Procedia Computer Science 22 ( 2013 ) 162 – 171
1877-0509 © 2013 The Authors. Published by Elsevier B.V. Selection and peer-review under responsibility of KES International doi: 10.1016/j.procs.2013.09.092
ScienceDirect
17
thInternational Conference in Knowledge Based and Intelligent Information and
Engineering Systems - KES2013
Hierarchical Multiobjective Fuzzy Random Linear Programming
Problems
Hitoshi Yano
a, Kota Matsui
baGraduate School of Humanities and Social Sciences, Nagoya City University,Nagoya, 467-8501, Japan
bDepartment of Computer Science and Mathematical Informatics, Graduate School of Information Science, Nagoya University, Nagoya,
464-8601, Japan
Abstract
In this paper, we propose an interactive decision making method for hierarchical multiobjective fuzzy random linear pro-gramming problems (HMOFRLP), in which multiple decision makers in a hierarchical organization have their own multiple objective linear functions with fuzzy random variable coefficients. To adress HMOFRLP, it is assumed that each decision maker has fuzzy goals for permissible probability levels in a fractile optimization model. Through a fuzzy decision, two types of membership functions of the original objective functions and the corresponding permissible probability levels are integrated, and a Pareto optimal solution concept is defined. A satisfactory solution is obtained from among a Pareto optimal solution set through the interaction with the decision makers, in which the hierarchical decision structure is reflected through the decision powers.
c
2013 The Authors. Published by Elsevier B.V.
Selection and peer-review under responsibility of KES International.
Keywords: fuzzy random variable; a fractile optimization model; hierarchical multiobjective programming; Pareto optimal solutions; decision power
1. Introduction
In the real world decision making situations, it is often required that the goal of the overall system is achieved in the hierarchical structure, where many decision makers who belong to its sections or divisions are in action to seek their own goals independently and are affected each other. The Stackelberg games [1, 20] can be regarded as multilevel programming problems with multiple decision makers. Although many kinds of techniques to obtain a Stackelberg solution have been proposed, almost all of such techniques are unfortunately not efficient in com-putational aspects. In order to circumvent the computation inefficiency to obtain such a Stackelberg solution and the paradox that the lower level decision power often dominates the upper level decision power, Lai [11], Shih et al.[18] and Lee et al.[13] introduced concepts of memberships of optimalities and degrees of decision powers and proposed fuzzy approaches to multilevel linear programming problems [21] under the assumption that the decision makers are not noncooperative but cooperative each other in the hierarchical decision situations.
∗Hitoshi Yano Tel.:+81-52-872-5182; fax:+81-52-872-1531.
E-mail address:[email protected]. © 2013 The Authors. Published by Elsevier B.V.
Selection and peer-review under responsibility of KES International
Open access under CC BY-NC-ND license.
On the other hand, in the actual decision making situations, the decision makers often encounter difficulties to deal with vague information or uncertain data. In order to deal with decision problems involving uncertainty, stochastic programming approaches [2],[3],[4],[6] and fuzzy programming approaches [12],[16],[24] have been developed. Recently, mathematical programming problems with fuzzy random variables [10] have been proposed [7],[14],[19], whose concept includes both probabilistic uncertainty and fuzzy one simultaneously. For multiob-jective fuzzy random linear programming problems (MOFRLP), Katagiri et al. [8],[9] formulated and proposed interactive methods to obtain a satisfactory solution. As their generalized versions, Yano et al.[22, 23] have pro-posed fuzzy approaches for MOFRLP.
In this paper, we focus on hierarchical multiobjective fuzzy random linear programming problems (HMOFRLP), where multiple decision makers in a hierarchical organization have their own multiple objective linear functions with fuzzy random variable coefficients. In order to deal with HMOFRLP, it is assumed that each decision maker has fuzzy goals for not only permissible probability levels in a fractile optimization model. Using the fuzzy deci-sion, a Pareto optimal solution concept is introduced, in which a proper balance between two kinds of membership functions of the original objective functions and the corresponding permissible objective levels is always attained. A satisfactory solution is obtained from among a Pareto optimal solution set through the interaction with the de-cision makers, in which the hierarchical dede-cision structure is reflected through the dede-cision power. In section 2, HMOFRLP is formulated as a hierarchical multiobjective stochastic programming problem (HMOSP) by using a concept of a possibility measure [5]. In section 3, through a fractile optimization model for HMOSP,DG-Pareto optimal concept is introduced. After each decision maker specifies the decision powers [11, 13] and the reference membership values [16], the correspondingDG-Pareto optimal solution is obtained by solving the minmax prob-lem. In section 4, an interactive algorithm is proposed to obtain the satisfactory solution from among aDG-Pareto optimal solution set by solving the minmax problem on the basis of the linear programming technique. In section 5, in order to demonstrate the interactive processes under the hypothetical decision maker, HMOFRLP is formu-lated as a numerical example, and solved by applying the proposed interactive algorithm. Finally, in section 6, we conclude this paper.
2. Hierarchical Multiobjective Fuzzy Random Linear Programming Problems
In this section, we focus on a hierarchical multiobjective programming problem involving fuzzy random vari-able coefficients in objective functions, which is called a hierarchical multiobjective fuzzy random linear program-ming problem (HMOFRLP).
[HMOFRLP]
first level decision maker : DM1
min x∈X
C1x=(c11x,· · ·,c1k1x)
· · · ·
q-th level decision maker : DMq
min x∈X
Cqx=(cq1x,· · ·,cqkqx)
wherex =(x1,x2,· · ·,xn)T is anndimensional decision variable column vector,X def
= {x ∈Rn |Ax≤b, x≥0},
Ais an (m×n) coefficient matrix,b=(b1,· · ·,bm)T is anmdimensional column vector.cri =(cri1,· · ·,crin),i= 1,· · ·,kr,r=1,· · ·,q,are coefficient vectors of objective functioncrix, whose elements are fuzzy random variables [10],[15],[17]), and the symbols"-"and"~"mean randomness and fuzziness respectively.
In order to deal with the objective functionscrix,i=1,· · ·,kr,r=1,· · ·,q, Katagiri et al. [8],[9] proposed an LR-type fuzzy random variable which can be regarded as a special version of a fuzzy random variable. Under the occurrence of each elementary eventω,cri j(ω) is a realization of an LR-type fuzzy random variablecri j, which is an LR fuzzy number [5] whose membership function is defined as follows.
μcri j(ω)(s)= ⎧⎪⎪ ⎪⎪⎨ ⎪⎪⎪⎪⎩ L dri j(ω)−s αri j(ω) (s≤dri j(ω)∀ω), R s−dri j(ω) βri j(ω) (s>dri j(ω)∀ω),
where the function L(t) def= max{0,l(t)}is a real-valued continuous function from [0,∞) to [0,1], and l(t) is a strictly decreasing continuous function satisfyingl(0)=1. Also,R(t)def=max{0,r(t)}satisfies the same conditions. dri j, αri j, βri jare random variables expressed bydri j=dri j1 +trid2ri j,αri j=α1ri j+triα2ri jandβri j =β1ri j+triβ2ri j.tri is a random variable whose distribution function is denoted byTri(·) which is strictly increasing and continuous, andd1
ri j,d2ri j,α1ri j, α2ri j, β1ri j, β2ri jare constants.
Similar to Katagiri et al. [8],[9], HMOFRLP can be transformed into a hierarchical multiobjective stochastic programming problem (HMOSP) by using a concept of a possibility measure [5]. As shown in [9], the realizations
cri(ω)xbecomes an LR fuzzy number characterized by the following membership functions on the basis of the
extension principle [5]. μcri(ω)x(y)= ⎧⎪⎪⎪ ⎪⎪⎪⎨ ⎪⎪⎪⎪⎪ ⎪⎩ L dri(ω)x−y αri(ω)x y≤dri(ω)x R y−dri(ω)x βri(ω)x y>dri(ω)x
For the realizationscri(ω)x,i = 1,· · ·,kr,r = 1,· · ·,q, it is assumed that the decision maker has fuzzy goals
Gri,i=1,· · ·,kr,r=1,· · ·,q[16], whose membership functionsμGri(y),i=1,· · ·,kr,r=1,· · ·,qare continuous and strictly decreasing for minimization problems. By using a concept of a possibility measure [5], a degree of possibility [7] that the objective function valuecrixsatisfies the fuzzy goalGriis expressed as follows.
Πcrix(Gri)def= supymin{μcrix(y), μGri(y)} (1)
Using a possibility measure, HMOFRLP can be transformed into the following hierarchical multiobjective stochas-tic programming problem (HMOSP).
[HMOSP]
first level decision maker : DM1
max x∈X(Πc11x( G11),· · ·,Πc 1k1x (G1k1)) · · · ·
q-th level decision maker: DMq
max x∈X(Πcq1x( Gq1),· · ·,Πc qkqx( Gqkq))
3. A Fractile Optimization Model for HMOSP
If the decision makers adopt a fractile optimization model for the objective functions of HMOSP, HMOSP can be converted to the following hierarchical multiobjective programming problem, where the decision makers specify permissible probability levels ˆpri,i=1,· · ·,kr,r=1,· · ·,qin their subjective manner [8].
[HMOP1(pˆ)]
first level decision maker : DM1
max x∈X,h1i∈[0,1],i=1,···,k1
(h11,· · ·,h1k1)
· · · ·
q-th level decision maker: DMq
max x∈X,hqi∈[0,1],i=1,···,kq (hq1,· · ·,hqkq) subject to Pr(ω|Π cri(ω)x( Gri)≥hri)≥pˆri,i=1,· · ·,kr,r=1,· · ·,q (2)
wherepˆr =( ˆpr1,· · ·,pˆrkr),r=1,· · ·,qare vectors of permissible probability levels. Since a distribution function Tri(·) is continuous and strictly increasing, the constraints (2) can be transformed to the following form.
ˆ pri≤Pr(ω|Πc ri(ω)x( Gri)≥hri)=Tri ⎛ ⎜⎜⎜⎜⎜ ⎜⎜⎝μ −1 Gri (hri)−(d1rix−L−1(hri)α1rix) d2 rix−L−1(hri)α2rix ⎞ ⎟⎟⎟⎟⎟ ⎟⎟⎠ ⇔ μ−1 Gri(hri)≥(d 1 rix−L−1(hri)α1rix)+Tri−1( ˆpri)(d2rix−L−1(hri)α2rix) (3) Let us define the right-hand side of the inequality (3) as follows.
fri(x,hri,pˆri) def
= (d1rix−L−1(hri)α1rix)+Tri−1( ˆpri)(d2rix−L−1(hri)α2rix) (4) Then, HMOP1(pˆ) can be equivalently transformed into the following form.
[HMOP2(pˆ)]
first level decision maker : DM1
max x∈X,h1i∈[0,1],i=1,···,k1
(h11,· · ·,h1k1)
· · · ·
q-th level decision maker: DMq
max x∈X,hqi∈[0,1],i=1,···,kq
(hq1,· · ·,hqkq)
subject to μGri(fri(x,hri,pˆri))≥hri,i=1,· · ·,kr,r=1,· · ·,q (5) In HMOP2(pˆ), let us pay attention to the inequalities (5). fri(x,hri,pˆri) is continuous and strictly increasing with respect tohri for anyx ∈X. This means that the left-hand-side of (5) is continuous and strictly decreasing with respect to hri for any x ∈ X. Since the right-hand-side of (5) is continuous and strictly increasing with respect to hri, the inequalities (5) must always satisfy the active condition, that is, μGri(fri(x,hri,pˆri)) = hri, i=1,· · ·,kr,r=1,· · ·,qat the optimal solution. ¿From such a point of view, HMOP2(pˆ) is equivalently expressed as the following form.
[HMOP3(pˆ)]
first level decision maker : DM1
max x∈X,h1i∈[0,1],i=1,···,k1
(μG11(f11(x,h11,pˆ11)),· · ·, μG1k1(f1k1(x,h1k1,pˆ1k1)))
· · · ·
q-th level decision maker: DMq
max x∈X,hqi∈[0,1],i=1,···,kq
(μG
q1(fq1(x,hq1,pˆq1)),· · ·, μGqkq(fqkq(x,hqkq,pˆqkq)))
subject to μGri(fri(x,hri,pˆri))=hri,i=1,· · ·,kr,r=1,· · ·,q (6) In order to deal with HMOP3(pˆ), the decision makers must specify permissible probability levelspˆin advance. However, in general, the decision makers seem to prefer not only the larger value of a permissible probability level but also the larger value of the corresponding membership functions μGri(·). ¿From such a point of view, we consider the following multiobjective programming problem which can be regarded as a natural extension of HMOP3(pˆ).
[HMOP4]
first level decision maker : DM1
max
x∈X,h1i∈[0,1],pˆ1i∈(0,1),i=1,···,k1
(μG
· · · ·
q-th level decision maker: DMq
max
x∈X,hqi∈[0,1],pˆqi∈(0,1),i=1,···,kq
(μGq1(fq1(x,hq1,pˆq1)),· · ·, μGqkq(fqkq(x,hqkq,pˆqkq)),pˆq1,· · ·,pˆqkq) subject to μG
ri(fri(x,hri,pˆri))=hri,i=1,· · ·,kr,r=1,· · ·,q (7) It should be noted in HMOP4 that permissible probability levels are not the fixed values but the decision variables. Considering the imprecise nature of the decision maker’s judgment, we assume that each decision maker (DMr) has a fuzzy goal for each permissible probability level. Such a fuzzy goal can be quantified by eliciting the corresponding membership function. Let us denote a membership function of a permissible probability level
ˆ
pri as μpˆri( ˆpri),i = 1,· · ·,kr. Then, HMOP4 can be transformed as the following hierarchical multiobjective programming problem.
[HMOP5]
first level decision maker : DM1
max
x∈X,h1i∈[0,1],pˆ1i∈(0,1),i=1,···,k1 (μG
11(f11(x,h11,pˆ11)),· · ·, μG1k1(f1k1(x,h1k1,pˆ1k1)), μpˆ11( ˆp11),· · ·, μpˆ1k1( ˆp1k1))
· · · ·
q-th level decision maker: DMq
max
x∈X,hqi∈[0,1],pˆqi∈(0,1),i=1,···,kq
(μGq1(fq1(x,hq1,pˆq1)),· · ·, μGqkq(fqkq(x,hqkq,pˆqkq)), μpˆq1( ˆpq1),· · ·, μpˆqkq( ˆpqkq)) subject to μGri(fri(x,hri,pˆri))=hri,i=1,· · ·,kr,r=1,· · ·,q (8) In order to elicit the membership functions appropriately, we suggest the following procedures. First of all, each decision maker (DMr) sets the intervalsPri =[primin,primax],i=1,· · ·,kr,wherepriminis an unacceptable maximum value of ˆpriandprimaxis a sufficiently satisfactory minimum value of ˆpri. Throughout this section, we make the following assumption.
Assumption 1.
μpˆri( ˆpri),i=1,· · ·,kr,r=1,· · ·,qare strictly increasing and continuous with respect to ˆpri∈Pri, andμpˆri(primin)= 0,μpˆri(primax)=1.
It should be noted here that,μG
ri(fri(x,hri,pˆri)) is strictly decreasing with respect to ˆpri. If the decision makers adopt the fuzzy decision [16] to integrateμG
ri(fri(x,hri,pˆri)) and μpˆri( ˆpri), HMOP5 can be transformed into the following form.
[HMOP6]
first level decision maker : DM1
max x∈X,pˆ1i∈P1i,h1i∈[0,1],i=1,···,k1 μDG11(x,h11,pˆ11),· · ·, μDG1k 1(x,h1k1,pˆ1k1) · · · ·
q-th level decision maker: DMq
max x∈X,pˆqi∈Pqi,hqi∈[0,1],i=1,···,kq μDGq1(x,hq1,pˆq1),· · ·, μDGqkq(x,hqkq,pˆqkq) subject to μGri(fri(x,hri,pˆri))=hri,i=1,· · ·,kr,r=1,· · ·,q (9) where μDGri(x,hri,pˆri) def = min{μpˆri( ˆpri), μGri(fri(x,hri,pˆri))}. (10)
In order to deal with HMOP6, we introduce aDG-Pareto optimal solution concept.
Definition 1.
x∗ ∈ X,pˆ∗ri ∈ Pri,h∗ri ∈ [0,1],i = 1,· · ·,kr,r = 1,· · ·,qis said to be aDG-Pareto optimal solution to HMOP6, if and only if there does not exist another x ∈ X,pˆri ∈ Pri,hri ∈ [0,1],i = 1,· · ·,kr,r = 1,· · ·,q such that
μDGri(x,hri,pˆri)≥μDGri(x∗,h∗ri,pˆ∗ri),i=1,· · ·,kr,r=1,· · ·,qwith strict inequality holding for at least onei, where
μGri(fri(x ∗,h∗
ri,pˆ∗ri))=h∗ri,μGri(fri(x,hri,pˆri))=hri,i=1,· · ·,kr,r=1,· · ·,q.
For generating a candidate of a satisfactory solution which is alsoDG-Pareto optimal, each decision maker is asked to specify the reference membership values [16]. Once the reference membership valuesμˆr=( ˆμr1,· · ·,μˆrkr) are specified, the correspondingDG-Pareto optimal solution is obtained by solving the following minmax problem.
[MINMAX1( ˆμ)] min x∈X,pˆri∈Pri,hri∈[0,1],i=1,···,kr,r=1,···,q,λ∈Λ λ subject to ˆ μri−μpˆri( ˆpri)≤λ, i=1,· · ·,kr,r=1,· · ·,q (11) ˆ μri−hri ≤λ, i=1,· · ·,kr,r=1,· · ·,q (12) μGri(fri(x,hri,pˆri))=hri, i=1,· · ·,kr,r=1,· · ·,q (13) whereΛ =[maxi=1,···,kr,r=1,···,qμˆri−1,mini=1,···,kr,r=1,···,qμˆri].
It should be noted here that, in general, the optimal solution of MINMAX1 (μˆ) does not reflect the hierarchical structure betweenqdecision makers where the upper level decision maker can take priority over the lower level decision makers. In order to cope with such a hierarchical preference structure betweenq decision makers in MINMAX1(μˆ), we introduce the concept of the decision powersw=(w1,· · ·,wq) for the membership functions (10), where ther-th level decision maker (DMr) can specify the decision powerwr+1in his/her subjective manner and the last decision maker (DMq) has no decision power. In order to reflect the hierarchical preference structure between multiple decision makers, the decision powersw=(w1,· · ·,wq)T have to satisfy the following inequality condition.
w1=1≥w2≥ · · · ≥wq−1≥wq>0 (14) Then, the corresponding modified MINMAX1(μˆ) is reformulated as follows.
[MINMAX2( ˆμ,w)] min x∈X,pˆri∈Pri,λ∈Λ,hri∈[0,1],i=1,···,kr,r=1,···,q, λ subject to ˆ μri−μpˆri( ˆpri)≤λ/wr, i=1,· · ·,kr,r=1,· · ·,q (15) ˆ μri−hri≤λ/wr, i=1,· · ·,kr,r=1,· · ·,q (16) μGri(fri(x,hri,pˆri))=hri, i=1,· · ·,kr,r=1,· · ·,q (17) whereΛ =[maxi=1,···,kr,r=1,···,qwi( ˆμri−1),mini=1,···,kr,r=1,···,qwiμˆri].In the constraints (16) and (17), it holds that
hri =μGri(fri(x,hri,pˆri))≥μˆri−λ/wr, ⇔ μ−1 Gri(hri)=(d 1 rix−L−1(hri)α1rix)+Tri−1( ˆpri)·(d2rix−L−1(hri)α2rix)≤μG−1ri( ˆμri−λ/wr). (18) In the right hand side of (18), because ofL−1(hri)≤L−1( ˆμri−λ/wr) andα1rix+Tri−1( ˆpri)α2rix>0, it holds that
(d1 rix−L−1(hri)α1rix)+Tri−1( ˆpri)·(d2rix−L−1(hri)α2rix) = (d1rix+Tri−1( ˆpri)d2rix)−L−1(hri) α1 rix+Tri−1( ˆpri)α2rix ≥ (d1rix+Tri−1( ˆpri)d2rix)−L−1( ˆμri−λ/wr) α1 rix+Tri−1( ˆpri)α2rix . (19)
Using (18) and (19), it holds that μ−1 Gri( ˆμri−λ/wr) ≥ (d 1 rix+Tri−1( ˆpri)d2rix)−L−1( ˆμri−λ/wr) α1 rix+Tri−1( ˆpri)α2rix = (d1 rix−L−1( ˆμri−λ/wr)α1rix)+Tri−1( ˆpri)·(d2rix−L−1( ˆμri−λ/wr)α2rix). (20) Moreover, because of ˆpri≥μ−1pˆri( ˆμri−λ/wr), (20) can be transformed into the following form.
Tri ⎛ ⎜⎜⎜⎜⎜ ⎜⎜⎝μ −1 Gri( ˆμri−λ/ wr)−(d1rix−L−1( ˆμri−λ/wr)α1rix) d2rix−L−1( ˆμri−λ/wr)α2rix ⎞ ⎟⎟⎟⎟⎟ ⎟⎟⎠≥pˆri≥μ−1pˆri( ˆμri−λ/wr), ⇔ μ−1 Gri( ˆμri−λ)≥(d 1 rix−L−1( ˆμri−λ)α1rix)+Tri−1(μ−pˆri1( ˆμri−λ))(d 2 rix−L−1( ˆμri−λ)α2rix) (21) Therefore, MINMAX2(μ,ˆ w) can be reduced to the following minmax problem.
[MINMAX3( ˆμ,w)] min x∈X,λ∈Λλ subject to μ−1 Gri( ˆμri−λ/wr) ≥ (d 1 rix−L−1( ˆμri−λ/wr)α1rix)+Tri−1(μ−1pˆri( ˆμri−λ/wr))·(d 2 rix−L−1( ˆμri−λ/wr)α2rix), i=1,· · ·,kr,r=1,· · ·,q (22) It should be noted here that MINMAX3(μ,ˆ w) is equivalent to MINMAX3(μ,ˆ w). The relationships between the optimal solution (x∗, λ∗) of MINMAX3(μ,ˆ w) andDG-Pareto optimal solutions can be characterized by the following theorem.
Theorem 1.
(1) Ifx∗ ∈ X, λ∗ ∈ Λis a unique optimal solution of MINMAX3(μ,ˆ w), then x∗ ∈ X,pˆ∗ri =μ−1pˆ ri( ˆμri−λ
∗/w r)∈
Pri,h∗ri=μˆri−λ∗/wr∈[0,1],i=1,· · ·,kr,r=1,· · ·,qis aDG-Pareto optimal solution.
(2) If x∗ ∈ X,pˆ∗ri ∈ Pri,h∗ri ∈ [0,1],i = 1,· · ·,kr,r = 1,· · ·,qis a DG-Pareto optimal solution, then x∗ ∈ X,
λ∗ =w
r( ˆμri−μpˆri( ˆp∗ri)),i =1,· · ·,kr,r=1,· · ·,qis an optimal solution of MINMAX3(μ,ˆ w) for some reference membership valuesμˆ =( ˆμr1,· · ·,μˆrkr).
4. An Interactive Algorithm
In this section, we propose an interactive algorithm to obtain a satisfactory solution from among aDG-Pareto optimal solution set. ¿From Theorem 1, it is not guaranteed that the optimal solution (x∗, λ∗) of MINMAX3(μ,ˆ w) isDG-Pareto optimal, if it is not unique. In order to guarantee theDG-Pareto optimality, we first assume that all of the constraints (22) of MINMAX3(μ,ˆ w) are active at the optimal solution (x∗, λ∗),i.e.,
μ−1 Gri( ˆμri−λ ∗/w r)−(d1rix∗−L−1( ˆμri−λ∗/wr)α1rix∗) = Tri−1(μ−1pˆri( ˆμri−λ∗/wr))·(d2rix∗−L−1( ˆμri−λ∗/wr)α2rix∗),i=1,· · ·,kr,r=1,· · ·,q. (23) If some constraint of (22) is inactive,i.e.,
μ−1 Gri( ˆμri−λ ∗/w r)−(d1rix∗−L−1( ˆμri−λ∗/wr)α1rix∗) >Tri−1(μ−1pˆri( ˆμri−λ∗/wr))·(d2rix∗−L−1( ˆμri−λ∗/wr)α2rix∗), ⇔ μ−1 Gri( ˆμri−λ ∗/w r)> fri(x∗,μˆri−λ∗/wr, μ−pˆ1ri( ˆμri−λ ∗/w r)), (24)
we can convert the inactive constraint (24) into the active one by applying the bisection method for the reference membership value ˆμri∈[λ∗/wr, λ∗/wr+1].
For the optimal solution (x∗, λ∗) of MINMAX3(μ,ˆ w), where the active conditions (23) are satisfied, we solve theDG-Pareto optimality test problem defined as follows.
max x∈X,ri≥0,i=1,···,kr,r=1,···,q w= q r=1 kr i=1 ri (25) subject to Tri−1(μ−pˆ1ri( ˆμri−λ∗/wr))·(d2rix−L−1( ˆμri−λ∗/wr)α2rix)+(d1rix−L−1( ˆμri−λ∗/wr)α1rix)+ri = Tri−1(μ−1pˆri( ˆμri−λ∗/wr))·(d2rix∗−L−1( ˆμri−λ∗/wr)α2rix∗)+(d1rix∗−L−1( ˆμri−λ∗/wr)α1rix∗), i=1,· · ·,kr,r=1,· · ·,q (26) For the optimal solution ofDG-Pareto optimality test problem, the following theorem holds.
Theorem 2.
For the optimal solution ˇx,ˇri,i=1,· · ·,kr,r =1,· · ·,qof DG-Pareto optimality test problem, ifw =0 (equiv-alently, ˇri =0,i=1,· · ·,kr,r=1,· · ·,q),x∗ ∈ X, μ−pˆri1( ˆμri−λ∗/wr)∈ Pri,μˆri−λ∗/wr ∈[0,1],i =1,· · ·,kr,r= 1,· · ·,qis aDG-Pareto optimal solution.
Now, following the above discussions, we can present the interactive algorithm in order to derive a satisfactory solution from among aDG-Pareto optimal solution set.
[An interactive algorithm]
Step 1: The decision makers (DMr,r=1,· · ·,q) set the membership functionsμGri(y),i=1,· · ·,krfor the fuzzy
goals of the objective functions in HMOFRLP.
Step 2: Each decision maker (DMr) sets the intervals Pri = [primin,primax],i = 1,· · ·,kr,where primin is an
unacceptable maximum value of ˆpri andprimaxis a sufficiently satisfactory minimum value of ˆpri. According to Assumption 1, each decision maker sets his/her membership functionμpˆri( ˆpri).
Step 3: Set the initial reference membership values as ˆμri=1,i=1,· · ·,kr,r=1,· · ·,q.
Step 4: Set the initial decision powerswr=1,r=1,· · ·,q.
Step 5: Solve MINMAX3(μ,ˆ w) by combined use of the bisection method with respect toλ ∈ Λand the
first-phase of the two-first-phase simplex method of linear programming, and obtain the optimal solution (x∗, λ∗). For the optimal solution (x∗, λ∗), The correspondingDG-Pareto optimality test problem is formulated and solved.
Step 6: If each of the decision makers (DMr,r =1,· · ·,q) is satisfied with the current values of theDG-Pareto
optimal solutionμDGri(x∗,hri∗,pˆ∗ri),i=1,· · ·,kr, where ˆp∗ri =μ−pˆri1( ˆμri−λ ∗/w
r),h∗ri =μˆri−λ∗/wr,i=1,· · ·,kr,r= 1,· · ·,q, then stop. Otherwise, let thes-th level decision maker (DMs) be the uppermost of the decision makers who are not satisfied with the current values of his/her membership functions μDGsi(x∗,h∗si,pˆ∗si),i = 1,· · ·,ks. Considering the current values, DMs updates his/her decision powerws+1 and/or his/her reference membership values ˆμsi=1,i=1,· · ·,ksaccording to the following two rules, and return to Step 5.
Rule 1.:
In order to guarantee the inequality conditions (14), ws+1 ≤wsmust be satisfied. After updatingws+1, if there exists some indext>s+1 such thatws+1<wt, then the corresponding decision powerwtis set aswt←ws+1.
Rule 2.:
At first, the reference membership values of DMr,r = 1,· · ·,q,r smust be set as the current values of the membership functions, i.e., μˆri = μDGri(x∗,h∗ri, pˆ∗ri),i = 1,· · ·,kr,r = 1,· · ·,q,r s. After that, DMs updates his/her reference membership values ˆμsi,i=1,· · ·,ks. Here, it should be stressed for DMsthat any improvement of one membership function can be achieved only at the expense of at least one of the other membership functions.
5. A Numerical Example
In order to demonstrate the proposed method and the interactive processes, we consider the following hierar-chical two-objective linear programming problem with fuzzy random variable coefficients under two hypothetical decision makers.
[HMOFRLP]
first level decision maker : DM1
min x∈X
c1ix=10
j=1
second level decision maker : DM2 min x∈X c2ix=10 j=1 c2i jxj,i=1,2
where X = {(x1,· · ·,x10) ≥ 0 | 10j=1ak jxj ≤ bk,1 ≤ k ≤ 7}, and it is assumed that a realizationcri j(ω) of an LR-type fuzzy random variablecri j is an LR fuzzy number whose membership function is defined as
μcri j(ω)(s) = L ⎛ ⎜⎜⎜⎜⎜ ⎝( d1 ri j+tri(ω)d2ri j)−s α1 ri j+tri(ω)α2ri j ⎞ ⎟⎟⎟⎟⎟ ⎠for s ≤ dri j(ω),andμcri j(ω)(s) =R ⎛ ⎜⎜⎜⎜⎜ ⎝ s−(d1 ri j+tri(ω)dri j2 ) β1 ri j+tri(ω)β2ri j ⎞ ⎟⎟⎟⎟⎟ ⎠for s > dri j(ω), whereL(t) = R(t) = max{0,1−t}, and the parameters d1
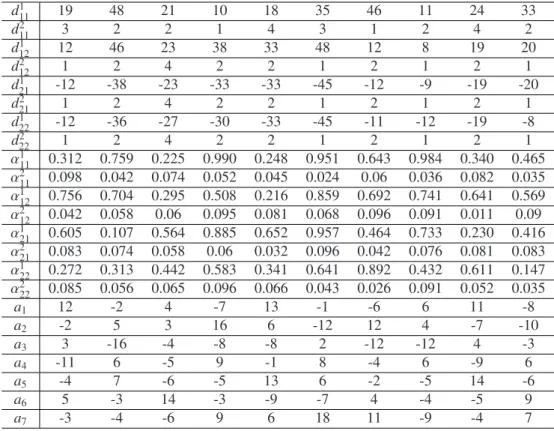
ri j,dri j2 ,α1ri j, α2ri j, β1ri j,β2ri jare given in Table 1. Sim-ilarly, the parameters of the left-hand side of the constraints are shown in Table 1 and the parameters of the right-hand-side areb1 = 140, b2 = −220, b3 = −190, b4 = 75,b5 = −160, b6 = 130, b7 = 90. For sim-plicity, we assume thattri,r= 1,2,i =1,2 are standard Gaussian random variables defined astri ∼N(0,1). In HMOFRLP, let us assume that the hypothetical decision makers set their membership functions for the objective functions asμGri(fri(x,hri,pˆri))=
fri(x,hri,pˆri)−frimax
frimin−frimax ,
i =1,2,r =1,2, where [f11min,f11max] =[2400,2600], [f12min,f12max]=[1400,1500],[f21min, f21max]=[−1000,−800],[f22min,f22max]=[−700,−500] (Step 1). We also assume that the hypothetical decision makers set their membership functions for the permissible probability levels asμpˆri( ˆpri) =
primin−pˆri
primin−primax,
i =1,2,r =1,2,where [p11min,p11max] =[0.3,0.9],[p12min,p12max]=[0.2,0.85], [p21min,p21max]=[0.3,0.87],[p22min,p22max] =[0.4,0.91] (Step 2). Set the initial reference membership values as ( ˆμ11,μˆ12) = ( ˆμ21,μˆ22) = (1,1) (Step 3) and decision powers as (w1,w2) = (1,1) (Step 4). At Step 5, solve MINMAX3(μ,ˆ w) to obtain the corresponding DG-Pareto optimal solution as μGri(fri(x,hri,pˆri)) = 0.804,r = 1,2,i = 1,2. For the current value of the DG-Pareto optimal solution, DM1 updates his/her decision power as w2 =0.7 in order to improve his/her own membership functions μDG1i(·),i = 1,2 at the expense of DM2’s membership functions μDG2i(·),i = 1,2 (Step 6). Then, the corresponding DG-Pareto optimal solution is ob-tained asμG1i(f1i(x,h1i,pˆ1i)) = 0.838,i = 1,2, μG2i(f2i(x,h2i,pˆ2i)) = 0.769,i = 1,2.Then, DM1 is satisfied with the current value of the membership functions, but DM2 is not satisfied with the current values. There-fore, in order to improveμDG22(·) at the expense ofμDG21(·), DM2 updates his/her reference membership values as ( ˆμ21,μˆ22)=(0.730,0.790) according to Rule 2 (Step 6). Then, the correspondingDG-Pareto optimal solution is obtained asμG1i(f1i(x,h1i,pˆ1i)) =0.852,i =1,2μG21(f21(x,h21,pˆ21)) =0.750,μG22(f22(x,h22,pˆ22)) =0.810. Since both DM1and DM2are satisfied with current values of the above membership functions, stop the interactive processes (Step 6).
6. Conclusion
In this paper, we have proposed an interactive decision making method for HMOFRLP to obtain a satisfactory solution from among aDG-Pareto optimal solution set. In the proposed method, each decision maker is required to specify the membership functions for the fuzzy goals of not only the original objective functions but also the permissible probability levels. After each decision maker updates not only the reference membership values but also the decision powers according to two kinds of updating rules, the correspondingDG-Pareto optimal solution is obtained by solving the corresponding minmax problem MINMAX3(μ,ˆ w) on the basis of linear programming technique. At anyDG-Pareto optimal solution, a proper valance between permissible probability levels and the corresponding objective functions is attained. Moreover, a hierarchical decision structure between multiple deci-sion makers will be reflected at a satisfactory solution through the decideci-sion powers.
References
[1] Anandalingam G. A mathematical programming model of decentralized multi-Level systems,Journal of Operational Research Society, 1988; 39; 1021-1033.
[2] Birge,JR, Louveaux,F.Introduction to stochastic programming, Springer; 1997.
Table 1. Parameters of the objective functions and the constraints d1 11 19 48 21 10 18 35 46 11 24 33 d2 11 3 2 2 1 4 3 1 2 4 2 d1 12 12 46 23 38 33 48 12 8 19 20 d2 12 1 2 4 2 2 1 2 1 2 1 d1 21 -12 -38 -23 -33 -33 -45 -12 -9 -19 -20 d2 21 1 2 4 2 2 1 2 1 2 1 d1 22 -12 -36 -27 -30 -33 -45 -11 -12 -19 -8 d2 22 1 2 4 2 2 1 2 1 2 1 α1 11 0.312 0.759 0.225 0.990 0.248 0.951 0.643 0.984 0.340 0.465 α2 11 0.098 0.042 0.074 0.052 0.045 0.024 0.06 0.036 0.082 0.035 α1 12 0.756 0.704 0.295 0.508 0.216 0.859 0.692 0.741 0.641 0.569 α2 12 0.042 0.058 0.06 0.095 0.081 0.068 0.096 0.091 0.011 0.09 α1 21 0.605 0.107 0.564 0.885 0.652 0.957 0.464 0.733 0.230 0.416 α2 21 0.083 0.074 0.058 0.06 0.032 0.096 0.042 0.076 0.081 0.083 α1 22 0.272 0.313 0.442 0.583 0.341 0.641 0.892 0.432 0.611 0.147 α2 22 0.085 0.056 0.065 0.096 0.066 0.043 0.026 0.091 0.052 0.035 a1 12 -2 4 -7 13 -1 -6 6 11 -8 a2 -2 5 3 16 6 -12 12 4 -7 -10 a3 3 -16 -4 -8 -8 2 -12 -12 4 -3 a4 -11 6 -5 9 -1 8 -4 6 -9 6 a5 -4 7 -6 -5 13 6 -2 -5 14 -6 a6 5 -3 14 -3 -9 -7 4 -4 -5 9 a7 -3 -4 -6 9 6 18 11 -9 -4 7
[4] Danzig GB. Linear programming under uncertainty,Management Science, 1955; 1; 197-206. [5] Dubois D, Prade H.Fuzzy sets and systems, Academic Press; 1980.
[6] Kall P, Mayer J.Stochastic linear programming models, theory, and computation, Springer; 2005.
[7] Katagiri H, Ishii H, Itoh T. Fuzzy random linear programming problem, In:Proceedings of Second European Workshop on Fuzzy Decision Analysis and Neural Networks for Management, Planning and Optimization; 1997, p.107-115.
[8] Katagiri H, Sakawa M, Kato K, Ohsaki S. An interactive fuzzy satisficing method for fuzzy random multiobjective linear programming problems through the fractile optimization model using possibility and necessity measures, In:Proceedings of the Ninth Asia Pacific Management Conference; 2003, p.795-802.
[9] Katagiri H, Sakawa M, Kato K, Nishizaki I. Interactive multiobjective fuzzy random linear programming: Maximization of possibility and probability,European Journal of Operational Research2008; 188; 530-539.
[10] Kwakernaak H. Fuzzy random variable-1,Information Sciences1978; 15; 1-29.
[11] Lai YJ. Hierarchical optimization : a satisfactory solution,Fuzzy Sets and Systems1996; 77; 321-335. [12] Lai VJ, Hwang CL.Fuzzy mathematical programming, Springer; 1992.
[13] Lee ES, Shih H.Fuzzy and multi-level decision makingSpringer; 2001.
[14] Luhandjula MK, Gupta MM. On fuzzy stochastic optimization,Fuzzy Sets and Systems, 81, pp.47-55, (1996). [15] Puri ML, Ralescu DA. Fuzzy random variables,Journal of Mathematical Analysis and Applications1986; 14; 409-422. [16] Sakawa M.Fuzzy sets and interactive multiobjective optimizationPlenum Press; 1993.
[17] Sakawa M, Nishizaki I, Katagiri H.Fuzzy stochastic multiobjective programmingSpringer; 2011.
[18] Shih H, Lai YJ, Lee ES. Fuzzy approach for multi-level programming problems,Computers and Operations Research1996; 23; 73-91. [19] Wang GY, Qiao Z. Linear programming with fuzzy random variable coefficients,Fuzzy Sets and Systems1993; 57; 295-311.
[20] Wen UP, Hsu ST. Linear bi-level programming problems - a review,Journal of Operational Research Society1991; 42; 125-133. [21] Yano H. A fuzzy approach for hierarchical multiobjective linear programming problems,Lecture Notes in Engineering and Computer
Science: Proceedings of The International MultiConference of Engineers and Computer Scientists 2010, 2010, p.2098-2103.
[22] Yano H, Matsui K. Fuzzy approaches for multiobjective fuzzy random linear programming problems through a probability maximiza-tion model,Lecture Notes in Engineering and Computer Science: Proceedings of The International MultiConference of Engineers and Computer Scientists 2011, 2011, p.1349-1354.
[23] Yano H, Sakawa M. Interactive multiobjective fuzzy random linear programming through fractile criteria,Advances in Fuzzy Systems, Hindawi Publishing Corporation, 2012, Article ID 521080.