14th International Conference on Wireless Communications, Networking and Mobile Computing (WiCOM 2018) ISBN: 978-1-60595-578-0
Integer Ambiguity Resolution Algorithm Based On Different
Baseline Method
Shengge Zhang1, Naiping Cheng and Shuyan Ni
ABSTRACT
Carrier phase observation can greatly improve the accuracy of navigation and positioning, but the existence of ambiguity will seriously affect the accuracy of the results. This paper analyzes the advantages and disadvantages of LAMBDA algorithm for integer ambiguity resolution. The problem of constructing search domain leads to long search time. An algorithm of integer ambiguity resolution based on long baseline and short baseline is proposed. By comparing the results of the algorithm, the applicability and accuracy of the algorithm are analyzed.
Keywords: LAMBDA algorithm, integer ambiguity resolution, integer ambiguity resolution based on
long baseline and short baseline
1 INTRODUCTION
Satellite navigation and positioning technology can be divided into pseudo-range observation and carrier phase observation according to different signals. Pseudo-range observation is affected by errors, which will lead to large measurement errors and cannot be used in high-speed attitude measurement. Therefore, high-precision attitude measurement generally uses carrier phase observation.
Carrier phase observation determines the distance between satellites by tracking the phase difference between the satellite signal and the reference carrier signal generated by the receiver oscillator, and determines the position of the antenna.
However, the receiver's phase discriminator cannot obtain the number of integer wavelengths between the carrier wave and the antenna of the navigation satellite and the ground receiving station by the current phase value. At this point, the carrier phase solution will appear an unknown quantity, which is called carrier phase observation ambiguity. The existence of integer ambiguity has a great influence on the accuracy of carrier phase observations. In order to
1
get more accurate navigation information, we need more accurate carrier phase observations.
At present, the ambiguity resolution is mainly based on the search domain search algorithm, LAMBDA algorithm is the most widely used and highly efficient method. The main idea is search method based on least square method. In order to improve the efficiency of the search, the covariance matrix based on the least square search method is processed to reduce the ambiguity correlation. Although the LAMBDA[1] algorithm can get the result of computation more accurately. However, it needs the results of multiple epochs to construct the search domain, which is not conducive to the real-time calculation of carrier phase.
In addition to using pseudo-range observations and LAMBDA algorithm, a new method can be constructed by using the angle relation of the baseline vector in the station-centered coordinate system.
This paper analyzes the basic principle of carrier phase positioning technology and integer ambiguity search algorithm, mainly LAMBDA[1] algorithm. And the corresponding MATLAB simulation is carried out to compare the performance of LAMBDA algorithm and the whole ambiguity search domain (i.e. search performance) under the length limit method, which can provide a reference for the selection of the whole ambiguity solution scheme.
2 LAMBDA ALGORITHM
The carrier phase observation[2] model is shown in formula, in which y is
1
n dimension carrier phase measurement, a is m1 dimension integer ambiguity, b is t1baseline vector, A, B are the corresponding integer
ambiguity degree and baseline vector coefficient matrix..
n t
y
Aa Bb v
a Z
b R
,
(1)
The least squares algorithm[3] obtains the estimated value of the parameters by minimizing the sum of squares of the errors. The least squares algorithm is used to estimate the unknown quantity of the carrier phase observation model. Then the standard least squares estimate is converted to integer least squares estimation. Integer least squares model is shown in formula.
,
2 min
a b
y y A B
Q
a b (2)
Orthonormal decomposition(2) gives
1 1 1
,
2 2 2
2 min
|| || || || || ||
y b a
a b y
Q Q Q
n t y A B Q
e b b a a
a Z b R
a b , (3)
e is the residuals of the general least squares, ande y= AaBb, Its quadratic
form is fixed value.so the Equation is maximized when 1 2 | ||
|
Q a aa
and
bb.
The algorithm of integer least squares estimation is usually divided into two steps:
(1)In the first step, the integer property of the ambiguities a is disregarded and the so-called float LS estimates together with their variance-covariance matrix are computed.
(2) In the second step, the float ambiguity estimate a is used to compute
the corresponding integer ambiguity estimate, denoted as:
1 2
)T a ) aa Q aa
( ( (6)
(3) The third step is optional. It consists of deciding whether or not to accept the integer solution once integer estimates of the ambiguities have been computed. Several such tests have been proposed in the literature, cf. (Abidin 1993; Chen 1997; Euler and Schaffrin 1991; Han and Rizos 1996; Han 1997; Landau and Euler 1992; Tiberius and De Jonge 1995; Wang et al. 1998). Examples currently used in practice include the Ratio Test, the F-Ratio Test, the
1 1 , 2 2 2 min || || || || y a
a b y
Q Q
y A B
Q
e a a
a b
(4)
a b a ab ba bb Q Q Q Q
Difference Test and the Projector Test. These and other tests can be cast in the framework of Integer Aperture estimation, (Verhagen and Teunissen 2006; Teunissen and Verhagen 2011), which unifies steps 2 and 3 as described here.
3 LONG AND SHORT BASELINE ALGORITHM
Taking the receiver as a reference, the carrier phase singular difference equation of the receiver and the receiver measuring the satellite s can be expressed as follows[3]:
0 0 0 , 0
+
i i i i
s s s s
r r r r Nr r r r
(7)
In the form 0 0
-i i
s s s
r r r r
, 0 0
=
-i i
s s s
r r r r
, i 0 i 0
s s s
r r r r
N N N
, ,i 0 s
r r
is the
carrier phase is single difference noise. is the carrier wavelength.rs is the
geometric distance[4] between the receiver r antenna phase center and the
satellite s Antenna Phase center.
s r N
is Carrier phase ambiguity measurement
between receiver R and satellite s. ,
s r
is carrier phase measurement error.
In the short baseline model, the unit line-of-sight vector of the receiverri
and receiverr0 to the satellite s is same, which was denoted as
s
e ,we can get
=1
s
e
The geometric representation of the single difference model[5] is shown in Figure 1.
According to the geometric relationship, the geometric distance difference
between the receiverri and receiverr0 to the satellite scan be expressed as the
carrier phase difference equation can be written as the following formula[6]:
0 0 , 0
+
i i i
s
s i s s r r Nr r r r
e b (
Receiverr0 Receiverr1
Satellite s
Figure.1. Geometric schematic diagram of single difference model between receivers.
(1)The first short baseline attitude determination method[7]:
The length of the first baseline vector is less than half the carrier wavelength, which we call the ultra short baseline. The first baseline is composed of antennas and antennas. The distance between antennas and antennas should meet the following conditions:
1
2
d
(9) The carrier phase single difference can be decomposed into integer parts
and fractional parts. The integral part[8] 1 0,
s r r int
and the fractional part 1 0,
s r r frac
are divided into:
1 0, 1 0 1 0
s s s
r r int round r r Nr r
1 0 1 0
1 ,
s
s s
r r frac frac r r
e b (10)
From the mathematical model deduction, if the number of visible satellites
is m, then using the least square algorithm, we can solve the baseline vectorb1
11 1 1 1 1
T T
b H H H y
(11)
We can obtain Elevation angle and azimuth angle after get b1.
(2)The second short baseline attitude determination method:
After get Elevation angle and azimuth angle and b1The rough value of the
second baseline vectorb2 in the local ENU coordinate[10] system can be
estimated by the relationship between the baseline vector and the attitude angle. Then, according to the single-difference equation of carrier phase, the sum of single-difference ambiguity estimates can be obtained.
2 0 2 0
2
ˆ ˆs s + s
r r r r
N
e b (
12)
By rounding the estimated ambiguity, the ambiguity can be obtained[11]:
2 0 2 0 2 0
2
ˆ
ˆ + s
s s s
r r r r r r
N round N round
e b
(13) We can get the final result.
4 SIMULATION AND ANALYSIS
It is known that the wavelength of GPS satellite L1 signal is 0.192m, so the
length of short baseline must be satisfied 1 2
l
, that is mean l10.096, the
length of short baseline is 0.09m, and for long baseline, as long as it is multiple of short baseline. For convenience of calculation, the long baseline is 20 times
that of the short baselinel2 1.8, that is, M. Six satellites were selected for
satellite 1 satellite 2
satellite 3 satellite 4
[image:7.595.121.458.93.552.2]satellite 5 satellite 6
Figure 3. Results of integer ambiguity resolution
The long-short baseline method is mainly to get a rough baseline vector by measuring the short baseline, using this rough baseline vector to obtain the elevation and azimuth of the carrier. Using the length relationship between the long baseline and the short baseline, the vector of the long baseline is constructed and the final solution is completed. Therefore, the accuracy of the algorithm is based on how to accurately obtain the attitude angle of the carrier.
The solution of short baseline vectors is:
11 1 1 1 1
T T
b H H H y
(14)
In general,
1, 2, ,
1
1
, , , T
T T m T
H = e e e
the direction vector in the matrix
1
H isem T, 0, the satellite is not at the top of the reference station. The
[image:8.595.172.404.496.682.2]elevation angle and azimuth angle of the carrier can be better obtained by observing the carrier phase of short baseline. However, when the reference station is perpendicular to the direction of the satellite signal, zero elements appear on the diagonal line of the direction vector at this time, and serious magnification problems will occur in the computer. At this time, the original invariant attitude angle has changed greatly, and then continue to use the solution of the attitude angle to solve the model. Paste error will be greater.
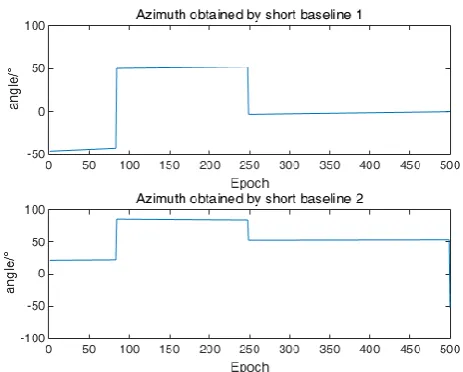
As can be seen from Figure 4, the azimuth fluctuates greatly during a certain period of time, which leads to a great difference between the long-short baseline method and LAMBDA algorithm. The azimuth angle of the follow-up tends to be stable, and the ambiguity of the follow-up is almost the same as that of LAMBDA algorithm. It is assumed that in order to solve the ambiguity of the whole circumference when large errors occur, it is necessary to directly use the spatial information to solve the attitude angle. To make up for the problem caused by the angle error.
4 CONCLUSION
In the process of navigation and positioning using carrier phase observation, the accuracy of carrier phase affects the final result. This paper describes in detail the two algorithms of integer ambiguity resolution. The whole ambiguity resolution process is simulated by the long baseline method and the LAMBDA algorithm. Through the results, we can find that the long baseline method can improve the efficiency of calculation to a certain extent. However, when the angle between the antenna and the satellite is within a certain range, it will lead to large errors in the calculation results. The correctness of integer ambiguity resolution is affected. This effect needs further research and simulation.
REFERENCES
[1] Teunissen P J G. The least-squares ambiguity decorrelation adjustment: a method for fast
GPS integer ambiguity estimation[J]. Journal of Geodesy, 1995, 70(1-2):65-82.
[2] Blewitt G. Carrier Phase Ambiguity Resolution for the Global Positioning System
Applied to Geodetic Baselines up to 2000 km. Journal of Geophysical Research, Vol. 94,
No. B8, pp. 10.187-10.203[J]. Journal of Geophysical Research Atmospheres, 1989,
94(B8).
[3] Laurichesse D, Mercier F, Berthias J P, et al. Integer Ambiguity Resolution on
Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise
Orbit Determination[J]. Navigation, 2009, 56(2):135–149.
[4] Feng S Z, Yong ting W U, Tang Q H. Principle And Application of Ultrashort Baseline
Acoustic Positioning System[J]. Coastal Engineering, 2002.Huang L, Tianjin. On
Neu(Enu) Coordinate System[J]. Journal of Geodesy & Geodynamics, 2006.
[5] Morgado M, Oliveira P, Silvestre C. Tightly coupled ultrashort baseline and inertial
navigation system for underwater vehicles: An experimental validation[J]. Journal of
[6] Teunissen P J G. The probability distribution of the GPS baseline for a class of integer
ambiguity estimators[J]. Journal of Geodesy, 1999, 73(5):275-284.
[7] Civicioglu P. Civicioglu, P.: Transforming geocentric cartesian coordinates to geodetic
coordinates by using differential search algorithm. Comput. Geosci 46, 229-247[J].
Computers & Geosciences, 2012, 46(3):229–247.W.C.Lü, S.Q. Xu. Kalman filtering
algorithm research for the deformation information series of the similar single difference
model[J]. Journal of China University of Mining\s&\technology, 2004, 14(2):189-194.
[8] Ou Jikun, Wang Zhenjie. An improved regularization method to resolve integer ambiguity
in rapid positioning using single frequency GPS receivers[J]. Science, 2004,
49(2):196-200.
[9] Park C, Kim I. Integer ambiguity resolution for GPS based attitude determination
system[C]// Sice '98. Proceedings of the, Sice Conference. International Session Papers.
IEEE, 1998:1115-1120.
[10] Park C, Kim I, Lee J G, et al. Efficient technique to fix GPS carrier phase integer
ambiguity on-the-fly[J]. IEE Proceedings - Radar, Sonar and Navigation, 2002,
144(3):148-155.
[11] Luo X, Ou J, Yuan Y. Regularization approach for fast integer ambiguity resolution of
medium-long baseline GPS network RTK[J]. Transactions of Nanjing University of