2016 Joint International Conference on Artificial Intelligence and Computer Engineering (AICE 2016) and International Conference on Network and Communication Security (NCS 2016)
ISBN: 978-1-60595-362-5
The Reconstruction Analysis Based on
Minimum Total Variation & Bregman Algorithm
Xin-Yu LIU
1,a,*, Gong-Liu YANG
1,b,
Yi-Ding SUN
1,c, Ya-Jie CHEN
1,d, Wei-Li CHEN
2,e1School of Instrumentation Science and Opto-electronics Engineering, Beihang University, Beijing, China
2Henan Huamin Power Design Co., LTD, Zhengzhou, Henan, China
a[email protected], b[email protected], c[email protected], d[email protected], e[email protected]
*Corresponding author
Keywords: Compressed Sensing, Minimum Total Variation, Bregman, Sparse Reconstruction.
Abstract. Image compressed sensing makes sparse signals information to reconstruct the optimal solution of original signals. The minimum total variation and Bregman algorithm transform constrained optimization problem of l1-norm into unconstrained optimization problems by increasing
punishment item. Sparse images make the iterative process more simple and rapidness. In this paper, by studying several kinds of reconstruction algorithm for image compressed sensing, the convergences and the speeds of these algorithms are analyzed.
Introduction
Compressed sensing is mathematical framework that concerns accurate recovery of a signal vector of xRN from a small set of measurements yRm with mN [1-2], where a carefully chosen
sensing matrix [3] m N
AR :
A
y = x. (1)
As m N, recovering the signal x from the measurement y given by (1) needs add penalty term
[4-5], which is
22
min
N R
x R J x Ax y . (2)
A. Minimum total variation algorithm
Minimum total variation algorithm[6] tries to get the most optimal solution for
2
2 1
minJ yA TV
x x x x (3)
Where ( )2 ( )2
i+1, j i, j i, j+1 i, j
i, j
T V(x) =
x - x x - x . The new half-quadratic regularization andconjugate gradient in [7,8] solveJ
x with total variation term which denotes CSTV :while(err>tolerance &&n<the number of iteration) 1.n+1,up =x ;
2.
n 1 (( )) / 2( )x x x
k k
b D xn D xn ,
n 1x (( y )) / 2( )kk
y
b D xn D xn ;
3 1
1 diag
n x
x bn
B , 1
1 diag
n y
y bn
B , n1 T n1 T n 1
x x x y y y
C D B D D B D ;
4 (ATA2Cn1)xn1ATy;
5.err=xn1-up
End
B. Split bregman
Split bregman algorithms in [9-10] propose unconstrained optimal problems, such as
1
xargmin
( )x H x ,Where the function Hkeeps convex,
is convex and differentiable [9].Then,
1
, argmin H subject to
(x d) d x ( )φ x d (4)
We obtain unconstrained problem by means of adding l2- norm [9-10] :
1 2 arg min 2 H ( )x d x d φ x (5)
in which x replacesd .Using split Bregman, we updatex byCSsplitBregman
11 ( ( ))
k T T
A A E A
k k
x y d b . (6)
C. Sparse image reconstruction
Assuming matrix D represent sparse manipulation [11-12], DT transform sparse image into
original image. ConsideringαDx, so α is called the sparse representation of image x. Next, if the penalty term J
x Dx,then modeling of sparse reconstruction2
1 2 2
argmin A
x Dx x y (7)
denotes CSSSB1. Updating x by split Bregman
1 ( ) (1 ( ))
k T T T
A A E A
k k
x y D d b . (8)
If algorithms optimize sparse image constantly, then get the optimal solution, finally, restore image with the help of x D T
. It simplifies the complexity of the algorithm matrix, and accelerate thespeed of the algorithm called CSSSB2.
2
1 2 2
T
argmin A
α= α D α y . (9)
To solve the reconstruction modeling, linear Bregman are introduced [13]. If J
x α, iterative
1 1
k k T T T k
c c DA AA( E) AD α y (10)
2
1 1
1 2
k
argmin c
k
α α α . (11)
1
T
AA
E ( ) is control item to accelerate convergence. Finally,x D TαN.
Results and Discussions
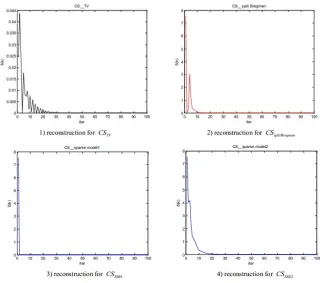
[image:3.612.130.488.245.335.2]Experiment 1 Simulation
Figure 1. Simulation for DMU.
MN measurement matrix is extracted from sample matrix with single pixel camera experiment in Rice University, test data by yk Axk Set M 2048, N 4096, K 10, F 2. The simulation
results of algorithms are given in Fig 1. Fig 2 shows the convergences of CSTV ,CSsplitBregman,CSSSB1
and CSSSB2.
[image:3.612.149.469.433.716.2]Experiment 2 Measurement Data Reconstruction
[image:4.612.154.465.122.204.2]Measurement data obtained by experiment Rice single pixel camera makes. The reconstructed data experiments based on CSTVand CSSSB2are given in Fig 3.
Figure 3. Synthetic data reconstruction.
0 10 20 30 40 50 60 70 80 90 100
0 0.005 0.01 0.015 0.02 0.025 0.03
CS__TV&CS__sparse model2 reconstruction for R
iter
(
k)
[image:4.612.338.499.252.385.2]CS-TV CS-Model2
Figure 4. Convergence for CSTVand CSSSB2.
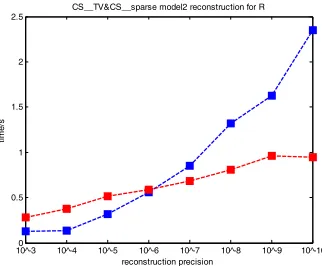
10^-30 10^-4 10^-5 10^-6 10^-7 10^-8 10^-9 10^-10 0.5
1 1.5 2 2.5
CS__TV&CS__sparse model2 reconstruction for R
reconstruction precision
tim
e/s
Figure 5. The relationship between accuracy and time.
Conclusion
Compared to other algorithm, Minimum total variation always maintains good convergence for different images and measurement data, and can obtain fine quality of images, which are susceptible to the effects of measurement noise. For split Bregman, the parameters of μ and determine the qualities of images recovery, precision and the speed of convergence. Likewise, the control
item T T 1
A AA E
D ( ) controls the performance of algorithm. Fig 4 shows the speeds of convergence for CSTVand CSSSB2.
The relationship between concex accuracy and time is given in Fig 5.
Acknowledgement
This research was financially supported by the National Science Foundation.
References
[1] Yonina C. Eldar, Gitta Kutyniok. Compressed sensing theory and applications., Cambridge University Press, England, 2012.
[2] Foucart S., Rauhut H. A mathematical introduction to compressive sensing, Birkhäuser, Boston, 2013.
[image:4.612.105.272.252.385.2][4] Herzet C., Drémeau A. Bayesian Pursuit Algorithms 1474-1478, 2010.
[5] Schniter P., Potter L.C., Ziniel J. Fast Bayesian matching pursuit, Information Theory and Applications Workshop. 326-333, 2008.
[6] Candès E.J., Guo F. New multiscale transforms, minimum total variation synthesis: Applications to edge-preserving image reconstruction, Signal Processing. 82(11): 1519-1543, 2002.
[7] Mouyan Zou. Deconvolution and signal recovery, National defense Industry Press, Beijing, 2001.
[8] Gen Li, Chunan Tang, et al. High-efciency improved symmetric successive over-relaxation preconditioned conjugate gradient method for solving large-scale finite element linear equations, Applied Mathematics and Mechanics. 34(10) 1225-1236, 2013.
[9] Xu Y., Huang T.Z., Liu J., et al. Split Bregman iteration algorithm for image deblurring using fourth-order total bounded variation regularization model, Journal of Applied Mathematics. 2013(3) 417-433, 2013.
[10] Goldstein T., Osher S. The split Bregman method for L1-regularized problems, SIAM Journal on Imaging Sciences. 2(2) 323-34, 2009.
[11] Rubinstein R., Zibulevsky M., Elad M. Efficient implementation of the K-SVD algorithm using batch orthogonal matching pursuit, CS Technion. 40(8) 1-15, 2008.
[12] Indyk P. Explicit constructions for compressed sensing of sparse signals, Proceedings of the nineteenth annual ACM-SIAM symposium on Discrete algorithms, Society for Industrial and Applied Mathematics. 30-33, 2008.
[13] Yin W., Osher S., Goldfarb D., et al. Bregman iterative algorithms for l1 minimization with