UNIVERSTI TEKNIKAL MALAYSIA MELAKA
HUMAN ROBOT INTERACTION (HRI) USING SIMPLE,
INTERACTIVE ROBOTS
This report is submitted in accordance with requirement of the Universiti Teknikal Malaysia Melaka (UTeM) for the Bachelor Degree of Manufacturing Engineering
(Robotics and Automation) (Hons.)
by
AHMAD FARIS BIN AZMIN B051210190
930420-03-6001
DECLARATION
I hereby, declared this report entitled “Human-Robot Interaction (HRI) using Simple, Interactive Robot” is the results of my own research except as cited in references.
Signature : ……… Author’s Name : AHMAD FARIS BIN AZMIN
APPROVAL
This report is submitted to the Faculty of Manufacturing Engineering of UTeM as a partial fulfillment of the requirements for the degree of Bachelor of Manufacturing Engineering (Robotics and Automation) with Honours. The member of the supervisory committee is as follow:
………. (Project Supervisor)
ABSTRACT
Most of the robots used in human-robot interaction (HRI) studies are very expensive due to their advance complexities and function. This has become a limitation in this research area. Thus, this project is motivated to investigate how simple, interactive robots such as My Keepon and RoboBuilder robot can be feasible alternative for HRI studies. Simple robots can be the key platform in HRI studies since they are cheap and are re-programmable for many purposes. In this project, HRI interaction programs were developed using My Keepon, a simple toy like-creature and also RoboBuilder, a simple humanoid robot. These robots will give initial exposure to the children about robotic technologies. The feedback on My Keepon and RoboBuilder features that are attractive to the children during HRI are analyzed using Kansei Engineering method. Kansei Engineering is used to analyze whether the children are attracted towards simple robot or not. Four children consisting of both girls and boys from age 4 and 5 years old were selected from a kindergarten for the HRI observation. The children interacted with My Keepon through static interaction and active interaction for RoboBuilder. Video records of the interaction are analyzed using Kansei Engineering by giving scores on eight different emotions. An interview session after the experiment showed how the children emotionally perceive My Keepon and RoboBuilder as a robotic play companion. From the results, the children showed positive reactions when interacting with both robots. It is suggested that a simple robot can be a play companion for the children in a kindergarten.
ABSTRAK
Kebanyakan robot yang dicipta untuk interaksi manusia-robot (HRI) adalah sangat
mahal disebabkan oleh kerumitan untuk menciptanya dan juga fungsi robot tersebut.
Ini telah menjadi satu limitasi bagi pengkaji di dalam bidang ini. Projek ini adalah
didorong oleh keadaan ini, bagaimana robot yang mudah dan interaktif seperti robot
My Keepon dan RoboBuilder boleh digunakan sebagai alternatif untuk kajian HRI.
Robot seperti ini boleh menjadi platform utama dalam kajian HRI dan mereka
senang diprogramkan semula untuk pelbagai tujuan. Projek ini membangunkan
program-program interaksi berasaskan HRI untuk My Keepon, robot yang
seakan-akan sebuah permainan dan juga RoboBuilder, sebuah robot yang berbentuk seperti
badan manusia. Robot ini akan memberi pendedahan awal kepada kanak-kanak
tentang teknologi robot. Maklum balas kepada ciri-ciri My Keepon dan RoboBuilder
yang menarik kepada kanak-kanak semasa interaksi HRI dianalisis menggunakan
kaedah Kansei Engineering. Kansei Engineering digunakan untuk menganalisisa
sama ada kanak-kanak tertarik ke arah robot mudah atau tidak. Empat kanak-kanak
yang terdiri daripada dua kanak-kanak perempuan dan dua kanak-kanak lelaki yang
berumur 4 dan 5 tahun akan dipilih daripada sebuah tadika untuk interaksi HRI.
Kanak-kanak berinteraksi dengan My Keepon melalui interaksi statik manakala
interaksi aktif untuk RoboBuilder. Video ini akan dianalisa menggunakan kaedah
Kansei Engineering dengan memberi skor kepada lapan emosi yang berbeza. Sesi
temuduga selepas eksperimen menunjukkan bagaimana kanak-kanak melihat My
Keepon dan RoboBuilder sebagai teman sepermainan. Dari keputusan itu,
kanak-kanak ini menunjukkan reaksi positif apabila berinteraksi dengan kedua-dua buah
robot. Ciri-ciri yang mudah pada kedua-dua robot berjaya menarik perhatian
kanak-kanak tersebut. Daripada ini, dapat dicadangkan bawaha robot mudah boleh menjadi
teman sepermainan kanak-kanak di sesebuah tadika.
ACKNOWLEDGEMENT
Bismillahirrahmanirrahim,
In the first place, Alhamdulillah praises to the Almighty God, Allah SWT, with His willing has given me the opportunity to successfully complete this Final Year Project (FYP).
Secondly, I would like to express my sincere gratitude to my project supervisor, Dr Syamimi Binti Shamsuddin for the continuous support throughout this project. Her patience, motivation, enthusiasm and professionally giving advice had help me a lot in making this project possible and running smoothly as per planning schedule.
Not to mention all those lecturers and staffs in Faculty of Manufacturing Engineering, UTeM who helped me in many ways in this project especially to those who are under the Department of Robotics and Automation. Their tireless cooperation, insightful comments and inspiration had given me the ideas to run this project successfully.
Thanks also to my friends who have been with me and contributed well in my project by constantly supporting me, giving ideas, and always stay beside me when I am having hard time during this project.
Last but not least, I would like to thank all my family especially to my parents for giving me support spiritually and for their endless support and prayer to see me completely finish this project.
TABLE OF CONTENTS
Abstract i
Abstrak ii
Acknowledgement iii
Table of Contents vi
List of Tables vii
List of Figures viii
List of Abbreviations x
CHAPTER 1 INTRODUCTION
1.1 Background 1
1.2 Problem Statement 3
1.3 Project Objectives 4
1.4 Scope and Limitation 4
CHAPTER 2 LITERATURE REVIEW
2.1 What is a robot? 6
2.1.1 Types of Robot 8
2.2 Human-Robot Interaction (HRI) 10
2.2.1 Types of Robot Used in HRI 12
2.3 Kansei Engineering 15
2.4 My Keepon Robot 17
2.5 Review of Past Studies 20
2.6 Summary 28
CHAPTER 3 METHODOLOGY
3.1 Flowchart of Project Methodology 29
3.2 Stage 1: Preliminary Study 31
3.3 Stage 2 and 3: Programming & Modification 32
3.3.1 Program Flow for My Keepon 32
3.3.2 Part A: My Keepon Hardware and Software 32 3.3.2.1 My Keepon Structure and Function 34 3.3.3 Part B: Designing circuit and Program 36
3.3.3.1 Arduino Shield 36
3.3.3.2 Developing the Program 37
3.3.4 Part C: Commisioning of My Keepon System 40 3.3.4.1 Hardware Testing and Analysis 41
3.3.5 Program Flow for RoboBuilder 41
3.3.5.1 Software Overview for RoboBuilder 43 3.3.6 Part F: Commissioning of RoboBuilder System 46
3.3.7 Part G: Debugging Process 46
3.3.8 Hardware Testing and Analysis 46
3.3.8.1 Uploading Programming 46
3.4 Stage 4: Experimental Setup for HRI 49
3.4.1 Experimental Procedures 51
3.4.2 Results & Documentations 53
CHAPTER 4 RESULTS & DOCUMENTATION
4.1 Designing Programming 55
4.2.1 Flowchart for the First Session Interaction (My Keepon) 55 4.2.2 Flowchart for the Second Session Interaction (RoboBuilder) 57
4.2 Results 58
4.2.1 Survey Results 59
4.2.1 Kansei Engineering Results 61
4.3 Discussion 66
4.3.1 Survey Clustering (My Keepon) 66
4.3.2 Survey Clustering (RoboBuilder) 68
4.3.3 Kansei Engineering Analysis (My Keepon) 70 4.3.4 Kansei Engineering Analysis (RoboBuilder) 72 4.3.5 Comparison on Kansei Engineering Results 74
4.4 Summary 75
CHAPTER 5 CONCLUSIONS & RECOMMENDATION
5.1 Conclusion 76
5.2 Recommendation for Future Works 77
5.3 Sustainability 77
REFERENCES 79
APPENDICES
A QUESTIONNAIRE SURVEY (MY KEEPON) B QUESTIONNAIRE SURVEY (ROBOBUILDER) C KANSEI EVALUATION SHEET
D KANSEI EVALUATION SHEET
E SUBJECT INFO SHEET FOR PARENT F ETHICS APPROVAL LETTER
G GANTT CHART FOR PSM I H GANTT CHART FOR PSM II
LIST OF TABLES
2.1 Type of HRI used based on remote and proximate interaction 14
2.2 Comparison on previous research 21
3.1 Functions & Descriptions of MotionBuilder 44
4.1 Survey result for My Keepon 60
4.2 Survey result for RoboBuilder 60
4.3 Results on Kansei Engineering Method Analysis for My Keepon (Boys) 62 4.4 Results on Kansei Engineering Method Analysis for My Keepon (Girls) 63 4.5 Results on Kansei Engineering Method Analysis for RoboBuilder (Boys) 64 4.6 Results on Kansei Engineering Method Analysis for RoboBuilder (Girls) 65
LIST OF FIGURES
1.1 NAO robot 2
1.2 Keepon Pro robot 3
2.1 Unimate, the first industrial robot builds 7
2.2 Classification of type of robot 8
2.3 U-Bots sorting objects 11
2.4 An example of HRI 12
2.5 The Micto Surge System 13
2.6 A furniture-assembling robot in IKEA 14
2.7 The Process of Kansei 15
2.8 Kansei Gateways 16
2.9 Keepon’s deformable body 17
2.10 Keepon’s kinematic mechanism 18
2.11 Keepon’s trajectory movement 18
2.12 Internal and external structures of Keepon 19
2.13 An example of kid playing with Keepon 20
3.1 Flowchart of the project methodology 30
3.2 Concept of Literature Review 31
3.3. Sub-Processs for Stage 2 33
3.4 Keepon trajectory movement 34
3.5 Keepon;s four degree of freedom 34
3.6 Keepon controller board 35
3.7 Connection between the systems 35
3.8 Arduino Shield 37
3.9 Systematic approach to programming 38
3.10 User Interface of ViKeepon 40
3.11 Programming process flow for RoboBuilder 42
3.12 MotionBuilder software 43
3.13 RoboBuilder Robot Configuration 45
3.15 Debuggging Process Flowchart (RoboBuilder) 47
3.16 RoboBuilder Download Tool 48
3.17 Process flow for the experiment 49
3.18 Experimental plan layout for My Keepon 52
3.19 Experimental plan layout for RoboBuilder 53
4.1 The process flow for first session 56
4.2 The process flow for second session 57
4.3 My Keepon interaction session 58
4.4 RoboBuilder interaction session 59
4.5 Video evaluation session using Kansei Engineering 61
4.5 Understanding Rating (My Keepon) 66
4.6 Experience Rating (My Keepon) 67
4.7 Enjoyment Rating (My Keepon) 67
4.8 Understanding Rating (RoboBuilder) 68
4.9 Experience Rating (RoboBuilder) 69
4.10 Enjoyment Rating (RoboBuilder) 69
4.11 Kansei Graph (My Keepon) (+ve) 70
4.12 Kansei Graph (My Keepon) (-ve) 71
4.13 Kansei Graph (RoboBuilder) (+ve) 72
4.14 Kansei Graph (RoboBuilder) (-ve) 73
4.15 Radar graphs (+ve) 74
4.16 Radar graphs (-ve) 75
LIST OF ABBREVIATIONS
HRI - Human-Robot Interaction HCI - Human-Computer Interaction KE - Kansei Engineering
UART - Universal Asynchronous Receiver/Transmitter FKP - Fakulti Kejuruteraan Pembuatan
UTeM - Universiti Teknikal Malaysia Melaka DOF - Degree of Freedom
DOE - Design of Experiment ECE - Early Childhood Education S.Pos - Start Position
D.Pos - Display Position
CHAPTER 1
INTRODUCTION
Chapter 1 will give a brief explanation about this project, starting with the background of the project title, “Human-robot Interaction (HRI) with a Simple, Interactive Robot”. This chapter will also discuss about the problem statement, objectives, scope and limitation, and also the project planning..
1.1 Background
According to Fong et al. (2001) robot can be generally considered as a machine or device in which it can performs tasks according to what the human command. Some robots require some degree of guidance, which may be done using a remote control, robot manipulator or with a computer interface that can be program and re-program by human operator. This re-programmability characteristic can helps to distinguish between robots and other automatic machine.
With the advancing technologies and rapid progress of digital computer that has brought about the era of intelligent robots, they have evolved so much and are capable of mimicking humans that they seem to have a mind of their own. In this 21st century, robots are increasingly being developed for real world application areas, such as robots as diseases treatment, rehabilitation, eldercare, or as household appliance. Since intelligent robots can accomplish more complex and varied tasks, the role of human control over the robot also dramatically increased.
Human-robot interaction (HRI) is an emerging field aimed at improving the interaction between human beings and robots in various activities in which operate in changing real-world environments. It is suggested that robots as partners can help us accomplish more meaningful work and achieve better results (Fong et al., 2001) Nowadays, HRI have been widely used in many fields to help us to achieve a better life in the future. However, in this country that we live, HRI is still very unfamiliar because not so many people have taken the step do the study and experimenting the HRI due to some difficulties.
[image:15.595.268.369.442.657.2]In order to do research in HRI field, the robot must be design in the simplest way possible so that the human may feel comfortable and ease when interacting with the robot. Robots such as Asimo and NAO (Figure 1.1) are designed based on human-like structure or also can be called as humanoid robot while robot human-like Keepon Pro (Figure 1.2) has a toy-like structure for the purpose of interacting with children especially those with autistic disorder (Kozima. et al., 2005). There is several more robots structure that is designed for the purpose of HRI study with each robot shape suits different application
Figure 1.1: Humanoid robot NAO
(Source: https://www.ald.softbankrobotics.com/en/cool-robots/nao)
Figure 1.2: My Keepon robot (Source: http://www.mykeepon.com)
1.2 Problem Statement
There are three problems statement that need to be highlighted in relation to this project.
a) Most of the robots platforms used for research and study for HRI are very expensive. Successful robots such as Asimo, NAO, Keepon Pro have a very high price tag due to their complexity with high degrees of freedom. On the contrary, low cost and simpler robots like Furby, Pleo or Ono are not officially modifiable. Thus, modifying cheap commercial robots can be a key to develop low-cost programmable platforms for HRI studies.
b) Advancements in technology are happening every single day. Kids around the world are being exposed to the robotic technologies. Simple interactive HRI robot can help to expose the children about the ever advancing robotic technologies c) Robot developed for child-robot interaction is still at an early stage. To develop
robot which is suitable for children, experiment is done to analyze whether the children are more attracted to complex or simple robot. By using the Kansei Engineering method in this experiment, it can study and analyze the features of the robot that managed to attract the attention of the children thus improving the HRI robot for future studies.
1.3 Project Objectives
The ultimate goal of this project is to program My Keepon and RoboBuilder robot to interact with children. The specific objectives that need to be achieved are;
a) To develop HRI programs for My Keepon and RoboBuilder to interact with the children at a kindergarten
b) To analyze the emotional feedback of the children towards the robot through interview session and Kansei Engineering Method
1.4 Scope and Limitation
The purpose of this project is to develop Human-Robot Interaction using a simple interactive robot. The HRI involves both software and hardware to integrate the robot to interact with humans.
This project involves theoretically and practically study on the development of My Keepon and RoboBuilder robot to interact with children. The scope and limitation of this project shall be indicated as follow.
a) This project concentrates on the programming of My Keepon robot using Arduino Uno as the interface. Microsoft C# and Arduino will be used as the computer languages to do the programming.
b) For RoboBuilder, MotionBuilder software which is provided by the manufacturer will be used to program the robot.
c) 4 kindergarten children (age 4 – 5 years old) will be the participants for this study since children are very sincere in giving opinion and expression.
d) The children that participate must be able to at least understand English since there will be survey and questionnaire question at the end of the experiment.
e) The analysis of Kansei Engineering method will be focusing based on the response from the children and their facial reaction towards the features of the robot that they may find interesting during the interaction.
f) The children will do static interaction with My Keepon and spontaneous interaction with RoboBuilder.
CHAPTER 2
LITERATURE REVIEW
This chapter presents a literature summary at the beginning of a research which aims to review the critical points of the research. Literature review has been conducted in order to obtain the information on the current technology available and the methodology being used by other researchers on the same topic or field all around the world. This chapter provides the key points related to human-robot interaction (HRI) and Kansei Engineering method as a tool to evaluate HRI.
2.1 What is a robot?
Girme et al. (2007) proposed that a robot is an electro-mechanical device that can accomplish either one of autonomous or semi-autonomous or pre-programmed tasks. According to Robot Institute of America (1979), a robot is defined as a reprogrammable, multifunctional manipulator designed to move material, parts, tools, or specialized devices through various programmed motions for the performance of a variety of tasks. (Bekey, 1999) stated in his thesis that robots are generally machines that can sense, think and act which also frequently called as intelligent agents.
However, as strange as it might seem, there is really no standard definition for a robot. Joseph Engelberger, a pioneer in industrial robotics once said that even he cannot define what actually is a robot but he know it is a robot when he see one (Harris, 2007).
The word ‘robot’ was first cited by the Czech playwright and novelist Karel Capek (1890 – 1938) from the Czech word, robota, meaning “forced labor”. The use of the
word Robot was introduced into his play R.U.R (Rossum’s Universal Robot) in the early 1921. In the play, robot featured as fictional humanoid devices as the servants for humans in which the robots eventually overthrow their human creators.
In the year 1954, George Devol invented the first digital and programmable robot known as Unimate, the first kind of robot manipulators. Unimate (Figure 2.2) were proposed by Devol in the United States; a company started by Devol and Engelberger produced the first commercial versions of these machines in 1962.
Waurzyniak and Patrick (2006) said that the invention of Unimate has ultimately laid
the foundation in technology of modern industrial robotics. Industrial robots had rapidly grown as an important role in the manufacturing industries since then.
Figure 2.1: Unimate, the first industrial robot build (Source: http://www.computerhistory.org/)
Since robots are agents in the world they are also subject to the laws, rules, or principles which are designed to ensure a friendly robot behavior environment is created. Asimov has proposed in his book back on year 1950, ‘I, Robot’ the three laws in robotics, also known as Asimov’s Laws. He then latter added a ‘zeroth law’.
\
[image:20.595.212.421.327.507.2]• Law Zero : A robot may not injure humanity, or, through inaction, allow humanity to come to harm.
• Law One : A robot may not injure a human being, or, through inaction, allow a human being to come to harm, unless this would violate a higher order law.
• Law Two : A robot must obey orders given it by human beings, except where such orders would conflict with a higher order law.
• Law Three : A robot must protect its own existence as long as such protection does not conflict with a higher order law.
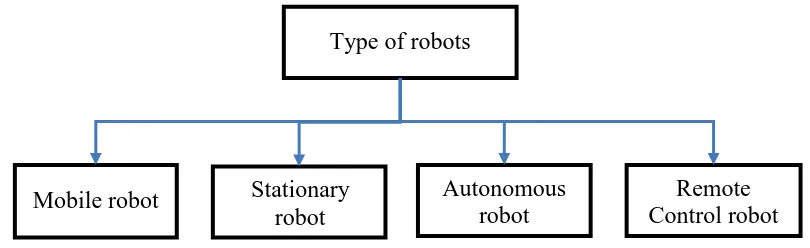
2.1.1 Types of Robot
[image:21.595.117.522.533.657.2]In the recent years there have been drastic improvements of robot whereby robots do a lot of different tasks in many fields and the robot becomes more complex as greater number of jobs are entrusted to them. In order to identify the robots, we divide them by their application. A robot needs to be above all functional and designed with qualities that suit its primary tasks. It depends on the task at hand whether the robot is big, small, and able to move or nailed to the ground. Each and every task means different qualities, form and functions; a robot needs to be designed with the task in mind. Figure 2.2 further shows the classification of type of robots.
Figure 2.2: Classification of type of robots
Type of robots
Mobile robot Stationary robot
Autonomous robot
Remote Control robot
Mobile robots are robots that are able to move freely according to the design and programs setup. Usually they perform task such as loading and unloading of load in factory, search areas, used in war, delivering heavy parts in industrial factories. For an instant, AGV robots are used in industry to autonomously delivering parts between several stations in a factory. Mobile robots are utilized for task where individual cannot access without risking their lives.
Stationary robot is a robot that is completely contra to the mobile robot. Most stationery robots are big and heavy, and created to perform repeating tasks without ever for them need to move. Particularly dull, repeating and heavy tasks are suitable for this kind of robots. Stationery robot is used for dull and repeating task because robot will never be exhausted or tired, it can continuously perform its duty day and night without ever complaining. Once the task is done, the robot can be re-programmed easily to perform another task.
Autonomous robots are intelligent machine that capable to works on their own or independently in which they can rely on the brains instead of human operator. Autonomous robots run programs that give them the opportunity to decide the action that they want to perform depending on the surroundings or environments. Autonomous robots can learn or gain new knowledge by adjusting themselves to the new environments or by adjusting new methods of accomplishing task instead of doing it the same way.
In case where a robot must to perform more complicated yet undetermined tasks, an autonomous robot is not the right decision to practice. Complicated tasks are still best performed by human beings with genuine intellectual brainpower to make the critical decision. Generally, a robot can only make decisions based on what the human program them, whereas human can make decision based on emotional and environment factors. Thus, in some situation, a human decision is needed whereby a robot capability is used to perform task. In this way, a human can guide a robot by remote control to do task which cannot be done by the human. A person can perform difficult and usually dangerous tasks without being at the spot where the tasks are performed.
For the purpose of studying HRI, robots should be designed to interact with human in the simplest way possible. Robots used in HRI field are usually autonomous and have living-like creatures so that the human will feel more comfortable when interacting with them. The robot can be in the form of animal, human or other things that it may look like it is alive. The design of the robot is different based on the application and environment.
2.2 Human Robot Interaction (HRI)
From the earliest starting point of naturally enlivened robots, researchers have been interested by the likelihood of robots interfacing with one another. Universally, the world is moving forward into a situation where there is a significant desire within the society to see useful robots ubiquitous in our day-to-day lives. In the modern era of 21st century, robots are not developed only to do heavy job in the industrial field, instead they are also created to help humans in various activities. Humans seem to have a specific interest about understanding and mimicking the nature in general, and, specifically, human beings (Dautenhanh, 2007). The nature of interactivity and social behavior in robot and humans are the main obstacles in the research field of HRI.
Human-robot interaction research are closely affiliated with human-computer interaction (HCI), as most of the modern robotic system employ hardware and software components are used in other common computing system. Nonetheless, a clear comparison can be made between them. Human-computer interaction basically deals with user interface technologies such as the input devices; keyboard, mouse, etc, in which the input is done manually by human operators. Whereby, HRI deals with direct interaction between the human and robot itself, the robot interact with the world and physically with the human operators.
As the field of simulated life developed, scientists started applying standards, for example, indirect communication between individuals via modifications made to the shared environment to accomplish "aggregate" or "swarm" robot conduct. Grass’e
clarify how social insect societies can collectively produce complex behavior patterns and physical structures, regardless of the possibility that every individual seems to work alone (Bonabeau, 1999). Deneubourg and his collaborators pioneered the first experiments in simulated and physical “ant-like robots” (Deneubourg et al., 2000) in the early 1990’s. Since then, numerous researchers have developed robot collectives (Kube, Bonabeau, 2000) and have used robots as models for studying social insect behavior.
Figure 2.3: U-Bots sorting objects (Melhuish, Holland and Hoddell, 1998)
However, the research shown above only as far uses the methods of self-organization and behavior inspired by social insect societies. Such social orders are unknown, homogeneous gatherings in which individuals don't make any difference. This kind of "social conduct" has ended up being an attractive model for robotics technology, especially due to the abilities of the simple robot to perform difficult task (e.g., soccer, basketball playing). (Dautenhahn, Billard, 1999) proposed that social robots a part of the heterogeneous group; a society consisting of both robots and humans. They are able to recognize each other and engage in social interaction, interpret the environment based on their experience, and explicitly communicate with and learn from each other.
HRI robot represents an interaction technology, which breaks the boundaries of interaction between human and robot. Behaviours and appearances of robot have drastically changed since early 1990s, and with the never ending technologies, they still and will continue to change. Charles Rich in 2008 said we need to understand how to program human-like robots if we want them to move freely among us.