Existence and Uniqueness of a Minimum Crisp
Boolean Petri Net
Gajendra Pratap Singh
Department of Applied MathematicsDelhi Technological University Shahbad Daulatpur, Main Bawana Road
Delhi-110042, India
Sangita Kansal
Department of Applied MathematicsDelhi Technological University Shahbad Daulatpur, Main Bawana Road
Delhi-110042, India
Mukti Acharya
Department of Applied MathematicsDelhi Technological University Shahbad Daulatpur, Main Bawana Road
Delhi-110042, India
ABSTRACT
In the continuing research towards characterizing1-safe Petri nets withn-places and generating all the2n
binaryn-vectors as mark-ing vectors exactly once, the problem of determine minimum Petri nets; ‘minimum’ in the sense that the number of transitions is kept minimum possible for the generation of all the2nbinaryn-vectors
has been found. In this paper, the existence and uniqueness of a minimum Petri net which generates all the2n binary n-vectors
exactly once has been shown. For brevity, a1-safe Petri net that generate all the binaryn-vectors as marking vectors is called a Boolean Petri net and a1-safe Petri net that generates all the bi-naryn-vectors exactly once is called crisp Boolean Petri net.
Keywords:
1-safe Petri net, reachability tree, binaryn-vector, marking vec-tor.
1. INTRODUCTION
Petri nets invented by C.A. Petri [1] are designed specifically to model a variety of systems, especially concurrent and dynamic systems, of which computer systems are a good representation. Petri nets can capture the essence of decisions: conflict and par-allelism. Petri nets are the graphical and mathematical model-ing tool applicable to many systems such as modelmodel-ing, analy-sis, control, optimization, simulation and implementation of var-ious engineering systems. Of all existing models, Petri nets and their extensions are of undeniable fundamental interest because they define easy graphical support for the representation and the understanding of basic mechanism and behaviors. The develop-ment of high-end computers has greatly enhanced the use of Petri nets in diverse fields. However, there is a drawback inherent to discrete event-system they suffer from state explosion problem as what will happen when a system is highly populated, i.e., ini-tial marking is large. This phenomenon leads to an exponenini-tial growth of the cardinality of the set of markings which, in turn, would blow up the ‘size’ (i.e., the number of arcs) of the sys-tem. This makes us to study the safe systems deeply. Towards this end, the authors proposed a1-safestar Petri netSn, with
|P|=nand|T|=n+ 1, having a central transition, that
gener-ates all the binaryn-vectors, as its marking vectors [2]; they also
established the existence of1-safe Petri nets that generate all the binaryn-vectors exactly once as marking vectors keeping the depth of the reachability tree minimum [3]. After that a question came into the mind of authors that, “Does there exist a Petri net which generates all the binaryn-vectors exactly once with min-imum number of transitions?” and they successfully established the existence of such a Petri net in this paper. The uniqueness of this Petri net is also shown here.
2. PRELIMINARIES
For the sake of completeness, some of the necessary definitions and concepts used in this paper are discussed here. For standard terminology and notation on Petri nets theory and Graph theory, the reader is referred to Peterson[4] and Harary[5], respectively. Throughout this paper, the following definition given by Jensen [6] is being used.
APetri netis a5-tupleN= (P, T, I−, I+, µ0), where (1) Pis a nonempty set of ‘places’,
(2) T is a nonempty set of ‘transitions’, (3) P∩T =∅,
(4) I−, I+ :P ×T −→
N, whereNis the set of nonnegative
integers, are called thenegativeand thepositive‘incidence functions’ (or, ‘flow functions’) respectively,
(5) ∀ p ∈ P,∃t ∈ T : I−(p, t) 6= 0 or I+(p, t) 6= 0and
∀t∈T,∃p∈P :I−(p, t)6= 0 or I+(p, t)6= 0,
(6) µ0:P →
Nis theinitial marking.
In fact,I−(p, t)andI+(p, t)represent the number of arcs from ptotandttoprespectively.I−,I+andµ0 can be viewed as matrices of size|P| × |T|,|P| × |T|and|P| ×1, respectively.
interconnecting places and transitions to represent the flow relation. The initial marking is represented by placing a token in the circle representing a placepi as a black dot whenever
µ0(p
i) = 1, 1 ≤ i≤ n = |P|. In general, amarkingµis a
mappingµ:P −→N. A markingµcan hence be represented
as a vectorµ∈Nn, n=|P|, such that theithcomponent ofµ
is the valueµ(pi).
In a Petri netNa transitiont∈T is said to beenabledatµif and only ifI−(p, t)≤µ(p),∀p∈P. An enabled transition may or may not ‘fire’ (depending on whether the event actually takes place or not). After firing atµ, the new markingµ0 is given by the rule
µ0(p) =µ(p)−I−(p, t) +I+(p, t), f orall p∈P.
and writeµ −→t µ0, whenceµ0is said to bedirectly reachable fromµ. Hence, it is clear, what is meant by a sequence like
µ0 t1
−→µ1 t2
−→µ2 t3
−→µ3· · · tk −→µk,
which simply represents the fact that the transitions
t1, t2, t3, . . . , tk
have been successively fired to transform the markingµ0into the markingµk. The whole of this sequence of transformations is
also written in short asµ0−→σ µk, whereσ=t
1, t2, t3, . . . , tk.
A markingµis said to bereachable fromµ0, if there exists a sequence of transitions which can be successively fired to obtain µfromµ0. The set of all markings of a Petri netN reachable from a given markingµis denoted byM(N, µ)and, together with the arcs of the formµi−→tr
µj, represents what in standard
terminology called thereachability graphR(N, µ)of the Petri netN. If the reachability graph has no cycle then it is called
reachability tree.
A place in a Petri net issafeif the number of tokens in that place never exceeds one. A Petri net issafeif all its places are safe. Thepresetof a transitiontis the set of all input places tot, i.e.,•t={p ∈ P : I−(p, t) > 0}. The postsetof tis the set of all output places fromt, i.e.,t•={p ∈ P : I+(p, t) > 0}. Similarly,p0spreset and postset are•p={t∈T :I+(p, t)>0}
andp•={t∈T :I−(p, t)>0}, respectively.
A pair of a placepand a transitiontis called a self-loop ifpis both an input and output place oft(see [8]).
LetN = (P, T, I−, I+, µ0)be a Petri net with|P| = nand
|T| = m, the incidence matrixI = [aij]is ann×mmatrix
of integers and its entries are given byaij =a+ij−a − ijwhere
a+
ij=I+(pi, tj)is the number of arcs from transitiontjto its
out-put placepianda−ij=I
−(p
i, tj)is the number of arcs from place
pito its output transitiontj, i.e., in other words,I=I+−I−.
3. MAIN RESULTS
In order to establish the main result of this paper, The following definitions are needed.
DEFINITION 1. [9] LetN=(P, T, I−, I+, µ0)be a Petri net
andZbe a subnet ofN. ThenZ is called a strong chain cycle (SCC) ofNorNis said to have a strong chain cycle (SCC)Z, if|•t|=2,|p•|=2 and|t•|=1∀p, t∈ Z
. If an SCCZ contains all the places ofN thenNis said to have a strong chain cycle covering all the places (see Figure 1 for illustration). Note that an SCC containingkplaces, wherek ≤ n =|P|will always havekself-loops.
t1 1
p
n
p
2
p
tn
t2
3
p t
[image:2.595.394.514.98.271.2]3
Fig. 1. Strong chain cycle
DEFINITION 2. LetNn,mbe a Petri net withnplaces and
mtransitions, having the following properties (i) n ≤ m,(ii) the ith transition t
i is contained in exactlyn− iself-loops,
i = 1,2,· · ·, n and (iii) the sub-Petri net N∗
n,n induced by the placesp1, p2,· · ·, pnand transitionst1, t2,· · ·, tnforming identity matrixInin the incidence matrixI=I+−I−=I[i, j] =
1, ifi=jand0otherwise, for1≤ i≤nandi≤j ≤ n, of
Nn,mdoes not contain
as a sub-Petri net.
If the Petri netNn,mis1-safe then the structure shown in Figure
2 will not exist because on firing oftj,j= 1,2,· · ·, mPetri net
will not remain safe.
t1 1
p
4
p
2
p
tm
t2
3
p t
3
t4
Fig. 2. A non-safe Petri net
LEMMA 3. If a1-safe Petri netN = (P, T, I−, I+, µ0),
|P| = |T|= nhavingInas its incidence matrix, containing an SCC between two places and two transitions withµ0(p) = 1,
[image:2.595.351.476.494.690.2]PROOF. SupposeN = (P, T, I−, I+, µ0) has an SCC be-tween any two placespi,pjand two transitionsti,tj. This means
that(pi, tj)is a single arc inNifi=jand symmetric arc inN
ifi6=j. Sinceµ0(p) = 1,∀p∈P, all the transitions are enabled and fire. After firing of the transitionstiandtjin the first stage,
we will get the ‘0’ at theithandjthplaces respectively. After
firing, these transitions become dead because|•
ti|=|•tj|= 2
astiandtjlie on SCC. Therefore in the next stage of firing, we
cannot get the marking vector whoseithas well asjth
compo-nents are zero simultaneously. Therefore,N does not generate all2nbinaryn-vectors as its marking vectors and hence is not
Boolean.
LEMMA 4. [9] If a1-safe Petri netN= (P, T, I−, I+, µ0),
|P|=n, is Boolean then|P| ≤ |T|.
LEMMA 5. [10] A disconnected Petri net havingn compo-nents ofK2∼=J−→is Boolean.
In the following theorem, which is the main result of this paper, we give the construction of a minimum crisp Boolean Petri net. By a minimum crisp Boolean Petri net we mean a Petri net which is Boolean and generates all the marking vectors exactly once using the minimum number of transitions.
THEOREM 6. A 1-safe Petri net Nn,n := Nn,n∗ with
µ0(p) = 1
,∀p∈P, is a minimum crisp Boolean Petri net.
PROOF. The theorem is proved by the Principle of Mathemat-ical Induction (PMI) on|P|=n. Let n=1. ThenN1∗,1is a Petri net with one placep1and one transitiont1. This meansN1∗,1has no self-loop as shown in Figure 3. Further, sinceµ0(p
1) = 1, it
is easy to verify that the reachability treeR(N∗
1,1, µ0)ofN1∗,1as
shown in Figure 4 contains all the binary1-vectors, namely(1), (0)exactly once and after firing of the transitiont1, it becomes dead.
1
p
[image:3.595.377.495.94.352.2]t1
Fig. 3. N1∗,1
(1)
(0) t1
Fig. 4. R(N∗
1,1, µ0)
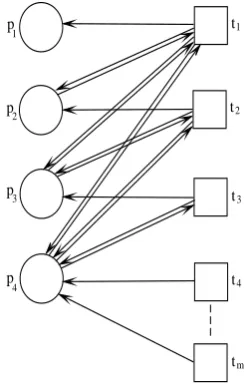
Next, letn= 2. ThenN∗
2,2is a Petri net with two places namely, p1,p2and two transitions namely,t1,t2. The structure ofN2∗,2 is shown in Figure 5. Sinceµ0(p) = 1,∀p∈P, both the tran-sitionst1,t2are enabled and fire. After firing oft1andt2in the first stage, we get marking vectors(0,1)and(1,0)respectively. In the second stage of firing, at the marking vector(0,1), only transitiont2is enabled and gives the marking vector(0,0)after firing and at this marking vector all the transitions become dead. On the other hand, at the marking vector(1,0), no transition is enabled. Hence. it is clear that the reachability treeR(N2∗,2, µ0) ofN∗
2,2 as shown in Figure 6 contains all the4 = 22, binary
t2 t1 1 1 1 11 1 1 1
p
2 p
Fig. 5. N2∗,2
(1,1)
(0,1) t1
(1,0)
(0,0) t2
t2
Fig. 6. R(N2∗,2, µ0)
2-vectors(a1, a2),a1, a2∈ {0,1}exactly once having the
mini-mum number of transitions. We can construct N2∗,2 from N
∗
1,1 and R(N
∗
2,2, µ0) from
R(N∗
1,1, µ0)procedurally as follows:
Construction ofN2∗,2fromN ∗
1,1
Step 1: Take one copy ofN1∗,1and one copy ofK2∼=
J
−→2, letting the place and transition inK2asp2andt2respectively.
Step 2: Draw the self-loop from the placep2ofK2to the transi-tiont1inN1∗,1. In this way, we obtain the resulting structureN
]
2,2
having two placesp1,p2and two transitionst1,t2, in which tran-sitiont1is contained in only one self-loop andt2is not contained in any self-loop as shown in Figure 7.
t2 t1 1
p
[image:3.595.129.209.455.632.2]2 p
Fig. 7. N2],2=:N2∗,2
Construction ofR(N2∗,2, µ0)fromR(N ∗
1,1, µ0)
Step 1: Take two copies of R(N∗
1,1, µ
0). In the first copy,
augment ‘0’ at the first position of each vector ofR(N∗
1,1, µ0)
and denote the resulting labeled tree asR0(N1∗,1, µ0)as shown in Figure 8. Similarly, in the second copy, augment ‘1’ at the first position of each vector of R(N∗
1,1, µ0) and denote the resulting labeled tree asR1(N1∗,1, µ0)as shown in Figure 9.
[image:3.595.376.494.531.631.2](0,1)
(0,0) t1
Fig. 8. R0(N1∗,1, µ0)
(1,1)
(1,0) t1
Fig. 9. R1(N1∗,1, µ0)
(1,1)
(0,1) t1
(1,0)
(0,0)
t2
t2
Fig. 10. R∗(N2∗,2, µ0)
Step 3: Label the arcs of R1(N1∗,1, µ0) and R0(N1∗,1, µ0) as t2 in R∗(N2∗,2, µ
0). Thus, we get the resulting labeled tree
R∗(N∗
2,2, µ0)as shown in Figure 10.
It is easy to see that all the vectors inR∗(N∗
2,2, µ0)are distinct since these are obtained by fusing the nodes ofR1(N1∗,1, µ0) andR0(N1∗,1, µ0)and are4 = 22in number. It is clear that these are the marking vectors ofN∗
2,2. Thus, the resulting labeled tree R∗(N∗
2,2, µ0)obtained is indeed the reachability tree of N2∗,2 becauseR∗(N∗
2,2, µ
0)has the same number of distinct nodes
together with the same number of arcs having the same labelings (see Figure 10). By the construction ofN2],2fromN∗
1,1as given in Step 2,N2],2=:N∗
2,2implies the uniqueness of its reachability tree. Hence,R∗(N2∗,2, µ0) =:R(N
∗
2,2, µ0).
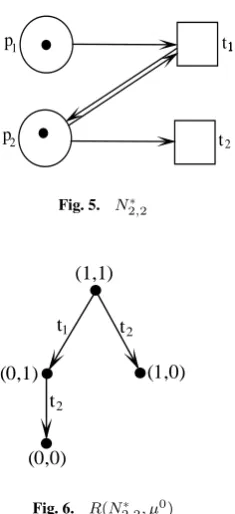
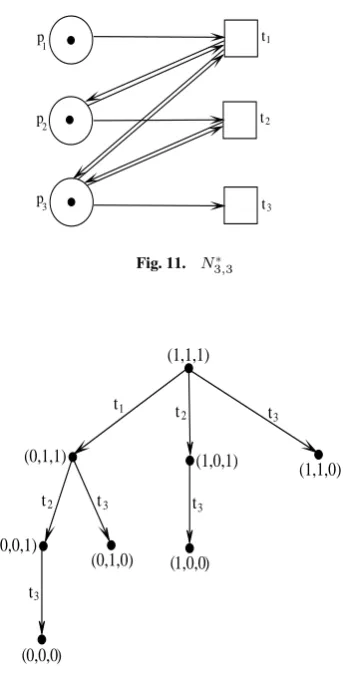
Next, let n = 3. ThenN3∗,3 is a Petri net with three places namely,p1,p2andp3and three transitions namely,t1,t2andt3. The structure ofN3∗,3is shown in Figure 11. Sinceµ0(p) = 1,
∀p∈P, all the transitionst1,t2andt3are enabled and fire. Af-ter firing oft1,t2andt3in the first stage, we get marking vec-tors(0,1,1),(1,0,1)and (1,1,0)respectively. In the second stage of firing, at the marking vector(0,1,1), only transitiont2 andt3 are enabled and fire giving the marking vector(0,0,1) and(0,1,0)respectively. On the other hand, at the marking
vec-tor(1,0,1), only transitiont3 is enabled and after firing gives
the marking vector (1,0,0). Similarly, at the marking vector (1,1,0) all the transitions become dead. In the third stage of firing, only at the marking vector(0,0,1), the transitiont3 is
enabled and fires giving the marking vector(0,0,0). Hence. it is clear that the reachability treeR(N∗
3,3, µ0)ofN
∗
3,3 (see Fig-ure 12) contains all the8 = 23, binary3-vectors(a
1, a2, a3),
a1, a2, a3 ∈ {0,1}exactly once with the minimum number of transitions.
t1 1
p
2
p t2
3
[image:4.595.336.508.154.499.2]p t3
Fig. 11. N∗
3,3
(1,1,1)
(0,1,1) (1,0,1)
(1,1,0)
(0,0,1)
(0,1,0)
(0,0,0)
t1 t
2 t3
t2 t3
t3
(1,0,0) t3
Fig. 12. R(N3∗,3, µ0)
We can construct N∗
3,3 from N2∗,2 and R(N3∗,3, µ0) from
R(N∗
2,2, µ0)procedurally as follows:
Construction ofN∗
3,3fromN
∗
2,2
Step 1: Take one copy ofN∗
2,2and one copy ofK2∼=J−→2, letting the place and transition inK2asp3andt3respectively.
Step 2: Draw the self-loop from the placep3ofK2to eachti,
i= 1,2. In this way, we obtain the resulting structureN3],3
hav-ing three placesp1,p2,p3and three transitionst1,t2,t3in which transitiontiis contained in(n−i)self-loops,∀i= 1,2,3, as
shown in Figure 13. Thus,N3],3=:N∗
3,3.
Construction ofR(N∗
3,3, µ0)fromR(N2∗,2, µ0)
Step 1: Take two copies ofR(N∗
2,2, µ
0). In the first copy,
aug-ment ‘0’ at the first position of each vector ofR(N∗
2,2, µ0)and
denote the resulting labeled tree asR0(N2∗,2, µ0)as shown in Figure 14. Similarly, in the second copy, augment ‘1’ at the first position of each vector ofR(N2∗,2, µ0)and denote the resulting labeled tree asR1(N2∗,2, µ0)as shown in Figure 15.
Step 2: Join the root node (1,1,1) of R1(N2∗,2, µ
0) to the
t1 1
p
2
p t2
3
p t
[image:5.595.94.228.88.527.2]3
Fig. 13. N3],3=:N∗
3,3
t1 t2
t2
(0,0,1)
(0,1,0)
(0,0,0)
(0,1,1)
Fig. 14. R0(N2∗,2, µ0)
t1 t2
t2
(1,0,1)
(1,1,0)
(1,0,0)
(1,1,1)
Fig. 15. R1(N2∗,2, µ0)
Step 3: Increase by one the suffixes of labeled arcs of R1(N2∗,2, µ0)andR0(N2∗,2, µ0)except the labeled arct1 as in Step 2. Thus, we get the resulting labeled treeR∗(N3∗,3, µ0)(see Figure 16).
In fact, all the vectors in R∗(N∗
3,3, µ
0) are distinct since
these are obtained by fusing of the nodes of R1(N2∗,2, µ0) and R0(N2∗,2, µ0) and they are 22 + 22 = 23 in number. Also, labeling of arcs in the resulting treeR∗(N∗
3,3, µ0)is the same as R(N∗
3,3, µ0). Thus, the resulting tree R∗(N3∗,3, µ0)
obtained is indeed the reachability tree of N∗
3,3 because R∗(N∗
3,3, µ
0)has the same number of distinct nodes together
with the same number of arcs having the same labelings. By the construction as given in Step 2 ofN3],3 from N∗
3,3, N
]
3,3
=:N∗
3,3 implies the uniqueness of its reachability tree. Hence, R∗(N∗
3,3, µ0)=:R(N
∗
3,3, µ0).
Now, assume that the result is true forn=kplaces. That means, we have a crisp Boolean Petri netN∗
k,k withkplaces namely,
p1,p2,· · ·,pkandktransitions namely,t1,t2· · ·,tk, where the
transitiontiis contained in(k−i)self-loops,∀i= 1,2,· · ·, k
(see Figure 17).
(1,1,1)
(0,1,1) (1,0,1)
(1,1,0)
(0,0,1)
(0,1,0)
(0,0,0)
t1 t
2 t3
t2 t3
t3
[image:5.595.339.509.101.262.2](1,0,0) t3
Fig. 16. R∗(N∗
3,3, µ0)=:R(N3∗,3, µ0)
t1 1
p
2
p t2
3
p t3
k
[image:5.595.357.475.306.470.2]p tk
Fig. 17. Nk,k∗
Now, show that the result is true forn=k+ 1. For this purpose, construct N∗
k+1,k+1 from N ∗
k,k and R(N ∗
k+1,k+1, µ
0) from
R(N∗
k,k, µ0)procedurally as follows:
Construction ofN∗
k+1,k+1fromN ∗ k,k
Step I: Take one copy ofNk,k∗ and one copy ofK2∼=
J
−→2, letting the place and transition ofK2denoted aspk+1andtk+1 respectively.
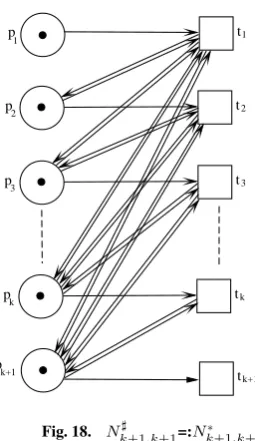
Step II: Draw a self-loop between pk+1 to each ti, i =
1,2,· · ·, k. So, we obtain the resulting structureNk]+1,k+1for k+ 1places namely,p1,p2,· · ·,pk+1 andk+ 1transitions namely,t1,t2,· · ·,tk+1in which the transitiontiis contained
in(k+ 1)−iself-loops,∀i= 1,2,· · ·,(k+ 1), as shown in Figure 18. Thus,Nk]+1,k+1=:Nk∗+1,k+1.
Construction ofR(N∗
k+1,k+1, µ
0)fromR(N∗
k,k, µ
0)
Step I: Take two copies ofR(N∗ k,k, µ
0). In the first copy,
aug-ment ‘0’ at the first position of each vector ofR(Nk,k∗ , µ0)
and denote the resulting labeled tree as R0(Nk,k∗ , µ
0).
Sim-ilarly, in the second copy, augment ‘1’ at the first position of each vector of R(N∗
k,k, µ
0) and denote the resulting
la-beled tree asR1(Nk,k∗ , µ0). Hence, all the augmented vectors
inR0(Nk,k∗ , µ
0)andR
1(Nk,k∗ , µ
0)are distinct.
Step II: Join the root node(1,1,1,· · ·,1)ofR1(Nk,k∗ , µ0)to
the root node(0,1,1,· · ·,1)ofR0(Nk,k∗ , µ
0)by an arc from
t1 1
p
k+1 p
2 p
tk+1 t2
3
p t3
k
[image:6.595.92.220.94.315.2]p tk
Fig. 18. Nk]+1,k+1=:Nk∗+1,k+1
Step III: Increase by one the suffixes of labeled arcs of R1(Nk,k∗ , µ0) and R0(Nk,k∗ , µ0) except the labeled arc t1 as in Step II. Thus, we get the resulting labeled tree R∗(N∗
k+1,k+1, µ
0).
In fact, all the vectors inR∗(N∗
k+1,k+1, µ0)are distinct since these are obtained by fusing the nodes of R1(Nk,k∗ , µ
0) and
R0(Nk,k∗ , µ0) and they are 2k + 2k = 2k+1 in number.
Also, labeling of arcs in the resulting treeR∗(N∗
k+1,k+1, µ
0)
is the same as in R(N∗
k+1,k+1, µ
0). Thus, the resulting
tree R∗(N∗
k+1,k+1, µ0) obtained is indeed the reachability tree of N∗
k+1,k+1 because R
∗(N∗
k+1,k+1, µ
0) has the same
number of distinct nodes together with the same number of arcs having the same labelings. By the construction as given in Step II of Nk]+1,k+1 from Nk∗+1,k+1, N
]
k+1,k+1 =: Nk∗+1,k+1implies the uniqueness of its reachability tree. Hence, R∗(N∗
k+1,k+1, µ
0)=:R(N∗
k+1,k+1, µ
0).
Hence, the result follows by PMI.
The1-safe Petri netNn,mwheren6=mwithµ0(p) = 1,∀p∈
Palso generates all the binaryn-vectors. In this case repetitions may occur. That isNn,mis a Boolean Petri net but not
neces-sarily crisp. In any1-safe Petri netN = (P, T, I−, I+, µ0),
|P|=|T|= n, withµ0(p) = 1,∀p∈ P, at any stage in the dynamics ofN when binaryn-vectors at Hamming distancek fromµ0 are being generated all the binaryn-vectors of Ham-ming distance less thankhave already been generated. Now, the uniqueness of1-safe Petri netNn,n=:Nn,n∗ which is
crisp Boolean will be proved in the next theorem.
THEOREM 7. The 1-safe Petri net Nn,n := Nn,n∗ is the unique minimum crisp Boolean Petri net.
PROOF. The existence of the crisp Boolean Petri netN∗ n,n
has been already proved in Theorem 1. Here, the uniqueness of Nn,n∗ will be established. SinceN
∗
n,nhasnplaces andn
transi-tions, by Lemma 2,Nn,n∗ is minimum. LetN be any minimum
crisp Boolean Petri net. We claim,N∼=Nn,n∗ . SinceNis crisp, |P|=nand minimality ofNimplies that|T|=n. Furthermore,
µ0(p) = 1,∀p∈P. For generating all thenC
1binaryn-vectors as marking vectors of Hamming distance1fromµ0, we must have a spanning subgraphN0 of N consisting ofn copies of K2∼=J−→, this leads to a contradiction about crisp Boolean
Petri net (by Lemma 3). Suppose inN, there is an arc fromti
topjand not frompj toti, fori 6= j. Then at the first stage
of firing atµ0, the safeness ofNis violated. Therefore, there is no arc inN fromtitopj, fori6=j. Hence, whenever there is
an arc fromtitopj, fori 6= j, there exists an arc frompjto
tiso that they form a self-loop. Next, suppose inN, there is an
arc frompjtotiand not fromtitopj, fori6= j. Then in the
first stage of firing oftiwe will get at least one marking vector
of Hamming distance2fromµ0whoseithandjthcomponents
are zero and would not get the marking vector of Hamming dis-tance1whoseithcomponent is zero andjthcomponent is1
or vice-versa.|T| = nimplies that in the next stage of firing, the marking vector of Hamming distance1fromµ0cannot get generated. By Remark 3 it implies that whenk = 2, we get the contradiction to our assumption thatN is crisp. Therefore, whenever, there is an arc frompjtoti,i6=j, there exists an arc
fromtitopjalso; in other words,piandtjform a self-loop, for
i6=j. These arguments imply eitherpiandtjare not adjacent
or they form a self-loop, fori6=j. If for alli6=j;piandtjare
not adjacent thenN =nJ
−→which is not crisp Boolean (see Lemma 3). Therefore, there do exist self-loops(pi, tj)for
somei6=j. Ifn = 1,N ∼=N∗
1,1 and we are through. Hence, supposen ≥ 2. Since there is at least one self-loop inN,N has less connected components than those inN0. The following cases are under consideration, namely:
Case 1: N0containsC
1 ∼=
pi J−→ti
as a component. Sincen≥
2there exists a componentC2ofN0. Now two subcases arise.
Subcase 1: C2 ∼=
pr J
−→tr i.e.,C2 has only one component of N0. If there is no self-loop inNconnectingC1andC2inN0then a marking vector of Hamming distance2fromµ0is repeated, a contradiction to our assumption. Therefore, there must be a self-loop connectingC1andC2inN. Without loss of generality, let C1= (pi, ti),C2= (pr, tr)and self-loop(pi, tr)or(pr, ti). If
both self-loop(pi, tr)and(pr, ti)exist then by Lemma 1,Nis
not crisp Boolean. Therefore, only one of these self-loops exists. Without loss of generality, assume that(pr, ti)is a self-loop that
connectsC1andC2. Thus forn= 2,N∼=N2∗,2.
Subcase 2: C2 has at least two components ofN0. Let these components of N0
be
pr J
−→tr and
ps J
−→ts. Since C2 is connected, there are at least |C2|
2 − 1 self-loops in C2. If
|C2| = 4 then in C2 there are at least 42 −1 = 1 self-loop. Now, without loss of generality, suppose (ps, tr) is a
self-loop. After firing inN, we get all the binary vectors of Hamming distance1from µ0 without repetitions. We get the binary vectors (a1, a2,· · ·, ai,· · ·, ar, ar+1· · ·, as,· · ·, an)
where ai = 0, aj = 1, ∀j 6= i, i < r < s and
(a1, a2,· · ·, ai,· · ·, ar, ar+1,· · ·, as,
· · ·, an)wherear = 0,ak = 1,∀k 6=r. Now, consider the
marking vector(a1, a2,· · ·, ai−1,0, ai+1· · ·, ar, as,· · ·, an),
whereaj = 1,∀ j 6= i. At this marking, tr is enabled and
fires, whence we get(a1, a2,· · ·, ai−1,0, ai+1,· · ·, ar−1 ,0, ar+1,· · ·, an), whereaj = 1,∀j 6= i, r. Similarly, at the
marking vector (a1, a2,· · ·, ai,· · ·, ar−1,0, ar+1,· · ·, an),
wherear = 0, aj = 1, ∀j 6= r, the transitionti is enabled
and after firing gives the marking vector(a1, a2,· · ·, ai−1, 0, ai+1· · ·, ar−1,0, ar+1,· · ·, an), whereaj = 1,∀j 6= i, r
which is obtained again, a contradiction to our initial assump-tion aboutN. The same arguments hold when|C2|>4, i.e.,C2 has more than2components ofN0.
Case 2: The above arguments imply that every component ofN has at least two components ofN0
. But, then the argument given in Subcase2above leads us to the same contradiction.
It follows thatNis connected. Therefore,Nshould have at least |N|
one place. Suppose there exists no transition joined by self-loops to all but one of the places inN. This implies, there is a transition sayt1 not joined by self-loops to at least two places, namely to p1and one other place sayp2. Since,Ngenerates all the binary n−vectors as marking vectors, in particulara= (0,1,1,· · ·,1)
andb= (1,0,1,· · ·,1)are generated byN in the first stage of
firing. Now, the vectoraat whicht2is enabled and fires giving rise to vectora0= (0,0,1,· · ·,1), is also obtained by firingt
1 atb, a contradiction to our assumption aboutNthatNis crisp. Thust1 is joined to all the placespi by self-loops exceptp1. Next, suppose there existstj,j6= 1, joined by self-loops, to all
but one of the places, in particulartjwill be joined top1 by a self-loop. Then, there is an SCC formed by the placesp1andpj
and transitionst1 andtj respectively. This contradicts Lemma
1. Now, we claim there exists a transition joined by self-loops to all but two of the places. Suppose this is not true, i.e., there ex-ists a transition which is not joined by self-loops to at least three places. Without loss of generality, supposet2is such a transition. Sincet2is not joined by self-loops top1,p2andp3, letpjbe a
placej6= 1,2,3to whicht2is joined by a self-loop. Since,N generates all the binaryn-vectors as marking vectors, in
particu-larc= (1,1,0,1,· · ·,1)andb= (1,0,1,· · ·,1)are generated
byNin the first stage of firing. Now, the vectorcat whicht2is enabled and fires giving rise to vectorc0= (1,0,0,1,· · ·,1)(as t2is not joined by self-loop top2) is also obtained by firingt3at b, a contradiction to our assumption aboutNthat it generates all the binaryn-vectors exactly once, establishing the contradiction to our assumption thatNis crisp Boolean. Thust2is joined by self-loops to all but two of the places. These two places arep1 andp2 because(pi, ti)is not a self-loop,∀ iand if(p1, t2)is a self-loop then SCC will be found which contradicts Lemma 1. Next supposetj,j6= 1,2, is joined by self-loop to all but two of
the places then in the structure of Petri net SCC will be formed which contradicts the Lemma 1. Continuing these arguments, in general that for eachj,1≤j≤n,tjis joined by self-loops to
exactlyn−jplaces.
ThusN ∼= N∗
n,n is the unique minimum crisp Boolean Petri
net.
4. CONCLUSIONS AND SCOPE
The existence and uniqueness of minimum crisp Boolean Petri nets. A computationally good characterization of such Petri nets in general is highly desirable since the instances where we need such Petri nets for applications are imaginably (as well as ar-guably) large in number as pointed out in [2]. This has been a hotly pursued research problem. The general problem of charac-terizing such a1-safe Petri netNis still open.
5. REFERENCES
[1] Petri, C.A.,Kommunikation mit automaten, Schriften des Institutes fur Instrumentelle Mathematik, Bonn 1962. [2] Kansal, S., Singh, G.P. and Acharya, M.,On Petri nets
gen-erating all the binary n-vectors, Scientiae Mathematicae Japonicae,71(2), 2010, 209-216.
[3] Kansal, S., Singh, G.P. and Acharya, M.,1-Safe Petri nets generating every binary n-vector exactly once, Scientiae Mathematicae Japonicae,74(1), 2011, 29-36.
[4] Peterson, J.L.,Petri net Theory and the Modeling of Sys-tems, Englewood Cliffs, NJ: Prentice-Hall, Inc., 1981. [5] Harary, F.,Graph theory, Addison-Wesley, Massachusettes,
Reading, 1969.
[6] Jensen, K.,Coloured Petri nets,Lecture notes in Computer Science, Springer-Verlag, Berlin,254, 1986, 248-299. [7] Reisig, W.,Petri nets, Springer-Verleg, New York, 1985. [8] Murata, T.,Petri nets: Properties, analysis and applications,
Proc. IEEE,77(4), 1989, 541-580.
[9] Kansal, S., Acharya, M. and Singh, G.P., Boolean Petri nets. In:Petri nets — Manufacturing and Computer Sci-ence(Ed.: Pawel Pawlewski), 381-406; Chapter 17. In-Tech Global Publisher, 2012, ISBN 978-953-51-0700-2. [10] Singh, G.P.,Some advances in the theory of Petri nets,