2018 2nd International Conference on Applied Mathematics, Modeling and Simulation (AMMS 2018) ISBN: 978-1-60595-580-3
Application of Particle Swarm Optimization Algorithm in Geomagnetic
Matching Navigation
Shi-xin LI
1, Ru-yi CAI
1, Chao-nan FAN
1and Xiang-zuo HUO
21College of Electronic Engineering, Tianjin University of Technology and Education,
Tianjin, China 300222
2College of Mechanical and Electrical Engineering, Xi'an University of Architecture and Technology,
Xian, China 710055
Keywords: Geomagnetic matching, Geomagnetic profile, Particle swarm optimization, ICP algorithm.
Abstract. In order to improve the positioning accuracy of the traditional geomagnetic matching algorithm, a new geomagnetic matching algorithm based on particle swarm optimization is proposed. The algorithm plans the search range of the real position centering on the measurement position of the reference navigation system. Extracting the corresponding geomagnetic data from the reference geomagnetic map, the particle swarm optimization algorithm is then introduced into the matching region search, and the obtained geomagnetic profile values are taken as particles in the particle population. On this basis, the normalized product correlation function is used as the particle fitness function, comparing the similarity between the reference sub graph and the real-time graph profile by the maximum fitness measure, Finally, through simulation analysis, the matching precision and matching time of matching algorithm based on ICP and PSO are compared. The simulation results show that the matching effect based on PSO algorithm is better than the traditional ICP algorithm. Although the matching time is slightly longer than the ICP algorithm, it meets the real-time requirements. Geomagnetic correlation matching algorithm is an extremely important type of algorithm in geomagnetic aided navigation algorithm. The current research focuses on the improvement of the traditional Terrain Contour Matching (TERCOM) algorithm metric function and the introduction of new metric functions and various ICP geomagnetic matching algorithms [1-4].The geomagnetic correlation matching algorithm of the aircraft not only requires high precision and high reliability, but also the execution efficiency of the algorithm is one of the important contents of the research. Based on the research of traditional geomagnetic correlation matching algorithm, this paper introduces particle swarm optimization algorithm into geomagnetic correlation matching algorithm. From the aspects of similarity measure function, geomagnetic matching feature quantity and search strategy, a new method of geomagnetic correlation matching for aircraft is proposed.
The Origin of Particle Swarm Algorithm
Particle Swarm Optimization (PSO) algorithm is a global random search algorithm based on swarm intelligence proposed by Kennedy and Eberhart inspired by the results of artificial life research to simulate migration and clustering behavior during the foraging of birds. All kinds of organisms in nature have certain group behaviors, and one of the main research fields of artificial life is to computers. The group behavior of birds and fish in nature has always been a research interest of scientists. The biologist Craig Reynolds proposed a very influential bird clustering model in 1987. In his simulation, each individual follows:
(1) Avoid colliding with neighboring individuals. (2) Matching the speed of the neighboring individuals.
(3) Fly to the center of the flock and the entire group flies to the target.
Geomagnetic Matching Algorithm Design Based on Particle Swarm Optimization
[image:2.595.216.378.194.280.2]The geomagnetic matching algorithm based on particle swarm optimization refers to a method for estimating the position coordinates of the carrier position in the reference geomagnetic map by using the geomagnetic value sequence data of the sensor measured in real time. When the aircraft is in certain specific geomagnetic areas on the route, the geomagnetic measurements along the route are measured using equipment such as geomagnetic sensors. The measured real-time geomagnetic map is correlated with the geomagnetic profile indicated by the pre-stored reference map, and the geographical position of the aircraft is determined according to the best correlation.
Figure 1. Composition of geomagnetic matching system.
[image:2.595.185.412.404.498.2]In the matching area, the aircraft maintains a certain route. During the real-time map measurement process, the speed information of the navigation system is used to control the interval, and the pointed position of the sampling point represents the shape of the real-time map. To facilitate the matching search, as shown in FIG. 2, the sampling interval in the direction of the geographic coordinate axis takes the reference image element size, and the sampling point position is discretized to correspond to the nearest neighboring grid.
Figure 2. Real-time image measurement and schematic diagram of positioning shape of profile.
During the geomagnetic matching process, the position indicated by the inertial navigation is centered. A square area that is adapted to the maximum allowable navigation error is defined as a search area, as shown in Figure 3. The actual search area is determined based on the indicated position of the INS and the size of the positioning error. In Figure 3, P is the position indicated by the current INS. is the standard deviation of the navigation error, The actual search range is a rectangular region of 6 ×6 centered on P.
Figure 3. True search region scope of magnetic matching.
[image:2.595.241.360.615.705.2]yi(i = 1,2, … , N)
are the reference and measured section pixels, respectively. Because there may be differences between the real-time graph and the reference sub graph, the correlation metric is usually used when comparing the degree of similarity between the two profiles. Therefore, the particle fitness function in the paper uses the Normal Production Correlation Algorithm (NPROD):
𝑁𝑃𝑅𝑂𝐷(𝑋, 𝑌) ≜ ∑Ni=1xiyi
[∑Ni=1xi2]1/2[∑Ni=1yi2]1/2 (1) NPROD (X, Y) is also given the best match by the largest value. The NPROD algorithm is actually defined by the cosine of the angle between the vectors X and Y. The PSO-based geomagnetic correlation matching algorithm of the aircraft is as follows:
(1) Centering on the position indicated by the INS, constructing the solution space with the maximum allowable navigation error of 6
as the radius. At the same time, the grid number Ngridin the 6
×6
region is calculated, and the initialized particle population is randomly generated in the solution space, and the population size is 0.3 Ngrid. The particles in the population are geomagnetic section pixel feature parametersTi,where i = 1,2, … M,correspondingly, each particle is randomly defined initially at a velocity of Vi.(2) To assess the pros and cons of particle position, introduce the fitness of particle Ti ,and calculate the fitness of each particle,The steps to solve the particle fitness are as follows:
① The i-th particle Ti is selected from the particle population as the characteristic parameter of the geomagnetic section pixel
② The obtained geomagnetic section pixel is used as a parameter, Substituting into the normalized product correlation function NPROD, Compare the degree of similarity between the reference subgraph and the real-time graph profile, Find the objective function𝑓(Ti),of the particle,And as the fitness of the particle fitness(x, y) = NPROD (X, Y).
(3) Compare the size of the fitness function, according to the fitness function of each particle, Record the best position that the particleTiindividual has searched so far asPbest,Record the best position that the entire particle swarm has searched so far asgbest.
(4) Adjust the velocity and position of the particles according to the following two formulas:
vi(k + 1) = ωvi(k) + c1r1[𝑃best− xi(k)] + c2r2[gbest− xi(k)] (2)
xi(k + 1) = xi(k) + Kvi(k + 1) (3) Where:c1and c2are learning factors, usuallyc1 = c2 = 2;ω is the inertia factor, inertia weight (or momentum coefficient) is used to control the effect of the previous speed on the current speed.
r1and r2are uniform random numbers in the range [0,1].𝑣𝑖 is the velocity of the particle, and[𝑣𝑚𝑖𝑛 , 𝑣𝑚𝑎𝑥]is a constant, which is set by the user to limit the velocity of the particles.
(5) Repeat the process of (2)~(4) above, Iterative algebra condition until the fitness function is optimal or the termination is satisfied.
Simulation Analysis of Geomagnetic Matching of Aircraft Based on PSO
Table 1. Parameters of the motion model of the carrier.
Initial position Transverse axis (longitude) 110.0952°
Longitudinal axis (latitude) 42.0500°
Initial velocity X axis 6m/s Y axis 8m/s Acceleration X axis 0m2/s
Y axis 0m2/s
Table 2. Output parameter table of inertial navigation system.
Parameters of geomagnetic sensor: Sampling time interval: 10s; Sampling times: 20times; Measurement noise of magnetic sensor: 1nT.
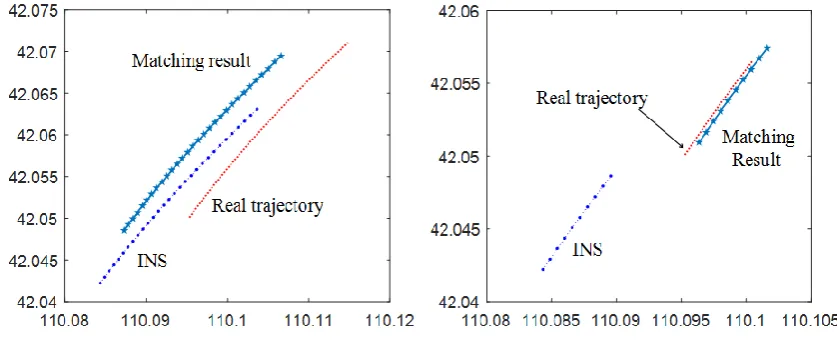
With the various parameters given in Table 1 and table 2 above, the motion state of the carrier in the matching period can be determined. The Figure 4 shows the track formed by the traditional ICP geomagnetic matching algorithm and The Figure 5 shows the trajectory formed by a new PSO geomagnetic matching algorithm.
[image:4.595.85.504.366.536.2]Figure 4. Geomagnetic matching results based on traditional ICP algorithm.
Figure 5. Geomagnetic matching results based on PSO algorithm.
It can be seen from the above simulation results. The original setting error is 1500 meters, and the error is reduced to 921.5247 meters after the ICCP matching algorithm. The error is reduced to 200.5752 meters after the PSO matching algorithm. PSO-based geomagnetic matching assisted navigation can greatly reduce navigation matching errors. The error of the traditional ICP geomagnetic matching algorithm is reduced from about 900 m to about 200 m. Matching accuracy has increased nearly 4 times. The running time of the algorithm is less than that of the traditional ICP geomagnetic matching algorithm, and the accuracy is improved. Therefore, geomagnetic matching accuracy based on particle swarm optimization is better than traditional ICP geomagnetic matching algorithm. In practical applications, the geomagnetic matching algorithm based on particle swarm optimization should have more advantages.
Conclusion
The paper improves the traditional geomagnetic correlation matching algorithm from three aspects:
Initial position error of inertial navigation 1000m Deviation angle of initial position error of inertial navigation 120°
Inertial guidance acceleration error X axis 10
-4m2/s
geomagnetic field total intensity as the matching feature parameter and the introduced particle swarm optimization algorithm as the search strategy. The POS-based geomagnetic matching algorithm makes full use of the PSO optimization algorithm to have higher optimization efficiency, which can avoid the advantage that the search process falls into local minimum points. By using a normalized product correlation function as a particle fitness function, comparing the similarity between the reference subgraph and the real-time graph profile by the maximum fitness measure, the positioning accuracy of the traditional geomagnetic matching algorithm is improved. PSO-based geomagnetic matching assisted navigation can greatly reduce navigation matching errors and meet real-time requirements.
References
[1] Feng Hao-nan, Yang Zhao-hua, Fang Jian-cheng. Development and its application of geomagnetic aided navigation system [J]. Chinese Journal of Scientific Instrument, 2008, 29(4):640 -643.
[2]Liu Fei, Zhou Xian-gao, Yang Ye, Li Shixin. Geomagnetic matching location using correlative method[J].Journal of Chinese Inertial Technology, 2007, 15(1):59-62.
[3] Zhao Jian-hu, Wang Sheng-ping, Wang Ai-xue. An improved TERCOM algorithm for underwater geomagnetic matching navigation[J]. Science of Wuhan University (Geomatics and Information), 2009, 34(11):1320 -1322.
[4] Tong Yu-de, Bian Shao-feng, Jiang Dong-fang. Gravity matching simulation of real-time ICCP algorithm[J].Journal of Chinese Inertial Technology, 2011, l 9(3):340-343.
[5] Xu Zunyi, Wei Dong, Li Jing, et al. Simulation research on the correlation matching algorithm based on particle swarm optimization for aircraft geomagnetic aid navigation [J]. Ship Science and Technology, 2011, 33(11): 3-6. (in Chinese)
[6] Wang Shengping, Zhang Hongmei, Zhao Jianhu, et al. Marine geomagnetic navigation technology based on integration of TERCOM and ICCP [J]. Geomatics and Information Science of Wuhan University, 2011, 36 (10): 1209-1212. (in Chinese)