doi:10.4236/am.2011.25072 Published Online May 2011 (http://www.SciRP.org/journal/am)
Multi-Item EOQ Model with Both Demand-Dependent
Unit Cost and Varying Leading Time via Geometric
Programming
Kotb A. M. Kotb1, Hala A. Fergany2 1
Department of Mathematics and Statistics, Faculty of Science, Taif University, Taif, Saudi Arabia
2
Department of Mathematical Statistics, Faculty of Science, Tanta University, Tanta, Egypt
E-mail: [email protected]
Received March 10, 2011; revised March 17, 2011; accepted March 21, 2011
Abstract
The objective of this paper is to derive the analytical solution of the EOQ model of multiple items with both demand-dependent unit cost and leading time using geometric programming approach. The varying purchase and leading time crashing costs are considered to be continuous functions of demand rate and leading time, respectively. The researchers deduce the optimal order quantity, the demand rate and the leading time as de-cision variables then the optimal total cost is obtained.
Keywords:Inventory, Geometric Programming, Leading Time, Demand-Dependent, Economic Order Quantity
1. Introduction
The problem of the EOQ model with demand-dependent unit cost had been treated by some researchers. Cheng [1] studied an EOQ model with demand-dependent unit cost of single-item. The problem of inventory models involv-ing lead time as a decision variable have been succinctly described by Ben-Daya and Abdul Raouf [2]. Abou- El-Ata and Kotb [3] developed a crisp inventory model under two restrictions. Also, Teng and Yang [4] exam-ined deterministic inventory lot-size models with time-varying demand and cost under generalized holding costs. Other related studies were written by Jung and Klein [5], Das et al. [6] and Mandal et al. [7]. Recently, Kotb and Fergany [8] discussed multi-item EOQ model with varying holding cost: a geometric programming approach.
The aim of this paper is to derive the optimal solution of EOQ inventory model and minimize the total cost function based on the values of demand rate, order quan-tity and leading time using geometric programming tech-nique. In the final a numerical example is solved to illus-trate the model.
2. Notations and Assumptions
To construct the model of this problem, we define the
following variables: r
D = Annual demand rate (decision variable). pr
C
C = Unit purchase (production) cost.
hr = Unit holding (inventory carrying) cost per item per unit time.
or
C = Ordering cost.
SS = K Lr = Safety stock.
n = Number of different items carried in inventory. r
L Q
= Leading rate time (decision variable).
r = Production (order) quantity batch (decision vari-able).
TC
D Q Lr, r, r
= Average annual total cost. For therth item.
The following basic assumptions about the model are made:
1) Demand rate r is uniform over time. 2) Time horizon is finite.
D
3) No shortages are allowed.
4) Unit production cost
b,p r r p r r
C D C D
1, 2 3, , , 1
r , n b
b
is inversely related to the de-mand rate. Where is called the price elasticity.
5) Lead time crashing cost is related to the lead time by a function of the form R L
r Lr,r1, 2 , 3,, ,n0, 0 0 5.
func-K. A. M. KOTB ET AL. 552
tion.
6) Our objective is to minimize the annual relevant to-tal cost.
3. Mathematical Formulation
The annual relevant total cost (sum of production, order, inventory carrying and lead time crashing costs) which, according to the basic assumptions of the EOQ model, is:
1 2 n rr r r r pr r or
r r
r r
r hr r
r D
TC D ,Q ,L D C D C
Q
Q D
K L C R L
Q
(1)Substituting Cp r
Dr and R L
r into (1) yields:
11
2
n
b r
r r r r pr or
r r
r r
r hr r
r D
TC D ,Q ,L D C C
Q
Q D
K L C L
Q
(2)To solve this primal objective function which is a convex programming problem, we can write it in the form: 1 1 min 2 n b r
pr r or
r r
r r
r hr r
r D
TC C D C
Q
Q D
K L C L
Q
(3)Applying Duffin et al. [9] results of geometric pro-gramming technique to (3), the enlarged predual function could be written in the form:
1 2 3
4 5 2 1 3 5 4 1
1 1 2 3
4 5
1 1 2 3
4 5
1
2
2
r r r
r r
r
r r
r r
W W W
b n
r pr r or r hr
r r r r r
W W
hr r r r
r r r
W
W W
n
pr or hr
r r r r
W W hr r r b W r
D C D C Q C
G W
W Q W W
K C L D L
W Q W
C C C
W W W
K C W W D
1 2 5 2 3 5 4 5
1 2
r r r r r r
r r
W W W W W
r W W r Q L (4)
Since the dual variable vector j r,
is arbitrary and can
be chosen according to convenience subject to:
W
, 1, 2 , 3, 4 , 5, 1, 2 , 3, ,
j r n
0 1r 2r 3r 4r 5r 1 jr
W W W W W , W (5) We choose jr such that the exponents of r r
are zero, thus making the right hand side of (4) independent of the decision variables. To do this we re-quire:
W D , Q
and Lr
1 2 52 3 5
4 5 1 0 0 1 0 2
r r r
r r r
r r
b W W W
W W W
W W
(6)
These are called the orthogonality conditions which together with (5) are sufficient to determine the values of
, 1 2 , 3, 4 , 5, j r
W j , r1, 2 , 3,,n . Solving (5) and (6) for Wjr, we get:
1 5 2 5 3 5 4 5 1 1 2 2 1 2 1 1 12 1 2 1
1
1 2 and
2 1 2 r r r r r r r r W W b b b W W b b b W W b W W (7)
Substituting Wjr , j1, 2 , 3, 4 ,r1, 2 , 3, ,n
5r g Win (4), we get the dual function . To find W5r which maximize g W
5r , the logarithm of both side of
5r g W5r
W
, and the partial derivatives were taken relative to . Setting it to equal zero and simplifying, we get:
2 3
2
5 5 1 5 5
1 5
1 2 1 2
1 2 0
b b
r r r r
b r
f W W A b W W
Ab W
(8)
where:
1 2 1 3 1 1 2 , ,2 1 2 1 1 2
1 2 and 1 2 b b b b b b b b b
1 2 1 2 1 21 2
2 1 1
2 1 b hr or b b b b
or hr pr
K C A
C
b
C C C b
It is clear that f
0 0 and which means that there exists a root
1 0f
5r . The trial and error
method can be used to find this root. However, we shall 0 ,1
first verify the root 5 calculated from (8) to
maxi-mize . This is confirmed by the second deriva-tive to with respect to , which is always negative. * r W * r
,r * jr W j * r W
5r g W
lng W
1, 2 ,
W j
5r W
g W
3, 4 ,
5r
W
,n
2 , 3, 4
* * D Q
Thus, the root calculated from (8) maximize the dual function . Hence, the optimal solution is , where 5 is the
solution of (8) and are evaluated by substituting value of in (7).
5
5r5
, 1, 2 , 3,
*
jr
, 1,
* r W
*
5
To find the optimal values r r r , we apply
Duffin et al. [9] of geometric programming as indicated below:
, ,L
1 5 2 5 * r * * r W g 1 * b r * r * r * r rW g ,
D
C W W ,
Q p r o r C D
4 5 * * r r g W g W3 5 and
2 * r r * * * r r
C W ,
L W h r h r Q C K
By solving these relations, the optimal demand rate is given by:
1 1 2b
2 1 2 2 3 , 2 * or hr r * * pr r r
C C W
D .
C W W
*
r (9)
The optimal order quantity is:
2 1 2
1 1
2
2 2 3
, 2
b
* * b
* r Q or
pr
r or hr r
* * *
r pr r r
C W C C W
C W C W W
(10) The optimal lead time is:
2 2
2 1 2
1 4 1
2
2 3 2 3
2 * r L 2 b
* * * b
or hr
r r r
* * * *
pr r r pr r r
C W W C C W
W W C W W
or
K C (11)
By substituting the values of in (3), we deduce the minimum total cost as:
and
* * *
r r r
D , Q L
2 11
1 2 3
2
2 2 1
1 1 2
2 1 2
2
1 1
2
2 2 3
min 2 1 2 2 b * n
* or hr r
r pr * *
r pr r r
* * *
r r r
hr
* * *
r r r
b r r * * or hr r r * * *
r pr r r
C C W
L C
C W W
W K C
W W
C C
W W
W C W W
2 3 1 2 * * r r r o * * pr *or hr r
or hr pr
TC D ,Q ,
W W
W C
C W W
C C W
C C C 1 2 4 3 1 b * b r * r W W (12)
As a special case, we assume Lr 0 , 0 and
0b R L , 1 4 and
* *
r r
W W 5 0 ,
* r W 2 3 1 2 * * r r
W W . This is the classical EOQ inventory model.
4. An Illustrative Example
We shall compute the decision variables (optimal order quantity , optimal demand rate and optimal lead time ) whose values are to be determined to minimize the annual relevant total cost for three items (n
= 3). The parameters of the model are shown in Table 1.
* r Q * r L * r D
Assume that the standard deviation 6 unit/year and K = 2.
For some different values of and b, we use equa-tion (8) to determine 5 , whose value is to be
deter-mined to obtain
* r W
* jr
W , j = 1, 2, 3, 4, r = 1, 2, 3 from (6). It follows that the optimal values of the production batch quantity Q demand rate D*r ad time
* r L and minimum annual total cost are given in Tables 2-7.
*
[image:3.595.113.230.228.322.2]r, , le
Table 1. The parameters of the model.
r Cor Cpr Chr r
1 $ 200 $ 10 $ 0.8 $ 1
2 $ 140 $ 08 $ 0.5 $ 2
3 $ 100 $ 05 $ 0.3 $ 3
Table 2. The optimal solution of Qr* and
*
r
D as a func-tion of b ( for all ).
b Q1* Q2* Q*3 D1* D2* D3*
2 28.21 31.17 33.10 1.450 1.550 1.540
5 26.41 28.55 31.00 1.395 1.455 1.440
8 25.65 27.49 29.90 1.316 1.350 1.340
10 25.25 26.99 29.40 1.280 1.300 1.295
20 24.20 25.72 28.03 1.170 1.180 1.178
Table 3. The optimal solution of and as a function of b ( ).
*
r
L min TC
= 0.1
b L1* L*2 L*3 min TC
2 8.410–9 8.910–8 1.310–6 59.6932
5 4.210–17 2.410–14 4.910–11 66.0704
8 2.110–23 2.410–17 1.010–12 71.6195
10 1.210–26 8.110–20 2.710–13 83.8121
20 3.410– 39 6.910–26 1.510–14 422.838
Table 4. The optimal solution of and as a function of b (
*
r
L min TC
= 0.2
).
b L1* 2 *
L 3
*
L min TC
2 2.710–9 5.110–8 6.510–7 77.539200
5 2.510–17 2.210–14 2.310–11 243.99000
8 2.210–24 4.310–19 3.710–14 2906.5400
10 7.110–28 1.410–21 1.710–15 15175.300
[image:3.595.65.508.348.729.2]K. A. M. KOTB ET AL. 554
Table 5. The optimal solution of and as a function of b ( ).
*
r
L min TC
= 0.3
b L*1 L*2 L*3 min TC
2 2.610–9 2.510–8 5.510–7 112.62400
5 2.410–17 2.110–14 1.210–11 6729.1300
8 1.710–24 8.710–20 4.110–15 75148.000 10 6.410–29 5.410–23 2.310–17 1.495107
[image:4.595.59.285.215.280.2]20 1.210–46 2.810–35 1.910–25 2.8581012
Table 6. The optimal solution of and as a function of b (
*
r
L min TC
= 0.4
).
b L*1 2 *
L 3
*
L min TC
2 5.910–10 1.210–8 2.010–7 309.50100
5 3.910–17 1.610–14 5.410–12 99640.100
8 3.410–25 3.910–20 4.610–16 1.317108
[image:4.595.315.538.264.391.2]10 7.910–29 2.910–24 8.710–19 2.050109 20 6.810–51 5.010–41 1.510–32 5.6291018
Table 7. The optimal solution of and as a function of b (
*
r
L min TC
= 0.5
).
b L1* 2 *
L 3
*
L min TC
2 1.210–10 3.610–9 7.410–8 1013.00000
5 6.110–18 7.210–15 8.410–12 2.5485106
8 5.210–26 6.010–21 7.110–17 2.28801010
10 4.910–30 5.610–25 6.710–19 2.314291012 20 4.310–52 4.810–44 5.710–38 2.38881024
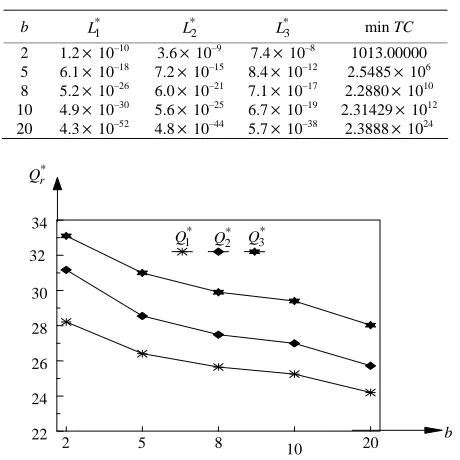
[image:4.595.59.289.317.547.2]Figure 1. The optimal order quantity against b (for all ).
Figure 2. The optimal demand rate against b (for all ).
Figure 3. The minimum total cost against b (for all ).
Figure 4. The minimum total cost against (for all b).
Solution of the problem may be determined more readily by plotting ( * * min
r r
Q , D , TC) against b and min
TC against , for each values of .
5. Conclusions
his paper is devoted to study multi-item inventory
tal cost is found at
T
model that consider the order quantity, the demand rate and the leading time as three decision variables. These decision variables * , * and * , 1, 2 , 3, ,
r r r
Q D L r n
are evaluated and the
is deduced. The classical system is derived as special case and a numerical example is solved.
The smallest value of the minimum to
minimum annual total cost min TC
the smallest values of b and .
6. References
] T. C. E. Cheng, “An Economic Order Quantity Model
Models Involv-[1
with Demand-Dependent Unit Cost,” European Journal of Operational Research, Vol. 40, No. 2, 1989, pp. 252-256. doi:10.1016/0377-2217(89)90334-2
[2] M. Ben-Daya and A. Raouf, “Inventory
ing Lead Time as a Decision Variable,” Journal of the Operational Research Society, Vol. 45, No. 5, 1994, pp. 10
2 5 8 10 20
1.1 1.2 1.3 1.4 1.5
1.6 *
1
D D*2 D*3
b
* r
D
5 8 10 20
2 1E + 3
0 1E + 6 1E + 9 1E + 12 1E +15 1E + 18 1E + 21 1E + 1E + 24 27 1E +
b
minTC
0 1. 0 2. 0 3. 0 4. 0 5.
n TC
mi
0.2
1 0.3 0.4 0.5
0. 1E + 0 1E + 3 1E + 6 1E + 9 1E + 12 1E + 15 1E + 18 1E + 21 1E + 24 1E + 27
b = 2b = 5b = 8b = 10b = 20
* r
Q
34
2 5 8 20
22 24 26 28 30 32
* 1
Q Q*2 Q3*
[image:4.595.69.279.571.717.2]Model with Varying Holding Cost under Two
mand and Cost
ulti-Item Inventory osts and
Geometric
QO Cost: A Geometric
Pro-n Wiley, New 579-582.
[3] M. O. Abou-El-Ata and K. A. M. Kotb, “Multi-Item EQO Inventory
Restrictions: A Geometric Programming Approach,” Pro-duction Planning & Control, Vol. 8, No. 6, 1997, pp. 608-611. doi:10.1080/095372897234948
[4] J. T. Teng and H. L. Yang, “Deterministic Inventory Lot-Size Models with Time-Varying De
under Generalized Holding Costs,” Information and Man-agement Sciences, Vol. 18, No. 2, 2007, pp. 113-125. [5] H. Jung and C. M. Klein, “Optimal Inventory Policies
under Decreasing Cost Functions via Geometric Pro-gramming,” European Journal of Operational Research, Vol. 132, No. 3, 2001, pp. 628-642.
doi:10.1016/S0377-2217(00)00168-5 [6] K. Das, T. K. Roy and M. Maiti, “M
with Quantity-Dependent Inventory C
Yor
Dependent Unit Cost under Imprecise Objective and Re-strictions: A Geometric Programming Approach,” Pro-duction Planning & Control, Vol. 11, No. 8, 2000, pp. 781-788. doi:10.1080/095372800750038382
[7] N. K. Mandal, T. K. Roy and M. Maiti, “Inventory Model of Deteriorated Items with a Constraints: A
Programming Approach,” European Journal of Opera-tional Research, Vol. 173, No. 1, 2006, pp. 199-210. doi:10.1016/j.ejor.2004.12.002
[8] K. A. M. Kotb and H. A. Fergany, “Multi-Item E Model with Varying Holding
gramming Approach,” International Mathematical Fo-rum, Vol. 6, No. 23, 2011, pp. 1135-1144.
[9] R. J. Duffin, E. L. Peterson and C. Zener, “Geometric Programming—Theory and Application,” Joh