2016 International Conference on Electronic Information Technology and Intellectualization (ICEITI 2016) ISBN: 978-1-60595-364-9
Research on Software Framework and
Validation of a High-pressure Fuel Injection
System
Jiasi Wang, Ying Zhang, Liang Xiang and Ting Sun
ABSTRACT
High-pressure fuel injection system is one of the core subsystems of various kinds of power machinery, the electronic control regulation is the foundation of this system to achieve high precision and intelligent control, and the control software is the core of the system. This Paper has developed the composition and the control software framework of the high-pressure fuel system, designed the different levels of tasks and carried on the division of prioritization. In order to verify the software function and part of performance of the power machinery, we have done the control experiment of the high-pressure common rail fuel injection. The results show that it can realize the control of the fuel injection quantity by the injection pulse width through the electronic control fuel injection system, and improve the stability of rail pressure fluctuation by changing the prioritization of tasks.
INTRODUCTION
Electronic control high-pressure fuel injection system is a core subsystem of power machinery electronic control unit (ECU). Virtually, it has evolved from the simplest fuel quantity-speed regulation (mechanical in-line pump) towards fuel injection quantity, injection timing, injection rate and other wider fields. The system aims to decouple the fuel injection system and the power machinery body, make fuel injection completely flexible and adjustable and achieve better effect of combustion and emission in combination with other auxiliary control means.
_________________________
For a long term, in order to achieve less fuel consumption and emission, the systems of power machinery have been upgraded through researches. Also, mechanical injection control mechanisms such as mechanical speed regulator and injection advance device have been developed one by one. These control mechanisms could effectively control the major parameters influencing emission and economic efficiency of motors. Nevertheless, these mechanisms prove to be poor in both regulation capacity and control effect. Some studies have demonstrated the following results: if 1°crank angle is changed at the commencement of injection, there will be 2% change in fuel consumption rate, 16% change in HC emission and 6% change in NOx emission; And it is quite hard for the mechanical injection advance device to obtain injection advance angle control of high precision [1].
Additionally, mechanical injection control system is unable to achieve the regulation level featuring flexibility and intelligence. Practically, either fuel delivery per cycle of power machinery (control of rack displacement) or injection advance angle (control of injection commencement) is constrained by several factors, with different optimal values at every moment. To achieve optimal motor operation, multiple parameters must be tested and controlled in a real-time manner. Obviously, mechanical control is constrained in system. Thus, in order to make power machinery more economical and emission reduced, electronic high-pressure fuel injection system becomes a necessary option for power machinery [2].
COMPOSITION OF HIGH-PRESSURE FUEL INJECTION CONTROL SYSTEM
High-pressure fuel injection system is normally one of the core subsystems of power machinery electronic control unit (ECU). With logic structure similar to most automatic control systems, the common power machinery ECU is mainly composed of sensor, actuator and controller. Normally, signals are divided into analog signals (coolant temperature, accelerator pedal and pulse signals (such as crank and camshaft signals)). The actuator of the output is mainly the actuating element with fuel injector as the core. Additionally, there is a information bus for information interaction with the outside, such as CAN and SCI. The system is the basis for operation of control software.
ARCHITECTURAL DESIGN OF POWER MACHINERY FUEL INJECTION SYSTEM CONTROL SOFTWARE
Division of Lower-layer Related Tasks
embedded system may be divided into two categories, lower-layer related tasks and lower-layer non-related tasks.
The specific division of each type of tasks is described in details below. A lower-layer related task means the task relates to a specific lower-layer hardware. Most of the tasks are driven by lower layer hardware. The lower-layer related tasks mainly include:
DRIVING TASKS
The main actuating elements of power machinery include fuel injector, fuel metering valve (common rail system) and auxiliary actuator for air intake. Fuel driving does not only require the control of injection time and quantity but also the control of injection rate. With high requirements for precision and real-time performance, fuel driving represents one of the most complicated driving parts in power machinery system. According to the principles of functional cohesion and time criticality, injection related driving functions shall be integrated into one task. With a high demand for real-time performance, the task shall adopt interrupt trigging. For common rail power machinery, rail pressure produces a huge influence on the performance of power machinery. In terms of common rail control, PWM is used to control the opening of fuel metering valve and then rail pressure. Normally, the control strategy of “feed-forward +PID feedback” is adopted and it is closely related to realization. Based on the principles of I/O reliance and functional cohesion, the control regarding common rail may be deemed as one task. The task triggers some auxiliary equipment of power machinery, such as turbocharger and EGR. For the driving of such equipment, based on the principles of I/O and functional cohesion, each actuators shall be regarded as an independent task so as to get it right. These tasks are also triggered by means of timing.
COMMUNICATION
The control system adopts two communication modes, namely CAN and SCI. Both modes relate to data interaction and hardware support. According to the principle of I/O reliance, CAN and SCI communications are respectively classified into one task. Both tasks involve receiving, transmission and data processing. For CAN communication task, data processing tends to refer to a specific communication protocol such as CCP. For SCI communication task, the data processing method is normally customized and is relatively simple. Both tasks may adopt timing or interrupt methods for trigging.
DATA ACQUISITION
digital system. These parameters are with a little rate of change and their sampling cycles can be set even longer, normally between 100ms to 500ms. And some analog signals are with a larger change rate and appear quite important, such as accelerator pedal signals, which can directly reflect the operating intention of the driver. A longer sampling cycle is unable to satisfy the demand for control. According to the principles of time criticality and functional cohesion, two data acquisition tasks shall be classified, namely high-speed acquisition and low-speed acquisition, so as to satisfy the requirements for signals with different sampling frequencies. These kinds of tasks are activated by means of trigger timing.
Rail pressure signals appear quite important for rail pressure control as to common rail power machinery. Only high sampling frequency can satisfy the demand for control. Thus, the function as module configuration system is required. The function is used to configure both hardware and software so as to facilitate software cutting and transplantation. In case of fault diagnosis, the system can make a purposeful diagnosis according to system configuration, which can not only improve suitability of diagnostic program but also reduce system power consumption.
After normal starting, the system needs to initialize global variables and software module functions so as to ensure predictability of system operation and prevent overflow of program during operation. The initialization process is essential for any system. Interrupt and abnormality are inevitably used as some operations in the system need to synchronize with external events. Although some important interrupts could be initially configured by embedded system, other interrupts need to be configured by the user. The embedded system would provide API functions to help the user to link interrupts to interrupt service tasks. Similar to hardware configuration, the whole process shall be prioritized after system starting. Actually, the three parts above perform the function of system configuration and initialization of hardware and software and operate after system is started. According to the principles of functional cohesion and time cohesion, one task shall be set up in the three parts. Interrupt-related tasks and functions demand more for real-time performance. In power machinery system, interrupt-related functions include crank signal acquisition, camshaft signal acquisition and communication, etc. In the embedded system, the tasks must be linked to interrupts. It only performs the function of signal synchronization. And specific processing is realized in other tasks. These types of tasks are triggered by the interrupt service task. According to the principles of functional cohesion and time criticality, all functions relating to interrupts shall be integrated into one task.
Hardware Operation Non-related Tasks
SIGNAL PROCESSING TASKS
The signals input from the sensor to the system are the basis of system control on power machinery. However, as these signals are followed by some interferences, they need to be processed, such as acquisition of average rotation speed, instantaneous rotation speed and angular acceleration of the system from rotation signals, and the filtering of coolant temperature to acquire the current real temperature. This function is especially important. According to the principles of functional cohesion and time criticality, one signal processing task may be set up. The task is triggered by high-speed data acquisition task.
OPERATING CONDITIONS
In addition to normal status, the system also has three abnormal statuses, namely starting, idling and protection. Starting is the process when power machinery moves from conditions of rest to operation, with abrupt change in status and complicated control functions involved. For example, the system needs to finish cylinder detection and transit the fuel-injection quantity from open loop to closed loop. Additionally, the control parameters of the process, such as starting fuel quantity, would change as the environment changes. Under adverse environment, auxiliary starting function may help the system to smoothly start. According to the principles of functional cohesion and time cohesion, one task may be set up regarding the functions relating to starting. Idling is a status when power machinery keeps rotation speed within a fixed range with the least fuel consumption, and the rotation speed may change as the environment changes. Different from normal operating conditions, if loads are added, the system can automatically control fuel supply and effectively adjust loading capacity, and the whole process is realized by means of automatic control. According to the principles of time cohesion and functional cohesion, one task may be established regarding functions relating to idling. Protection is a status of protection on power machinery when serious fault occurs to the machinery. The output capacity of the system would be limited, such as power, torque and rotation speed, and only the stability of fuel injection and rotation speed can be basically ensured. Normally, under such status, defective parameters would be replaced, some tasks closed and data entry redefined so as to realize the function of protection. According to the principles of functional cohesion, time criticality and periodicity, functions relating to system protection shall be integrated into one task.
STATUS JUDGMENT
According to the principles of functional cohesion and time criticality, status judgment shall be deemed as one task. The task is triggered in a timing manner and operates at a high frequency.
FUEL QUANTITY CONTROL
In power machinery system, the control of fuel into the cylinder is the core of power machinery control. Power machinery represents qualitative adjustment. And the quantity of fuel into the cylinder reflects output of power machinery, especially in the control strategy based on torque. Fuel quantity calculation is relatively complicated and has a high concentration of functions. According to the principles of functional cohesion, fuel quantity control shall be regarded as an independent task to facilitate the modification and optimization of control algorithms.
AIR INTAKE CALCULATION
Air intake calculation has the following two purposes: providing basis and parameters for air intake system of power machinery; and offering corrected parameters for the control of power machinery fuel quantity. Power machinery has complicated air intake conditions. The model based air intake calculation is complex and has a large load in calculation. And the function does not require much for real-time performance and calculation may be conducted in case of sufficient system resources. According to the principles of functional cohesion and reduction of data transmission, air intake calculation can be classified into one task.
FAULT DIAGNOSIS
As OBD2 becomes standard configuration of vehicles, fault diagnosis, as a function, has played an important and increasingly important role in system. According to the principle of functional cohesion, fault diagnosis-related functions may be regarded as one task.
The task priority chart was designed based on the importance of fuel injection system functions and task implementation frequency.
RESEARCH ON POWER MACHINERY ELECTRONIC FUEL INJECTION SYSTEM TEST
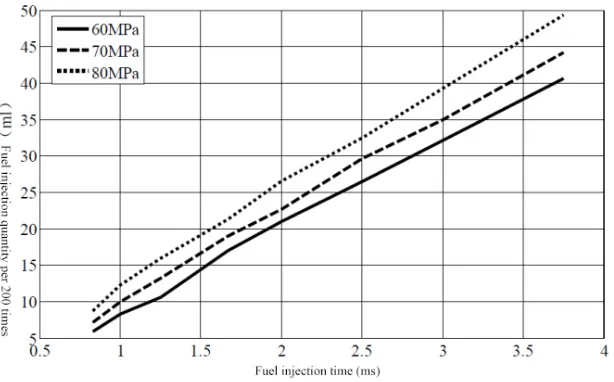
Common rail system adopts time-pressure control. Time is not absolute time. As the absolute time at the different rotation speeds and the same injection angle is different,
Figure 1. Changes in Fuel Injection Quantity under Different Rail Pressures.
the fuel quantity for the same rotation angle under the same rail pressure would also differ. If injection angle is converted into actual time, the relationship between fuel injection and injection time under different pressure would be obtained, as shown in Figure 1. below. It can be seen from the figure that the actual injection time is directly proportional to fuel injection under the same rail pressure and the overall linearity proves to be relatively good. There is only slight fluctuation on the three curves, which is mainly caused by measuring precision and rail pressure control precision.
CONCLUSION
High-pressure fuel injection system control software is the key to accurate the regulation of fuel systematically. In addition to operating system, the control software developed also includes hardware related and hardware non-related layers. Task division depends on importance of task target and task execution frequency. In order to verify the adjustment of the basic functions and performance of the control software, software verification test was conducted on the high-pressure common rail fuel injection system test bench and the fuel-injection quantity influence test with varying rail pressure and pulse width was also carried out, which proves software can control the linear changes of fuel quantity. The test with task priority changed was conducted, showing that the fluctuation of rail pressure can drop from 3.75% to 1.2% after the priority of rail pressure regulation tasks is changed.
REFERENCES
1. Xu Jialong. Diesel Engine Electronic Controlled Fuel Injection Technique [M]. China Communications Press, Beijing, 2011.7.