2017 International Conference on Mathematics, Modelling and Simulation Technologies and Applications (MMSTA 2017) ISBN: 978-1-60595-530-8
Modeling and Validation of Bolted Joints Based on Nonlinear
Virtual Material Method
Cheng YANG, Yong-sheng ZHAO
*Zhi-feng LIU and Li-gang CAI
Beijing Key Laboratory of Advanced Manufacturing Technology, Beijing University of Technology, Beijing, China
*Corresponding author
Keywords: Nonlinear virtual material, Bolted joint, Fractal theory, Dynamics mechanism.
Abstract. The bolted joint provides more than half of the stiffness and nearly all of the damping of the whole machine tool. It is necessary to study the dynamics mechanism and establish accurate model of joint surface. The paper proposes the model of nonlinear virtual material based on fractal theory and Hertz contact theory, the contact surface can be divided into several sections based on the pressure distribution, the elastic modulus and stress of each section can be calculated. An L-shaped specimen is designed to validate the accuracy of presented model. The maximum errors of natural frequencies between theoretical and experimental is 8.8%, suggesting that nonlinear virtual material method is appropriate for the bolted joint.
Introduction
The dynamic behavior of bolted joint has strong influence on the machining precision in mechanical industry. It is necessary to research into the dynamic mechanism of joint surface. The GW model [1] introduced by Greenwood and Williamson assumes that all asperities deform elastically, indicating that all asperities follow the Gaussian or exponential distribution. Majumdar and Bhushan [2] proposed the M-B fractal contact model to obtain the relationship of real contact area and normal load based on W-M function and Hertz contact theory. Compared to the GW and M-B models of bolted joint, the virtual material model has the advantages of modeling simply and analyzed easily with the ANSYS software. The dynamic model of bolted joint based on the isotropic virtual material method is introduced by Tian [3], Huang [4] adopted the virtual material method to make a modal analysis and verified the efficiency of the virtual material method for the bolted joint. Nevertheless, the contact pressure of joint surface was computed without considering to the influence of uneven pressure distribution. So the modeling of bolted joints based on nonlinear virtual material is proposed in this paper.
Nonlinear Virtual Material Method for Bolted Joint
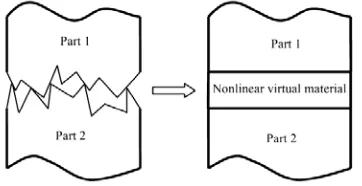
[image:1.612.215.396.603.696.2]The bolted assembly is composed three parts, which consists the part 1, part 2 and nonlinear virtual material in the middle, as shown in Fig. 1.
Figure 1. Virtual material model schematic drawing.
1 1
2 2 2
( ) 2
D D D
L L D
n a a a (0 a aL) (1)
Where D is the fractal dimension of the surface profile, is the domain extension factor, ais the area of an asperity and aRd, =2a arefers to the truncated area, and aL represents the truncated area of the largest elastic asperity.
The critical area ac for a single asperity demarcating the elastic and plastic regimes can be written by: 2 1 2 2 D c E a G H
(2) Where the equivalent elastic modulus 2 2 1
1 1 2 2
=((1- ) / (1- ) / )
E E E , where
1
,2,E1,E2, are the Poisson ratios and elastic moduli of two surfaces, respectively, His the hardness of the softer
material, for one asperity, the contact strain
can be given by:d R
(3)
Where d and R are the deformation and the equivalent radius of single asperity, respectively. According to the Hertz theory, the asperity is the elastic deformation, the normal load f can be given by:
1 3
* 2 2
4 3
f E R d (4)
The stress of one asperity can be expressed as:
1 3 * 2 2
* *
4 4 4
3 3 3
f E R d E d E
a Rd R
(5)
Based on the definition of elastic modulus, the elastic modulus of one asperity can be described as:
1
* 2 *
2 2
3 3
d R
e E E
d d
(6)
According to fractal theory, the deformation and the equivalent radius of single asperity can be obtained as:
1
1 2
D D
d G a (7)
1 2 2 D D G R a
(8)
Substituting Eqs.7 and 8 into Eq. 6, the elastic modulus of one asperity can be rewritten as:
1
* 1 2
2 3
D D
e E G a
(9)
The equivalent elastic modulus can be obtained by weighting the average of all asperities elastic modulus and the corresponding real contact area. The elastic modulus is zero when the asperity occurs plastic deformation, the asperity is an elastic deformation when the truncate area satisfies
c L
a a a, and the equivalent elastic modulus can be written as:
1
1 2
0 0
( ) 2
2 ( )
6 L L c c a D a a D a a
en a da
E E G a n a a da
A A
Where A0 is the normal area, substituting the Eq. 1 into Eq. 10, result in:
1 1
1
1 2 2 2 2
0 2 6
D D D
L L c
E DE G a a a
A (11)
The stress of the nonlinear virtual material is the sum of elastic asperity stress t and plastic asperity stresss .
The asperity is an elastic deformation when aac, the normal force can be obtained as:
3
* 1 2
4 3 2
D D t
f E G a
(12)
The truncated area satisfies a
a ac , L
when the asperity is an elastic deformation, the elastic asperity stress can be written as:( )
L c
a
t a n a f dat
(13) Substituting Eqs.1 and 12 into Eq. 13, is:3 3
1
* 1 2 2 2 2
2 3 2
D D D D
D
t L L c
D E G a a a
(14)
The asperity is a plastic deformation when aac, the normal force can be described as:
2 s
Ha
f Ha (15)
The truncated area satisfies a
0,ac
when the asperity is a plastic deformation, the plastic asperity stress can be written as:0 ( )
c
a
s n a f das
(16) Substituting Eqs.1 and 15 into Eq.16, we can obtain:1-2 1 2 2 2 D D D
s L c
DH a a
D
(17)
The total stress of the nonlinear virtual material can be obtained as:
t s
(18)
Validation of Bolted Joints Based on Nonlinear Virtual Material Method
[image:3.612.119.493.689.746.2]An L-shaped complex is designed to validate the presented model of bolted joint based on the nonlinear virtual material, the plane dimension of L-shaped is shown in Fig 2, the material type is QT600-3, and the value of thickness is 20mm. The contact surface are machined by milling with roughness Ra 1.6m. The L-shaped complex is composed of two specimens and connected by two M16 bolted. The material property of the L-shaped specimen is listed in Table 1.Based on the power spectrum density of a specimen surface, D1.28, G3.5 10 12, 2.04.
Table 1. The material property of the L-shaped specimen list.
Parameter name Parameter value
Density ρ(kg/m3) 7800
Elastic modulus E (Pa) 1.5E11
Poisson modulus 0.28
Figure 2. L-shaped specimen dimensional drawing (mm).
Figure 3. L-shaped complex.
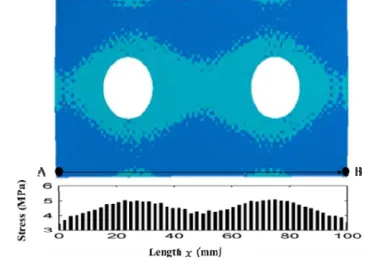
The elastic modules of virtual material is related to the contact stress, the contact stress distribution of joint surface can be obtained by the static analysis method. The stress nephogram and A-B stress distribution of joint surface when the pre-tightening force of each bolted is 10 kN, as shown in Fig 4, the result suggests that the contact stress distribution of contact surface is uneven, the maximum value of contact stress is 5.1MPa near the bolt hole and gradually to 3.2MPa at A point.
Figure 4. Stress nephogram and stress distribution A-B of L-shaped complex virtual material.
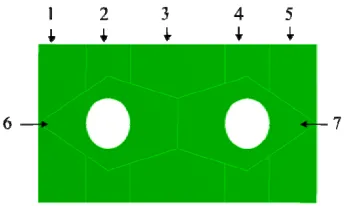
Since the pre-tightening of each bolt is equal, the pressure distribution is symmetrical, hence we can divided half of contact surface into 7 sections as shown in Fig. 5. Then the equivalent elastic modulus and contact stress of the nonlinear virtual material can be obtained as shown in Table 2.
Table 2. Stress and elastic modulus of different L-shaped complex virtual material areas.
Location 1 5 2 4 6 7 3
Stress (MPa) 4.16 4.55 5.13 4.74
[image:4.612.216.401.453.585.2] [image:4.612.148.468.670.720.2]Figure 5. Virtual material zones of L-shaped complex.
The L-shape complex is suspended to simulate the free degree of a freedom state to validate the accuracy of presented model. Eight piezoelectric accelerate sensor are placed evenly in the L-shape complex. An impact hammer is adopted to provide the excitation signal. The signals of the impact hammer and the sensors are collected and analysed by an LMS modal analyser. A finite element model for the L-shaped complex bolted joint is established in ANSYS software, the pre-tightening force can be loaded in the 1 and 2 for each bolt as shown in Fig 3. Table 3 presents the comparison results of experiment results and nonlinear virtual material model. The errors of 1st to 3rd mode natural frequencies are -3.1%, 8.8% and 2.3%. The results suggest that the proposed virtual material method has good agreement with those of experiment. Table 4 shows the finite element analysis and experimental vibration 1st to 3rd mode natural frequencies of L-shaped complex.
Table 3. Comparison of experiment results and nonlinear virtual material model.
f1 f2 f3
Experimental results 2205.05 2883.8 4497.43
Presented model 2272.50 3137.10 4396.40
[image:5.612.98.514.349.731.2]Error -3.1% -8.8% 2.3%
Table 4. Finite element analysis and experimental vibration mode of L-shaped complex.
order The proposed nonlinear virtual material modal shape The experimental modal shape
1
2
Summary
In this work, the contact model of bolted joints based on nonlinear virtual material method is presented for bolted joint. The equivalent elastic modulus and contact stress of the virtual material are defined based on fractal contact theory. The relationship between elastic modulus and contact stress of nonlinear virtual material is established indirectly. The maximum error of the theoretical and experimental natural frequency for the nonlinear virtual material is within 8.8%. This result indicates that the nonlinear virtual material method can be adopted to predict accurately the behavior of bolted joint.
Acknowledgement
This research was financially supported by National Natural Science Foundation of China (No.51375025), National Science and Technology Major Project of China (No. 2013ZX04013-011).
References
[1] Greenwood J.A., Williamson J.B.P. Contact of nominally flat surfaces. Proc R SocLondon, A 295(1966): 300–19.
[2] Majumdar A., Bhushan B. Fractal model of elastic-plastic contact between rough surfaces. ASME J Tribol 113(1991): 1–11.
[3] Tian H., Liu F., Fang Z. Immovable joint surface’s model using isotropic virtual material. J Vibr Eng;26(2013): 561–73.
[4] Huang K., Jin J. Research on bolt preload simulation based on virtual Material method. Mach Des Manuf 2012; (8): 148–50.