcl(α)nu
U2,∞≤Cqˆ
n
kukU2,∞.
Remark 2.Although we have seen in Theorem 3 and Corollary 1 that the linear stationary method with preconditionerAFLand with sufficiently small step sizeα
is convergent, this convergence may still be quite slow if the initial data is “rough.” Particularly in the context of defects, we may, for example, be interested in the convergence properties of this iteration when the initial residual is small or moderate inU1,p, for somep∈[1,∞], but possibly of orderO(N)in theU2,∞-norm. We can
see from the following Poincar´e and inverse inequalities
kukU1,∞≤
1
2kukU2,∞ and kukU2,∞≤2NkukU1,∞ for allu∈U;
that the application of Corollary 1 to the caseX=U1,∞gives the estimate
Gqcl(α)nuU1,∞ ≤qˆ
nN
kukU1,∞ for allu∈U.
Similarly, withX=U1,2, we obtain
Gqcl(α)nuU1,2≤qˆnN3/2kukU1,2 for allu∈U. (27)
We have seen in Proposition 4 that a direct convergence analysis inU1,p,p<∞,
may be difficult with analytical methods, hence we focus in the next section on the caseU1,∞.
6.2 Analysis of the QCL preconditioner in
U
1,∞As before, we first compute the operator norm of the iteration matrix explicitly. The proof of the following lemma is again postponed to the Appendix 8.2.
Lemma 9.If K≥3,N≥max(9,K+3), andφ2F00 ≤0, then
Gqcl(α)
U1,∞=
1−α+α4
φ200F AF
for0≤α≤α
qcl,1,∞
opt ,
1−α 1−2φ 00
2F
AF
+α(6+2ε−4εK)
φ200F AF
forα
qcl,1,∞
opt ≤α,
where
αoptqcl,1,∞:=
h
1+ (2+ε−2εK)
φ200F AF
i−1
satisfiesαoptqcl,2,∞≤α qcl,1,∞
opt ≤1.
Again we note that the operator norm is independent, but now up to terms of order O(εK), of the system size.
Theorem 4.Suppose that K≥3,N≥max(9,K+3), andφ2F00 <0, then the
(i) IfφF00+8φ2F00 ≤0,then Gqcl(α)isnota contraction ofU1,∞, for any value ofα.
(ii) IfφF00+8φ2F00 >0,then Gqcl(α)is a contraction for sufficiently smallα. More
precisely, setting
αmaxqcl,1,∞:= 2AF
AF+ (8+2ε−4εK)|φ2F00 |,
we have that Gqcl(α)is a contraction ofU1,∞if and only if0<α<αmaxqcl,1,∞. The
operator normkGqcl(α)kU1,∞is minimized by choosingα=α
qcl,1,∞
opt (cf. Lemma
9) and in this case
Gqcl αoptqcl,1,∞
U1,∞=1−
φF00+8φ2F00
φF00+ (2−ε+2εK)φ2F00 <1.
Proof. Suppose, first, that 0<α≤αoptqcl,1,∞. Sinceαoptqcl,1,∞≤1 it follows that
Gqcl(α)U1,∞=1−α
φF00+8φ2F00
AF
,
and hencekGqcl(α)kU1,∞<1 if and only ifφF00+8φ2F00 >0. In that casekGqcl(α)kU1,∞
is strictly decreasing in(0,αoptqcl,1,∞].
Sinceαoptqcl,1,∞≥α qcl,2,∞
opt = (1−2
φ200F AF )
−1we can see that
kGqcl(α)kU1,∞is always
strictly increasing in[αoptqcl,1,∞,+∞)and hence ifφF00+8φ2F00 >0, thenα =αoptqcl,1,∞
minimizes the operator norm kGqcl(α)kU1,∞. Moreover, straightforward
compu-tations show that αmaxqcl,1,∞ >αoptqcl,1,∞ and that kGqcl(α)kU1,∞ <1 if and only if
0<α<αmaxqcl,1,∞.
We remark that the optimal value ofα inU1,∞, that isα =αoptqcl,1,∞, is not the
same as the optimal value,αoptqcl,2,∞,inU2,∞. However, it is easy to see thatαqcl,1,∞
opt =
αoptqcl,2,∞+O(εK), and hence, even thoughαoptqcl,2,∞is not optimal inU1,∞it is still
close to the optimal value. On the other hand,αmaxqcl,1,∞ andαmaxqcl,2,∞are not close,
since, if 4εK−2ε<1,then
αmaxqcl,1,∞≤ 2AF φF00+3|φ2F00 |<
2AF
φF00 =α
qcl,2,∞
max .
In summary, we have seen that the contraction property ofGqcl(α)inU1,∞ is
significantly more complicated than in U2,∞, and that, in fact, G
qcl(α) is not a
6.3 Analysis of the QCL preconditioner in
U
1,2Even though we were able to prove uniform contraction properties for the QCL-preconditioned iterative method inU2,∞, we have argued above that these are not
entirely satisfactory in the presence of irregular solutions containing defects. Hence we analyzed the iteration matrixGqcl(α) =I−α(AFL)−1LFqcfinU1,∞, but there we
showed that it is not a contraction up to the critical loadF∗. To conclude our results for the QCL preconditioner, we present a discussion ofGqcl(α)in the spaceU1,2.
We begin by noting that it follows from (21) that
P1/2e(n)= P1/2Gqcl(α)e(n−1)=P1/2
I−αP−1LqcfF
P−1/2
P1/2e(n−1)
= I−αP−1/2LqcfF P−1/2 P1/2e(n−1)
=:Geqcl(α)
P1/2e(n−1).
SincekP1/2vk`2
ε =A 1/2
F kvkU1,2forv∈U, it follows thatGqcl(α)is a contraction in
U1,2if and only if
e
Gqcl(α)is a contraction in`2ε. Unfortunately, we have shown in
Proposition 4 thatkGqcl(α)kU1,2 ∼N1/2asN→∞. Hence, we will follow the idea used in Section 5 and try to find an alternative norm with respect to whichGeqcl(α) is a contraction.
From Lemma 5 we deduce that there exists a similarity transform ˜S such that cond(S˜)≤N2, and such that
L−1/2LqcfF L−1/2=S˜−1
e
ΛqnlS˜,
whereΛeqnl is the diagonal matrix ofU1,2-eigenvalues(µqnlj )2Nj=−11 ofLqnlF . As an immediate consequence we obtain
e
Gqcl(α) =S˜−1 I−Aα
FΛe
qnl˜ S.
Proceeding as in Section 5, we would obtain thatkGeqcl(α)k`2
ε ≤O(N
2). Instead, we
observe that
Gqcl(α)u˜
STS˜=
S˜Geqcl(α)u`2
ε =
(I−Aα
FΛe
qnl)Su˜ `2
ε
≤ I− α
AFΛe
qnl `2
εk
˜ Suk`2
ε=j=1max,...,2N−1
1− α
AFµ
qnl j
kukS˜TS˜,
that is,
eGqcl(α)(α)˜
STS˜≤ max j=1,...,2N−1
1− α
AFµ
qnl j
. (28)
Thus, we can conclude thatGeqcl(α)is a contraction in thek · kS˜TS˜-norm if and only
if 0<α<αmaxqcl,1,2:=2AF/µ2Nqnl−1. Moreover, we obtain the error bound
where ˜q:= eGqcl(α) ˜
STS˜. This is slightly worse in fact, than (27), however, we note
that this large prefactor cannot be seen in the following numerical experiment. Moreover, optimizing the contraction rate with respect toα leads to the choice
αoptqcl,1,2:=2AF/(µ1qnl+µ2Nqnl−1), and in this case we obtain from Lemma 6 that
˜
q=q˜opt:=
eGqcl αoptqcl,1,2˜
STS˜=
µ2Nqnl−1−µ1qnl µ2Nqnl−1+µ1qnl ≤
1−AF
φF00
1+AF
φF00
,
where the upper bound is sharp in the limit K→∞. It is particularly interesting
to note that the contraction rate obtained here is precisely the same as the one in
U2,∞(cf. Theorem 3). Moreover, it can be easily seen from Lemma 6 thatαqcl,1,2
opt →
αoptqcl,2,∞asK→∞, which is the optimal stepsize according to Theorem 3. We further
have thatαmaxqcl,1,2→αmaxqcl,2,∞asK→∞.
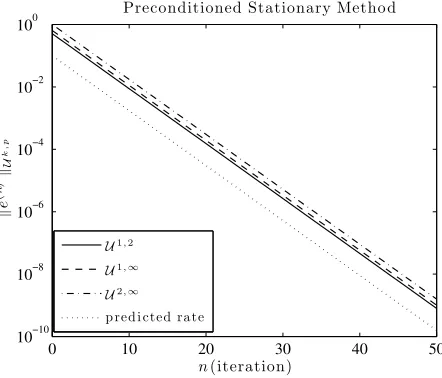
6.4 Numerical example for QCL-preconditioning
We now apply the QCL-preconditioned stationary iterative method to the QCF sys-tem with right-hand side (25),φF00=1,AF=0.2, and the optimal valueα=αoptqcl,2,∞
(we note thatGid(αoptqcl,2,∞)depends only onAF/φF00andN,bute(0)depends onAF
andφF00 independently). The error for successive iterations in theU1,2,U1,∞ and
U2,∞-norms are displayed in Figure 2. Even though our theory, in this case, predicts
a perfect contractive behavior only inU2,∞and (partially) inU1,2, we nevertheless
observe perfect agreement with the optimal predicted rate also in theU1,∞-norms.
As a matter of fact, the parameters are chosen so that case (i) of Theorem 4 holds, that is,Gqcl(α)isnota contraction ofU1,∞. A possible explanation why we still
observe this perfect asymptotic behavior is that the norm ofGqcl(α)is attained in a
subspace that is never entered in this iterative process. This is also supported by the fact that the exact solution is uniformly bounded inU2,∞asN,K
→∞, which is a
simple consequence of Proposition 3.
7 Preconditioning with QCE (
P
=
L
qceF): Ghost-Force Correction
We have shown in [5, 12] that the popularghost force correction method (GFC)is equivalent to preconditioning the QCF equilibrium equations by the QCE equilib-rium equations. The ghost force correction method in a quasi-static loading can thus be reduced to the question whether the iteration matrix
0 10 20 30 40 50 10−10
10−8 10−6 10−4 10−2 100
Preconditioned Stationary Metho d
n(iteration)
k
e
(
n
)k
U
k
,
p
U1,2
U1,∞ U2,∞
p red i cted rate
Fig. 2 Error of the QCL-preconditioned linear stationary iterative method for the QCF system with N=800,K=32,φF00=1,AF=0.2, optimal valueα=αoptqcl,2,∞,and right-hand side (25). In this case, the iteration matrixGqcl(α)isnota contraction ofU1,∞. Even though our theory predicts a
perfect contractive behavior only inU2,∞, we observe perfect agreement with the optimal predicted
rate also in theU1,2andU1,∞-norms.
is a contraction. Due to the typical usage of the preconditionerLqceF in this case, we do not consider a step sizeαin this section. The purpose of the present section is (i)
to investigate whether there exist function spaces in whichGqceis a contraction; and
(ii) to identify the range of the macroscopic strainsFwhereGqceis a contraction.
We begin by recalling the fundamental stability result for theLqceF operator, The-orem 1:
inf
u∈U
ku0k`2
ε
=1
hLqceF u,ui=AF+λKφ2F00 ,
whereλK∼λ∗+O(e−cK)withλ∗≈0.6595. This result shows that the GFC iteration
must necessarily run into instabilities before the deformation reaches the critical strainFc∗. This is made precise in the following corollary which states that there is no norm with respect to whichGqceis a contraction up to the critical strainF∗.
Corollary 2.Fix N and K, and letk·kXbe an arbitrary norm on the spaceU, then,
upon understanding Gqceas dependent onφF00andφ2F00 , we have
kGqcekX→+∞ as AF+λKφ2F00 →0.
[image:26.612.186.407.98.287.2]interested in the behavior asN→∞, that is, we will investigate in which function spaces the operator norm ofGqceremains bounded away from one asN→∞.
The-orem 2 on the unboundedness ofLqcfF immediately provides us with the following negative answer.
Proposition 5.If2≤K≤N/2,φ2F00 6=0, and AF+λKφ2F00 >0, then
kGqcekU1,2∼N1/2 as N→∞.
Proof. It is an easy exercise to show that, ifAF+λKφ2F00 >0, then theU1,2-norm is
equivalent to the norm induced byLqceF , that is,
C−1kukU1,2≤ kukLqce
F ≤CkukU1,2.
Hence, we havekGqcekU1,2 ≈ kGqcekLqce
F and by the same argument as in the proof
of Proposition 4, and using again the uniform norm-equivalence, we can deduce that
Gqce
U1,2 ≈
LqcfF
L(U1,2,U−1,2)±1∼N1/2 asN→∞.
Since the operator(LqceF )−1Lqcf
F is more complicated than that of(AFL)−1LqcfF ,
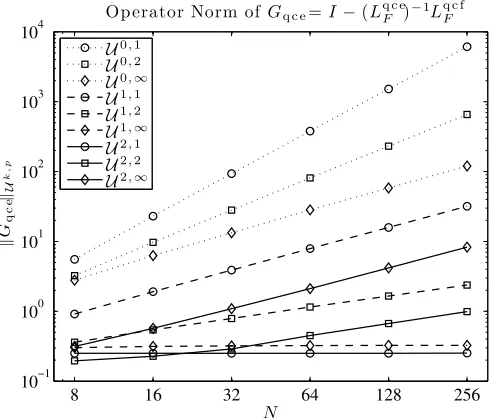
which we analyzed in the previous section, we continue to investigate the contrac-tion properties ofGqcein various different norms in numerical experiments. In
Fig-ure 3, we plot the operator norm ofGqce, in the function spaces
Uk,p, k=0,1,2, p=1,2, ∞,
against the system sizeN (see Appendix 8.3 for a description of how we compute kGqcekUk,p). This experiment is performed forAF/φF00=0.8 which is at some
dis-tance from the singularity ofLqceF (we note thatGqce depends only onAF/φF00 and
N since both(φF00)−1LqcfF and(φF00)−1LqceF depend only onAF/φF00 andN). The
ex-periments suggests clearly thatkGqcekUk,p→∞asN→∞for all norms except for
U1,∞andU2,1.
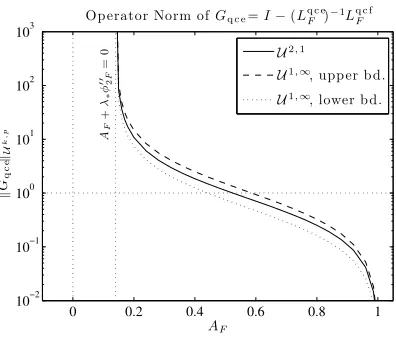
Hence, in a second experiment, we investigate howkGqcekU1,∞ andkGqcekU2,1 behave, for fixedNandK, asAF+λKφ2F00 approaches zero. The results of this
ex-periment, which are are displayed in Figure 4, confirm the prediction of Corol-lary 2 thatkGqcekUk,p→∞asAF+λKφ2F00 approaches zero. Indeed, they show that
kGqcekUk,p >1 already much earlier, namely around a strainF whereAF≈0.52
andAF+λKφ2F00 ≈0.44.
8 16 32 64 128 256 10−1
100 101 102 103 104
N
k
Gq
c
e
kU
k
,
p
Operator Norm of Gq c e=I−(Lq c eF )−1L
q c f F
U0,1
U0,2
U0,∞
U1,1
U1,2
U1,∞
U2,1
U2,2
U2,∞
Fig. 3 Graphs of the operator normkGqcekUk,p,k=0,1,2,p=1,2,∞, plotted against the number of atoms,N, with atomistic region sizeK=d√Ne−1, andAF/φF00=0.8. (The graph for theU1,p
-norms,p=1,∞, are only estimates up to a factor of 1/2; cf. Appendix 8.3.) The graphs clearly indicate thatkGqcekUk,p→∞asN→∞in all spaces except forU1,∞andU2,1.
definite statement, it shows at the very least that further investigations for more realistic model problems are required.
Conclusion
We proposed and studied linear stationary iterative solution methods for the QCF method with the goal of identifying iterative schemes that are efficient and reliable for all applied loads. We showed that, if the local QC operator is taken as the pre-conditioner, then the iteration is guaranteed to converge to the solution of the QCF system, up to the critical strain. What is interesting is that the choice of function space plays a crucial role in the efficiency of the iterative method. InU2,∞, the
con-vergence is always uniform inN andK, however, inU1,∞this is only true if the
macroscopic strain is at some distance from the critical strain. This indicates that, in the presence of defects (that is, non-smooth solutions), the efficiency of a QCL-preconditioned method may be reduced. Further investigations for more realistic model problems are required to shed light on this issue.
[image:28.612.172.418.96.305.2]strains that are far lower than the critical strainF∗,we show thatkGqcekU1,2∼N1/2. We then give numerical experiments that suggest thatkGqcekUk,p →∞asN→∞
for all tested norms except forU1,∞andU2,1.
The results presented in this paper demonstrate the challenge for the development of reliable and efficient iterative methods for force-based approximation methods. Further analysis and numerical experiments for two and three dimensional prob-lems are needed to more fully assess the implications of the results in this paper for realistic materials applications.
8 Appendix
8.1 Proof of Theorem 1
The purpose of this appendix is to prove the sharp stability result for the operator LFqce, formulated in Theorem 1. Using Formula (23) in [11] we obtain the following representation ofLqceF ,
0 0.2 0.4 0.6 0.8 1
10−2
10−1
100
101
102
103
AF
k
Gq
c
e
kU
k
,
p
Operator Norm ofGq c e=I−(Lq c eF )−1L
q c f
F
AF
+
λ∗
φ
′′ 2F
=
0 U2,1
U1,∞, upper bd. U1,∞, lower bd.
Fig. 4 Graphs of the operator normkGqcekUk,p,(k,p)∈ {(1,∞),(2,1)}, for fixedN=256,K= 15,φF00=1, plotted againstAF. For the caseU1,∞only estimates are available and upper and lower
bounds are shown instead (cf. Appendix 8.3). The graphs confirm the result of Corollary 2 that
kGqcekUk,p→∞asAF+λKφ200F→0. Moreover, they clearly indicate thatkGqcekUk,p>1 already for strainsFin the regionAF≈0.5, which are much lower than the critical strain at whichLqceF
[image:29.612.196.394.342.511.2]
LqceF u,u=
(
−K−2
∑
`=−N+1
εAF|u0`|2+
N
∑
`=K+3
εAF|u0`|2 )
+
(
K−1
∑
`=−K+2
ε
AF|u0`|2−ε2φ2F00 |u00`|2
)
+ε
n
(AF−φ2F00 )(|u−0 K+1|2+|u0K|2) +AF(|u0−K|2+|u0K+1|2)
+ (AF+φ2F00 )(|u0−K−1|2+|u0K+2|2)
−1 2ε
2
φ2F00 (|u00−K|2+|u00−K−1|2+|u00K|2+|u00K+1|2)o.
(29)
Ifφ2F00 <0,then we can see from this decomposition that there is a loss of stability
at the interaction between atoms−K−2 and−K−1 as well as between atomsK+1 andK+2. It is therefore natural to test this expression with a displacement ˆudefined by
ˆ u0`=
1, `=−K−1,
−1, `=K+2,
0, otherwise.
From (29), we easily obtain
LqceF uˆ,uˆ
=AF+12φ2F00 .
In particular, we see that, ifAF+12φ2F00 <0,thenLqceF is indefinite. On the other
hand, it was shown in [8] thatLqceF is positive definite providedAF+φ2F00 >0. (As a
matter of fact, the analysis in [8] is for periodic boundary conditions, however, since the Dirichlet displacement space is contained in the periodic displacement space the result is also valid for the present case.)
Thus, we have shown that
inf
u∈U
ku0k`2
ε
=1
LqceF u,u=AF+µ φ2F00 , where12≤µ≤1.
To conclude the proof of Theorem 1, we need to show thatµdepends only onKand
that the stated asymptotic result holds.
From (29) it follows thatLqceF can be written in the form
LqceF u,u= (u0)THu0,
where we identifyu0 with the vector u0= (u0`)N
`=−N+1 and whereH ∈R 2N×2N.
H2= . .. . .. . .. 1 2 1
1 2 1 1 3/2 1/2
1/2 3 1/2 1/2 9/2 0
0 4 0 0 4 0
. .. . .. . ..
Here, the row with entries[1,3/2,1/2]denotes theKth row (in the coordinatesu0k). This form can be verified, for example, by appealing to (29). Letσ(A)denote the spectrum of a matrixA. Since, by assumption,φ2F00 ≤0, the smallest eigenvalue of
H is given by
minσ(H) =φF00+φ2F00 maxσ(H2),
that is, we need to compute the largest eigenvalue ¯λ ofH2. SinceH2ek=4ekfor
k=K+3,K+4, . . . and forK=−K−2,−K−3, . . ., and since eigenvectors are orthogonal, we conclude that all other eigenvectors depend only on the submatrix describing the atomistic region and the interface. In particular, ¯λdepends only onK
but not onN. This proves the claim of Theorem 1 thatλK depends indeed only on
K.
We thus consider the{−K−1, . . . ,K+2}-submatrixH¯2, which has the form
¯
H2=
9/2 1/2 1/2 3 1/2
1/2 3/2 1
1 2 1
. .. . .. . ..
1 2 1
1 3/2 1/2 1/2 3 1/2
1/2 9/2
.
LettingH¯2ψ=λ ψ, then for`=−K+2, . . . ,K−1,
ψ`−1+2ψ`+ψ`+1=λ ψ`,
and hence,ψhas the general form
ψ`=az`+bz−`, `=−K+1, . . . ,K,
leavingψ`undefined for`∈ {−K,−K−1,K+1,K+2}for now, and wherez,1/z are the two roots of the polynomial
z2+ (2−λ)z+1=0.
z= (1
2λ−1) +
q
(1
2λ−1)2−1>1. (30)
To determine the remaining degrees of freedom, we could now insert this general form into the eigenvalue equation and attempt to solve the resulting problem. This leads to a complicated system which we will try to simplify.
We first note that, for any eigenvectorψ, the vector(ψK−`)is also an eigenvector, and hence we can assume without loss of generality thatψis skew-symmetric about
`=1/2. This implies thata=−b. Since the scaling is irrelevant for the eigenvalue problem, we therefore make theansatzψ`=z`−z−`. Next, we notice that forK suf-ficiently large the termz−`is exponentially small and therefore does not contribute to the eigenvalue equation near the right interface. We may safely ignore it if we are only interested in the asymptotics of the eigenvalue ¯λ asK→∞. Thus, letting
ˆ
ψ`=z`,`=1, . . . ,Kand ˆψ`unknown,`=K+1,K+2, we obtain the system
zK−1+3 2z
K+1
2ψˆK+1= λˆz K,
1 2z
K+3 ˆ
ψK+1+12ψˆK+2= λˆψˆK+1, 1
2ψˆK+1+92ψˆK+2= λˆψˆK+2.
The free parameters ˆψK+1,ψˆK+2can be easily determined from the first two
equa-tions. From the final equation we can then compute ˆλ. Upon recalling from (30) that
ˆ
zcan be expressed in terms of ˆλ, and conversely that ˆλ= (zˆ2+1)/zˆ+2, we obtain
a polynomial equation of degree five for ˆz,
q(zˆ):=4ˆz5−12ˆz4+9ˆz3−3ˆz2−4ˆz+2=0.
Mathematica was unable to factorizeqsymbolically, hence we computed its roots numerically to twenty digits precision. It turns out thatqhas three real roots and two complex roots. The largest real root is at ˆz≈2.206272296 which gives the value
ˆ
λ=zˆ
2+1
ˆ
z +2≈4.659525505897.
The relative errors that we had previously neglected are in fact of order ˆz−2K, and hence we obtain
λK=λ∗+O(e−cK), where λ∗≈0.6595 and c≈1.5826.
This concludes the proof of Theorem 1.