Article
1
Distributed orbit determination for Global
2
Navigation Satellite System with inter-satellite link
3
Yuanlan Wen 1*, Jun Zhu 2, Youxing Gong 3, Qian Wang1, Xiufeng He 1,*
4
1 School of Earth Sciences and Engineering, Hohai University, Nanjing 210098, China;
5
[email protected](Y.W.); [email protected](Q.W.); [email protected](X.H)
6
2 Xi’an Satellite Control Center, Xi’an 710043, China; [email protected] (J.Z)
7
3 Undergraduate School, National University of Defense Technology, Changsha 410073, China;
8
[email protected](Y.G)
9
* Correspondence: [email protected]; [email protected]; Tel.: +86-25-83786961
10
11
12
Abstract: To keep the global navigation satellite system functional during extreme conditions, it
13
is a trend to employ autonomous navigation technology with inter-satellite link. As in the newly
14
built BeiDou system (BDS-3) equipped with Ka-band inter-satellite links, every individual
15
satellite has the ability of communicating and measuring distances among each other. The system
16
also has less dependence on the ground stations and improved navigation performance. Because
17
of the huge amount of measurement data, centralized data processing algorithm for orbit
18
determination is suggested to be replaced by a distributed one in which each satellite in the
19
constellation is required to finish a partial computation task. In current paper, the balanced
20
extended Kalman filter algorithm for distributed orbit determination is proposed and compared
21
with whole-constellation centralized extended Kalman filter, iterative cascade extended Kalman
22
filter, and increasing measurement covariance extended Kalman filter. The proposed method
23
demands a lower computation power however yields results with a relatively good accuracy.
24
Keywords: Inter-satellite link; Whole-constellation centralized extended Kalman filter;
25
Distributed orbit determination; Iterative cascade extended Kalman filter; Increased
26
measurement covariance extended Kalman filter; Balanced extended Kalman filter
27
28
1. Introduction
29
For global navigation satellite system (GNSS),currently, the master control station (MCS)
30
collects the satellite to monitor station measurement data, estimates the satellite ephemeris and clock
31
offsets, and generates a time stream of navigation messages. The messages are then uploaded to
32
satellites by ground antennas to broadcast to the user community [1]. However, the MCS as well as
33
the other ground-based segments including monitor stations and ground antennas have the risk of
34
destruction during a warfare or natural disaster. This is the case especially for the monitor stations
35
which distributed globally for increasing the accuracy of satellite orbit determination [2]. In order to
36
enhance the viability of the satellite navigation systems under the potentially fatal conditions, as early
37
as in 1980s, the autonomous navigation techniques using inter-satellite link (ISL) measurements
38
without supports from the MCS were investigated for the global positioning system (GPS) [3]. If the
39
ISL measurement was the unique source for orbit determination and time synchronization, the datum
40
mark would be insufficient [4]. This problem can be addressed by setting up a few ground anchorage
41
stations (GASs) which provide reference coordinate system and time system [5]. Combining both the
42
ISL and satellite-to-GAS measurements, the autonomous navigation system has several features:
43
firstly, the data processing will be completed by satellite onboard computers rather than the MCS;
44
secondly, the GASs can be considered as pseudo-satellites; and finally, the globally allocated monitor
45
stations can be replaced by a few domestic GASs [3].
46
Centralized data processing technique, which is widely applied in current autonomous
47
navigation constellation, collects the ISL and satellite-to-GAS measurement data, combines all the
48
satellite state vectors (including satellite orbit, clock error parameters, etc.) into one matrix, and
49
computes the optimal state vector for each satellite by a central satellite on-board computer. As
50
results, the associated state vector covariance matrix could be very large, the method requires a vast
51
computation power [6]. It is worth to mention that, in this case, every satellite is observed indirectly
52
by other satellites.
53
Whereas in distributed data processing algorithm, the computation is broken down and assigned
54
to each satellite. Each satellite is required to deal with self-related ISL measurements and local state
55
vectors. In this way, the number of measurement equations and dimension of the state vectors are
56
reduced. As a result, the computational amount of the whole system are decreased considerably.
57
Moreover, the accuracy of the orbit ephemeris and clock offsets calculated by distributed data
58
processing method could have the same level to the results of centralized data processing.
59
With the measurements from ISLs and satellite-to-GASs, the autonomous navigation
60
constellation constitutes an extremely complex system. Each satellite has to finish the task of ISL
61
measurement, data processing, and communicating. A practical algorithm for autonomous orbit
62
determination is still under development. Based on the method of iterative cascade extended Kalman
63
filter (ICEKF) and increased measurement covariance extended Kalman filter (IMCEKF), a new
64
distributed method, balanced extended Kalman filter (BEKF), is proposed in this paper. Together
65
with whole-constellation centralized extended Kalman filter (WCCEFK), four different autonomous
66
navigation algorithms are conducted in simulations for comparisons of accuracy and computation
67
loads.
68
2. Overview of Orbit Determination Algorithms
69
Ananda [7] proposed the framework of autonomous navigation system without a MCS at the
70
first time and validated the system by simulations. Rajan [3] introduced various autonomous
71
navigation algorithms and presented preliminary on-orbit experiment results.
72
In the designing of the GPS Block IIR, the ISLs, programmable microprocessors, and redundant
73
management were carried out. The following two major features are critical to ensure high precision
74
autonomous navigation [3, 7]:
75
The ISL communications and measurements in UHF band.
76
A high-precision autonomous navigation algorithm which is adapted to the computing
77
capacity of the satellite on-board computers;
78
A time division multiple access (TDMA) system, which has two frames, was employed for
79
ranging and data transmission. In ranging frame, each satellite is assigned a 1.5-second slot to make
80
pseudo-range (PR) measurements with the visible satellites. Two frequencies were used in the
81
measurement for ionospheric delay corrections. In data frame, a 1.5-second slot was appointed to
82
each satellite to transmit data includes the PR measurements, the estimated satellite state vector, and
83
the associated covariance matrix to all visible satellites.
84
The GPS Block IIF follows the design of the GPS Block IIR and improves the performance of ISL
85
measurements and on-board data processing. Without contacting with the ground system, Block IIF
86
can operate about 60 days in the autonomous navigation mode and provide navigation messages
87
which are corrected by ISL measurements with a 3-meter user range error (URE) (URE is a root mean
88
square value and does not consider the impact of the polar motion and UT1). However, it is difficult
89
to establish a precise prediction system because of the irregular polar motion and uncertain UT1.
90
Therefore, in autonomous navigation mode, the URE is far greater than 3 meters in a 60-day duration
91
[8].
92
For the GPS III, each satellite in the constellation will have the ability of ISL measurements and
93
communications. It is designed that once there are enough number of satellites in orbit, the GPS
94
constellation will be able to operate autonomously in wartime, but currently they are still under
95
investigation [9].
Galileo navigation system is also planned to employ autonomous navigation algorithm based
97
on ISLs [10]. Spatial orientation problem is solved by the combination of the ISL and
satellite-to-98
ground measurements. The simulation for Galileo system showed that URE is on the level of
99
decimeters [10], which is better than that of GPS.
100
For the distributed navigation algorithms, several techniques including iterative cascade
101
extended Kalman filter (ICEKF), increased measurement covariance EKF (IMCEKF), and
Schmidt-102
Kalman Filter (SKF) are discussed by Schmidt, Park and Ferguson [11-13]. The ICEKF is employed to
103
processes a large number of space-borne GPS measurement data and a small quantity of ISL
104
measurement data for low-Earth orbit formation flying satellites. In this method, the computation
105
process will iterate for 3 to 4 times for convergence and a good orbit accuracy is presented. For the
106
method of IMCEKF, amendments are made based on ICEKF and it presents a better performance. On
107
the other hand, the SKF yield results with a less accuracy compared to IMCEKF while processing the
108
GNSS ISL measurement data [4]. Recently, International Association of Geodesy (IAG) initiates a GPS
109
Dancer project which develops a distributed data processing algorithm to analyze the precision of
110
the GPS [14].
111
In China, distributed orbit determination and time synchronization algorithms based on ISL
112
measurements were studied [15-21]. The distributed autonomous ephemeris updating were
113
discussed for navigation satellites [22]. There are also many researches on developing higher
114
precision orbit determination methods for new BeiDou (BDS-3) experimental satellites in the
115
literature [23-26]. Currently, the developments for autonomous orbit determination, time
116
synchronization, and autonomous operation and management are wildly investigated. More
117
progress on designing an efficient distributed data processing algorithm, however, needs to be made.
118
3. Fundamental Equations for Measurement and Motion
119
3.1. Equations for Measurement
120
The position vectors,
r
i=
[
x
iy
iz
i]
T, velocity vectors,v
i=
[
v
xiv
iyv
iz]
T, and dynamic121
parameter vector,
x
iD,
consititue the state vector which need to be estimated:122
T i iT iT i T
D
v
x
=
X
r
(1)123
In here, the superscript, T, denotes the transpose of a matrix, and the superscript, i, denotes that it is
124
for the ith satellite. The reference values for the state vector are stored in
X
i*, and the improving125
values for the state vector are written in:
126
*
i i i
δ
x = X
−
X
(2)127
After correcting the hardware delay, ionospheric delay, relativistic effect, multi-path effect, and
128
the antenna phase center offset [4], two one-way ISL PRs between the ith satellite and jth satellite need
129
to be translated into a same measurement epoch (e.g. ranging frame epoch t). The PR equations are:
130
( )
[
( )
( )]
(
( ),
( ))
( )
i j
t
c
t t
jt t
id
jt
it
i jt
ρ
→= ⋅ δ
− δ
+
X
X
+
ε
→(3)
131
( )
[
( )
( )]
(
( ),
( ))
( )
j i
t
c
t t
it t
jd
jt
it
j it
ρ
→= ⋅ δ
− δ
+
X
X
+
ε
→ (4)132
where, c is the speed of light,
δ
t t
i( )
andδ
t t
j( )
are clock errors for the ith satellite and the jth satellite,133
( )
i j
t
ε
→ andε
j i→( )
t
are the measurement errors,d
(
X
j( ),
t
X
i( ))
t
=
134
2 2 2
( i j) ( i j) ( i j)
x −x + y −y + z −z is the geometric distance between the two satellites.
135
Combining equations (3) and (4), distance measurement equation that only contains orbit parameter
136
is derived as:
( )
( )
( ) 2
(
( ),
( ))
( )
ij
t
j it
i jt
d
jt
jt
ijt
ρ
=
ρ
→+
ρ
→
=
+
ε
X
X
(5)138
where,
ε
ij( ) [
t
k=
ε
i→j( )
t
k+
ε
j i→( )] / 2
t
k . Subtracting equation (4) from equation (3), time139
measurement equation that only contains clock error parameters is deduced as:
140
( )
( )
( ) 2
[
( )
( )]
( )
( ) 2
ij j i i j j i j i i j
clock
t
t
t
c
t t
t t
t
t
ρ
=
ρ
→−
ρ
→
= ⋅ δ
− δ
+
ε
→−
ε
→
(6)141
Following the steps above, the distance measurements and the clock bias measurements are
142
decoupled, the orbit ephemeris and clock offsets can therefore be estimated independently.
143
Linearizing equation (5) with Taylor expansion at the reference state vector
X
i*andX
j* yields:144
(
)
* *
* *
( )
( )
( )
,
( )
j i
ij ij
ij i j i j ij
i j
t
t
t
d
ρ
x
ρ
x
t
ρ
=
+
δ
+
δ
+ +
ε
∂
X∂
X
X X
X
X
(7)145
After that, equation (7) is converted into a linear measurement equation:
146
( )
( )
( )
( )
ij i i j j ij
z t
=
H x
δ
t
+
H x
δ
t
+
ε
t
(8)147
where
z t
ij( )
=
ρ
ij( )
t
−
d
(
X
i*,
X
j*)
is the innovation,
H
i andH
j are the measurement148
matrices.
149
(
) (
) (
)
*
*
* * * * * *
( )
,
,
,
i
i
ij i j i j i j
i
i i j i j i j
t
x
x
y
y
z
z
H
d
d
d
ρ
−
−
−
=
=
∂
X
X
X
X
X
X
X
X
X(9)
150
*
( )
-j ij
j i
j
t
H
=
ρ
=
H
∂
X
X (10)151
Similarly, GAS can be considered as a pseudo-satellite. The PR needs to be corrected by an extra
152
tropospheric delay compared to a normal satellite. Distance measurement equation that contains
153
orbit parameters between gth GAS and ith satellite is derived as
154
( )
( )
( ) 2
(
( ),
( ))
( )
ig
t
g it
i gt
d
it
gt
igt
ρ
=
ρ
→+
ρ
→
=
+
ε
X
X
(11)155
In the equation (11) , the array of state parameters of GAS
X
g( )
t
is known, only the state vector156
of ith satellite is unknown. The reference ground coordinate is hence introduced into the satellite state
157
by equation (11), this overcomes the lack of the datum mark in data processing while only ISL
158
measurements are utilized. The current linearized measurement equation which is similar to
159
equation (8) becomes:
160
( )
( )
( )
ig i i ig
z t
=
H x
δ
t
+
ε
t
(12)161
3.2. Equations for Motion
162
Satellites can be affected by a variety of factors when operated in orbit. For navigation satellites
163
in here, only the gravitational forces, solar radiation pressure, and relativistic effects are considered
164
[27]. The gravitational forces include the attractions from the earth, the moon, and other planets in
165
the solar system. The dynamic equation for the ith satellite can be written as:
166
c
( )
(
,
)
i
t
=
f
i i
X
X w
(13)where
f
c is a continuous function,w
iis the system disturbances that has the following properties:168
T
( )
( )
0,
( )( ( ))
0
i
i i i
t
t
E
t
E
t
t
τ
τ
τ
=
=
=
≠
Q
w
w
w
(14)169
[ ]
E
⋅
denotes the expected value andQ
i( )
t
is a covariance matrix which is symmetric, non-negative,170
and definite. In here, the system disturbances are simulated by Gaussian white noise. Because the
171
continuous function
f
c and the system disturbancew
iis not coupled with each other, Equation (13)172
can be written as:
173
c
( )
(
( ))
i
t
=
it
+
i
X
X
Gw
(15)174
in which G =
[
0 I 0]
T is coefficient matrix, and theI
is the identity matrix, the 0 is the zero175
matrix. Equation (15) is then linearized by Taylor expansion at the reference state vector
X
i* as:176
*
c
c *
(
)
*( )
(
( ))
(
( )
( ))
i i
i i i i i
i
t
=
t
+
∂
t
−
t
+ +
∂
X
X
X
X
X
X
Gw
X
(16)177
From equation above, the state increments are then derived as:
178
( )
( )
( )
i
t
t
it
iδ
x
=
F
δ
x
+
Gw
(17)179
where
δ =
x
X
−
c(
X
i*( ))
t
andF
( )
t
is the dynamic partial derivative matrix[6]:180
*
*
c c c c
D
|
0
0
( )
( )
0
0
t
∂
∂
∂
∂
=
∂
∂
∂
∂
=
XX
I
X
F
X
r
r
p
0
(18)
181
The equation (17) is the state equation of the stochastic linear continuous systems and its general
182
solution is:
183
0
0 0
( )
( , )
( )
t( , ) ( )d
i i i i i
t
t
t t
t
t
τ
τ τ
δ
x
=
Φ
δ
x
+
G
Φ
w
(19)184
in which,
Φ
i( , )
t t
0 is the system state transition matrix and is the solution of the following equations:185
0 0 0 0
( , )
( )
( , ),
( , )
i
t t
=
t
it t
it t
=
Φ
F
Φ
Φ
I
(20)186
where
I
is the identity matrix with the same dimensions as dynamics matrix,F
( )
t
.187
The state transition matrix
Φ
i( , )
t t
0 has the following features:188
1
0 0
( , )
( , )
( , ),
( , )
( , )
i
t
τ
iτ
t
=
it t
it
τ
−=
iτ
t
Φ
Φ
Φ
Φ
Φ
(21)189
In the actual computation process, discretization needs to be implemented for equation (19):
190
1
1 1 1
( ,
)
k( , )
( )d
k t
i i i i i
k
t t
k k k tt
kτ
kτ τ
−
− − −
δ =
x
Φ
δ
x
+
G
Φ
w
(22)191
In a sampling interval from
t
k−1 tot
k, the white noisew
ik−1( )
τ
can be considered as a constant.192
The integral coefficient denotes that:
193
1
=
k( , )d
k t i
k t
t
kτ τ
−
G G
Φ
(23)For simplicity, the white noise will be denoted as 1 i k−
w
in the following paper. Then the195
discretized state equation derived from equation (22) is:
196
1 1 1
i i i i i
k k− k− k k−
δ =
x
Φ
δ
x
+
G w
(24)197
In which,
Φ
k−i 1denotes the state transition matrix fromt
k−1 tot
k. According to equation (24), the198
predicted state covariance matrix is
199
i T i T 1
ˆ
1 1 1 1 1i i i i i
k
=
k− k− k−+
k− k− k−P
Φ
P
Φ
G Q G
(25)200
4. Whole-Constellation Centralized Extended Kalman Filter
201
The whole-constellation centralized extended Kalman filter (WCCEKF) is one of the centralized
202
data processing method. According to this method, a main satellite and a back-up satellite are
203
assigned to complete the task of data processing. The other satellites in the constellation need to send
204
their measurement data, state vectors and corresponding covariance matrices to the main satellite for
205
orbit determinations.
206
For all the satellites in the constellation, the states and corresponding improving values from
207
equations (1) and (2) are collected and stored in a state vector
X
kand an improving values vector208
k
δ
x
[6, 28]
:209
T
1T 2 T i T n T
k
=
( ) ( )
( )
( )
X
X
X
X
X
(26)210
T
1 T 2 T i T n T
k k k k k
δ
x
=
(
δ
x
) (
δ
x
)
(
δ
x
)
(
δ
x
)
(27)211
where n is the number of satellites in the system. In this way, the state equation for all the satellites
212
can be obtained through Equation (24):
213
1 1 1
k k− k− k k−
δ =
x
Φ
δ
x
+
G w
(28)214
State transition matrix
Φ
k and integral coefficient matrixG
k are diagonal matrices and can be215
expressed as:
216
1 2
1 1 1 1 1
i n
k− =diagonal( k−)( k−) ( k−) ( k−)
Φ Φ Φ Φ Φ (29)
217
1 2 i n T
k =diagonal( k)( k) ( k) ( k)
G G G G G (30)
218
State noise vector,
w
k−1, stores the noise for
all the satellites in the constellation:219
T
1 2
1 1 1 1 1
i n
k k k k k
w
−=
(
w
−)(
w
−)
(
w
−)
(
w
−)
(31)
220
and it has the statistical characteristics as follows:
221
1 1 0, 1( 1)
0
i
i j T k
k k k
i j
E E
i j
− − − −
=
= =
≠
Q
w w w (32)
222
1 2
1 1 1 1 1 1 1
T i n
k k k k k k k
Ew w− − =Q − =diagonalQ − Q − Q − Q − (33)
223
The measurement equation which is a combination of equations (8) and (12) is then derived as:
224
k k k
z
=
H x +
δ
ε
(34)225
where
H =
k[
0
(
H
i)
T
0
(
H
j)
T
0
]
T,z
k=
z t
ijk( )
k ,ε
k=
ε
ij( )
t
k for ith satellite and jth226
satellite with ISL;
H =
k[0
(
H
i)
T
0]
T,z
k=
z t
kig( )
k ,ε
k=
ε
ig( )
t
k for GAS to ith satellitemeasurement. Next, a measurement covariance matrix
R
k=
E(
ε ε
k kT)
,
an initial state vector228
* 0
=
E(
0)
X
X
and an initial state vector covarianceP
0=
E[
X X
0* 0*T]
are defined. Finally, the method229
of WCCEKF that combines the satellite-to-satellite measurements and satellite-to-GAS
230
measurements can be expressed as [29]:
231
T T
1
ˆ
1 1 1 1 1 k=
k− k− k−+
k− k− k−P
Φ
P
Φ
G Q G
(35)232
(
)
1 T T
k k k k k k k
−
=
+
K
P H H P H
R
(36)
233
ˆ
k k kx
z
δ
=
K
(37)234
ˆ
X
k=
X
k+
δ
x
ˆ
kX
ˆ
k=
X
k+
δ
x
ˆ
k(38)
235
(
)
ˆ
k
=
−
k k kP
I K H P
(39)236
The dimension of state vector
X
kis237
1
6 n i
W
i
N n D
=
= +
å
(40)238
where Diis the number of dynamic parameters for the ith satellite.
239
In the method of WCCEKF, each satellite is correlated with the other satellites through the state
240
vector covariance matrix which has the dimension of
N
W´
N
W . What is more, matrix241
T
(
H P H
k k k+
R
k)
with the dimension ofm m
´
(m
is the dimension of the measurement vector)242
needs to be inversed during the process and a huge computational amount is expected. The
243
computation amount for a process of WCCEKF is:
244
2 2
4
N
W(
N
W− +
1) (
N
W−
1)
N
W(
N
W+
1) / 6
+
(2
2+7
1)
W W
N
N
+ ×
m
(41)245
If the WCCEKF algorithm is employed, the on-board computer of the main satellite would need
246
to process all the ISL measurement and satellite-to-GAS measurement data to finish the task of orbit
247
determination and navigation message generation for satellites in the constellation. Due to the huge
248
computation amount and great complexity of communication, WCCEKF is difficult to be
249
implemented in a satellite constellation with limited on-board computation ability.
250
In addition, the WCCEKF is also vulnerable. Once the main satellite and its backup satellite
251
failed, the entire navigation constellation would stop working. To avoid the drawbacks in the
252
WCCEKF method, many researches nowadays are focusing on developing the distributed data
253
processing algorithm.
254
5. Distributed Orbit Determination
255
For the distributed orbit determination algorithms based on the ISL, data processing is assigned
256
to each satellite. In this process, each satellite collects the ISLs measurement data with respect to its
257
visible satellite and estimates the self-related state vectors.
258
5.1. Reduced-Order Iterative Cascade EKF
For ith and jth satellites with ISL measurements, the iterative cascade EKF (ICEKF) [12] assumes
260
that the state vector
X
j of jth satellite is known. Thus, the measurement equation which is similar to261
equation (34) is derived as:
262
i i i i
k k k k
z
=
H x +
δ
ε
(42)263
For ISL measurement, the innovation is
z
ik=
z t
ijk( )
k , the measurement error is264
( )
i j j ij
k k k
t
kε
=
H x
δ
+
ε
and measurement covariance matrix is265
,
[ ( ) ]
[ ( ) ( ) ]
i i i T ij ij T i
k k k k k k ISL
R
=
E
ε ε
=
E
ε
t
ε
t
=
R
. F
or satellite-to-GAS measurement, the innovation is266
k
( )
i ig k k
z
=
z t
, the measurement error isε
ki=
ε
ig( )
t
k , and measurement covariance matrix is267
,
( ( ) ]
(
( )
( ) ]
i i i T ig ig T i
k k k k k k GAS
R
=
E
ε ε
=
E
ε
t
ε
t
=
R
. An initial state vector 0E(
0*)
i=
iX
X
and an initial268
state vector covariance matrix
P
0i=
E[
X X
0i* 0i*T]
are defined. Result from the method of ICEKF that269
combines the ISL measurement and satellite-to-GAS measurement can be obtained as:
270
i T i T 1
ˆ
1 1 1 1 1i i i i i
k
=
k− k− k−+
k− k− k−P
Φ
P
Φ
G Q G
(43)271
(
)
1i T i T i
i i i i
k k k k k k k
−
=
+
K
P H
H P H
R
(44)272
ˆ
i i i k k kx
z
δ
=
K
(45)273
ˆ
i iˆ
ik
=
k+
δ
x
kX
X
(46)
274
(
)
ˆi i i i
k = − k k k
P I K H P (47)
275
In this way, only local state vector related to the ith satellite itself is included in the measurement
276
equation. The dimension of state vector
X
kiis:277
6
i iN
= +
D
(48)278
The computation amount for ICEKF algorithm is:
279
2 2
4
N N
i(
i− +
1) (
N
i−
1)
N N
i(
i+
1) / 6
+(2
N
i2+7
N
i+ ×
1) ( / )
m n
(49)280
As a result, the computational complexity is greatly reduced. However, the state vector of the ith
281
satellite is only correlated with the measurement of itself and this method must be referred to as a
282
reduced-order suboptimal filter. In order to improve the filtering accuracy, a common approach is to
283
iterate the process above till convergence. In a data frame, after receiving the state vectors of the other
284
visible satellites, the ith satellite will update its own state vectors and covariance matrix by equations
285
(42)~(47). Other satellites will do the same process in turn and iterate until the state vector of each
286
satellite is converged.
287
However, the method of ICEKF assumes that the state vectors of the other satellites have no
288
errors, but this is not the case. In such way, the method of ICEKF needs an uncertain number of
289
iterations to approach convergence. In a constellation with large number of satellites, reaching
290
convergence could be time-consuming [12, 13].
291
5.2. Reduced-Order Increased Measurement Covariance EKF
To accelerate the data-processing in the ICEKF method, the reduced-order increased
293
measurement covariance EKF (IMCEFK) [12] is carried out. This method includes the error of the
294
state vectors of the jth satellite into the measurement covariance matrix i
k
R
between ith satellite and jth295
satellite. Let us regenerate the ISL measurement errorin equation (42) as
ε
ki=
H x
jδ
kj+
ε
ij( )
t
k , then296
the corresponding measurement covariance matrix is:
297
T T
j j jT
E
i iE (
j j ij( ))(
j j ij( ))
k k k k k k k k
i k k k k
t
t
R
ε ε
δ
ε
δ
ε
=
+
+
+
=
H
x
H
x
H P H
(50)
298
in which
P
kj is the state vector covariance matrix of jth satellite. Equation (50) implies that ISL299
measurements contains not only the measurement errors, but also the jth satellite state vector error,
300
thus the measurement covariance matrix is assembled as:
301
j j jT
i i
k assembled k k k k
R
=
H P H
+
R
(51)302
the subscripts, assembled, indicates that it is an assembled measurement covariance matrix.
303
Next, the
R
kiin equation (44) is replaced byR
k ampi , and the gain matrix becomes304
(
)
1i T i T i j jT
i i i j i
k k k k k k k k k k
−
K = P H
H P H + H P H + R
(52)305
After repeating the steps in equations (42), (43), (51), (45), (46), and (47), the orbits for ith
306
satellites are determined. In this way, a reduction of the number of the iterations is expected. The
307
computation amount of IMCEKF is:
308
2 2
4
N N
i(
i− +
1) (
N
i−
1)
N N
i(
i+
1) / 6
+
(2
2+7
1) ( / )
i iN
N
+ ×
m n
(53)309
In some situations, iteration may not be required [18]. To summarize, compared to ICEKF, the
310
IMCEKF is a reduced-order approach and needs to transmit not only the local state vector but also
311
its covariance matrix to the other satellites.
312
5.3. Balanced Extended Kalman Filter
313
In one computation cycle, the ICEKF and IMCEKF algorithm only improve the state vector on one
314
end of the ISL. To increase the efficiency and accuracy, the balanced extended Kalman filter (BEKF)
315
is proposed. For ith and jth satellite, the satellites state vectors on the both ends of the ISL can be
316
improved simultaneously. To keep the balance of the accuracy increments on both satellites, the
317
improving state vectors should be adjusted by:
318
( )
-1( )
-1ˆ
=
ˆ
i i j j
k
δ
x
k kδ
x
kP
P
(54)319
With the constraint of the equation (54), the BEKF can be derived from equations (8), (12) and (24),
320
and it can be completed by following steps:
321
P
ki=
Φ
ki−1P
ˆ
ki−1Φ
ki T−1+
G Q G
ki−1 ki−1 ki T−1 (55)322
j T j T 1
ˆ
1 1 1 1 1j j j j i
k
=
k− k− k−+
k− k− k−P
Φ
P
Φ
G Q G
(56)323
( )
( )
11 1
1
1 1
i i i i T j
k k k k k
B
jT i jT j j
k k k k k
H R H
H R H
N
H R H
H R H
−
− −
−
− −
+
=
+
P
P
(57)( )
i 1( )
j 1k k
C
=
−−
−
P
P
(58)325
1 T
C B
N
=
CN C
−(59)
326
1 T 1
C B C
M
=
N C N C
− −(60)
327
i T
1
i i T T
j T
(
)
i k k
ij i j j j i
k j k k k k k k k
k k
I M
−= −
+
P H
K
H P H
H P H
+ R
P H
(61)328
(62)
329
ˆ
ˆ
i
k i
k k j
k
x
z
x
δ
δ
=
K
(63)330
ˆ
ˆ
ˆ
ˆ
i i i
k k k
j j
j
k k
k
x
x
δ
δ
=
+
X
X
X
X
(64)331
{
i j}
ˆ
ˆ
0
0
ˆ
ˆ
0
0
i ij i i
k k k k
K k k j j
ji j
k k
k k
I K
M
= −
−
P
P
P
P
H
H
P
P
P
P
(65)332
The dimension of state vector
X
kiandX
kj of ith and jth satellites is333
1
12 n i+ j
ij
i
N D D
=
= +
( ) (66)334
The computation amount of BEKF is:
335
2 2
4
N N
i(
i− +
1) (
N
i−
1)
N N
i(
i+
1) / 6
+
(2 2+7 1) ( / 2 )ij ij
N N + × m n
(67)
336
The method has the following features:
337
(1) The method of BEKF collects the data of ISL measurements, satellite-to-GAS
338
measurements (if it is available), and the satellite state vectors and their covariance
339
matrices on both ends of the ISL. After the calculation of the BEKF algorithm, the
340
improved state vectors and their covariance matrices are sent to the other visible satellites.
341
The BEKF method modifies the denominator of gain matrix from
K
kij to342
i i i T j j jT i k k k + k k k k
H P H H P H + R which is similar to the method of IMCEKF. Furthermore, it
343
modifies the gain matrix by a factor of
(
I M
−
C)
. Therefore, the BEKF algorithm is344
expected to yield results with higher precision.
345
(2) It seems that BEKF requires more ISL processes than the other EKFs. In fact, the state
346
vectors and their covariance matrices on both ends are improved at the same time. It is
347
unnecessary to repeat the ISL process for the same two satellites. The computation load of
348
BEKF is similar to that of IMCEKF.
349
(3) Iteration process that is implemented in the ICEFK algorithm is not required in the BEKF
350
method to achieve high accuracy.
(4) The improving state vectors are balanced in such that the satellite with lower state
352
precision will have more increments on the accuracy while the satellite with higher state
353
precision will have less adjustments.
354
(5) Compared to the other EKFs, in equation (65), the state vectors covariance matrices of the
355
two satellites are subtracted with 0 0
i k
C j
k M
P
P . Therefore, the values in the matrices are
356
reduces and the accuracy of the state vectors is improved.
357
(6) The two satellites are correlated by
P
ˆ
kij andP
ˆ
kji in equation (65), however, these two358
matrices have to be ignored in this distributed filter. As a result, the current method
359
should be categorized as a reduced-order sub-optimal orbit determination method.
360
6. Simulations and Analyses
361
In order to compare the performance of abovementioned methods, navigation constellation
362
simulations are carried out with the parameters of Walker 24/3/2:55°, 22116 kilometers [30]. The
363
dynamic model applied to satellite orbit are:
364
1) The earth’s gravitational effects of 70
×
70,365
2) The lunar, solar and other planetary gravitational perturbations,
366
3) The solar radiation pressure,
367
4) The other general relativistic forces.
368
The eighth-order Runge-Kutta method is employed for orbit integration. IERS96 model is
369
adopted for the Earth Orientation Parameters [31]. Besides, TDMA mode is adopted in ISL with
370
measurement frames and data transmitting frames. The total error of Ka-band ISL PR is 0.5 meters (1
371
σ
). To avoid ground atmospheric disturbance, the ISLs with a vertical distance less than 1000372
kilometers to the Earth surface are not considered. Eight GASs that are located in Xiamen, Kashi,
373
Beijing, Lhasa, Sanya, Urumqi, Jiamusi, and Xi'an in China are set up in the simulation. With a
374
minimum elevation of 10°, the Hopfield / Marini model [1] is employed in tropospheric delay
375
correction for the satellite-to-GAS PR which has a total error of 3 meters (1
σ
).376
The impact of complex factors is not considered in the simulations. In addition, the ISL PR
377
measurement noise is assumed to be normally distributed without pollution to have better
378
comparisons for the different algorithms.
379
The orbit determination simulations are carried out in two steps:
380
(1) An analytical orbit is generated and the corresponding ISL and satellite-to-GAS PRs are
381
calculated.
382
(2) Using the abovementioned PRs, the satellite orbits are calculated by the different methods and
383
compared with the analytical orbit to find out orbit determination precisions.
384
The position error, radial error, along track error, and cross track error versus time normalized
385
by day for satellite SV-01 computed from different methods are presented in Figure 1 to Figure 4. It
386
should be noted that errors from the other satellites in the constellation are excluded in present
387
analysis since the errors are similar to that of satellite SV-01.
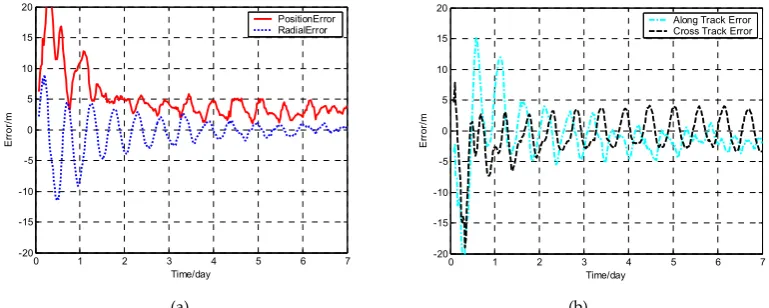
389
(a) (b) Figure 1. Orbit determination errors of SV-01 by WCCEKF algorithm
390
(a) (b) Figure 2. Orbit determination errors of SV-01 by ICEKF algorithm
391
(a) (b) Figure 3. Orbit determination errors of SV-01 by IMCEKF algorithm
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
PositionError RadialError
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
Along Track Error Cross Track Error
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
PositionError RadialError
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
Along Track Error Cross Track Error
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
PositionError RadialError
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
(a) (b)
Figure 4. Orbit determination errors of SV-01 by BEKF algorithm
For each method, the orbit determination errors tend to oscillate steadily after poor initial results.
392
However, differences can be observed among four algorithms. To have quantitative comparisons,
393
the root mean square (RMS) of different errors from each method is calculated in stable section. The
394
average RMS for position error, radial error, along-track error, and cross track error from the four
395
methods are shown in Figure 5. It is worth to point out that the average RMS of position error for
396
WCCEKF, ICEKF, IMCEKF, and BEKF algorithms is around 1.6 meters, 4.5 meters, 2.9 meters, and
397
1.9 meters, respectively.
398
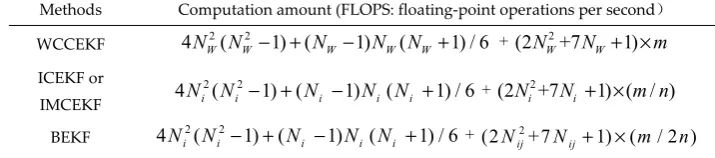
Next, the computation amounts for different methods are summarized in Table 1 and visualized
399
in Figure 6.
400
401
Figure 5. Average RMS of orbit errors
402
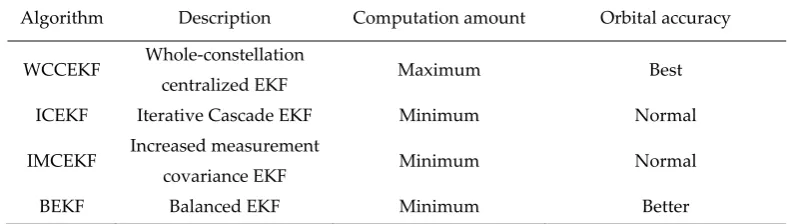
Table 1. Computation amounts, unit: FLOPS ( floating-point operations per second)
403
Methods Computation amount (FLOPS: floating-point operations per second)
WCCEKF 4NW2(NW2 − +1) (NW −1)NW(NW +1) / 6 +
2
(2NW+7NW+ ×1) m
ICEKF or IMCEKF
2 2
4N Ni ( i − +1) (Ni −1)N Ni( i +1) / 6 + (2 2+7 1) ( / )
i i
N N + × m n
BEKF 4N Ni2( i2− +1) (Ni −1)N Ni( i +1) / 6 +
2
(2Nij+7Nij+ ×1) ( / 2 )m n
404
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
E
rro
r/
m
PositionError RadialError
0 1 2 3 4 5 6 7 -20
-15 -10 -5 0 5 10 15 20
Time/day
Er
ro
r/
m
Along Track Error Cross Track Error
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Position Radial Along Trcak Cross Track
RM
S
/
m