White Rose Research Online URL for this paper:
http://eprints.whiterose.ac.uk/10638/
Article:
Xia, X. and Zinober, A. (2004) Periodic orbits from Δ-modulation of stable linear systems.
IEEE Transactions on Automatic Control, 49 (8). pp. 1376-1380. ISSN 0018-9286
https://doi.org/10.1109/TAC.2004.832664
[email protected]
https://eprints.whiterose.ac.uk/
Reuse
Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright
exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy
solely for the purpose of non-commercial research or private study within the limits of fair dealing. The
publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White
Rose Research Online record for this item. Where records identify the publisher as the copyright holder,
users can verify any specific terms of use on the publisher’s website.
Takedown
If you consider content in White Rose Research Online to be in breach of UK law, please notify us by
Periodic Orbits From -Modulation of Stable Linear Systems
Xiaohua Xia and Alan S. I. Zinober
Abstract—The1-modulated control of a single input, discrete time, linear stable system is investigated. The modulation direction is given by where 0 is a given, otherwise arbitrary, vector. We ob-tain necessary and sufficient conditions for the existence of periodic points of a finite order. Some concrete results about the existence of a certain order of periodic points are also derived. We also study the relationship between certain polyhedra and the periodicity of the1-modulated orbit.
Index Terms—Delta-modulation, periodic points, sliding-mode control, polyhedra.
I. INTRODUCTION
The determination of self-excited oscillations or limit cycles, orig-inated in the work of Poincaré and Lyapunov, is an old and difficult problem inthe classic qualitative theory of dynamical systems [7]. For discrete-time systems, the problem has been tackled from different an-gles, from counting the number of types of periodic orbits [6], the arith-metic of the number of periodic points [4], existence [10], and calcula-tion[13] of the periodic points.
Hybrid systems resulting from the switching of controllers constitute a special class of nonlinear dynamical systems [12]. Though stability properties around a specific limit cycle/periodic orbits have been dis-cussed [8], there are very few results on the existence and characteriza-tion of periodic points introduced by switchings. In [11], the existence of a globally attractive periodic behavior is proved for some switched flow networks. Periodic points arising from1-modulationhave been characterized for scalar systems in[14], [15] and for a special class of higher order systems in[5]. Periodic orbits of different order have also been shown in [16] and [17] to exist when discretizing the equivalent control based sliding-mode controllers.
Inthis note, we investigate the 1-modulated control of a single input, discrete time, linear stable system. The1-modulationis de-signed along a direction given bycTxwherecis a given, otherwise ar-bitrary, vector inRnnf0g. We define a modulated orbit corresponding to anorbit of the feedback system. We prove that the periodicity of the system orbit is related intrinsically to the periodicity of the cor-responding modulated orbit. Necessary and sufficient conditions are stated for the existence of periodic points of a finite order. Some con-crete results about the existence of a certain order of periodic points are also obtained. The relationship between certain polyhedra and the periodicity of the1-modulated orbit is explored.
II. GENERALRESULTS
We consider a discrete-time control system of ordern
x+= Ax + bu (1)
Manuscript received July 19, 2003; revised February 23, 2004. Recom-mended by Associate Editor U. Jonsson. This work was supported by the Engineering and Physical Sciences Research Council (EPSRC) under Grant GR/S41050/01.
X. Xia is with the Department of Electrical, Electronic, and Computer Engineering, the University of Pretoria, Pretoria 0002, South Africa (e-mail: [email protected]).
A. S. I. Zinober is with the Department of Applied Mathematics, The Uni-versity of Sheffield, Sheffield S10 2TN, U.K. (e-mail: [email protected]).
Digital Object Identifier 10.1109/TAC.2004.832664
wherex 2 Rnis the state,x+ denotes the system state at the next discrete time step,u 2 Ris the scalar input,Ais ann 2 nmatrix of real numbers, andbis a columnvector ofnreal numbers. In this note, we assume thatAis a stable matrix, i.e., the eigenvalues ofAlie within the unit circle.
For any input sequencefu0; u1; . . .gand an initial statex0, there is
a corresponding orbit of system (1)fx(0); x(1); . . .g, inwhich
x(0)= x 0
x(i)= Ax(i01)+ bu i01
fori = 1; 2; . . .. As usual, the orbitfx(0); x(1); . . .gis called periodic with periodL, if there is a positive integerLsuch thatx(L01)= x(0). The smallest such integerLis called a prime period, and we say that the orbit isL-periodic. Any point in a periodic orbit is called a periodic point.
The following result concerning periodic orbits from external peri-odic excitation is well known.
Theorem 1:
i) For a periodic input sequence of periodL, there is a periodic orbit of periodLfor (1).
ii) This periodic orbit is globally attracting.
Now, we turnto the situationof1-modulated control of system (1). Inthis case, the controluis1-modulated feedback defined by
u = sgn(cTx) (2)
inwhichc 2 Rnnf0gis a fixed, otherwise arbitrary, modulationdi-rection.1-modulation is a very robust scheme of modulation, a con-cept borrowed from communication. A great advantage of1 -modu-lated feedback is that it needs only a bit of datum to implement the controller [1]. To avoid confusion, we define
sgn(cTx) = 1; whencTx 0
01; whencTx < 0:
Supposefx0; x1; . . . ; gis anorbit of the closed-loop system (1) and
(2) starting fromx0. The sequence defined byfs0; s1; . . . ; g, where
si = sgn(cTxi), fori = 0; 1; . . ., is abinarysequence of1’s and
01’s. We will call it a modulated orbit of the closed-loop system (1) and (2) corresponding to the orbitfx0; x1; . . .g.
Obviously, the modulated orbit of a periodic orbit of the closed-loop system (1) and (2) is periodic. Therefore, to determine the periodicity of anorbit of a1-modulated system, from Theorem 1, it is decisive to see whether the1-modulationin(2) introduces a periodicbinary
sequence. This is addressed by the following theorem.
Theorem 2: The1-modulated system (1) and (2) has a periodic orbit of periodLif and only if there are0; 1; . . . ; L012 f01; 1g
such that
cT(I 0 AL)01 L01
j=0 AL0j01bi+j 0; wheni= 1
cT(I 0 AL)01 L01
j=0 AL0j01bi+j< 0; wheni= 01
(3)
fori = 0; 1; . . . ; L 0 1, inwhichi+j= (i+j)modL.
Proof: (Necessity) Iffx0; x1; . . .gis a periodic orbit with period
L, thendenote
i= si= sgn(cTxi)
fori = 0; 1; . . . ; L 0 1. Sincefx0; x1; . . .gis periodic with a period
L, we canobtain
xi= (I 0 AL)01 L01
j=0
AL0j01b i+j
fori = 0; 1; . . . ; L 0 1. Hence
cT(I 0 AL)01L01 j=0
AL0j01b
i+j= cTxi
which implies the conditions of the theorem. (Sufficiency) Denote
x(i)= (I 0 AL)01L01 j=0
AL0j01b
j+i (4)
and
f(x) = Ax + b sgn (cTx):
It is straightforward to verify that under the conditions of the theorem
f(i)(x(0)) = x(i)
fori = 0; 1; . . . ; L 0 1, an d
f(L)(x(0)) = x(0)
i.e., the orbit starting atx(0)has periodL.
A1-modulated system can have many periodic points. The first in-teresting result is the following.
Corollary 1:
i) If(A; b)is controllable, then there is ac 2 Rnsuch that the closed-loop system (1) and (2) hasn-periodic orbits.
ii) If(cT; A)is observable, thenthere is ab 2 Rnsuch that the closed-loop system (1) and (2) hasn-periodic orbits.
Proof: We prove i) only. Interested readers can work out the proof for ii) similarly.
The controllability of(A; b)implies [9] the existence of the inverse of
(An01b . . . Ab b)01:
Forn 1, we cantherefore choose
cT = (1; 0; . . . ; 0)(An01b . . . Ab b)01(I 0 An)
thenfor anybinarysequencefs0; s1; . . . ; sn01g
cT(I 0 An)01(An01bs
0+ 1 1 1 + Absn02+ bsn01) = s0:
The inequalities in (3) automatically hold. By Theorem 2, for this choice ofc, an ynbinary sequence gives rise to an orbit of periodn.
Choose a sequences0= 1; si= 01, fori = 1; . . . ; n01, according
to (4), the periodic orbit generated by it consists of the followingn points:
x(i) = (I 0 An)01n01 j=0
An0j01bs j+i:
We show that thesenpoints are different, therefore this orbit isn -pe-riodic.
To this end, we will prove thatx(0); x(1); . . . ; x(n01)are linearly independent. As a matter of fact, if we denote the following matrix:
0 =
1 01 1 1 1 01 01 1 1 1 1 01
. ..
01 01 1 1 1 1
thenit is routine to check that
x(0); x(n01); x(n02); . . . ; x(1) = (I 0 An)01(An01b 1 1 1 Ab b)0:
Forn 3; 0is invertible and one can derive
001= n03
2n04 02n041 1 1 1 02n041
0 1
2n04 2n04n03 1 1 1 02n041
. ..
0 1
2n04 02n041 1 1 1 2n04n03
:
Therefore,x(0); x(1); . . . ; x(n01)are linearly independent, and the proof is complete.
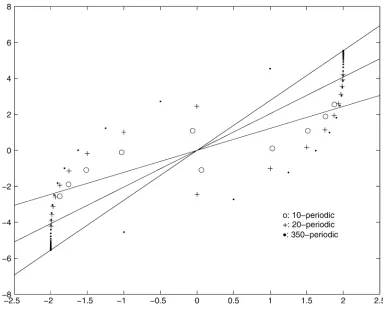
Of course, a1-modulated feedback system canhave periodic orbits with periods higher thanthe dimensionof the system. We use the fol-lowing two-dimensional (2-D) example to show that there can be very “large” periods.
Consider a 2-D system
x+
1 = 1x1+ sgn(cTx)
x+
2 = 2x2+ sgn(cTx)
wherej1j < 1; j2j < 1. Givenanyn, it canbe verified that the
following construction ofcgives a2n-periodic orbit:
cT = 1 0 n012 ((1 + n2) (1 0 2)) ;
0 1 0 n01
1 ((1 + n1) (1 0 1))
and the2n-periodic orbit starts from
((1 0 n
[image:3.612.46.558.95.295.2]1)/ ((1 + n1) (1 0 1)) ; (1 0 n2)/ ((1 + n2) (1 0 2))) :
Fig. 1 shows three orbits generated in this way for1= 0:5; 2 =
0:8196.
Criterion (3) is useful in deriving concrete results about the existence of periodic orbits of a certainorder.
Proposition 1:
i) System (1) under the1-modulationof (2) has a fixed (1-peri-odic) point if and only if
cT(I 0 A)01b 0:
ii) System (1) under the1-modulationof (2) has a 2-periodic orbit if and only if
cT(I + A)01b < 0:
iii) System (1) under the1-modulationof (2) has a 3-periodic orbit if and only if
2 maxfcT(I 0 A3)01b; cT(I 0 A3)01Abg
Fig. 1. 10-, 20-, and 350-periodic orbits.
iv) System (1) under the1-modulationof (2) has a 4-periodic orbit if and only if
2 max
0i2c
T(I 0 A4)01Aib < cT(I 0 A)01b 2cT(I 0 A4)01A3b
or
cT(I 0 A)01b > 2 maxfcT(I 0 A4)01(A + I)b
cT(I 0 A4)01(A2+ A)bg:
Proof: Item i) is a special case of (3) whenL = 1. To prove ii), note that the only 2-periodic binary sequence isf1; 01g(f01; 1gis regarded as equivalent tof1; 01g). By invoking (3), we have
cT(I 0 A2)01(A 0 I)b > 0
which is equivalent to
cT(I + A)01b < 0:
Similarly, for the case iii) the only 3-periodic binary sequence is
f1; 01; 01g. By invoking (3), we have
cT(I 0 A3)01(A20 A 0 I)b 0
cT(I 0 A3)01(A2+ A 0 I)b > 0
cT(I 0 A3)01(A20 A + I)b > 0:
These inequalities can be rewritten as stated in iii).
In item iv), there are only two 4-periodic binary sequences
f1; 01; 01; 01gandf1; 01; 01; 1g. Along similar lines, one can get the inequalities in iv).
III. POLYHEDRA ANDPERIODICITY
In this section, we study interesting properties of some polyhedra and their relationship to themaximal lengthof a periodic modulated
orbit. By the maximal length of a binary sequence, we mean the max-imal number of consecutive ones or minus ones. For example, the 4-pe-riodic sequencef1; 01; 01; 01g has a maximal length of 3, while
f1; 01; 01; 1ghas a maximal length of 2. Define
S+
0 = fx j cTx 0g
.. .
S+
k = S+k01\ fx j cTAkx
+ cT(Ak01+ Ak02+ 1 1 1 + A + I)b 0g
and, similarly
S0
0 = fx j cTx < 0g
.. .
S0
k = Sk010 \ fx j cTAkx
+ cT(Ak01+ Ak02+ 1 1 1 + A + I)b < 0g:
Lemma 1:
i) Fork = 1; 2; . . .
S+
k = fcTAx + cTb 0 j x 2 Sk01+ g
and
S0
k = fcTAx 0 cTb < 0 j x 2 Sk010 g:
ii) If for somek 0; Sk+1+ = Sk+(Sk+10 = Sk0), thenSj+ =
S+
k(Sj0= Sk0), forj k.
Proof: Item i) is implied by definition ofS+k andSk0.
IfSk+1+ = Sk+, thenby [2, Th. 4.7], there is anonnegativevector
p = (p0; p1; . . . ; pk01)T; pi 0, fori = 0; 1; . . . ; k 0 1, such that
cTAk= pT
cT
cTA
.. .
cTAk01
pT
0 cTb
.. .
cT(Ak03+ 1 1 1 + A + I)b
cT(Ak02+ 1 1 1 + A + I)b
cT(Ak01+ 1 1 1 + A + I)b:
It canbe easily verified that
cTAk+1= pT
cTA
cTA2
.. .
cTAk01
cTAk
= ~pT
cT
cTA
.. .
cTAk01
where
~pT = pk01p0; p0+ pk01p1; . . . ; pk03+ pk01pk02; pk02+ p2k01 :
Clearly,~pis a nonnegative vector. To proceed, note that
cT(Ak+ 1 1 1 + A + I)b
= cTAkb + cT(Ak01+ 1 1 1 + A + I)b
p0cTb + p1cTAb + 1 1 1 + pk01cTAk01b
+ p1cTb + 1 1 1 + pk01(cT(Ak02+ 1 1 1 + A + I)b)
= p0cTb + p1cT(A + I)b + 1 1 1
+ pk02(cT(Ak02+ 1 1 1 + A + I)b)
+ pk01(cT(Ak01+ 1 1 1 + A + I)b)
p0cTb + p1cT(A + I)b + 1 1 1
+ pk02(cT(Ak02+ 1 1 1 + A + I)b)
+ pk01p1cTb + pk01p2cT(A + I)b + 1 1 1
+ p2
k01(cT(Ak02+ 1 1 1 + A + I)b)
= ~pT
0 cTb
.. .
cT(Ak03+ 1 1 1 + A + I)b
cT(Ak02+ 1 1 1 + A + I)b
:
This, againby [2, Th. 4.7], proves thatS+k+2= Sk+. A mathematical induction argument shows thatSj+= Sk+, for allj k.
Following completely similar lines, we can prove the case forSk0. Then, we can define
S1+ = i
Si+
and
S0 1=
i
S0 i :
IfPis a polyhedron, denoteAP + bas
AP + b = fAx + b j x 2 P g:
By the definition of a polyhedron and [2, Cor. 2.5],AP + bis a poly-hedron.
Firstly, we have the following simple result.
Proposition 2: If the1-modulated system (1) and (2) has a fixed point, then
(AS0++ b) \ S1+ 6= ;:
Proof: When there is a fixed point, there is always a fixed point
xsatisfyingcTx 0. Infact, whenysatisfyingcTy < 0is a fixed point, theny = Ay 0 band, therefore,0y = A(0y) + b. So,0yis a fixed point inS0+.
It is theneasy to see that
x 2 AS+
0 + b \ S1+:
Proposition 3:
a) If there is a finite integerksuch thatSk+= ;, thenthe maximal length of any periodic modulated orbit is smaller thank. b) If there is a finite integerksuch that(AS0++ b) \ Sk0= ;, then
the maximal length of any periodic modulated orbit is smaller thank.
Proof:
i) By definition ofSk+, any orbit starting fromS0+canonly stay inS0+for at mostktimes. Also, by symmetry,Sk0= ;when
S+
k = ;. Therefore, any periodic modulated orbit cannot have
the same signfor more thanktimes.
ii) A periodic modulated orbit with a maximal length 1 corresponds to a fixed point (1-periodic). For any periodic orbit with a peri-odic greater than1, there are points inbothS0+andS00. Suppose
xis a periodic point inS+0 followed by a pointy = Ax + bin
S0
0. By assumption,y =2 S0k; ycannot be followed by more than
k 0 1points inS00. This proves that the maximal length of con-secutive minus ones is less thank. By symmetry, the maximal length of consecutive ones is also less thank.
IV. CONCLUDINGREMARKS
We have derived necessary and sufficient conditions for the exis-tence of periodic points of a finite-order arising from1-modulated con-trol along an arbitrary direction of a single-input, discrete-time, linear stable system. Some definite results about the existence of a certain order of periodic points are also obtained. The relationship between certainpolyhedra and the periodicity of the1-modulated orbit is also explored.
Some of the results can be extended to the multiple-input case and this is currently under investigation.
ACKNOWLEDGMENT
The authors would like to thank Prof. G. R. Chen for making refer-ence [17] available to them.
REFERENCES
[1] S. Ariyavisitakul and L. Chang, “Simulation of a CDMA system per-formance with feed-back power control,”Electron. Lett., vol. 27, pp. 2127–2128, 1991.
[2] D. Bertsimas and J. N. Tsitsiklis,Introduction to Linear Optimiza-tion. Belmont, MA: Athena Scientific, 1997.
[3] C. I. Byrnes and A. Isidori, “Local stabilization of minimum phase non-linear systems,”Syst. Control Lett., vol. 11, pp. 9–17, 1988.
[6] B. Hao, “Number of periodic orbits in continuous maps of the interval—Complete solution of the counting problem,”Ann. Combina-torics, vol. 4, pp. 339–346, 2000.
[7] P. Hartman, Ordinary Differential Equations, 2nd ed. New York: Wiley, 1973.
[8] M. Johansson and A. Rantzer, “Computation of piecewise quadratic Lya-punov functions for hybrid systems,”IEEE Trans. Automat. Contr., vol. 43, pp. 555–559, Apr. 1998.
[9] T. Kailath,Linear Systems. Upper Saddle River, NJ: Prentice-Hall, 1980.
[10] A. N. Sarkovskii, “Coexistence of cycle of a continuous map of a line into itself,”Ukr. Mat. Z., vol. 16, pp. 61–71, 1964.
[11] A. V. Savkinand A. S. Matveev, “Globally periodic behavior of switched flow networks with a cyclic switching policy,”Syst. Control Lett., vol. 38, pp. 151–155, 1999.
[12] A. J. Vander Schaft and J. M. Schumacher,An Introduction to Hybrid Dynamical Systems. Berlin, Germany: Springer-Verlag, 2000. [13] M. N. Vrahatis, “An efficient mehtod for computing periodic orbits of
nonlinear mappings,”J. Comput. Phys., vol. 119, pp. 105–119, 1995. [14] X. Xia, R. Gai, and G. Chen, “Periodic orbits arising from
delta-modu-lated feedback control,”Chaos, Solitons, Fractals, vol. 19, pp. 581–595, 2004.
[15] X. Xia and G. Chen, “On delta-modulated control: A simple system with complex dynamics,” Dept. Elect., Electro., Comput. Eng., Univ. Pretoria, Pretoria, South Africa, Tech. Rep., Oct. 2002.
[16] X. Yu, “Discretization effect on a sliding mode control system with bang-bang type switching,” Int. J. Bifurcation Chaos, vol. 8, pp. 1245–1257, June 1998.
[17] X. Yu and G. Chen, “Discretization behaviors of equivalent control based sliding mode control systems,”IEEE Trans. Automat. Contr., vol. 48, pp. 1641–1646, Sept. 2003.
A Gramian-Based Controller for Linear Periodic Systems
Pierre Montagnier and Raymond J. Spiteri
Abstract—This note proposes a new design method for the control of linear time-periodic systems. The method is based on the reachability Gramian and a specific form for the feedback gain matrix to build a novel control law for the closed-loop system. The new controller allows assignment of all the invariants of the system. Calculating the feedback requires solving a matrix integral equation for the periodic Floquet factor of the state-transition matrix of the closed-loop system.
Index Terms—Floquet, Gramian, invariant factors, periodic feedback, periodic systems.
I. INTRODUCTION
Linear time-invariant (LTI) systems are the most common way of analyzing engineering processes. Consequently, they have been exten-sively studied, and many different strategies have been developed over the years for their control. Yet, modeling real-world processes often
Manuscript received June 12, 2002; revised September 16, 2003 and April 19, 2004. Recommended by Associate Editor F. M. Callier. The work of P. Mon-tagnier was supported in part by NSERC under Strategic Project STR192 750. The work of R. J. Spiteri was supported by NSERC.
P. Montagnier is with the Centre for Intelligent Machines, McGill University, Montreal, QC H3A 2A7, Canada (e-mail: [email protected]).
R. Spiteri is with the Faculty of Computer Science, Dalhousie University, Halifax, NS B3H 1W5, Canada (e-mail: [email protected]).
Digital Object Identifier 10.1109/TAC.2004.832665
leads to a linear time-periodic (LTP) system; see, e.g., [1] and the ref-erences therein.
Unfortunately, results established for LTI systems do not usually hold for time-varying systems. LTP systems are an exception in that they all exhibit similar behavior, thus forming a unified class. More-over, several aspects of Floquet–Lyapunov theory for LTP systems have connections with LTI systems, raising the prospect of being able to take advantage of this well-established body of knowledge.
A. Notation and Definitions
Let ( n)[ m2=n]denote the real field (space of realn-vectors) [set of real matrices withmrows andncolumns], ( n)[ m2n] de-note the complex field (space of complexn-vectors) [set of complex matrices withmrows andncolumns], denote the setf1; 2; . . .g; I denote the identity matrix of ordern, and superscriptT (01)denote matrix transpose (inverse). Consider the continuous-time system de-scribed by the differential equation
_x(t) = A(t)x(t) + B(t)u(t) (1)
and its corresponding uncontrolled form
_x(t) = A(t)x(t) (2)
whereA( 1 ) 2 n2n; B( 1 ) 2 n2rare piecewise continuous,T -pe-riodic matrix functions. Denote by8(1; 0)the state-transition matrix (STM) of (2). The matrix8(T; 0)is called themonodromy matrix.
B. Floquet Theory
We give the main results and refer to [2] and [3] for a complete treat-ment. For 2 f ; gdefine the following set of matrix functions:
LT = fL( 1 ) : ! n2n:
L(0) = I; L(t + T ) = L(t); detL(t) 6= 0 8t L( 1 )absolutely continuous with
a piecewise-continuous derivativeg:
Theorem 1: (Representation Theorem) The STM8(1; 0)of system (2) canbe factored as
8(t; 0) = L(t) exp(tF); where L( 1 ) 2 LT; F 2 n2n: (3)
Theorem 2: (Reducibility) The Lyapunov transformationx(t) =
L(t)z(t)transforms the original LTP system into an LTI system_z(t) =
Fz(t), whereL( 1 )andFare the same as those in(3).
One disadvantage of Theorems 1 and 2 is that theFloquet factors
L(t)andFmay be complex evenif8(T; 0)is real. It is well known (see e.g., [4]) that it is always possible to obtainreal Floquet factors by treating (2) as having2T-periodic coefficients. However, in this case calculations must be made over two periods. Recently, [5] and [6] demonstrated how to obtain a real representation from computations performed on one period by generalizing a result from [3]. The two mainresults are reproduced as follows.
Theorem 3: Consider (2) and let8(1; 0)be its (real) state-transi-tionmatrix. LetY 2 n2nsuch that (i)Y8(T; 0)has a real loga-rithm; (ii)8k(T; 0) = [Y8(T; 0)]kfor some positive integerk. Then, for anyFY 2 n2nsatisfyingexp(T FY) = Y8(T; 0), the real