and education use, including for instruction at the authors institution
and sharing with colleagues.
Other uses, including reproduction and distribution, or selling or
licensing copies, or posting to personal, institutional or third party
websites are prohibited.
In most cases authors are permitted to post their version of the
article (e.g. in Word or Tex form) to their personal website or
institutional repository. Authors requiring further information
regarding Elsevier’s archiving and manuscript policies are
encouraged to visit:
ContentslistsavailableatSciVerseScienceDirect
Electric
Power
Systems
Research
j o ur na l ho me p ag e :w w w . e l s e v i e r . c o m / l o c a t e / e p s r
Experiments
with
the
interior-point
method
for
solving
large
scale
Optimal
Power
Flow
problems
Florin
Capitanescu
a,∗,
Louis
Wehenkel
baUniversityofLuxembourg,InterdisciplinaryCentreforSecurity,ReliabilityandTrust(SnT),6,rueRichardCoudenhove-Kalergi,L-1359Luxembourg,Luxembourg bUniversityofLiège,InstitutMontefiore,Sart-TilmanB28,B-4000Liège,Belgium
a
r
t
i
c
l
e
i
n
f
o
Articlehistory: Received16March2012 Receivedinrevisedform 17September2012 Accepted1October2012 Keywords:
OptimalPowerFlow
Security-ConstrainedOptimalPowerFlow Interior-pointmethod
Nonlinearprogramming
a
b
s
t
r
a
c
t
Thispaperreportsextensiveresultsobtainedwiththeinterior-pointmethod(IPM)fornonlinear pro-grammes(NLPs)stemmingfromlarge-scaleandseverelyconstrainedclassicalOptimalPowerFlow(OPF) andSecurity-ConstrainedOptimalPowerFlow(SCOPF)problems.Thepaperdiscussestransparentlythe problemsencounteredsuchasconvergencereliabilityandspeedissuesofthemethod.
© 2012 Elsevier B.V. All rights reserved.
1. Introduction
TheOptimalPowerFlow(OPF)[1]isastatic,nonlinear, non-convex,large-scale optimization problem withcontinuous and discretevariables.TheSecurity-ConstrainedOptimalPowerFlow (SCOPF)isageneralizationoftheOPFproblemthatensures addi-tionallythesystemsecuritywithrespecttoa setofpostulated contingencies[2].OPFisnowadaysanessentialtoolinpower sys-temsplanning,operationalplanningandreal-timeoperation.
Due to critical environmentalissues, nowadays mostpower systemshavetoaccommodatea significantlevel ofpenetration ofrenewableintermittentgeneration.Thisrequiressmarterways ofcontrolinreal-time accordingtotheprinciples:just-in-time, just-in-place,andjust-in-context[3].Sinceaclassicalday-ahead preventiveSCOPFapproachwouldbenotanymoresustainable,we foreseethattheneedforusinganautomaticadaptiveoptimal con-trolscheme,andinparticulara(SC)OPFinreal-time,ismoreand morestringent.Thisraisesthesameoldconcernsregardingmostly thereliabilityandspeedofsuchanapproach[4,5].Furthermore, inEuropethereisatrendtocheckthesecurityandpropose coor-dinatedcontrolactionsforalargeinterconnection,composedby independentpowersystems,inabroaderway[6],whichcallsfor
∗Correspondingauthor.Tel.:+3524666445345;fax:+3524666445669. E-mailaddresses:fl[email protected](F.Capitanescu),
[email protected](L.Wehenkel).
toolsabletodealwithverylargescaleoptimizationproblems,with uptohundredsofmillionsofvariablesandconstraints.
IPM[7,8]hasbeensuccessfullyappliedfornearlytwodecades tovariousOPFproblems[9–13].ThemainadvantagesoftheIPM are:(i)easeofhandlinginequalityconstraintsbylogarithmic bar-rierfunctions,(ii)speedofconvergence,and(iii)astrictlyfeasible initialpointisnotrequired.ThedrawbacksoftheIPMare:(i)the heuristictodecreasethebarrierparameter,(ii)therequired pos-itivityofslackvariablesandtheircorrespondingdualvariablesat everyiteration(whichmaydrasticallyshortentheNewtonstep length),and(iii)itdoesnotwarmstartwell.
Confidentiality of large scale real-life power systems data deprivesthepowersystemscommunityofrealisticbenchmarks atleastinthefieldofOPFandpreventsresearchersfrom repor-tingOPFresultsobtainedinrealisticconditionsandtherebythe fairassessmentofexistingOPFmethodsonvariousdifferent prob-lems.Untilrecently,whenalarge2746-busmodelofthePolish powersystembecamefreelyavailable[14],thelargesttestbedfor theOPF/SCOPFprogramswasanIEEEsystemof300buses[15].
Thelarge-scale1NLPOPFproblemstackledbyIPMreportedin theliteratureinvolvepowersystemsof2098buses[16,17],2256 buses[18,19],2423buses[9],2746buses[20],2935buses[21], 3012buses[22],and3467buses[10].Otheralternativealgorithms havebeenalsousedforlarge-scaleOPF,e.g.Newtonmethodwas
1Wearbitrarilyconsiderapowersystemas“large”ifitcontainsmorethan2000
buses. 0378-7796/$–seefrontmatter© 2012 Elsevier B.V. All rights reserved.
appliedtoa2436-busgrid[23],anon-interiorpoint complemen-taritymethodwasappliedtoa2098-bussystem[16,24],amodified barrierLagrangianfunctionwasappliedtoa2111-bussystem[25], a modifiedbarrier approach wasappliedtoa 2256-bus system [26],andatrust-regionbasedaugmentedLagrangianmethodwas appliedtonetworkmodelsof2935buses[21]and3012buses[22]. Furthermore,althoughseveralcommercialNLP SCOPFpackages areavailablefromvariousvendors[27–29],andareroutinelyused bymanysystemoperators,thescientific literaturereportingon experimentsusingSCOPFsolversonlarge-scalesystemsisquite limitedexceptofthefollowingworks:[30]usesanSLPapproach foramodelof12,965buses,[29]reliesonaninterior-pointsolver fora2351-busnetwork,[31]employsaconicprogrammingfora 2383-busPolishsystem,[32]reliesontheIPMfora2746-busPolish system,[22]appliesIPMtoa3012-busgrid,[33]usesaSLPforthe 3551busesUKsystem,and[34]usesamethodcombiningIPMand conjugategradientfora15,000busEuropeansystem.
Motivatedbythefactthattheseworkspresentgenerallyonly oneexampleofa successfulapplicationofa givenalgorithmto agivenOPF/SCOPFproblem,themaincontributionofthispaper liesin thetransparent report of extensiveresults with a non-commercialIPM-basedOPFprogram,developedbytheauthorsfor researchpurposes[35],onseverelyconstrainedlarge-scaleOPFand SCOPFproblems.Thechallengesofthesecomputationsarerelated to:(i)thesizeofour8387-bussystem,whichmodelsalargepartof Europe,isroughlythreetimeslargerthanpreviouslyreported IPM-basedNLPOPFs,(ii)thecomplexityofdata(e.g.coexistenceofmany verylonglines,stemmingfromsomenetworkequivalents,andvery shortlines),(iii)thetoughnessoftheoptimizationproblems con-sideredcomparedtotheliterature(e.g.oftenmorethanthousand constraintsarebindingattheoptimum),and(iv)thenumberand varietyofcontrolvariables(e.g.fewthousandscontrolvariables forthecontrolofbothactiveandreactivepowersareconsidered together).Thepaperalsodiscussesinatransparentwayreliability andspeedissuesoftheIPM.
Thepaperisorganizedasfollows.Section2introducestheOPF problemswhileSection3brieflydescribestheinterior-point algo-rithmusedforsolvingthem.Section4providesnumericalresults obtainedwiththeIPMforseveralOPFandSCOPFproblems.Section 5concludes.
2. FormulationoftheOptimalPowerFlowproblem
For the sake of facilitating the reader’ interpretation of our resultsaswellastomakethepaperself-containedwedescribe inthissectiontheformulationoftwoclassicalOPFproblems.
2.1. Notations
Letusdenoteby:n,g,c,b,l,t,o,a,andstherespective num-bersof:buses(n),generators(g),loads(c),branches(b),lines(l), alltransformers(t),transformerswithcontrollabletaps(o),phase shifters(a),andshuntelements(s),respectively.
We formulate the OPF problem with complex voltages expressedinrectangularcoordinates[12,35]:
Vi=ei+jfi, i=1,...,n,
whereeiandfiareitsrealandimaginarypart,respectively,the
voltagemagnitudebeing:
Vi=
e2 i +f 2 i .G
sk1
:
r
kB
skG
kB
skj
i
B
kG
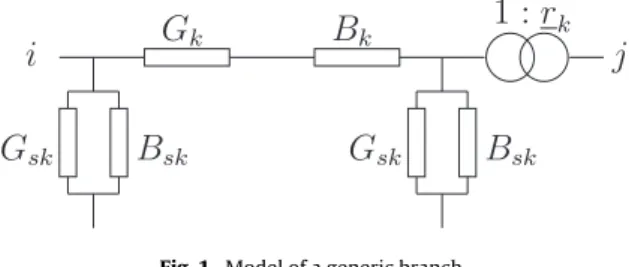
sk Fig.1.Modelofagenericbranch.Wemodelanybranchk asasymmetricalquadruplein in serieswithanidealtransformerwithcomplexratio1/rk(seeFig.1), where:
rk=rk1+jrk2, k=1,...,b, rk2=rk21+rk22, k=1,...,b.
Atransformerwithtap-changerisaparticularcasewhererk2=0 whilealineisaparticularcasewhererk1=1andrk2=0.
2.2. Objectivefunctions
Inthispaperwedealwithtwoclassicalobjectivesnamely min-imumgenerationdeviationwithrespecttothebasecase(MD): MD=min g
i=1 (Pgi−Pgi0) 2, (1)andminimumactivepowerlosses(MPL): MPL=min b
k=1 GskV2 i +Gsk V2 j r2 k +Gk Vi2+V 2 j r2 k −2rk1(eiej+fifj)+rk2(eifj−fiej) r2 k , (2) wherePgiandPgi0 istheactivepowerandbasecaseactivepowerofgeneratori,Gk(respectivelyGsk)istheconductance(respectively
halfshuntconductance)ofthebranchklinkingbusesiandj. 2.3. Controlvariables
Weconsiderthefollowingcontrolvariables:generatoractive power,generatorreactivepower,controllabletransformerratio, shuntreactanceandphaseshifterangle.
2.4. Equalityconstraints
Equalityconstraintsmainlyinvolvenodalactiveandreactive powerbalanceequations,which,fortheithbus(i=1,...,n),take ontheform: Pgi−Pci−(e2i+f 2 i)
k∈Bi (Gsk+Gk) + k∈Bi [(eiejk+fifjk)(rk1Gk+rk2Bk)−(fiejk−eifjk)(rk2Gk−rk1Bk)]=0, (3) Qgi−Qci+(ei2+fi2)[Bsi+ k∈Bi (Bsk+Bk)] + k∈Bi [(eiejk+fifjk)(rk2Gk−rk1Bk)+(fiejk−eifjk)(rk1Gk+rk2Bk)=0, (4)wherePgiandQgiaretheactiveandreactivepowersofthegenerator
connectedatbusi,PciandQciaretheactiveandreactivedemandsof
theloadconnectedatbusi,Bsiistheshuntsusceptanceconnectedat
busi,Bidenotesthesetofbranchesconnectedtobusi(and
∀
k∈Bi, jkdenotestheotherbustowhichbranchkisconnected),GkandBk(respectivelyGskandBsk)arethelongitudinal(respectivelyshunt)
conductanceandsusceptanceofthekthbranchconnectedtobusi. Additionalequalityconstraintsmayexist,asfor examplethe settingofaphaseshifterratiotoaspecifiedreferencerk0: r2
k1+rk22−rk20=0, k=1,...,a, (5) orthesettingofgeneratorvoltagetoaspecifiedreference: e2i+fi2−(Viref)2=0, i=1,...,g. (6) 2.5. Inequalityconstraints
Theoperationallimitson(longitudinal)branchescurrentand voltagesmagnitudetakeontheform:
(G2 k+B2k) V2 i + V2 j r2 k −2rk1(eiej+fifj)+rk2(eifj−fiej) r2 k ≤Ikmax, k=1,...,b (7) (Vmin i ) 2≤e2 i +fi2≤(Vimax) 2, i=1,...,n. (8) Physicallimitsofpowersystemdevicescanbeexpressedas: Pmin gi ≤Pgi≤Pgimax, i=1,...,g, (9) Qmin gi ≤Qgi≤Qgimax, i=1,...,g, (10) r1mini ≤r1i≤r1maxi , i=1,...,o, (11) Bmin i ≤Bsi≤Bmaxi , i=1,...,s, (12) tanimin≤r2i r1i ≤ tanmaxi , i=1,...,a, (13)wherefortheithgeneratorPmin gi ,P max gi (respectivelyQ min gi ,Q max gi )are itsactive(respectivelyreactive)outputlimits,fortheith control-labletransformerrmin
1i andr1maxi areboundsonitsratio,fortheith shuntBmin
i andB max
i areboundsonitssusceptance,andfortheith phaseshiftermin
i and
max
i areboundonitsangle.
3. Multiplecentralitycorrectionsinterior-pointalgorithm WesolvetheaboveOPFproblemsusingthemultiple central-itycorrections(MCC)interior-pointalgorithm[17,35,36],thatthe authorsfoundafterextensiveexperimentsovertheyearsasthe mostreliable IPM algorithm. In order to make the paper self-containedwe brieflydescribethisalgorithminthis sectionand refer the interested reader to [35] for further implementation details.
3.1. OptimalityconditionsintheIPM
TheOPFformulationsoftheprevioussectioncanbecompactly writtenasageneralnonlinearprogrammingproblem:
minf(x), (14)
s.t. g(x)=0, (15)
h(x)≥0, (16)
wheref(x),g(x)and h(x)areassumedtobetwicecontinuously differentiable,xisa(dim(C)+2n)-dimensionalvectorthat encom-passes both control variables (vectorof size dim(C)) and state variables(realandimaginarypartofvoltageatallbuses),gisa p-dimensionalvectoroffunctionsandhisaq-dimensionalvector offunctions.
TheLagrangianassociatedwiththisNLPproblemwithintheIP frameworkcanbedefinedas:
L(y)=f(x)− q
i=1
lnsi−Tg(x)−T[h(x)−s],
wheres=[s1,...,sq]Tisthevectorofslackvariables,andare
thevectorsofLagrangemultipliers(alsocalleddualvariables),is apositivescalarcalledbarrierparameter,andy=[sx]Tgroups
allvariables.
TheperturbedKKTfirstordernecessaryoptimalityconditions areobtainedbysettingtozerothederivativesoftheLagrangian withrespecttoallunknowns[8]:
⎡
⎢
⎢
⎢
⎢
⎣
∇
sL(y)∇
L(y)∇
L(y)∇
xL(y)⎤
⎥
⎥
⎥
⎥
⎦
=⎡
⎢
⎢
⎣
−e+S −h(x)+s −g(x)∇
f(x)−Jg(x)T−Jh(x)T⎤
⎥
⎥
⎦
=0, (17)whereSisadiagonalmatrixofslackvariables,e=[1,...,1]T,
∇
f(x)isthegradientof f,Jg(x)istheJacobianof g(x)andJh(x)isthe Jacobianofh(x).Notethatinordertofacilitatethepresentation wehaverewrittenthecomplementarityslacknessconstraintsas e+S=0butaproperimplementationshouldrelyonthe con-straints/s+=0soastopreservethesymmetryoftheHessian.
Thepureprimal-dualIPalgorithmconsistsinsolvingiteratively thelinearizedKKTconditionsfortheNewtondirectionykwhile
decreasingthebarrierparameterkgraduallytozeroasiterations
progress: H(yk)
⎡
⎢
⎢
⎢
⎢
⎣
sk k k xk⎤
⎥
⎥
⎥
⎥
⎦
=⎡
⎢
⎢
⎢
⎢
⎣
ke−Skk h(xk)−sk g(xk) −∇
f(xk)+J g(xk)Tk+Jh(xk)Tk⎤
⎥
⎥
⎥
⎥
⎦
(18)where H(yk) is the Hessian matrix (of second derivatives)
(
∂
2L(yk)/
∂
y2).Wedenotebydim(KKT)thesizeofthisHessian.3.2. TheMCCalgorithm
WebrieflyoutlinetheMCCalgorithmtosolvetheKKT optimal-ityconditions(17):
I.Initialization.
Settheiterationcountk=0.Chose0>0.Initializey0,taking carethatslackvariablesandtheircorrespondingdualvariables arestrictlypositive(s0,0)>0.
II.Thepredictorstep.
(a) Solve the system (18) for the affine-scaling direction, obtainedbyneglectinginitsright-handside:
H(yk)
⎡
⎢
⎢
⎢
⎢
⎣
sk af k af k af xk af⎤
⎥
⎥
⎥
⎥
⎦
=⎡
⎢
⎢
⎢
⎢
⎣
−Skk h(xk)−sk g(xk) −∇
f(xk)+J g(xk)Tk+Jh(xk)Tk⎤
⎥
⎥
⎥
⎥
⎦
(b) Computetheaffinecomplementaritygapk af: kaf=(sk+˛kafskaf)T(k+˛k af k af) where˛k
af∈(0,1]isthesteplengthwhichwouldbetaken alongtheaffinescalingdirectionifthelatterwasused(19). (c)Estimatethebarrierparameterforthenextiteration:
k af=min
⎧
⎨
⎩
k af k2
,0.2⎫
⎬
⎭
k af qwherek=(sk)Tkdenotesthecomplementaritygapatthe
currentiterate. IIIThecorrectorstep.
(a) Compute a trial2 point ˜yk=yk+˛˜kyk
af, where ˛˜ k= min(˛k
af+ı˛,1)withthedesiredimprovementonthestep lengthı˛=0.2.
(b) Computethecomplementarityproductsatthetrialpoint ˜
vk=S˜k˜k.
(c)Identifycomponentsof ˜vkthatdonotbelongtotheinterval [ˇminkaf,ˇmaxkaf], calledoutliercomplementarity prod-ucts,whereˇmin=0.1andˇmax=10.
(d)Because the corrector step effort focuses on correcting theoutliersonlyinordertoimprovethecentralityofthe nextiterate,sometargetcomplementaryproducts(˜vk)tare defined: (
v
k i) t=⎧
⎪
⎪
⎨
⎪
⎪
⎩
ˇminkaf, if ˜v
ik<ˇminkaf ˇmaxkaf, ifv
˜ik>ˇmaxkaf ˜v
ik, otherwise (e)Thecorrectordirectionykcoisobtainedasthesolutionof thefollowinglinearsystem:
H(yk)
⎡
⎢
⎢
⎢
⎢
⎣
sk co k co k co xk co⎤
⎥
⎥
⎥
⎥
⎦
=⎡
⎢
⎢
⎢
⎣
(vk)t −v˜k 0 0 0⎤
⎥
⎥
⎥
⎦
wherethenonzerocomponentsoftheright-hand-side cor-respondtotheoutliercomplementarityproductsonly. (f)Update3thenewsearchdirection:
yk=ykaf+ykco (g)Choiceofthesteplength.
Determinethemaximumsteplength˛k
p∈(0,1] (respec-tively˛k
d∈(0,1])intheprimal(respectivelydual)variables spacealongtheNewtondirectionyk suchthat sk+1>0 (respectivelyk+1>0): ˛k p=min
1,min sk i<0 −sk i sk i ˛k d=min 1, min k i<0 −k i k i (19) where∈(0,1)isasafetyfactoraimingtoensurestrict positivenessofslackvariablesandtheircorrespondingdual variables.Atypicalvalueofthesafetyfactoris=0.99995. (h)Updatesolution: sk+1=sk+˛k psk k+1=k+˛kdk xk+1=xk+˛k pxk k+1=k+˛kd k2 Notethatatthispointsomeslackvariablesand/ortheircorrespondingdual
variablesmayviolatethestrictpositivityconditions(sk,k)>0.
3 Thecorrectorstepcanbeappliedseveraltimes.Insuchacase,thecurrent
directionykbecomesthepredictorforanewcorrector.
Table1
Testsystemsummary.
n g c b l t o a s
8387 1865 4669 14,561 12,474 2087 589 84 178
(i)Repeatthecorrectorstepapre-definednumberoftimesas longastheimprovementinthesteplengthissatisfactory butinferiorto1.
(IV) Checkconvergence.
A(locally)optimalsolutionisfoundandtheoptimization processterminateswhen:primalfeasibility,scaleddual fea-sibility,scaledcomplementarity gapandobjective function variationfromaniteration tothenextfallbelowsome tol-erances[9,10,12]: max{max i {−hi(x k)},||g(xk)|| ∞}≤ 1 (20) ||
∇
f(xk)−J g(xk)T−Jh(xk)Tk||∞ 1+||xk||2+||k||2+||k||2 ≤ 1 (21) k 1+||xk||2 ≤ 2 (22) |f(xk)−f(xk−1)| 1+|f(xk)| ≤ 2 (23)whereusually 1=10−4and 2=10−6.
Ifconvergencewasnotachievedsetk←k+1andgotostep II.
4. Numericalresults
4.1. Descriptionofthepowersystemmodel
Weusea8387-busmodifiedmodel4oftheinterconnectedEHV EuropeanpowersystemwhichspansfromPortugalandSpainto Ukraine, Russia and Greece. Notice that in this model the real parametersoftheindividualpowersystemcomponents(e.g.lines, transformers,etc.),thenetworktopology,aswellasthelimitson generators active/reactivepowers,transformers ratioandangle, voltages,andbranchcurrentshavebeenbiased.Nevertheless,this modelisrepresentativefortheEuropeaninterconnectioninterms ofsystemsizeandcomplexity.
Inordertoassesstherobustnessofourtoolwehavechosenvery tightoperationallimitsandphysicalboundsovercontrols.Asa con-sequencethebasecaseisquiteconstrained,e.g.manygenerators havenarrowphysicalactive/reactivepowerlimits,manyvoltage limitsareverytight,theanglerangeofseveralphaseshiftersisvery small,6linesareloadedatmorethan90%,etc.Thesedatacontain manyveryshortlines(e.g.98lineshavetheirreactancelowerthan 0.0002pu)andmanyartificiallines,stemmingfromsomenetwork equivalents,withverylargeimpedancevalues,whichleadto rel-ativelyill-conditionedproblems.Forinstanceforthisdatasetthe ratiobetweenthemaximumimpedanceandminimumimpedance overallbranchesisaround408,854,whilefortheIEEE118 sys-tem[15](respectivelythePoland2746-busmodel[14])thisratio isaround51(respectively15,516).Inaddition,thisdataset con-tains743brancheswithalargerratiothanthemaximumratioof thePoland2746-busmodel.
Asummaryofthecharacteristicsofthistestsystemsisgivenin Table1.
4Morecomprehensivedatasetsofthissystemareavailableuponrequestfrom
Table2
Problemsdefinition.
Problem Basecase Obj. Controlvariables Inequalityconstraints
Pg Pgs Vg r1 Bs a Pg Pgs Qg r1 Bs a V I P1 A MPL × × × × P2 A MPL × × × × × × × × × P3 A MPL × × × × × × × × × × P4 A MD × × × × P5 A MD × × × × × P6 A MD × × × × × × × × × P7 A MD × × × × × × × × × × × P8 A MD × × × × × × × × × × P9 A MD × × × × × × × × × × × × P10 B MD × × × × × × P11 B MD × × × × × × × × × × P12 B MD × × × × × × × × × × × × 4.2. Simulationassumptions
Weconsiderin oursimulationstwobasecasesdenotedasA
andB.InthebasecaseAsomevoltagelimitsarenotmet.Thebase caseBisthesameasAexceptthattheflowlimitofalinehasbeen decreasedtocreateathermalcongestion.
Unlessotherwisespecified,weusethedefaultsettingsofthe MCCalgorithm[35]inallcomputationstoenableafairassessment oftheperformancesofthealgorithm.
AlltestshavebeenperformedonaPCof2.8-GHzand4-GBRAM, usingtheIPM-basedNLPOPFprogram,developedforresearch pur-posesbytheauthorsinC++withintheCygwinenvironment[35]. 4.3. OPFproblemsdefinition
InordertotesttherobustnessandefficiencyoftheIPM,several OPFproblemshavebeensolvedinvolvingdifferentcombinations ofobjectives,controlsandconstraints,asshowninTable2.Inthis tablePg,Psg,Vg,Qg,r1,Bs,a,I,andVrefertogeneratoractivepower,
slackgeneratoractivepower,generatorterminalvoltage,generator reactivepower,controllabletransformerratio,shuntsusceptance, phaseshifterangle,branchcurrent,andbusvoltagemagnitude, respectively,whilesymbol“×”meansthatthevariable/constraint isconsideredintheOPF.
In allproblems the equality constraintsare the power-flow equationsandsometimesphaseshifterangles(e.g.inP7,P9,and P12)andgeneratorsvoltages(e.g.inP4toP7).
4.4. ObservationsabouttheOPFresults
Table 3 provides for each problem the size dim(C) of the setofcontrol variables,thesize dim(KKT)ofthe fullsystemof KKToptimalityconstraints(17),andthenumberofiterationsto
Table3
Problemssizeandconvergencedetails.
Problem dim(C) dim(KKT) Iter. Time(s)
P1 1825 76,221 43 16.0 P2 2592 80,056 45 16.8 P3 2592 105,004 65 47.4 P4 1250 72,204 9 5.0 P5 1250 105,752 10 8.1 P6 2017 109,587 14 10.7 P7 2185 110,175 13 10.0 P8 4413 114,109 9 8.3 P9 4581 114,697 9 7.2 P10 3646 110,274 17 12.1 P11 4413 114,109 14 10.6 P12 4581 114,697 16 50.8 Table4
NumberandtypeofactiveconstraintsforproblemP3.
Activeconstraints Total
Qg I V r1 Bs
330 18 1064 83 63 1558
convergenceaswellasthecorrespondingCPUtimes5(inseconds). Furthermore,ingeneralthelargerthenumberofactiveconstraints thelargerthenumberofiterationstoconvergenceandhencethe computationaltime.Noticethattheconvergenceisachievedwithin areasonableCPUtimeforallproblemsinspiteofthelargesizeof thesystemandallthecomputationalchallengesmentioned pre-viously.Theaveragecomputationaleffortperiterationgenerally increaseswiththeproblemsizewhiletheoverallcomputingtime seemstoberathermoreinfluencedbytheproblemsizethanbythe numberofcontrolvariables.
Table4showsthenumberandthetypeofactiveconstraintsat theoptimumofproblemP3.
Theverylargenumberof1558activeconstraintsconfirmsthe extremedifficultyoftheproblem.Thealgorithm’sabilityto effec-tivelycoordinate 18activelinecurrentconstraints(and3other linesloadedabove96%)togetherwith1064Vlimitsisremarkable. NoticethatmostNLPOPFtestscenariosoftheliterature,andin particularforIPM-basedOPFs,rarelyhavemorethanafewactive line-currentconstraintsanda fewhundredofotheractive con-straints(seehowever[30],aworkonSLP-basedSCOPF,where23 linecurrentconstraintsareactive).
4.5. OPFfailureonaverytoughproblem
WenowfocusonproblemP8butminimizetheoverallactive powergenerationandhencereplacethequadraticobjective(1)by thelinearone:
L=min g
i=1
Pgi. (24)
ForthisproblemtheMCCalgorithmgetsstuckonaninfeasible non-optimalpoint.Furthermore,theconvergenceisnotrestored even after trying few classical heuristic techniques (e.g. differ-entinitialvaluesfor thebarrierparameter,smallervalues of thesafetyparameter,anddifferentinitializationsofvariables) [16,40].However, by using anotherIPM algorithm, namelythe predictor–corrector(thatwegenerallyfoundslightlylessreliable thantheMCCalgorithm)alocallyoptimalsolutionisfound.Table5
Table5
NumberandtypeofactiveconstraintsforthemodifiedproblemP8.
Activeconstraints Total
Pg Qg I V r1 Bs
828 379 76 510 58 80 1931
Table6
SCOPFstatisticsforproblemP2.
Numbercontingencies dim(C) dim(KKT) Iter. Time(s)
0 2592 80,056 45 16.8
1 4417 158,101 53 78.5
2 6242 236,146 55 155.0
3 8067 314,191 75 389.0
Table7
SCOPFstatisticsforproblemP8.
Numbercontingencies dim(C) dim(KKT) Iter. Time(s)
0 4413 114,109 9 8.3
1 6238 217,100 10 30.2
2 8063 320,091 15 93.0
3 9888 423,082 11 140.9
4 11,713 526,673 10 204.3
providesthenumberandthetypeofactiveconstraintsatthis opti-mum.Thechoiceofthislinearobjectiveleads,asexpected,toa highnumberofactivepowergeneratorconstraintsactiveatthe optimum.Theverylargetotalnumberof1931activeconstraints, aswellasthelargenumberof76activebranchcurrentconstraints (plus11linesloadedabove95%attheoptimum),indicateagainthe toughnessofthistestscenarioascomparedwiththosefromthe literature.
4.6. SCOPFsolutions
InordertofurtherassesshowtheIPMscaleswithproblemsize
weconsidertheproblems P2andP8solvedbya SCOPFin
pre-ventiveonlymode[2].Thelatterconsistsinduplicatingbasecase constraints(3)–(13)foreachcontingencyincludedintheSCOPF andassumesthatcontrolvariableshavethesamevalueinboth basecaseandcontingencystates.ThisSCOPFisaugmentedwith onecontingencyatthetime.
Tables 6and 7provide for eachproblemthe sizeof theset ofcontrolvariables,thesizeofthefullsystemofKKToptimality constraints,thenumberofiterationstoconvergenceandtheCPU times.Onecanobservethatforbothproblemsthecomputational effortincreasesmuchmorethanlinearlywiththesizebut still remainsreasonablegiventheproblemsize.Furthermore,asin pre-viousexamples,weobservethatthesizeoftheproblemhasamore significantimpactonthecomputationaleffortthanthenumberof controlvariables.
4.7. Comparisonwithavailablesolvers
Inthis sectionweperforma comparison withthetwo most efficientalternative availablesolvers for largescalesystems on Matpower Version4.1runningunder Matlab7.13[22],namely theMatlabInteriorPointSolver(MIPS)andthePrimalDual Inte-riorPointMethod(PDIPM).AlthoughMatpowerpossessesseveral interestinglessconventionalmodelfeatures,thecurrentversion doesnotallowmodellinganyamongourtwelvemoreclassicalOPF problemsintermsofobjectivefunctionandcontrolvariables.In ordertoenableanasfairaspossiblecomparison,weconsideronly theOPFobjectivefunctionofminimumgenerationcost/deviation, generators active/reactive powers as control variables, and
Table8
OPFcomparisonwithMatpower.
Basecase Obj. Oursolver
it/time MIPS it/time PDIPM it/time A L 97/71.9 66/31.8 76/37.8
A-PST L 346/252 Failed Failed
A Q 13/10.7 47/22.1 Failed
A-PST Q 20/15.7 32/17.8 42/20.6
constraintsonbranchcurrents,voltagemagnitudeand physical limitsongenerators’active/reactivepowers.Stillthereremaintwo slightmodellingdifferencesconcerningthetransformer transver-sal susceptanceand thehandlingof current constraints,asour solverimplementsonlyconstraintsonlongitudinalbranchcurrents
(7),whereasMatpowersolversimplementsuchconstraintsatboth endsofeachbranch.Furthermore,PDIPMimplementsonlyMVA flowconstraints.However,asthemaincomputationalburdenin IPM isthefactorizationofa linearsystemofequations[12],we noticethatasMatpowersolversrelyonthe“reducedKKTsystem” [10,21],thenumberofinequalityconstraintsdoesnotaffectthe sizeofthissystem,contrarytoourimplementationwhichusesthe fullKKTsystem(17).
Table8presentstheresultsofourexperimentsforfour feasi-bleOPFproblems,where“L”denotesthelinearobjective6function (24),“Q”denotesthequadraticobjectivefunctionMD(1),andthe basecaseA-PSThasbeenobtainedfromthebasecaseAbysetting tozerotheangleofall84phaseshiftersandusingasstartingpoint theloadflowsolutionofcaseA.
TheresultsshowthatbothMIPSandPDIPMsolvershavealower computationaleffortperiterationthanoursolver,whichis cer-tainlyduetotheuseofthereducedKKTsystemandpossiblythe libraryusedtosolvethissystem.However,oursolverconverges inreasonabletimeandisbothfasterandneedsalowernumber ofiterationsforthequadraticobjective.Theresultsalsoindicate that,similarlytothefailureofoursolverfortheproblemdescribed inSection4.5,otherexcellentsolversmayalsooccasionallyfail, especiallyonverytoughoptimizationproblemsasincaseA-PST. Inthelattercasetheverylargenumberofiterationsofoursolverto convergenceisnotsatisfactoryandcouldbepracticallyconsidered asacaseoffailure,e.g.ifamaximumrunningtimewasrequired. Wepresumethatbyrunningagainthesolverwithdifferentsetsof parameters[16]theconvergenceoffailedcasescouldberestored. Acomprehensivecomparisonconcerningtherelativereliabilityof thesesolversisoutofthescopeofthepaper,asitshouldconsider manydifferentOPFproblemsundervariedoperatingconditions. WeonlyunderlinetheneedtoimprovethereliabilityofIPMcodes forverytoughlargescaleOPFproblems.
Takingintoaccounttheslightmodelingdifferencesandthelarge numberof84branchcurrentbindingconstraints,weassessedthat inallcasesMIPSandoursolverconvergedpracticallytothesame solution.
4.8. SCOPFsolutionsona3012-bussystem
WeconsideramodelofthePolandpowersystemwhichOPF dataareavailableonMatpowerweb-site[22].Thesystem com-prises3012buses,3371lines,201transformers,and298generators (obtained after aggregating coexisting generators at the same bus).
Weconsidertheproblemofminimizinggenerationcostsolved byaSCOPFincorrectivemode[37].Weuse292generatorsactive
6NoticethatforthisobjectivefunctionoursolverfailedforamorecomplexOPF
Table9
SCOPFresultsforthePolandsystem.
Numbercontingencies dim(C) dim(KKT) Iter. Time(s)
0 480 33,640 35 6.7 1 960 68,446 38 24.4 2 1440 103,252 37 60.1 3 1920 138,058 42 122.3 4 2400 172,864 41 177.2 5 2880 207,670 41 68.7 6 3360 242,476 39 76.0 7 3840 277,282 40 88.2 8 4320 312,088 46 113.8 9 4800 346,894 47 129.0 10 5280 381,700 47 144.9 11 5760 416,506 47 158.1 12 6540 451,312 48 176.3
powerand188generatorsreactivepowerascontrolvariables,and constraintsonbranchcurrents,voltages,physicallimitson genera-tors’active/reactivepowers,andactivepowerre-dispatchof292 generatorsascorrectiveactions.
Table9showstheresultsobtainedwithoursolverforincreasing numbersofcontingenciesincludedintheSCOPF.Exceptmaybefor thecaseswherethenumberofcontingenciesincludedintheSCOPF rangesfrom1to4,thealgorithmscalesverywell.
TheseresultsshowthattheSCOPFsolutionforthisalreadyquite largesystemisreasonablyfastandcanbeenvisagedevencloseto real-time.Furthermore,comparingSCOPFresultsofTables7and9 for problems of close sizes one can observe that, the average computationaleffortperiterationforthe3012-bussystemis con-siderablyfasterthanforthe8387-bussystem,whichweexplain bythemuchworsenumericalconditioningofthelattersystem,as alreadydiscussedinSection4.1.
5. Discussion,conclusionsandperspectives
ThispaperhaspresentedextensivenumericalresultswithIPM forlargescaleOPF/SCOPFproblems,withthegoalofadvancingthe stateoftheknowledgeaboutthismethodintermsofrobustness andscalability.
Ourresultsshowthatnowadays,evenwithoutusingthemost powerfulcomputersavailableonthemarket,itiscertainly feasi-bletorunanNLPOPFforalargesysteminreal-timeprovidedthat areliablesolveris used.Furthermore,weprovethatourSCOPF codeis practicalona 3012-bus system.Ontheother hand,for thepoorlyconditioned8387-busgrid,computermemory limita-tionspreventedusfromincludingmorethanfewcontingencies (usingthefullnetwork model)intotheSCOPF,andthereforeto assesshowthecomputationaleffortfurtherscaleswiththe prob-lemsize.However,even assumingsufficientcomputermemory, asonecouldforesee thatforsuchasystemfewtensof contin-genciesmight bebindingattheoptimum,oursolvercouldnot complywithclosetoreal-timerequirements,whileitcould pos-siblystill beused in day-ahead operational planning.For such large-scalesystems,inordertorendertheSCOPFtractablein real-timeapplicationsonewillhavetoadoptapproximatemodelsfor post-contingencystates[27,34]orresorttoBendersdecomposition [37].
AsthefactorizationoftheHessianmatrix isbyfarthemost expensivecomputationaltaskofaninterior-pointalgorithm itera-tionthechoiceofasuitablelibraryforthesolutionofasymmetric, verysparse,and veryill-conditionedsystemoflinearequations isparamount.Inourimplementationweusedthesparse object-oriented library SPOOLES [38] which has several options, and wecouldexperimentthestrongdependenceofperformancevs. robustnesstradeoffsontheparticularoptionschosen.
Furthermore,inourimplementation,forthesakeof facilitat-ing theprogramming effort,wesolve ateach iteration the full systemofKKToptimalityconditionswhereas mostauthors rec-ommendtheuseofthe“reducedsystem”only[10],whichmay break-downthesizeofthesystemuptoaround30%byappropriate eliminationofthecomplementarityslacknessandinequality con-straints.Althoughthecomplementarityslacknessconstraintsare trivialequationsandthereforeshouldnotposeadditional prob-lemstoasmartlibrary,a furtherdecreaseofthecomputational timeshouldbeexpectedifonereliesonthe“reducedsystem”only. Our study also shows that the IPM algorithms proposedin thepowersystemsliteraturemayleadtoconvergenceproblems onveryhard optimizationproblems.Themaincauseof conver-genceproblems oftheIPMis thattheiterationsbecomesstuck atanon-optimalpointifoneapproachestooearlythefeasibility boundaryandthereforetheslackvariablesprematurelygoto0, aphenomenoncalledjamming[39].Fortunately,therearesome well-knownremediestorestoretheconvergenceofanIPM(e.g. changingtheinitialvalueofsomeparametersandespeciallythe barrier parameter, using a less aggressive decrease of the bar-rierparameter,usinganalternativeinterior-pointalgorithm,etc.) [16,40],buttheytakeadditionalcomputationaleffortwithout guar-anteeingsolutionrestoration.
WeenvisagetoimprovethereliabilityofourIPM implementa-tionbyfocusingonthreeaspects:theuseofanti-jammingremedies [39],regularization(ortoensurethesmoothnessofthesolution byaugmentingtheproblemwithpenaltyfunctionstobetterdeal withanill-posedHessianmatrix)[41],anduseofmeritfunctionsto ensurethatjointprogressismadebothtowardsalocalminimizer andtowardsfeasibility(thisprogressisachievedbyshorteningthe step-lengthalongtheNewtonsearchdirection)[42].
Asensiblesolutiontomitigatereliabilityissues,beyondusing appropriate librariesfor thesolutionof linearsystemsof equa-tions,wouldbetoembedarobustandfastgenericNLPsolverin theOPF[34].Nowadaysthereexistindeedseveralmaturegeneric NLPsolvers(e.g.KNITRO,IPOPT,LOQO,CONOPT,SNOPT,MINOS, etc.)thatprovedexcellentperformancesongenericproblemsas wellasforsomepowersystemproblemsmodeledinAMPL[43]or GAMS[44].
UsingOPF/SCOPFinreal-timeinvolvesamongothersthe suc-cessivesolutionsofcloselyrelatedNLPproblems.TheIPMdoesnot naturallywarmstartwellandhencecannotdirectlytake advan-tageofthesolutionsgottenattheprevioustime-steps.Although thecurrentspeedofIPMissatisfactorysince,aswithany Newton-basedmethodthenumberofiterationsgenerallyscalesacceptably withtheproblemsize,anyimprovementofitswarmstart abil-ity(or,moregenerally,ofitslearningability)iswelcome.Welook forwardtoassessonSCOPFproblemstheimprovementsreported forgenericNLPs(seee.g.[41]).Furthermore,recentresults[45] showthatmethodssupposedtowarmstartwell(e.g.SQP)mayfail onlargescaleproblemswithaverylargenumberofbinding con-straintsattheoptimum:inparticular,itwasfoundthatforNLPOPFs withequilibriumconstraints(inwhichequilibriumconstraintsare modeledbyRNSfunctions)thewarmstartofKNITRO(withSQP option)failedwhiletheSQPsolverSNOPTdidnotperformfaster thanthecoldstartofKNITRO(withIPMoption);also,theSQPsolver SNOPTfailedoncoldstartonmostproblems,whileKNITRO(with IPMoption)wasfoundthemostreliableamongthesolverstested [45].
Finally,thepresentpaperfocusedonNLPaspectsoftheOPF problem,buttheimpactontheoverallreliabilityandspeedofthe OPFprocessofotherkeyfeatures(e.g.handlingofdiscrete vari-ables,useoflimitednumbersofcontrolactions,etc.)remainalso tobecarefullyassessed[4,5,46,47].Inaddition,improvedwaysto analyzeandvisualizetheresultsoflarge-scaleOPF,e.g.incaseof gridcongestion,shouldbedevised[30].
Acknowledgments
TheauthorswouldliketothankRTEFrance(theFrench trans-missionsystem operator) for theirsupport and advices on the problemformulation.
FlorinCapitanescuissupportedbytheNationalResearchFund LuxembourgintheframeoftheCOREproject“Reliableandefficient distributedelectricitygenerationinsmartgrids”,C11/SR/1278568. Louis Wehenkel acknowledges the support of the Belgian NetworkDYSCO, fundedby theInteruniversityAttractionPoles Programme,initiatedbytheBelgian State,SciencePolicyOffice. Thescientificresponsibilityrestswiththeauthors.
WethankCleveAshcraft,themaindeveloperoftheSPOOLES library,for usefulsuggestionsconcerningtheproperuseof the libraryforoptimizationproblems.
WethankRayZimmerman,themaindeveloperofMatpower, for useful suggestions concerning the comparisons made with Matpower.
References
[1]J.Carpentier,Contributionàl’étudedudispatchingéconomique,Bulletindela SociétéFranc¸aised’Electricité3(1962)431–447.
[2]O.Alsac,B.Stott,Optimalloadflowwithsteady-statesecurity,IEEE Transac-tionsonPowerApparatusandSystemsPAS-93(3)(1974)745–751. [3]M.Ilic, ACOPFand smartgrids, in:presentation atFERCConferenceon
EnhancedOptimalPowerFlowModels,Washington,USA,2010.
[4]B.Stott,O.Alsac,A.J.Monticelli,Securityanalysisandoptimization,Proceedings oftheIEEE75(12)(1987)1623–1644(Invitedpaper).
[5]A.Papalexopoulos,Challengestoon-lineOPFimplementation,in:IEEE/PES WinterMeeting,NewYork,USA,1995.
[6]CORESO(RegionalCoordinationServiceCentre),http://www.coreso.eu [7]K.R. Frisch, The logarithmic potential method of convex programming,
ManuscriptatInstituteofEconomics,UniversityofOslo,Norway,1955. [8] A.V.Fiacco, G.P. McCormick,Nonlinear Programming: Sequential
Uncon-strainedMinimizationTechniques,JohnWilley&Sons,NewYork,1968. [9]Y.C. Wu, A.S. Debs, R.E. Marsten, Adirect nonlinear predictor–corrector
primal–dualinteriorpointalgorithmforoptimalpowerflows,IEEE Transac-tionsonPowerSystems9(2)(1994)876–883.
[10] S.Granville,Optimalreactivedispatchthroughinteriorpointmethods,IEEE TransactionsonPowerSystems9(1)(1994)136–142.
[11]G.D.Irrisari,X.Wang,J.Tong,S.Mokhtari,Maximumloadabilityofpower sys-temsusinginteriorpointnonlinearoptimizationmethods,IEEETransactions onPowerSystems12(1)(1997)162–172.
[12]G.L.Torres,V.H.Quintana,Aninterior-pointmethodfornonlinearoptimal powerflowusingrectangularcoordinates,IEEETransactionsonPowerSystems 13(4)(1998)1211–1218.
[13]H.Wei,H.Sasaki,J.Kubokawa,R. Yokohama,Aninteriorpointnonlinear programmingforoptimalpowerflowwithanoveldatastructure,IEEE Trans-actionsonPowerSystems13(3)(1998)870–877.
[14]DataofthePolandpowersystem,availableonlineattheMatpower(“AMATLAB PowerSystemSimulationPackage”byR.D.Zimmerman,C.E.Murillo-Sanchez, andDeqiangGan),web-page:http://www.pserc.cornell.edu/matpower/ [15]Data of IEEE 300-Bus System, 1996, Available from: http://www.ee.
washington.edu
[16]G.L.Torres,Nonlinearoptimalpowerflowbyinteriorandnon-interiorpoint methods,PhDThesis,UniversityofWaterloo,Canada,1998.
[17]G.L.Torres, V.H.Quintana,On anonlinearmultiple centralitycorrections interior-pointmethodforoptimalpowerflow,IEEETransactionsonPower Systems16(2)(2001)222–228.
[18]M.J.Rider,C.A.Castro,V.L.Paucar,A.V.Garcia,Higherorderinterior-point methodforminimisingload-sheddinginacompetitiveelectricpower mar-ket,IEEProceedingsGeneration,Transmission&Distribution151(4)(2004) 433–440.
[19]M.J.Rider,C.A.Castro,M.F.Bedrinana,A.V.Garcia,Towardsafastandrobust interiorpointmethodforpowersystemapplications,IEEProceedings Genera-tion,Transmission&Distribution151(5)(2004)575–581.
[20] Q.Y.Jiang,H.-D.Chiang,C.X.Guo,Y.J.Cao,Power–currenthybridrectangular formulationforinterior-pointoptimalpowerflow,IETGeneration Transmis-sion&Distribution3(8)(2009)748–756.
[21]H.Wang,C.E.Murillo-Sanchez,R.Zimmerman,R.J.Thomas,Oncomputational issuesofmarket-basedoptimalpowerflow,IEEETransactionsonPower Sys-tems22(3)(2007)1185–1192.
[22]R.Zimmerman,C.E.Murillo-Sanchez,R.J.Thomas,Matpower:steady-state operations,planning,andanalysistoolsforpowersystemsresearchand edu-cation,IEEETransactionsonPowerSystems26(1)(2011)12–19.
[23]S.Hao,A.Papalexopoulos,Externalnetworkmodelingforoptimalpowerflow applications,IEEETransactionsonPowerSystems10(2)(1995)825–837. [24]G.L.Torres,V.H.Quintana,Optimalpowerflowbyanonlinearcomplementarity
method,IEEETransactionsonPowerSystems15(3)(2000)1028–1033. [25]V.A.deSousa,E.C.Baptista,G.R.M.daCosta,Optimalreactivepowerflowvia
themodifiedbarrierLagrangianfunctionapproach,ElectricPowerSystems Research84(1)(2012)159–164.
[26] V.A. de Sousa, E.C. Baptista, G.R.M. da Costa, Loss minimization by the predictor–corrector modified barrier approach, Electric Power Systems Research79(5)(2009)803–808.
[27]O.Alsac,J.Bright,M.Prais,B.Stott,FurtherdevelopmentsinLP-basedoptimal powerflow,IEEETransactionsonPowerSystems5(3)(1990)697–711. [28]T.J.Bertram,K.D.Demaree,L.C.Dangelmaier,Anintegratedpackagefor
real-timesecurityenhancement,IEEETransactionsonPowerSystems5(2)(1990) 592–600.
[29] K.Karoui,L.Platbrood,H.Crisciu,R.A.Waltz,Newlarge-scalesecurity con-strainedoptimalpowerflowprogramusinganewinterior-pointalgorithm, in:5-thInternationalConferenceonEuropeanElectricityMarket,2008. [30]T.J.Overbye,XuCheng,YanSun,AcomparisonoftheACandDCpowerflow
modelsforLMPcalculations,in:Proc.ofthe37thAnnualHICSSconference, Hawaii,2004.
[31] R.Jabr,N.Martins,B.Pal,S.Karaki,ContingencyconstrainedVArplanningusing penaltysuccessiveconicprogramming,IEEETransactionsonPowerSystems27 (1)(2012)545–553.
[32]A.MaranoMarcolini,F.Capitanescu,J.L.MartinezRamos,L.Wehenkel, Explo-itingtheuseofDCSCOPFapproximation toimproveiterativeACSCOPF algorithms,IEEETransactionsonPowerSystems(2012).
[33]P.J.Macfie,G.A.Taylor,M.R.Irving,P.Hurlock,H.-B.Wan,Proposedshunt roundingtechniqueforlarge-scalesecurityconstrainedlossminimization,IEEE TransactionsonPowerSystems25(3)(2010)1478–1485.
[34]L.Platbrood,H.Crisciu,F.Capitanescu,L.Wehenkel,Combiningiterative algo-rithmsandnetworkcompressionforsolvingverylargescaleSCOPFproblems, in:PSCCConference,Sweden,August,2011.
[35] F.Capitanescu,M.Glavic,D.Ernst,L.Wehenkel,Interior-pointbased algo-rithmsforthesolutionofoptimalpowerflowproblems,ElectricPowerSystems Research77(5–6)(2007)508–517.
[36]J.Gondzio,Multiplecentralitycorrectionsinaprimal–dualmethodfor lin-ear programming,Computational OptimizationandApplications 6(1996) 137–156.
[37]A.J.Monticelli,M.V.P.Pereira,S.Granville,Security-constrainedoptimalpower flow withpost-contingencycorrectiverescheduling, IEEETransactionson PowerSystems2(1)(1987)175–182.
[38] C.Ashcraft,R.Grimes,SPOOLES:anobject-orientedsparsematrixlibrary,in: Proceedingsofthe1999SIAMConferenceonParallelProcessingforScientific Computing,1999,pp.22–27.
[39] H.Y.Benson,D.F.Shanno,R.J.Vanderbei,Interior-pointmethodsfornonconvex nonlinearprogramming:jammingandcomparativenumericaltesting, Math-ematicalProgramming,SeriesA99(1)(2004)35–48.
[40]J.Nocedal,A.Waechter,R.Waltz,Adaptivebarrierupdatestrategiesfor nonlin-earinteriormethods,SIAMJournalonOptimization19(4)(2009)1674–1693. [41]H.Y.Benson,D.F.Shanno,Interior-pointmethodsfornonconvexnonlinear pro-gramming:regularizationandwarmstarts,ComputationalOptimizationand Applications40(2)(2008)143–189.
[42]H.Y.Benson,D.F.Shanno,R.J.Vanderbei,Interior-pointmethodsfornonconvex nonlinearprogramming:filtermethodsandmeritfunctions,Computational OptimizationandApplications23(2)(2002)257–272.
[43]AModelingLanguageforMathematicalProgramming(AMPL),Availablefrom: www.ampl.com
[44]B.A. McCarl, GAMS User Guide, Version 23.6, 2011, Available from: www.gams.com
[45]L. Platbrood, S.Fliscounakis, F. Capitanescu,P. Panciatici, C. Merckx,M. Ortega-Vazquez,DeliverableD3.2:developmentofprototypesoftwarefor sys-temsteady-stateoptimizationoftheEuropeantransmissionsystem,PEGASE project,2011,Availablefrom:http://www.fp7-pegase.eu/
[46]B.Stott,O.Alsac,Optimalpowerflow–basicrequirementsforreal-life prob-lemsandtheirsolutions,in:SEPOPEXIISymposium,RiodeJaneiro,Brazil,May 2012(Whitepaper).
[47]F. Capitanescu,J.L.Martinez Ramos,P. Panciatici,D. Kirschen,A. Marano Marcolini, L.Platbrood, L.Wehenkel, Security-constrainedoptimal power flow:state-of-the-art,challenges,andfuturetrends,ElectricPowerSystems Research81(8)(2011)1731–1741.