An Enhanced Hybrid 3D Localization Algorithm
Based on APIT and DV-Hop
https://doi.org/10.3991/ijoe.v13i09.7255
Lianjun Yi!!"
Science and Technology College GanNan Normal University, Ganzhou, Jiangxi, P.R. China [email protected]
Miaochao Chen
Chaohu University, Hefei, P.R. China
Abstract—Wireless sensor networks (WSN), as a new method of infor-mation collection and processing, has a wide range of applications. Since the acquired data must be bound with the location information of sensor nodes, the sensor localization is one of the supporting technologies of wireless sensor net-works. However, the common localization algorithms, such as APIT algorithm and DV-Hop algorithm, have the following problems: 1) the low localization accuracy of beacon nodes; 2) the low coverage rate in sparse environment. In this paper, we combine APIT algorithm and DV-Hop algorithm to design an enhanced hybrid 3D localization algorithm, which can improve the localization accuracy with a high coverage rate. The proposed hybrid algorithm can reduce the triangles in the triangle interior point test (PIT) and select good triangles to improve the localization accuracy of the beacon nodes in dense environments in dense environments. In addition, the algorithm can combine the advantages of APIT algorithm and DV-Hop algorithm localization algorithm to calculate the unknown node coordinates, and the location coverage of the beacon nodes in sparse environment can also be improved. Simulation results show that the pro-posed hybrid algorithm can effectively improve the localization accuracy of beacon nodes in the dense environment and the location coverage of beacon nodes in sparse environment.
Keywords—Hybrid 3D location algorithm, APIT algorithm, DV-Hop algo-rithm
1
Introduction
more and more attention to environmental supervision issues. Thus wireless sensor network technology plays an important role to solve some problems in environmental monitoring [3]. Generally, the wireless sensor nodes are randomly deployed in the environment monitoring area, and the nodes need to obtain information about the monitoring area, so the location of the nodes is critical. It is not practical to manually deploy or install a GPS receiver for all sensor nodes, which are limited by the cost, power consumption and scalability. Most of the sensor nodes do not have the location information, but the location information of the nodes has a crucial effect on the whole wireless sensor network monitoring application [4]. Therefore, it is very im-portant to apply the localization technology in wireless sensor networks.
The nodes in the wireless sensor network forward the collected data information to the monitor in the form of multi-hop routing. In the monitoring area, the nodes are randomly deployed and the wireless communication network is self-organized, which means each of the sensor nodes can dynamically find the neighbor nodes, their own localization, and network communication connection [5]. The nodes in the network are stronger than the common nodes in hardware configuration and function. They are connected with the external network to collect the monitoring data of ordinary nodes and then process and organize them. Then these data are sent to the base station in multi-hop forwarding mode. Thus the monitored data information is then sent by the base station to the end user using a satellite channel or a wired network [6]. In the wireless sensor network, nodes are usually divided into two kinds, one for the un-known node (Unun-known Node) and the other for the beacon node (Beacon Node). The general node of the location information is unknown, while the beacon node location information is known, because the beacon node can obtain their own location coordi-nates through its own GPS localization device [7]. In addition, the deployment densi-ty of beacon nodes is much smaller than that of the general nodes. Unknown nodes can communicate within the radius of the neighbor nodes, and they can use the bea-con node to calculate the location information by using the localization algorithms.
net-work is sufficient. So the distance-independent localization technology is increasingly concerned by the researchers.
The most common distance-independent localization algorithms are APIT algo-rithm and DV-Hop algoalgo-rithm [14]: 1) APIT localization algoalgo-rithm has many ad-vantages, such as widely suitable environment, low complexity, low cost and easy implementation. In order to improve the localization accuracy of APIT algorithm, authors [7] proposed the use of angle summing to reduce the misjudgment of whether an unknown node is in the triangle; In order to improve the APIT algorithm in the beacon node sparse environment localization coverage, authors [9] proposed a hybrid algorithm based on RSSI and APIT to reduce the localization error and improve the localization coverage. 2) The DV-Hop algorithm is a typical localization algorithm without distance measurement technology, which has a good distribution and scalabil-ity with the use of distance vector routing and GPS localization. The accuracy of the DV-Hop algorithm mainly depends on the estimated accuracy of the average distance per hop, which is related to the actual distance between the nodes, and the topology of the network also has a certain influence on the localization accuracy [15]. The DV-Hop algorithm is generally only applicable to the isotropic dense network. In the three-dimensional network environment, the three beacon nodes, which are used for localization collinear or close to the collinear, will lead to a larger position error and may lead to the maximum error of up to 200%. In this paper, the concept of colline-arity is introduced in the three-dimensional space to constrain the topological relations between the beacon nodes and the unknown nodes [16]. The computational complexi-ty is greatly reduced and the nodes are more energy efficient. For the actual environ-ment, the requirement is that the nodes should be distributed in three-dimensional network space, so that the classic two-dimensional localization algorithm is no longer applicable. Therefore, several three-dimensional localization algorithms have been proposed to improve the localization accuracy in the literature [17-18]. The authors [17] combined the Hop with cube shell intersection method, in which the DV-Hop was used to get the unknown node’s initial positions and the cube radius scale was used to obtain the final position. In addition, the authors [18] extended the range-free algorithm Time of Arrival based DV-Hop (TOADV-Hop) to 3-D space for im-proving the aspects of traffic and positioning error. These DV-Hop based 3-D locali-zation algorithms have been proposed to improve the localilocali-zation accuracy. In this paper, we will combine both the 3-D DV-Hop algorithm and APIT algorithm to ob-tain a better localization performance. In conclusion, there are some problems in the localization of APIT algorithm and DV-Hop algorithm, and they have the problem of low coverage in sparse environment.
2
Design of Hybrid 3D Localization Algorithm
2.1 APIT algorithm
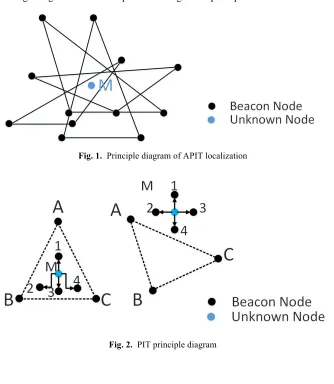
algo-which can communicate with it through the information transmission with the sur-rounding beacon nodes. Assuming that there are n elements in the set and any three nodes are chosen to form a triangle, a total of C3n triangles can be formed. It is judged that the position of the unknown node is inside the triangle or outside the tri-angle, and then the other three nodes are selected to determine the position of the unknown node until all triangles are exhausted [19]. Then, the overlapping area of all triangles can be calculated and further the area where the unknown node is located can be gradually reduced. Finally the centroid of the overlapping area can be obtained as the estimated coordinates of the unknown node. As shown in Figure 1, the overlap-ping portion of all available triangles is the approximate position where the unknown node is located, and the centroid of the overlapping portion represented by point M is the position where the unknown node is located.
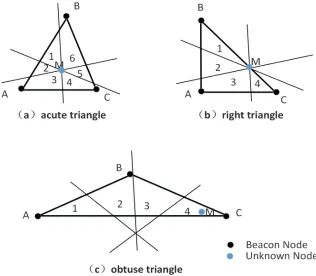
The most important part of the APIT algorithm is to determine whether the un-known node is inside or outside the triangle. In this regard, the best-point-in-triangle-! (PIT) test algorithm can be used to determine whether the unknown node is inside the triangle. Figure 2 shows the specific PIT algorithm principle.
Fig. 1. Principle diagram of APIT localization
A, B, and C are the three vertices of the triangle, and M is the unknown node that needs to be confirmed. Let the M point moves in any direction. When the M point is in the movement process and there is a point with the move to the M point, distances from the M point to A, B, C are increased or decreased at the same time, thus the point M is located outside the triangle; otherwise, M is located inside the triangle, which follows the PIT principle.
Enhanced APIT algorithm. In the edge of the entire wireless sensor network, the number of unknown nodes and beacon nodes is relatively small, so the number of triangles will be reduced [20]. In the PIT algorithm for localization, the deviation of the actual location and the localization position will be too large due to the excessive overlap of triangles.
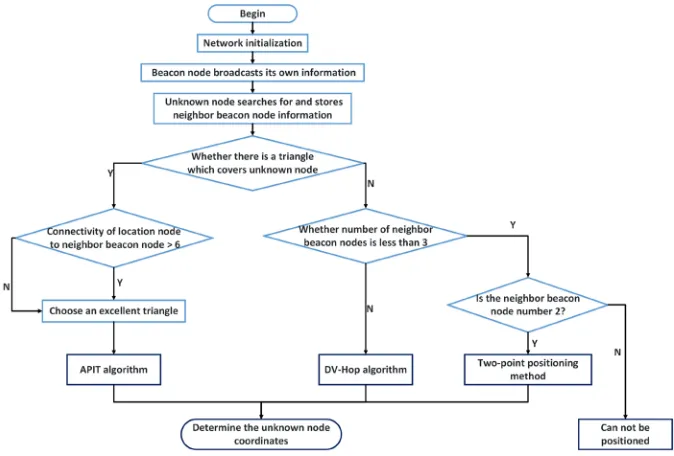
In order to improve the localization accuracy of wireless sensor networks, an im-proved APIT algorithm is proposed. The imim-proved APIT algorithm is implemented on the basis of changes in the signal strength of the unknown node received by the beacon node. As shown in Figure 3, when the target node moves in the direction of 1, the signal strength of the three beacon nodes have different with different changes of length. The signal strength of the A beacon node will be increased, while the signal strength of C target node will be smaller [21]. The improved APIT algorithm is to narrow the area of the unknown node M within the triangle and improve the localiza-tion accuracy of the node. The concrete realizalocaliza-tion is to divide the triangle, thus the triangle can be divided into several small intervals, and then the triangle will be fur-ther divided into several small intervals. From the vertical division of the triangle, we can see that the acute angle triangle is divided into six small regions, while the right triangle and the obtuse angle triangle are divided into four small areas. Perpendicular segmentation of three kinds of triangles, such as acute triangles, right-angled triangles and obtuse angles, is shown in Figure 4 (a), (b), and (c).
Fig. 3. Perpendicular segmentation of three kinds of triangles
1.The improved APIT algorithm is similar to the APIT algorithm. First, we need to know the information of all the beacon nodes around the target node, which includes the position of the beacon node and the signal strength of the beacon node receiving the target node.
2.All beacon nodes that can communicate with the target node form a beacon node set. We arbitrarily select three beacon nodes to form a triangle to determine wheth-er the target node is inside or outside the triangle. It is known that the three beacon nodes receive the signal strength of the target. When there is a point, the signal strength of the three beacon nodes received by the point is greater than or less than the signal strength received by the target node, then the target node is outside the triangle; otherwise, the target node is inside the triangle.
3.Select all the triangles that contain the target node, and divide the triangle into four or six parts with vertical lines. If the triangle is acute triangle, it can be divided into six small intervals. And if the triangle is a rectangular triangle or obtuse angle tri-angle, it can be divided into four small intervals. By comparing the signal strength by the target node received by the three beacon nodes, it can determine which sub-range the target node is located.
2.2 3D DV-Hop Localization Algorithm Based on Multicollinearity
3D DV-Hop localization algorithm. The DV-Hop localization algorithm as a dis-tance-independent localization algorithm, is proposed by Dragos Niculescu from University of Lotto, USA [22]. The optimal principle is that the unknown node first calculates the minimum hop count of the beacon node, then estimates the average distance per hop, and then multiplies the average hop ratio by the minimum number of hops, finally obtains the estimated distance between the unknown node and the beacon node [23]. The measurement method or the maximum likelihood estimation method can be used to calculate the coordinates of the unknown node.
Similar to the conventional DV-HOP algorithm, the 3D DV-Hop algorithm is also composed of three phases [24-26]. Firstly, the typical distance vector exchange proto-col is used to obtain all the nodes in the network to get the number of hops from the beacon nodes. In the second stage, after receiving the other beacon node position and the separated jump distance, the beacon node calculates the network average distance per hop, which is broadcast as a correction value to the network. And the correction value (average hop distance)
HopSize
iof the beacon node(
x y z
i, ,
i i)
is expressed as follows,(
) (
2) (
2)
2i j i j i j i j
i
i i j
x x y y z z
HopSize
h
!
!
" + " + "
=
#
#
(1)Where
(
x y z
i, ,
i i)
�(
x y z
j, ,
j j)
are the coordinates of the beacon nodes i and j.h
i is the hop count of beacon i and all other beacon nodes. When the unknown node obtains a Euclidean distance between four or more beacon nodes, it can enter the third stage, i.e., calculate the node position.In the third stage, the position estimation is usually performed using a multilateral measurement method or a maximum likelihood estimation method. Assume that
(
x y z
, ,
)
is the coordinates of an unknown node U, which measures the distance ofthe coordinates of the n beacon nodes. The coordinates of the i-th beacon node are
(
x y z
i, ,
i i)
, and the distance from node U to beacon node i is di. The formula of the calculation can be expressed as follows,(
) (
) (
)
(
) (
) (
)
(
) (
) (
)
2 2 2 2
1 1 1 1
2 2 2 2
2 2 2 2
2 2 2 2
,
4
n n n n
x x
y y
z z
d
x x
y y
z z
d n
x x
y y
z z
d
!
"
+
"
+
"
=
#
# "
+
"
+
"
=
$
%
#
# "
+
"
+
"
=
&
!
(2)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
1 1 1
2 2 2
1 1 1
2
n n n
n n n
n n n n n n
x x
y y
z z
x x
y
y
z z
A
x
!x
y
!y
z
!z
!
!
!
"
#
$
!
!
!
%
$
%
=
&
$
%
$
%
!
!
!
$
%
'
(
!
!
!
(3)2 2 2 2 2 2 2 2
1 1 1 1
2 2 2 2 2 2 2 2
2 2 2 2
2 2 2 2 2 2 2 2
1 1 1 1
n n n n
n n n n
n n n n n n n n
x
x
y
y
z
z
d
d
x
x
y
y
z
z
d
d
B
x
!x
y
!y
z
!z
d
d
!"
!
+
!
+
!
+
!
#
$
!
+
!
+
!
+
!
%
$
%
=
$
%
$
%
!
+
!
+
!
+
!
$
%
&
'
!
(4)[
]
TX
=
x y z
(5)When
A A
T is reversible, the equation can be obtained by ordinary least squares(OLS).
(
T)
1 TX = A A A B! (6)
From the 3D DV-Hop algorithm described above, it can be seen that
A A must be
T reversible when using OLS to solve the position of the node. When A AT =0or
A A
T!
0
, the matrix appears multiple collinearity, that is, the exact linearrela-tionship or approximation linear relarela-tionship are appeared in matrix
A
. Multicolline-arity consists of two types: complete multicollineMulticolline-arity and incomplete multiple collinearity. Its presence will have undesirable consequences for the final localization accuracy, and when there is a full multicollinearity, the variable measure will even fail. In the case of incomplete multi-collinearity, they are unstable and the variance of the parameter estimate becomes larger although the estimated values of the positions can be obtained. Then the degree of enlargement depends on the severity of the multi-ple collinearity. This paper will describe how to prevent this from happening in details, in the following sections.Three-dimensional topological analysis. The sensor nodes are often randomly distributed in practical applications, with considering other error caused by factors such as ranging and interference, so that the four beacon nodes are coplanar or ap-proximately coplanar, i.e.,
A A
T=
0
orA A
T!
0
, which leads to the failure of theFig. 4. Coplanar of beacon nodes in three-dimensional space
When
A A
T!
0
, although the estimated value of !X can be obtained, but theesti-mate is very unstable. The estiesti-mated position of the unknown node can be obtained with using the optimization method, which is at the cost of a higher computational complexity.The degree of multiple collinearity in the two-dimensional space is critical to the final overall localization accuracy of the nodes, and the degree of multiple col-linearity in the three-dimensional space is also extremely important [27]. In the two-dimensional space, the evaluation of the degree of multiple collinearity can been seen as the quality of the triangle constituted of the three beacon nodes. And the method has a variety of ways, such as the size of the triangle angle, the triangle three high school minimum, triangular inscribed circle radius and the ratio of the circumcircle radius. The degree of multiple collinearity of the four beacon nodes in the three-dimensional space can be evaluated by the mesh quality of the tetrahedron. The tetra-hedron can be considered as a triangular extension in space. The criteria for measuring tetrahedral mesh quality are different from judging triangular mesh quality standards, which has several metrics to determine the quality of triangles. A reasona-ble metric for tetrahedral mesh quality should meet the following principles: The translation, rotation, reflection, reflection, uniform scaling of the element should not change its metric; if and only if the tetrahedron is a tetrahedron, the value is maxi-mum; when the tetrahedral volume tends to zero, the measure is close to zero. People have put forward a variety of judgments and criteria to evaluate the quality of tetrahe-dron, respectively, as defined below,
1. The smallest solid angle
!
(
1 2 3 4)
min , , ,
!
=
! ! ! !
(7)(
)
(
)
1
0.5
2 2
2 4 1 1
12 sin
2
i j i j ij
V
l l l
!
" < "
# $ = % &
' ( + ) + , *
- .
/ 0 (8)
Where V is the volume of the tetrahedron consisting of vertices A, B, C, D, and
ij
l is the length of the edge connecting the vertices i and j. And
! ! !
2, ,
3 4 can be rotated through the index.2. Radius ratio !
3r R
!
=(9) In the formula, r R, are the radius of the tangent circle and the circumcircle in the tetrahedron, respectively. The formula for calculating the radius of the tangential sphere and the radius of the outer circle r and R are expressed as follows,
3 0 3 i i V r s = =
!
(10)(
)(
)(
)(
)
24
a b c a b c a c b b c a
R
V
+ +
+
!
+
!
+
!
=
(11) Where, V is the volume of the tetrahedron; s ii
(
=0,1,2,3)
is the i-th surface area; a, b, c are tetrahedral three groups of the edge of the product. The formula for calcu-lating the radius ratio " can be expressed as following,(
)(
)(
)(
)
2 3 0 216 i i Vs a b c a b c a c b b c a
!
= =
" + + + # + # + #
$
(12)Where the value range is 1#"> 0, when " $ 0 when the tetrahedron of the four fixed-point coplanarity, when " = 1 tetrahedron is into a tetrahedron.
3. Coefficient
Q
3 1 4 d ij i j
V
Q C
l
! < !
=
"
#
$
%
&
(
'
(13)Where Cd =1832.8202 is the scale factor used to obtain the maximum value of the
1.5 2
1 4
72 3
ij i j
V
l
!
" < " =
# $
% &
'
)
( (14)Considering the above approximation of several metric criteria and taking into ac-count the simplicity of the calculation, the radius ratio method is used to measure the degree of multiple collinearity of the four beacon nodes in the three-dimensional space. The multi-collinearity is measured with using a radius ratio, which is defined as follows,
0,|A A|=0
,| A A| 0
T
T
MC
!
"
=
#
$
%
(15)In the second stage of the DV-Hop algorithm, the beacon node calculates the aver-age per-hop distance after obtaining the distance and hops information from the adja-cent beacon points. In this paper, because the sum distance of the jumps replaces the actual distance, it may include the far nodes in the calculation of the average distance of each hop. Therefore, the error increases as the number of jumps increases. The distance between the unknown node and the beacon node unit is farther away from the third stage of the algorithm, and the smaller the localization effect is due to the multiple collinearity constraints, the greater the localization error is. Therefore, based on the 3D DV-Hop algorithm, two thresholds (multi-collinearity threshold thre_mc, hop threshold thre_hops) are added, and a three-dimensional DV-Hop localization algorithm based on multiple collinearities is proposed. The setting threshold of the hops limits the reception of packets greater than the threshold hops threshold, which ensures that all sensor nodes exchange information only with nodes in the threshold range during the localization process. Because the threshold of the hops can be preset, the data traffic can be reduced and the more energy can be saved, thus the service life of the nodes is prolonged. Therefore, the localization accuracy is improved. The multi-collinearity threshold ensures that only the best beacon nodes of the topology are selected in the localization algorithm.
1.Calculate the minimum number of hops for the unknown node and the beacon node within the defined hop count. The unknown node records the minimum number of hops received by the beacon node, while ignoring the larger number of hops from the same beacon node. When the unknown node receives the hop count value less than the threshold thre_hops, the node increases the hop value by l and forwards it to the neighbor node. Otherwise, the packet is discarded.
2.Calculate the distance between the unknown node and the beacon node within the defined hop count. Each beacon node uses the DV-Hop method to estimate the actual distance per hop based on the location information and the number of hops of the other beacon nodes. The unknown node records only the average dis-tance per hop for the first average disdis-tance or the number of jumps per hop, so that the unknown node can receive the average distance per hop from the nearest bea-con and calculate the hop count based on the number of beabea-con nodes within the hop distance
3.Use the node location method mentioned in the basic principle of node loca-tion to calculate its own posiloca-tion. First, the unknown node will calculate all its beacon nodes in four groups according to the set of MC, according to the set thre_mc excluded MC by discarding less than the reference point combinations with less than thre_mc, and then according to the multilateral measurement method to calculate the node coordinates, and finally take the average of all the results as the final position coordinates of the unknown node.
2.3 Blending of APIT and DV-Hop localization algorithms
Aiming at the above problems, the APIT algorithm is improved by combining with the DV-Hop algorithm. A hybrid localization algorithm based on APIT and DV-Hop is proposed. The flow chart of the algorithm is shown in Figure 5. When the PIT is used to determine whether the unknown node is inside the triangular region composed of any three beacon nodes, the judgment condition is added under the original APIT algorithm condition. The beacon nodes A, B, C and the unknown node M are obtained by the RSSI method, and then use the triangular cosine theorem to find the angle. If
Fig. 5. Flow chart of enhanced hybrid 3D localization algorithm based on APIT and DV-Hop
In the selection of fine triangles, remove the signal strength of the weak triangle, the selection principle is that: in the beacon node intensive, set a threshold P, and P is for the unknown node in the PIT point of all triangles 3 nodes of the signal strength and the average (The number of triangles is K), the left side of the inequality repre-sents the sum of the signal intensities of the three nodes of the current triangle, that is, the constraint condition is expressed as follows,
[ ]
[ ]
[ ]
(
)
[ ]
[ ]
[ ]
1
k
iA iB iC
i
A B C
P dB P dB P dB P
k
P dB P dB P dB P =
! + +
"" = # "
+ + >
"$
%
unknown nodes and two beacon nodes according to RSSI, and then the coordinates of the unknown node can be obtained according to the coordinates of these two beacons.
3
Experiments and analysis
This experiment is implemented in Matlab simulation platform, and the character-istics of the experimental model and its parameters are as follows:
1.Wireless sensor network coverage: 1000m % 1000m two-dimensional plane. 2.The network layout of 200 sensor nodes, beacon nodes and unknown nodes are
based on the experimental parameters, and each node is randomly distributed. Communication radius is 200m, and all nodes have the same communication, per-ception, storage capacity.
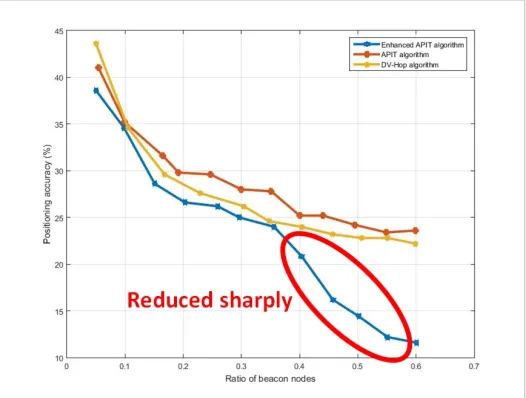
3.This environment is the ideal virtual environment without considering the external environment on the wireless signal in the propagation process without interference, and the wireless signal will only appear energy loss due to the transmission. According to localization precision comparison between APIT, enhanced APIT and DV-Hop algorithms , as shown in Figure 6, when the beacon node is sparse, the enhanced APIT algorithm has improved the localization accuracy of the APIT algo-rithm (ie, the triangulation of the PIT is reduced and the triangles are selected) (Below 3%). With the increase of beacon nodes, the localization accuracy improved obvious-ly (about 4% ~ 8%). Overall, the enhanced APIT algorithm has improved the localiza-tion accuracy. In addilocaliza-tion, the enhanced APIT algorithm can outperform all other algorithms, such as the APIT algorithm and the DV-Hop algorithm.
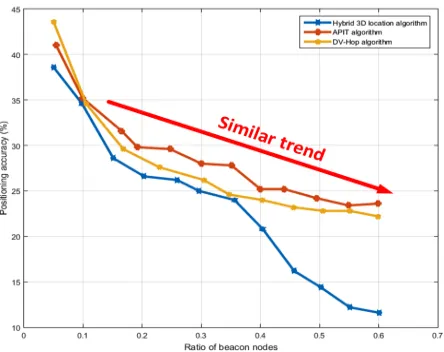
According to localization precision comparison between enhanced APIT, DV-Hop and hybrid 3D localization algorithms, as shown in Figure 7, when the beacon node is sparse, the localization accuracy is affected by the increase in the coverage of the hybrid algorithm. However, with the increase of the proportion of the beacon nodes, the localization accuracy of the hybrid 3D localization algorithm based on APIT and DV-Hop will increase in the beacon node dense environment. This is because the proposed enhanced hybrid 3D localization algorithm can improve the localization accuracy in the beacon node intensive environment with the specified structure. And with combining both the APIT and DV-Hop algorithms, the enhanced hybrid 3D localization algorithm is more robust to positioning the location of unknown nodes with high accuracy.
Fig. 7. Localization precision comparison between improved APIT, DV-Hop and hybrid 3D localization algorithms
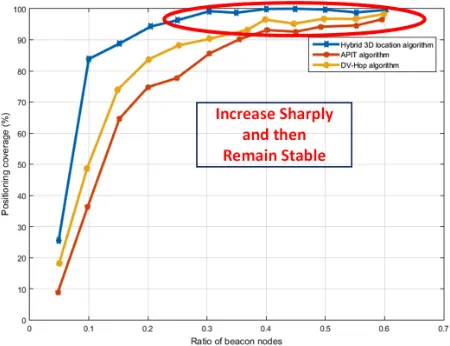
Fig. 8. Localization coverage comparisons between improved APIT, DV-Hop and hybrid 3D localization algorithms
In total, the proposed enhanced hybrid 3D localization algorithm can improves the localization accuracy of the beacon node in a dense environment by reducing the triangular miscarriage of the triangular interior point test (PIT) and selecting the ex-cellent triangles. In addition, combining with the DV-Hop algorithm and the two-In sparse environment, the advantages of unknown node coordinates can be calculated, and then the localization coverage of beacon nodes under sparse environment is also improved.
4
Conclusions
5
Acknowledgment
This work is supported by the University Natural Science Key Foundation of An-hui (No. KJ2017A453), the University Teaching Research Foundation of AnAn-hui (No. 2016 jyxm0693).
6
References
[1]Khan, Haroon, Muhammad Numan Hayat, and Zia Ur Rehman. "Wireless sensor networks free-range base localization schemes: A comprehensive survey." Communication, Compu-ting and Digital Systems (C-CODE), International Conference on. IEEE, 2017.
https://doi.org/10.1109/C-CODE.2017.7918918
[2]Shen, Shikai, et al. "An Improved Amorphous Localization Algorithm for Wireless Sensor Networks." Networking and Network Applications (NaNA), 2016 International Confer-ence on. IEEE, 2016. https://doi.org/10.1109/NaNA.2016.76
[3]Das, Banee Bandana, and Saswat Kumar Ram. "Localization using beacon in wireless sen-sor networks to detect faulty nodes and accuracy improvement through DV-Hop algo-rithm." Inventive Computation Technologies (ICICT), International Conference on. Vol. 1. IEEE, 2016.
[4]Prashar, Deepak, Kiran Jyoti, and Dilip Kumar. "A comparison of distributed range free localization algorithms in wireless sensor networks." Indian Journal of Science and Tech-nology 9.28 (2016).
[5]Tomic, Stefan, and Ivan Mezei. "Improvements of DV-Hop localization algorithm for wireless sensor networks." Telecommunication Systems 61.1 (2016): 93-106.
https://doi.org/10.1007/s11235-015-0014-9
[6]Yang, Xi, Fang Yan, and Jun Liu. "3D Localization Algorithm Based on Voronoi Diagram and Rank Sequence in Wireless Sensor Network." Scientific Programming 2017 (2017).
https://doi.org/10.1155/2017/4769710
[7]Hu, Tang Ming, Zhang Chang Hong, and ZAN Feng Biao. "APIT localization algorithm in wireless sensor networks [J]." Microcomputer & Its Applications 21 (2010): 003.
[8]Xie, Hao, et al. "An improved DV-Hop localization algorithm based on RSSI auxiliary ranging." Control Conference (CCC), 2016 35th Chinese. IEEE, 2016.
https://doi.org/10.1109/ChiCC.2016.7554681
[9]Feng, Xiufang, Xiufeng CUI, and Huibo QI. "A modified localization algorithm of APIT based on mobile beacon node for wireless sensor network." Chinese Journal of Sensors and Actuators 2 (2011): 023.
[10]Liu, Jilong, et al. "VN-APIT: virtual nodes-based range-free APIT localization scheme for WSN." Wireless Networks 22.3 (2016): 867-878. https://doi.org/10.1007/s11276-015-1007-z
[11]Zhang, Lieping, et al. "An Improved Three-dimensional DV-Hop Localization Algorithm Optimized by Adaptive Cuckoo Search Algorithm." International Journal of Online Engi-neering 13.2 (2017).
[12]Shahzad, Farrukh, Tarek Shaltami, and Elhadi Shakshukhi. "DV-maxHop: A Fast and Ac-curate Range-Free Localization Algorithm for Anisotropic Wireless Networks." IEEE Transactions on Mobile Computing (2016).
[13]Sharma, Gaurav, and Ashok Kumar. "Improved DV-Hop localization algorithm using teaching learning based optimization for wireless sensor networks." Telecommunication Systems (2017): 1-16. https://doi.org/10.1007/s11235-017-0328-x
[15]Cheng, WenHua, Jia Li, and Huaizhong Li. "An improved APIT location algorithm for wireless sensor networks." Advances in electrical engineering and automation. Springer Berlin Heidelberg, 2012. 113-119.
[16]Zhou, Yong, Xin Ao, and Shixiong Xia. "An improved APIT node self-localization algo-rithm in WSN." Intelligent Control and Automation, 2008. WCICA 2008. 7th World Con-gress on. IEEE, 2008.
[17]Yang, Hua, et al. "A Three-Dimensional Localization Algorithm Based on DV-Hop in Wireless Sensor Networks." China Conference on Wireless Sensor Networks. Springer, Berlin, Heidelberg, 2014.
[18]Lamiaa Elsayed, Ahmed M.Khedr1, Ismail Amr, " A New 3 dimensional TOADV -Hop Localization Algorithm" , Egyptian Computer Science Journal, 2015.
[19]He, Tian, et al. "Range-free localization schemes for large scale sensor networks." Pro-ceedings of the 9th annual international conference on Mobile computing and networking. ACM, 2003. https://doi.org/10.1145/938985.938995
[20]Boukerche, Azzedine, et al. "Localization systems for wireless sensor networks." IEEE wireless Communications 14.6 (2007).
[21]Han, Guangjie, et al. "Localization algorithms of wireless sensor networks: a survey." Tel-ecommunication Systems (2013): 1-18. https://doi.org/10.1007/s11235-011-9564-7
[22]Chen, Hongyang, et al. "An improved DV-Hop localization algorithm for wireless sensor networks." Industrial Electronics and Applications, 2008. ICIEA 2008. 3rd IEEE Confer-ence on. IEEE, 2008.
[23]Zeng Wang, Ji, and Hongxu Jin. "Improvement on APIT localization algorithms for wire-less sensor networks." Networks Security, Wirewire-less Communications and Trusted Compu-ting, 2009. NSWCTC'09. International Conference on. Vol. 1. IEEE, 2009.
[24]Yang, Ji, and Feng Liu. "A modified localization algorithm of apit based on perpendicular bisector feature for wireless sensor network." Chinese Journal of Sensors and Actuators 21.8 (2008): 1453-1457.
[25]Mohamed, Enas, Hatem Zakaria, and M. B. Abdelhalim. "An Improved DV-Hop Localiza-tion Algorithm." InternaLocaliza-tional Conference on Advanced Intelligent Systems and Informat-ics. Springer International Publishing, 2016.
[26]Wang, Jia, and Fu Jingqi. "Research on APIT and Monte Carlo method of localization al-gorithm for wireless sensor networks." Life System Modeling and Intelligent Computing. Springer Berlin Heidelberg, 2010. 128-137.
[27]Yong, Zhou, et al. "An improved APIT node self-localization algorithm in WSN based on triangle-center scan." Journal of Computer Research and Development 46.4 (2009): 566-574.
7
Authors
Lianjun Yi (corresponding author) is with the Science and Technology College GanNan Normal University, Ganzhou, Jiangxi 341000, P.R. China (e-mail: [email protected])
Miaochao Chen is with the School of Applied Mathematics, Chaohu University, Hefei, 238000, P.R. China.