A MOBILE AGENT-BASED EVENT
DRIVEN ROUTE DISCOVERY
PROTOCOL IN WIRELESS SENSOR
NETWORK: AERDP
PREETI SETHI
*,
Department of Computer Science ,YMCA University of Science & Technology, Faridabad-121002,Haryana, India
DR. DIMPLE JUNEJA
Department of Computer Science ,Maharishi Markandeshwar University, Mullana-133207,Haryana,India
DR. NARESH CHAUHAN
Department of Computer Science ,YMCA University of Science & Technology, Faridabad-121002,Haryana, India
Abstract:
Although the idea of injecting mobile agents in Wireless Sensor Network (WSN) in deterministic as well as non-deterministic environments is not new but the strategy of processing the information and the path, a mobile agent should follow is still in its infancy. The work proposes a mobile agent based top-down approach for harvesting the data from WSN deployed in non-deterministic environment, in particular. Further, embedded mobile agents can be harnessed for the data capture process as these mobile agents can travel the network and adapt to the changing environment. The work uniquely contributes a mobile-agent based event-driven approach for collecting the data from various hops in different clusters and a mobile agent is responsible for forwarding the processed information to the sink. Further, it is emphasized that embedding mobile agents into sensors would result into a dynamic method for sensing and processing the data in non-deterministic environments.
Keywords: Wireless Sensor Networks, Mobile Agents, Event-Driven, Optimal Itinerary
1. Introduction
improves the fusion accuracy, it also increases the communication and computation overheads [Xu Yingyue and Qi Hairong, (2006)].
In a typical client/server based WSN, the occurrence of certain events will alert sensors to collect data and send them to a sink node. However, the use of MAs leads to a new computing paradigm, which is in marked contrast to the traditional client/server-based computing [Chen Min, et al.(2006)]. The MA is a special kind of software that propagates over the network either periodically or on demand (when required by the applications). It performs data processing autonomously while migrating from node to node. The sensed data is reduced and aggregated by the agent and then sent back to the sink as instructed by the mobile agent, yielding a single traffic flow instead of multiple ones [Chen Min, et al. (2007)]. Moreover, the concept of injection of mobile agents introduces fluidity of code and state in the network, thereby making WSN capable of running several autonomous applications at a time [Fok Chien-Liang et al.]. Considering the above stated demands for an efficient route of migration of mobile agent and the significant characteristics of agents, this work aims to propose a mobile agent-based event driven route discovery protocol (AERDP) in WSN which would ultimately be able to provide energy efficient migration and data fusion accuracy.
The paper is structured is as follows: Section 1 highlighted the limitations of WSN and the contribution of mobile agents towards autonomy. Section 2 presents the works of eminent researchers in the related field highlighting the technological challenges and the need for a new technical solution. Section 3 describes the unique contribution of this work and section 4 finally concludes throwing some light on future work.
2. Related Work
Latest research trends indicates that mobile agents have been playing a vital role in WSN and the task of imbibing mobile agents in WSNs has been enormously attracting researchers and people from industry in recent years. The research works mainly injects agents carrying out the tasks of data fusion locally and submit the collected information to the base station. Various algorithms for routing in WSNs have been suggested and implemented.
Chen et. al [Chen Min, et al.(2006)] emphasized that efficient data dissemination can be achieved using a mobile agent based paradigm as against the traditional client server paradigm. Kwon et. al [Kwon Taekyoung et a.l (2005)] have proposed a mobile agent architecture in multi-hop environments to deal with multiple tasks simultaneously. Authors [Biswas Pratik K., et al. (2008)] have considered a collaborative target classification application to illustrate the efficacy of the mobile-agent-based computing model. Chen and his co-authors [Chen Min, et al. (2007)] have highlighted various design issues for using mobile agents in wireless senor networks. Qi & Wang [Qi Hairong and Wang Feiyi] proposed an optimal itinerary design for a mobile agent. Work in [Fok Chien-Liang et al] presented a mobile agent middleware (called Agilla) that facilitates the rapid deployment of adaptive applications in WSNs. Agilla injects mobile agents in a sensor network which can then intelligently move or clone themselves to desired locations in response to changing environment. Authors [Lin Kai, et al. (2011)] have leveraged mobile agent technology to investigate the problem of how to balance the energy consumption during data collection in WSNs where as works presented in [Vupputuri Saamaja ;Rachuri Kiran K. ; Siva Ram Murthy C. ,(2010)] have focused on maximizing network lifetime of a Wireless Sensor Network (WSN) using mobile Data Collectors (DCs) without compromising on the reliability requirements. Researchers [Mpitziopoulos Aristides, et al(2009)] have described that agents can play the critical role in the field of security and robustness of a WSN in addition to data fusion. Works by Aiello et. al [Aeillo F. et al, (2011)] have considered agents for signal processing in WSN. Work presented in [Wu Jian et al ,(2010)] has shown the efficiency of the multi-agent technology for WSN based structural health monitoring (SHM) applications on the large aircraft structures.
effective in supporting the dynamic characteristics of wireless sensor networks (WSNs) and cannot ensure sufficient quality of service in WSN applications [Liu Min et al. (2011)]. Therefore, the need of technical solution is apparent and the related work cited above ensures that one of the implicit underlying paradigm is that of multi-agent systems (MAS) and MAS is a promising candidate solution.
MAS constitute systems of autonomous, social and deliberative software entities that may be nomadic in nature, migrating from location to location around a wireless or wired network [Wooldridge, M., and Jennings, N., 1995,]. The autonomous and deliberative nature of such reasoners is central to the notion of self-maintenance. These agents build a self-organized overlay network where neither centralized nor decentralized control is needed [Bojic Iva ,et al (2010).].Agents perceive the environment within which they are situated, and based upon environmental dynamics they employ their available actuators to execute plans they have developed.
A critical look at the above literature indicates that though extensive work has been done in the field of routing in WSN and mobile agents have also been introduced but none of the researchers have focused their works towards event-driven route discovery in wireless sensors deployed in non-deterministic environment. Next section presents an algorithm with an aim to provide a solution for few of the above stated challenges.
3. AERDP : The Proposed Protocol
This section presents an agent-based event driven route discovery protocol (AERDP). The work is motivated by the fact that various sensor nodes in the same vicinity often come across spatial contention i.e. will sense the same event and would transmit the same information. Taking into consideration the battery constraints of sensors, it is desirable that only the necessary subset of all nodes (observing the same event) shall transmit the data and rest should remain in an active mode. Further, with time the density of sensor nodes in a particular geographical domain varies. Therefore, the four major reasons that motivate this work are event-driven nature of sensor network, spatially correlated contention, need of event-reporting by a subset of nodes and variation in the density of sensor nodes.
The work proposed in this paper is not the first idea demanding for a new protocol but many eminent researchers [Heinzelman, W (2000), Ye, W., Heidemann, J., And Estrin, D, (June 2002)] have demanded for the protocol that conserves energy and increases the lifetime of the network.
3.1 High Level View of AERDP
AERDP is an event-driven protocol which presents a hierarchical solution in a clustered sensor network. The high-level view of the proposed work is depicted in figure 1. As proposed in [Fok Chien-Liang et al.], the fundamental backbone remains same i.e. agents are basically embedded on to each sensor node. These agents can adopt the role of a master agent and the child agent. The sensor network in an environment is divided into various clusters and each cluster can elect a monitor (head) to which all other nodes within the same cluster report about the events happening in the vicinity. Each node is now assisted with two mobile agents which are basically replicas of each other having potential to run concurrently and independently. Further, the agent assisting the monitor is termed as Master Agent and rest of the agents in a cluster are termed as Child Agent. Basically, rather than each child agent directly reporting to the sink, it reports to its monitor’s agent about the event. The master agent is now responsible for the discovery of route for gathering the information from other monitors.
In contrast, if the neighboring master agent has nothing to report, it remains in silent/sleep mode and the ancestor assumes that there is no further information that is to be collected.
In contrast to Agila [Fok Chien-Liang] , which addresses the agents by their geographic location, the AERDP addresses agents by their ids as nodes deployed in a non-deterministic environment are prone to drift away from their locations and further a mobile agent would move from one location to another, it would then be difficult to identify the parent node of migrating agent. In order to facilitate inter-agent coordination, AERDP supports both global and local name space. The local name space maintains the list of all agents, the agent id and their responsibilities within the same cluster whereas the global name space maintains the list of all immediate monitors and the assisting mobile agents and their replicas. Now, since only master agent can interact with master agents of different clusters, therefore global name space is usually referred by other master agents while local name space is meant for child agents. Both the name spaces are remotely accessible. This procedure of detecting the event is being gradually carried out in the clusters pertaining to the area where the event has occurred. Each master agent in its own cluster operates in three different modes, i.e. observation mode, negotiation mode and execution mode. The mentioned operating modes are discussed in the following subsection.
3.2 Agent Operating Phases
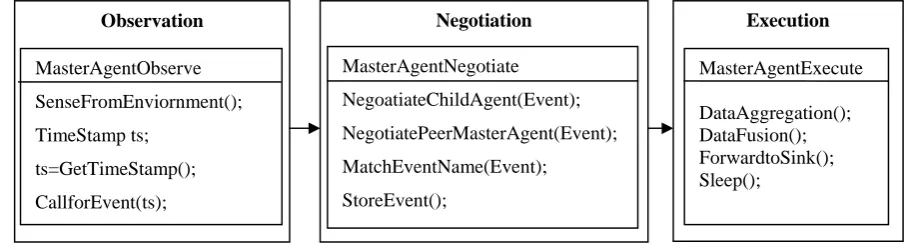
Primarily, each master agent operates in three different phases/modes, i.e. observation phase, negotiation phase and execution phase. In observation mode, it senses the event from the environment, refers to its global and local name space to gather the information about the location and ids of it one-hop neighbors & communicates its own requirements to its immediate neighbors. The output of this mode of the agent is being fed to peer agents. For the observed event, the master agent negotiates the requirements with the child agents and its peer agents. The later phase is termed as negotiation mode. In this mode, master agent gathers the information from all its peers and is responsible for data aggregation and data fusion. Addressing the issues of how data aggregation and data fusion is to be done is out of scope of this work and authors aims to address the same in future works. In the third phase i.e. execution mode , all agents on receiving the request from the ancestor agent execute the request in the pre determined interval of time otherwise no information available is presumed. Since their aim is to generate a response to the query by the ancestor, these are said to be functioning in the execution mode. Figure 2 depicts the operating modes of agents of participating agents in AERDP and their functionality in detail.
Negotiation
MasterAgentNegotiate NegoatiateChildAgent(Event); NegotiatePeerMasterAgent(Event); MatchEventName(Event);
StoreEvent(); Observation
MasterAgentObserve SenseFromEnviornment();
TimeStamp ts; ts=GetTimeStamp(); CallforEvent(ts);
Execution
MasterAgentExecute
DataAggregation(); DataFusion(); ForwardtoSink(); Sleep();
Next section presents the working algorithm and the flowchart of AERDP.
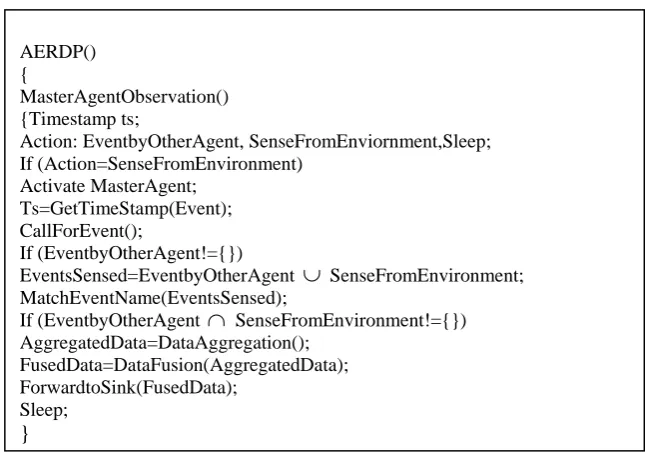
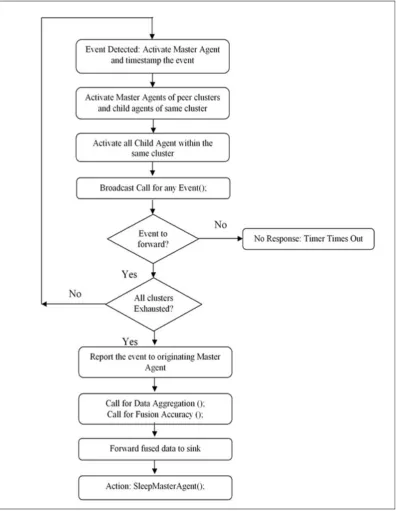
3.3 Algorithm and Flowchart
Figure 3(a) and 3(b) depicts the Algorithm and flowcart of AERDP respectively.
AERDP() {
MasterAgentObservation() {Timestamp ts;
Action: EventbyOtherAgent, SenseFromEnviornment,Sleep; If (Action=SenseFromEnvironment)
Activate MasterAgent; Ts=GetTimeStamp(Event); CallForEvent();
If (EventbyOtherAgent!={})
EventsSensed=EventbyOtherAgent
SenseFromEnvironment; MatchEventName(EventsSensed);If (EventbyOtherAgent
SenseFromEnvironment!={}) AggregatedData=DataAggregation();FusedData=DataFusion(AggregatedData); ForwardtoSink(FusedData);
Sleep;
4. Conclusions and Future Scope
The work proposed a new event-driven routing protocol which is supported by mobile agents. The protocol fully exploits the clustering approach and the potential of agents. Since each could support two replicas at the same time, it added to concurrency and addressed the issues of autonomy as well. Since the overhead of communicating the information is being taken over by agents, it could greatly enhance the energy-efficacy and lifetime of network. However, still there are challenges that must be addressed. First, WSNs have severely limited resources and TinyOS does not provide dynamic memory management, meaning all data memory must be statically allocated. Although names spaces have been taken care of but implementation of dynamic memory manager is still pending. At few instances, it could be observed that similar event was observed, fused and then filtered leading to wastage of bandwidth. Further, mobile agents are particularly susceptible to message losses, therefore an extra caution is required. The future work intends to propose information processing strategy for AERDP.
References
[1] Aeillo F. et al, (2011)“An agent –based signal node processing in –node environment for real time human activity monitoring based on wireless body sensor networks “Journal of engineering Applications of Artificial Intelligence ,24 , pp 1147-1161 [2] Biswas Pratik K.; Qi Hairong ; Xu Yingyue (2008) “ Mobile –agent-based collaborative sensor fusion” Journal of Information
Fusion , 9 , pp 399-411
[3] Bojic Iva ,et al (2010). ” A Self Optimising Mobile Network : Auto-tuning the network with firefly-synchronise Agents ” Journal of Information Sciences
[4] Chen Min, et al.(2006), “Mobiile Agent Based Wireless Sensor Networks”, Journal of computers , 1(1)
[5] Chen Min, et al. (2007) “ Applications and Design Issues for Mobile Agents in Wireless sensor Networks” Proceedings of IEEE Conference on Wireless communications
[6] Cicirelli Franco; Furfaro Angelo ; Nigro Libero (2007) “ Exploiting agents for modelling and simulation of coverage control protocols in large sensor networks” Journal of Systems & Software ,80 , pp 1817-1832
[7] Fok Chien –Liang ; Roman Gruia-Catalin ; Lu Chenyang (2005) “Mobile Agent Middleware for Sensor Networks ; An application Case Study ” , Proceedings of IEEE CONFERENCE
[8] Fok Chien-Liang ; Roman Gruia-Catalin ;Lu Chenyang , “ Mobile agent Middleware for Sensor Networks : an Application Case study “,
[9] Heinzelman, W.; Chandrakasan, A.; Balakrishnan (2000) “Energy-Efficient Communication Protocol for Wireless Microsensor Networks “ , In Proceedings of the 33rd Hawaii International Conference on System Sciences (HICSS)
[10] Kwon Taekyoung ; Chen Min;& Choi Yangee, (2005) “Data Dissemination based on mobile agents in Wireless Sensor Networks” proceedings of IEEE CONFERENCE
[11] Lin Kai, et al. (2011) “ Balancing energy consumptions with mobile agents in wireless sensor networks” Journal of future Generation Computer Systems
[12] Liu Min; Xu Shijun ; Sun Siyi (2011), ” an Agent- assisted QoS based routing algorithm for wireless Sensor Networks “Journal of Network & Computer Applications
[13] Marta Mirela ; Cardei Mihaela (2009) “ Improved Sensor Lifetime with multiple mobile sinks” Journal of Pervasive & Mobile Computing , 5 , pp 542-555
[14] Mpitziopoulos Aristides, et al(2009). “ JAID : Analgorithm for data fusion and jamming avoidance on distributed sensor networks” Journal of Pervasive & Mobile Computing ,5 , pp 135-147
[15] Qi Hairong; Wang Feiyi “ An Optimal Itinerary Analysis for Mobile Agents in Wireless sensor Networks “ [16] Rajagopalan Ramesh,et al . “Multi Objective Mobile Agent Routing in Wireless Sensor Networks”
[17] Vupputuri Saamaja ;Rachuri Kiran K. ; Siva Ram Murthy C. (2010) ” Using Mobile Data collectors to improve network lifetime in wireless sensor networks using reliability constraints” Journal of Parallel & distributed Computing , 70 , pp 767-778 [18] Wooldridge, M., Jennings, N., 1995, “ Intelligent Agents: Theory and Practice” Knowledge Engineering Review, vol. 10(2).
Cambridge University Press. New York, NY, USA, pp. 115–152
[19] Wu Jian et al ,(2010) “MultiAgent system Design and evaluation for collaborative wireless sensor network in large structure health monitoring “Journal of Expert Systems with Applications ,37 , pp 2028-2036
[20] Xu Yingyue ; Qi Hairong (2006 ) “ Mobile agent migration modeling & design for target tracking in wireless sensor networks” Journal of Adhoc Networks , 6 , pp 1-16