Volume 3, Issue 3, 2016
65
Available online at www.ijiere.com
International Journal of Innovative and Emerging
Research in Engineering
e-ISSN: 2394 - 3343 e-ISSN: 2394 - 5494
Brain Controlled Robot Car
R.S.Shekhawat1a, Rajat Sharma2b and Ravi Rao2b
aAssistant Professor Department of Electrical Engineering, B. K. Birla Institute of Engineering & Technology, Pilani,
India
bStudent, Electrical, B. K. Birla Institute of Engineering & Technology, Pilani, India
ABSTRACT:
Robot Car is that device that can be remotely controlled using the user’s brain signals. This system uses BCI (Brain-Computer Interface) to provide communication between our brain and the robotic car. It uses an EEG (Electroencephalogram) headset to acquire data, classifies and interprets the data set on the hardware, and achieves desired commands on the robotic car based on the provided classification. The data is transferred through a Bluetooth module, while the commands are executed by Arduino. The purpose of the robot-car is to demonstrate the feasibility of applying in BCI application, as we will be shown in this paper to controlling the robotic car.
Keywords: Mind wave sensor, Beta Wave, Neurosky, Arduino, HC-05
I. INTRODUCTION
With the worlds progress every one want to be advanced, as the automation in the field of engineering is increasing, it can be best understood by the laser operations where automation works, it has increased the success rate. For brain mapping we use a technique electroencephalogram (EEG), which works on the electric pulses generated in the brain, by extracting these nerves we can track the state of the mind, for example attention, meditation. An electroencephalogram (EEG) gives us with different frequencies which can be further decoded as the states of mind, propensity to have writing and specific sort of epilepsy. For the people with disabilities, it can be used to control a car or it can be implemented for anything which needs to be handled for movement through wheels. Products are available with which control through voice recognition or some sort of sensors. With a step ahead of them we are using brain to control the proceedings.
II. METHODOLOGY
To control the robot car, EEG signals are required. This paper explains EEG signals through Neurosky interface. In this system we have:
Signal intensity: it provides the EEG strength, which is low and given in microvolts (µV). Signal frequency: The various types of frequencies in the brain EEG are:
Delta, Theta, Alpha, Beta and Gamma which has different frequency and these are produces in different parts of brain.
The Proposed Structure
Volume 3, Issue 3, 2016
66 EEG signal from the brain is used to generate a Brain-Computer Interface (BCI) for the important part controls robot car through Bluetooth HC-05. We use Neurosky headset provides us with signals like meditation and attention. Along with this, we extract the eye-blink signals from the headset. Now, we have attention and eye-blinking signals are received as the management signals by a Bluetooth (HC-05) interface and then after used to interface in electric robot car.
The EEG signal was extracted from EEG headset which is manufactured by Neurosky. In this system, we use the Neurosky’s mindwave mobile headset to sense an EEG signal and eye blinking signals. The recorded with the sensor to read brain waves placed on the front side arm just above the eye, as shown by the Figure ., the brainwaves are transmitted by the internal Bluetooth wireless module. The output of Neurosky’s mindwave mobile headset is received by Bluetooth module HC – 05 interface organized by using of Arduino UNO and it is also connected to a personal computer with a software of Arduino IDE.
We can see the experimental system an Arduino is the hardware connecting all the links which are receiving Bluetooth, the robot car to be controlled and the computer from where the commands (programs) can be transferred to the Arduino board and at the same time that software shows us all the things happening on the serial communication port. The program in the Arduino analyzes the data received by Bluetooth and accordingly generates outputs on the terminals which are already stored in the program.
Figure .2 The Neurosky mindwave mobile headset
Table .1 Responses of the Robot Car
The car is run by 2 motor drives. The 8 V power produced from the source helps the acceleration and the rotation to turn to a direction.
III.IMPLEMENTATION
Here we are work on EEG wave and the Neurosky headset is having only one sensor so it’s a difficult task to take out exactly different waves for the control of the car because at the same time. First of all we need to get the raw EEG data from the brain to the software which would then make the data in such a way that can be used according to our feasibility. The data is then to be sent over to the hardware that would be solely responsible for the movements made by the car. At starting we had connected led’s to the output ports of the Arduino, a program was run to show the attention value on the output ports in the difference of 10. This way we get to check that we are receiving raw data at real time. Now for further work we are considering the MATLAB and LABVIEW software’s to play an important role for the analysis of EEG data with their simulation parts although our main focus is on less complex and cheap arrangement of the system. This is only possible when we are eliminating the use of computer based processing because will lead to complexity and a delay in output is another demerit. For the output we need to develop a robot car, this includes four 12v dc gear motors which are driven by motor driver IC as they require handsome amount of current, which the Arduino is unable to provide. So external source is needed to supply the needed current. For making the robot car totally wireless we need to put that external source on the chassis of the car and the Arduino is to be supplied from the same supply source. There is a two type voltage supply (5V and 8V) used for Arduino and motor Drive, Arduino is drive by 5V and motor is driven by 8V. There is a requirement of motor drive IC L293D which has a dual H type bridge and it works as a current amplifier. L293D takes low current as input and gives high current for motor. It is also use for forward and reverse
Output response Brain signals
Take a move Eye-blink
Volume 3, Issue 3, 2016
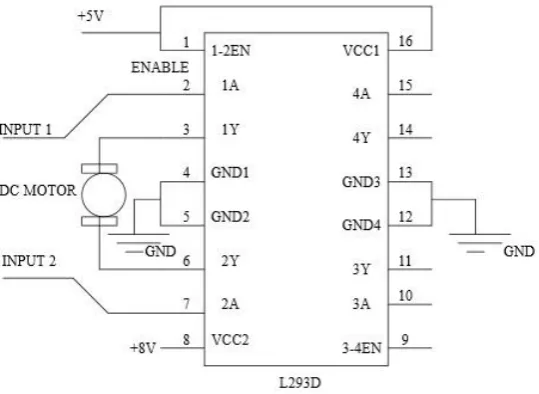
67 acceleration of motors. We can drive two motors in forward and reverse direction from single IC. According to shown in fig-5 In IC L293D we have 2,7,10 and15 for input and 3,6,11 and 14 are used to drive motors. For starting motor pins 1 and pin 9 is high these are ENABLE pins. Pin 4,5,12 and 13 are ground pins. +8V supply is given at pin 7 and 5V is connected at enable pin 1 and 16.
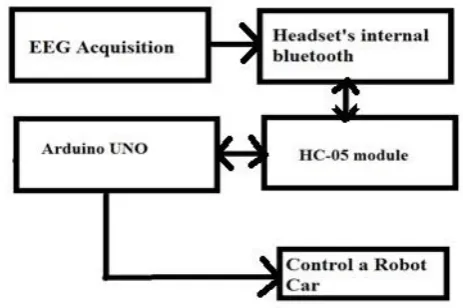
Figure .3 Schematic diagram of project Simple example scenario is as follows:
Figure .4 Block diagram of project
Using Beta wave (human brain attention) of Neurosky Mind wave Mobile Headset device forwards brainwave signals to the hardware. It can be used to understand and we compare the data at regular interval and brain patterns can be recognized, which is done at real time data sharing of brainwaves and map them into the appropriate actions.
Figure .5 IC Connection diagram
Volume 3, Issue 3, 2016
68 Arduino Code
////////////////////////////////////////////////////////////////////////
#define LED 13
#define BAUDRATE 57600 #define DEBUGOUTPUT 0
#define PORT6 6 #define PORT7 7 #define PORT8 8 #define PORT9 9
#define powercontrol 10 void blink()
{
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, HIGH); digitalWrite(PORT8, LOW); digitalWrite(PORT9, LOW); delay(1500);
}
// checksum variables byte generatedChecksum = 0; byte checksum = 0;
int payloadLength = 0; byte payloadData[64] = {0}; byte EYEBLINK = 0; byte attention = 0; byte meditation = 0;
// system variables
long lastReceivedPacket = 0; boolean bigPacket = false;
////////////////////////// // Microprocessor Setup // ////////////////////////// void setup()
{
pinMode(PORT6, OUTPUT); pinMode(PORT7, OUTPUT); pinMode(PORT8, OUTPUT); pinMode(PORT9, OUTPUT); pinMode(LED, OUTPUT);
Serial.begin(BAUDRATE); // USB }
////////////////////////////////
// Read data from Serial UART // ////////////////////////////////
byte ReadOneByte()
{
Volume 3, Issue 3, 2016
69
while(!Serial.available()); ByteRead = Serial.read();
#if DEBUGOUTPUT
Serial.print((char)ByteRead); // echo the same byte out the USB serial (for debug purposes) #endif
return ByteRead; }
///////////// //MAIN LOOP// ///////////// void loop()
{
// Look for sync bytes if(ReadOneByte() == 170) {
if(ReadOneByte() == 170) {
payloadLength = ReadOneByte();
if(payloadLength > 169) //Payload length cannot be greater than 169 return;
generatedChecksum = 0;
for(int i = 0; i < payloadLength; i++) {
payloadData[i] = ReadOneByte(); //Read payload into memory generatedChecksum += payloadData[i];
}
checksum = ReadOneByte(); //Read checksum byte from stream
generatedChecksum = 255 - generatedChecksum; //Take one's compliment of generated checksum
if(checksum == generatedChecksum) {
EYEBLINK = 200; attention = 0; meditation = 0;
for(int i = 0; i < payloadLength; i++)
{ // Parse the payload switch (payloadData[i])
{ case 2: i++;
EYEBLINK = payloadData[i]; bigPacket = true; break;
case 4: i++;
attention = payloadData[i]; break;
case 5: i++;
meditation = payloadData[i]; break;
Volume 3, Issue 3, 2016
70
i = i + 25; break; default: break; } // switch } // for loop
#if !DEBUGOUTPUT if(bigPacket) {
if(EYEBLINK >= 10) {
digitalWrite(LED, LOW); void blink();
}
else
digitalWrite(LED, HIGH); }
Serial.print("EYEBLINK: "); Serial.print(EYEBLINK, DEC); Serial.print(" Attention: "); Serial.print(attention, DEC);
Serial.print(" Time since last packet: ");
Serial.print(millis() - lastReceivedPacket, DEC); lastReceivedPacket = millis();
Serial.print("\n");
switch(attention / 10) {
case 0:
digitalWrite(PORT6, LOW); digitalWrite(PORT7, LOW); digitalWrite(PORT8, LOW); digitalWrite(PORT9, LOW); break;
case 1:
digitalWrite(PORT6, LOW); digitalWrite(PORT7, LOW); digitalWrite(PORT8, LOW); digitalWrite(PORT9, LOW); break;
case 2:
digitalWrite(PORT6, LOW); digitalWrite(PORT7, LOW); digitalWrite(PORT8, LOW); digitalWrite(PORT9, LOW); break;
case 3:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 4:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
Volume 3, Issue 3, 2016
71
case 5:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 6:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 7:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 8:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 9:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; case 10:
digitalWrite(PORT6, HIGH); digitalWrite(PORT7, LOW); digitalWrite(PORT8, HIGH); digitalWrite(PORT9, LOW); delay(1500);
break; }
} #endif
bigPacket = false; }
else {
// Checksum Error
} // end if else for checksum } // end if read 0xAA byte } // end if read 0xAA byte
IV.CONCLUSION
Volume 3, Issue 3, 2016
72 controlled more precisely using a commercial headset as it has more sensors and even by switching over to LABVIEW as a computer processing of the signals.
ACKNOWLEDGEMENT
I am thankful to Dr. P. S. Bhatnagar (Director BKBIET, PILANI) his true help & providing the resources on completion of project, Dr. (Prof.) L. Solanki principal (Academic, BKBIET PILANI) for his valuable suggestions & encouragement last but not least, I pay my sincere thanks and gratitude to my parents without whose continuous motivation this paper cannot be completed.
REFERENCES
[1] Kim Dremstrup Nielsen, Alvaro Fuentes Cabrera, O.F. do Nascimento, "EEG based Brain Computer Interface - towards a better control Brain computer interface research at Aalborg university,” IEEE Transactions on Neural Systems and Rehabilitation Engineering., vol. 14, no. 2, Article ID 1642769, pp. 202–204, 2006.
[2] Kamlesh H. Solanki, Hemangi Pujara, “BRAINWAVE CONTROLLED ROBOT”, IRJET e-ISSN: 2395 -0056 p-ISSN: 2395-0072, Vol. 02, pp. 609–612, July-2015.
[3] S. Y. Cho, A. P. Winod, K. W. E. Cheng and, "Towards a Brain Computer Interface Based Control for Next Generation Electric Wheelchairs ", 2009 3rd International Conference on Power Electronics Systems and Applications pp. 1-5.
[4] Jzau-Sheng Lin, Kuo-Chi Chen, and Win-Ching Yang, “EEG and Eye-Blinking signals through a BCI Based Control for Electric Wheelchairs with Wireless Scheme”, Conference paper, pp. 731-734, June-2010.
[5] J.R. Wolpaw, N. Birbaumer, D.J. McFarland, G. Pfurtscheller, and T.M. Vaughan, “BCI for communication and control,” Clin. Neurophysiology, vol. 113, no. 6, pp. 767– 791, 2002.
[6] J. R. Wolpaw, N. Birbaumer, W. J. Heetderks, D. J. McFarland, P. H. Peckham,G. Schalk, E. Donchin, L.A. Quatrano, C.J. Robinson, and T. M. Vaughan, “brain computer interface technology: A review of the first international meeting,” IEEE Trans. Rehab. Eng., vol. 8, No. 2 pp. 164–173, June 2000.
[7] S.G. Mason and G.E. Birch, “A general frame work for brain-computer interface design,” IEEE Trans. Neural Syst. Rehab. Eng., vol. 11, pp. 70–85, Mar. 2003.
[8] Sabbir Ibn Arman, Arif Ahmed, and Anas Sayeed, “Cost-Effective EEG Signal Acquisition and Recording System”, International Journal of Bioscience, Biochemistry and Bioinformatics, Vol. 2, No. 5, September 2012
[9] G.Rajendra Kumar, Dr.Samuel Vara Prasada Raju and D. Santhosh Kumar, “Classification of EEG signals for drowsiness Detection in brain and computer interface,” GESJ: Computer Science and Telecommunications, vol. 4(36) (2012).
[10]Ms. Pranjali Deshmukh, Mr. S. B. Somani, Ms. Shivangi 2505 International Journal of Engineering Research & Technology (IJERT) Vol. 2 Issue 10, October – 2013 IJERT IJERT ISSN: 2278-0181 www.ijert.org IJERTV2IS100680 Mishra and Mr. Daman Soni, “EEG based drowsiness estimation using mahalanobis distance,” ISSN vol.1 pp. 2500-2501,Aug.2012.
[11]Alice Caplier, Sylvie Charbonnier and Antoine Picot, “On-Line Detection of Drowsiness using Brain and Visual Information,” IEEE Trans. Syst., Man, Cybern. A, Syst., Humans, vol. 42, no. 3, pp. 773-774, May 2012.
[12]Arun Sahayadhas, Kenneth Sundaraj and Murugappan Murugappan, “Detecting driver drowsiness based on sensors: A Review,” ISSN vol. 12, pp. 16937-16953, Dec. 2012.
[13]G. E. Fabiani, D. J. McFarland, J. R. Wolpaw, and G. Pfurtscheller, "Conversion of EEG activity into cursor movement by a brain-computer interface (BCI), IEEE Trans. on Neural Systems and Rehabilitation Eng., vol. 12, no. 3, pp. 331-338, Sep. 2004.
[14]Luzheng Bi, Xin-An Fan, Yili Liu “EEG-Based Brain-controlled Mobile Robots: A survey”, IEEE Transactions on Human-Machine Systems, (Volume:43, Issue:2), pp. 161-173, Mar 2013.