Stability Analysis of a Second-Order
Proportionally-Fair Rate Allocation Algorithm
P. Goudarzi
, F. Sheikholeslam
1and H. Saidi
1In this paper, a delay-dierence second-order proportionally-fair rate allocation algorithm has been proposed. As conventional proportionally-fair rate allocation algorithms deploy some form of scaled gradient ascent iterative algorithm for converging to user optimal rates, using fast second-order algorithms, such as Jacobi or approximate Newton methods, can be considered as natural and good candidates for increasing the convergence speed of the rate allocation algorithms. Stability analysis, related to scaled gradient ascent algorithms, in the presence of propagation delays, has been performed by some researchers, such as R. Johari et al., in Cambridge. In the current paper, the stability conditions of a second-order Jacobi method in the presence of propagation delays, with the simplifying premise of equality between all the users' propagation delays, is derived mathematically. Simulation results show that even in the general case of dierent propagation delays, stability is maintained.
INTRODUCTION
Real store-and-forward networks are composed of a number of users sending their data packets through some links. Actually, network links have some non-negligible propagation delays, which can become im-portant as the scale of the network grows. Propagation delay is the physical delay, which is generated due to the nite speed of electromagnetic or electrical waves propagated through some medias such as ber optic or microwave links. Usually, such propagation delays in the large scale networks become more important than queuing delays, which are due to packet waiting time in network switches or routers. Designing rate allocation strategies that remain stable and robust under propagation delays is a challenging problem. Chong et al. in 1,2] analyzed the equilibrium and stability of their rst order rate-based ow control algorithm in ATM networks for a single bottleneck link, through which a number of users with dier-ent propagation delays send their trac. Johari et al. in 3] have analyzed the stability property of Kelly's rst-order delay-dierence proportionally-fair *. Corresponding Author, Department of Electrical and Computer Engineering, Isfahan University of Technol-ogy, Isfahan, I.R. Iran.
1. Department of Electrical and Computer Engineering, Isfahan University of Technology, Isfahan, I.R. Iran.
rate allocation algorithm 4], under some simplify-ing premises. Massoulie et al. have analyzed the stability property of Kelly's rate allocation algorithm under the general case of arbitrary propagation delays for connections 5]. In 6] Altman et al. have designed a stable congestion controller for a single bottleneck link under their so-called action delays and with the notion of certainly-equivalent controllers. In the work of Johari and Massoulie, the packet-level queuing behavior at the resources is not important and, instead, a deterministic uid- ow approximation is considered. In their approach, a quasi static viewpoint of network congestion control is adopted 7] and all of the users' rates are average, which are averaged through, for example, ten or one hundred round trip times.
In this paper, the same approach as Johari et al. and Massoulie et al. is followed and it is assumed that the network trac can adapt itself to the network conditions. In another words, the term `elastic' has been used for the trac, as introduced by S. Shenker in 8] and used in Kelly's paper 4]. Examples of such trac types are TCP trac in the current Internet and ABR trac in the ATM networks.
In the current paper, to improve the convergence rate of Kelly's conventional proportionally-fair rate al-location algorithm, the Jacobi method is incorporated in Kelly's algorithm. In the presence of propagation de-lays, the local stability of the rate allocation algorithm
has been analyzed. The proposed algorithm has been compared with Kelly's algorithm using simulation.
The paper is organized as follows. In the following section some related works, specially the work of F. Kelly et al. 4] and R. Johari et al. 3] are reviewed in detail. Then, the stability analysis of the proposed second-order algorithm is described. After that, the simulation results are presented followed by the sum-mary and conclusion.
RELATED WORKS
Problem Formulation
Consider a network with a set, J, of resources or links and a set, R, of users and let C
j denote the nite capacity of link j 2 J. Each user, r, has a xed route, R
r, which is a nonempty subset of J. Also, dene a zero-one matrix, A, where A
rj = 1 if link `j' is in the user, r's, route, R
r, and A
rj = 0 otherwise. When the allocated rate to the user, r, is x
r, user,
r, receives utility,U r(
x
r). The utility, U
r( x
r), is an increasing, strictly concave and continuously dierentiable function of x
r over the range x
r 0. Furthermore, assume that the utilities are additive, so that the aggregate utility of rate allocation= (x
r r2 R) is:
r2R U
r( x
r). This is a reasonable assumption, since these utilities are those of independent network users. Assume that user utilities are logarithmic, then Kelly's formulation of the proportionally-fair rate allocation would be:
x r
n+ 1]= (
x r
n]+k r
! r
;x r
n] X j2Rr
j n]
)+
(1) where:
j
n] =p j
0 @
X s:j2R s
x s
n] 1 A
fxg+,max(0x): (2) Parameter `k
r' controls the speed of convergence in Equation 1. p
j(
y) is the amount that link `j' penalizes its aggregate trac,y, and is a non-negative, continu-ous increasing function of its argument. If one denes:
r
n], X j2R
r
j n] then, given
r, user,
r, selects an amount that it is willing to pay per unit time, !
r, and receives a rate x
r= !
r =
r.
One of the interpretations is that using Equa-tion 1, the system tries to equalize !
r with x
r n]. P
j2Rr
j
n] by adjusting the x r
n] value. Systems in Equations 1 and 2 show that the unique equilibrium,
x
r, is the solution of the following equation: !
r= x
r
X j2R
r p
j 0 @
X s:j2R s
x s
1 A
r2R : (3)
Propagation Delays
As R. Johari et al. have shown in 3], in the presence of propagation delays and neglecting queuing delays, Equation 1 changes to the following delay-dierence 9] equation:
x r
n+ 1] =x r
n] +k r
! r
;x r
n;D r]
X j2Rr
j
n;d2(jr)]
r2R (4) where:
j
n] =p j
X s:j2R s
x s
n;d1(js)]
j 2J
d1(js) is the forward delay from the user,s, to link,j, andd2(jr) is the reverse delay from link,j, to user,r. LetD
r be the propagation delay of user,
r, then, one can write:
d1(jr) +d2(jr) =D r
8j2r: If one assumes thatD
r=
D8r2Rfor all users, Johari has shown that a sucient condition for the local stability of the rate allocation algorithm (Equation 4), for eachr, would be 3]:
k r
X j2R
r p
j 0 @
X s:j2R s
x s
1 A+
X j2R
r
0 @
X s:j2R s
x s
1 A
p 0 j
X s:j2Rs
x s
!! <2sin
2(2D+ 1)
(5) where !
r k
r p
j(
:) and p 0 j(
:) are non-negative and the sign (0) in
p 0 j(
:) represents the derivative with respect to thex
r.
In the following section, a similar condition has been proposed for the second-order Jacobi iteration.
SECOND-ORDER ALGORITHM AND
STABILITY
In 10,11], the Jacobi method has been applied to Kelly's rate allocation algorithm 4] (which is based on the gradient ascent method) and the stability of the resulting second-order method is analyzed, in hierarchi-cal form. However, in the current paper the stability of the second-order algorithm has been analyzed in the presence of propagation delays.
The rate allocation algorithm, in the case of using the Jacobi method 12] and in the presence of propagation delays, would be:
x r
n+ 1] =x r
n] +k r ! r ;x r n;D
r] P j2R r j
n;d2(jr)] P
j2Rr
j
n;d2(jr)]+x r n;D r] P j2Rr 0 j
n;d2(jr)]
r2R (6)
where:
j n] =p
j
X s:j2Rs
x s
n;d1(js)]
0 j
n] =p 0 j
X s:j2R s
x s
n;d1(js)]
j2J: By linearization around the equilibrium point (x
r n] = x r+ k 1 2 r x 1 2 r y r
n]r2R) 4], one can write8r2R: yrn+1]=yrn];
yrn;Dr]kr!rx ;1 r + P j2J P s2R A jr k 1 2 r x 1 2 r A js k 1 2 s x 1 2 s p 0 j ysn;d 1 (js);d 2 (jr)] P j2Rr j +xr P j2Rr 0 j (7) where, in the denominator of the above relation, it is assumed thaty
r
n] is negligible in comparison withx r. From now on, sometimes for simplicity of notation,
the p
j( P
s:j2R s x s) p 0 j( P s:j2R
s x s) j( P
s:j2R s x s), and 0 j( P s:j2R
s x
s) is represented by p j p 0 j j and 0 j, respectively.
Theorem
With the simplifying condition, D r =
D8r 2 R, the sucient condition for the local stability of the proposed Jacobi iteration (Equation 6) can be written as: k r P j2Rr p j P s:j2Rs
x s ! +P j2Rr P s:j2Rs
x s ! p 0 j P s:j2Rs
x s !! P j2Rr p j P s:j2Rs
x s ! +x r P j2Rr p 0 j P s:j2Rs
x s
!
<2sin
2(2D+ 1)
r2R :
(8) Proof
Consider Equation 7, suppose that a vector = (
r
r 2R) exists, such that Equation 7 has solutions in the formyn] =:
n(see Appendix). Local stability
is resulted if one can conclude that all normal modes, , satisfyjj<1.
By substituting the solution yn] = : n in Equation 7, one has for eachr2R:
r n+1 =r n ; kr!rx ;1 r r n;Dr + P j2J P s2R A jr k 1 2 r x 1 2 r A js k 1 2 s x 1 2 s p 0 j s n;d 1 (js);d
2 (jr ) P j2Rr p j 0 @ P s:j2Rs xs 1 A +xr P j2Rr p 0 j 0 @ P s:j2Rs xs 1 A : (9) By canceling
n, multiplying by
D
r and the denition ofD
r, one has for each r2R: r Dr+1 ; Dr + k r ! r x ;1 r r + P j2J P s2R A jr k 1 2 r x 1 2 r d 1 (jr ) A js k 1 2 s x 1 2 s p 0 j s ;d 1 (js) P j2Rr p j 0 @ P s:j2Rs xs 1 A +xr P j2Rr p 0 j 0 @ P s:j2Rs xs 1 A =0: (10) In matrix form, Relation 10 can be rewritten as:
(diag( Dr+1
; Dr
r2R) + ;1
(KX ;1 +K 1 2 X 1 2 A ; ;1 T P 0
A()X 1 2 K 1 2)) = 0 (11) where:
A() = (A jr
;d
1( jr)
j2Jr2R) X= diag(x
r
r2R) = diag(!
r
r2R) K= diag(k
r
r2R) P
0 = diag( p
0 j
j2J) y= (y
r
r2R) and also:
,MI M,X ;1+
X 1 2 A T P 0 AX 1 2 : Assume thatA = a
ij]
B = b
ij], then, operator is the point-wise product of its two matrix operands and is dened as follows:
C=AB)c ij=
a ij
:b ij
8ij: (12)
Equation 11 has solution, i one has: det(diag;
Dr+1
; Dr
r2R
+ ;1
(KX ;1 +K 1 2 X 1 2 A ; ;1 T P 0
A()X 1 2
K 1 2)) = 0
: (13) If all roots of Equation 13 have absolute value less than unity, then, the system in Equation 7 is asymptotically stable.
As in 3], one denes the LHS of Equation 13 to bep(K). The following denition is also made:
C(K), ;1
KX ;1 +K 1 2 X 1 2 A ; ;1 T P 0
A()X 1 2 K 1 2 : (14) The proof is completed in 5 steps (for detailed proof of each step, the interested reader can refer to 3]): Step1
If 0 < a < 2sin
2(2D+1)
then, no roots of D+1
;
D+
a= 0 have absolute value equal to unity 3]. Step2
The maximum absolute value of rootsofp(K) = 0 is continuous inK 3].
Step3
For any K satisfying the hypotheses of the theorem, p(K) = 0 has no roots of absolute value equal to unity, because if there exists = e
i
0 2 ,
then, since ! r x ;1 r = P j2R A jr p
j, the hypotheses of the theorem yields:
;1 r k r ! r x ;1 r + X j2J A jr k r x r p 0 j +X
s6=r k r ;1 r X j2J A jr d1(jr)
A js
;d1(js)
x s p 0 j k r ;1 r X j2R A jr p j+ X s2R X j2J A jr A js d 1(
jr);d 1( js) x s p 0 j ! =k r ;1 r X j2Rr p j+ X j2Rr X s:j2Rs
x s p 0 j ! <2sin
2(2D+ 1)
r2R : (15)
The rst line of Equation 15 is the absolute row sum of the row `r' of the matrix K
;1( X
;1 + A(
;1)T P
0
A()X). Since the spectral radius of any square matrix is bounded by its maximum absolute row sum (jj:jj1 by denition) 12], one has the bound: (C(K))
= ;1
KX ;1+
K 1 2 X 1 2 A ; ;1 T P 0
A()X 1 2 K 1 2 = ;1 K X ;1+
A ; ;1 T P 0
A()X
<2sin
2(2D+ 1)
(16)
where() is the spectral radius operator.
Equation 16 reveals that the spectral radius of C(K) is bounded. If, by the theorem assumption, D
r =
D, then the characteristic Equation 13 can be written more simply as:
det;; D+1 ; D
I+C(K)
= 0: (17)
The eigenvalues of the matrix;
D+1 ;
D
I+C(K) are equal to the eigenvalues of the matrixC(K) plus
D+1 ;
D. Also, a matrix is singular i at least one of its eigenvalues is equal to zero 12]. From Equation 17 and the mentioned facts one concludes that at least for oner2R:
D+1
; D+
r= 0
(18)
where
r is an eigenvalue of the matrix
C(K). From the bound in Equation 16 and Step 1, it can be concluded that Equation 18 is a contradiction. Thus,p(K) = 0 has no roots of absolute value equal to unity.
Step4
There exists a K satisfying the hypotheses of the theorem, such that all rootsofp(K) have absolute value less than unity.
For convenience, one assumes that R = f12Ng. Dene R
n =
f12ng. One may denote by p
n(
K) = 0, the characteristic equation dened by the subnetwork of routes in R
n mathe-matically, this corresponds to replacingC(K) with the submatrix C(K) = (C(K)]
rs
rs 2 R n) in Equation 17. The result is proven, inductively, on `n'. Case n= 1
In this case, Equation 6 can be written simply in the following form:
xn+1]=xn]+k
(!;xn;D]pn;D]) pn;D]+xn;D]p
0 n;D]
: (19) By linearization, Equation 19 reduces to:
yn+ 1] =yn];kyn;D]: (20) Its characteristic equation is equal to:
D+1
; D+
k= 0: (21)
If `k' is selected such that it satises Inequality 22, it is proven in 3] that the system in Equation 19 is asymp-totically locally stable and all roots of Equation 21 have absolute value less than unity.
k<2sin
2(2D+ 1)
In 3], the authors inductively assume that there exist parametersk1k2k
n;1, such that all roots, , of p
n;1(
K) = 0 have absolute value less than unity and, by the Implicit Function Theorem 13], they show that all of the roots of the equation,p
n(
K) = 0, have absolute value less than unity.
If one takesn=N, then, p n =
p and, thus, one can nd a vectorK
= (
k1k2k
N) satisfying the hypotheses of the theorem, such that all of the roots of p(K) = 0 have absolute value less than unity. Step5
Suppose that for some K satisfying the hypotheses of the theorem, p(K) = 0 has a root of absolute value greater than unity. Consider the path K(t) = tK
+(1
;t)K, for 0t1. All roots ofp(K(1)) = 0 have absolute value less than unity by Step 4 so by Step 2 (continuity of maximum absolute value of roots), there exists `t', such that p(K(t)) = 0 has a root `' of absolute value unity. But, since K(t) satises the hypotheses of the theorem (bothK
and K satisfy the hypotheses of the theorem as does any convex combination), this is a contradiction to Step 3. So, one concludes that no suchKexists, i.e. for all Ksatisfying the hypotheses of the theorem,p(K) = 0 has all roots of absolute value less than unity.
With assumption = 1, from Equation 15 and the denition ofjj:jj1, one can conclude that:
;1 K
;
X
;1+ A
T P
0 AX
1
<2sin
2(2D+ 1)
: (23)
If one denes ;, ;1
KM, one has: trace(;) = jRj
X r=1 k
r
(24)
where the operatorj:j is the cardinality operator and represents the number of the elements of its argument set. ; is a positive matrix.
As spectral radius of any square matrix is bounded by its maximum absolute row sum 12], from Inequality 23, it is clear that:
;1
K ;
X ;1+
A T
P 0
AX
=(;) =max(;)<2sin
2(2D+ 1)
: (25)
From Equation 25, one can write: jRj
X r=1
r
<2jR jsin
2(2D+ 1)
: (26)
On the other hand, from Equation 24: jRj
X r=1
r= trace(;) = jRj X r=1 k
r
: (27)
From Relations 26 and 27, one has: jRj
X r=1 k
r
<2jR jsin
2(2D+ 1)
: (28)
If one assumes,k r=
k8r2R, then: k<2sin
2(2D+ 1)
: (29)
An important interpretation of Relations 28 and 29 is lack of dependency of the stability condition to the equilibrium `x' vector, in contrast with Relation 5. For example, in the special case ofD= 0, one has:
k<2:
So, network users can select their condent `k' param-eter, independent of the network condition. Also, if, in Equation 29, users can estimate their propagation delay, D, using any end-to-end protocol, they can select their appropriate `k' based on Inequality 29 in a distributed manner.
Although, the conditions have been simplied by this assumption that all network users have the same propagation delays, in the general case of dierent propagation delays, the algorithm has been simulated and the simulation results justify the author's claims, even in a general network.
SIMULATION RESULTS
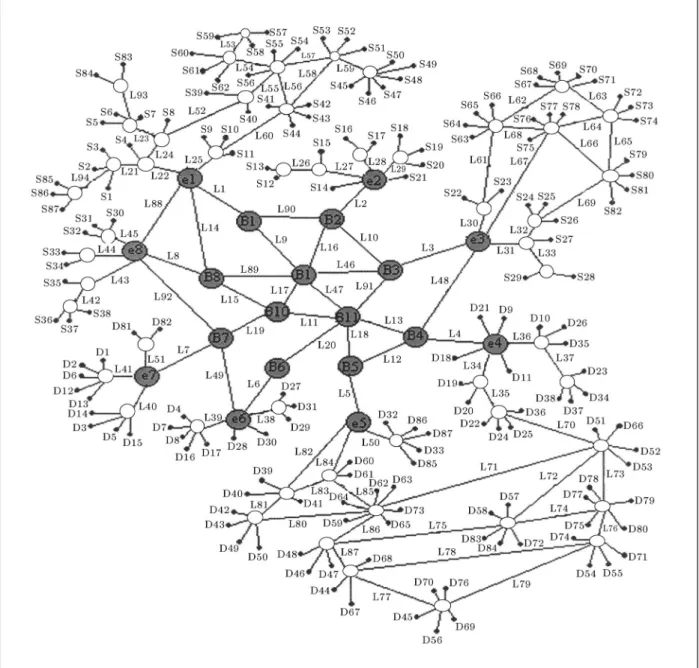
In the current section, a similar approach has been adopted to that of Walrand 14] and Ba sar 15], for simulating the rates allocated to the users with dierent propagation delays. An OPNET discrete-event simu-lator is used for simulation purposes. The simulated network, which is depicted in Figure 1, is composed of 87 elastic users and 94 unidirectional links. Gray nodes are the network's backbone boundary. All links' propagation delays are set to 5 ms. It has been assumed that sources have data for sending at all times (greedy sources). All links' buer sizes are set to 100 packets and so loss occurs in the network.
The go backnmethod has been used for resending the packets that are double acknowledged. The links' scheduling discipline is FIFO. As in TCP, the Slow-Start method is used for initializing the rate allocation. Receivers' window sizes are set to unity and sender window size, in the Kelly and Jacobi method, is
Figure1. Simulated network topology with 87 users and 94 links. updated according to Relations 30 and 31, respectively:
cwndr
n+ 1] = (
cwndr n] +k
r RTT
r n]
! r
; cwndr
n] RTTr
n] d
r n]
)+
(30)
CWNDr
n+ 1] = (
CWNDr n] +K
r RTT
r n]
!
r ;
CWNDr n+ 1] RTTr
n] d
r n]
= h
!
r RTT
r n] CWNDr
n] +
CWNDr n] RTTr
n] (d
r n];d
r n;1])
i
)+
(31)
where: d
r
n] = RTT r
n];d r
(32)
d
r is the user `
r' propagation delay and its round trip time is RTTr. Here,
k r=
K r= 0
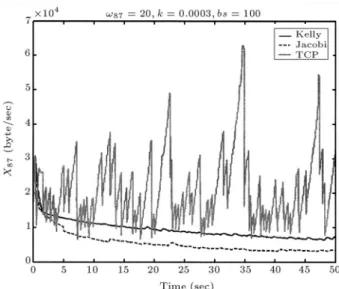
:0003 has been used. The simulation results for users in Figure 1 are depicted in Figures 2 to 5. In these gures, the Jacobi method has been compared with Kelly's method
Figure2. Rate allocated to user 14 in dierent methods.
Figure3. Rate allocated to user 22 in dierent methods.
Figure4. Rate allocated to user 44 in dierent methods.
Figure5. Rate allocated to user 87 in dierent methods. and TCP. It can be veried that despite stability, the Jacobi method outperforms that of the Kelly method in convergence speed.
On the other hand, another outstanding feature of the second-order rate allocation strategy is that the user rates in the Jacobi and Kelly methods have less uctuation with respect to TCP. Also, the rate alloca-tion is TCP-friendly because none of the allocated rates in the Jacobi or Kelly methods are greater than their corresponding TCP rate allocation. The link capacities in the backbone are considered to be 100 KBps and other link capacities are considered much higher and are equal to 10 MBps.
As Equations 30 and 31 use only the RTT and propagation delay of the connection, they can be implemented in an end-to-end manner, even in the current Internet.
CONCLUSON
In this paper, a second-order technique has been proposed, which allocates proportionally-fair rates to network users. The convergence speed of the proposed algorithm is improved by using a high-speed algorithm (such as the Jacobi or approximate Newton method). The stability property of the proposed method, in the presence of propagation delays, is proved under certain limiting conditions. The stability property of the proposed method, in general, has been veried using simulation.
REFERENCES
1. Chong, S., Nagarajan, R. and Wang, Y.T. \Designing stable ABR ow control with rate feedback and open loop control: First-order control case", Performance Evaluation,34, pp 189-206 (1998).
rate-based ow control with dynamic queue threshold for high-speed wide-area ATM networks", Computer Networks and ISDN Systems,29, pp 2201-2212 (1998).
3. Johari, R. and Tan, D. \End-to-end congestion control for the internet: Delays and stability",IEEE Trans. on Networking,9(6), pp 818-832 (Dec. 2001).
4. Kelly, F.P., Maulloo, A.K. and Tan, D.K.H. \Rate control for communication networks: Shadow prices, proportional fairness and stability", J. Operation Re-search Society,49(3), pp 237-252 (Mar. 1998).
5. Massoulie, L. \Stability of distributed congestion con-trol with heterogeneous feedback delays", Microsoft Research Technical Report 2000-111.
6. Altman, E., Basar, T. and Srikant, R. \Congestion control as a stochastic control problem with action de-lays",Automatica Apr.,35(12), pp 1937-1950 (1999).
7. Golestani, S.J. and Bhattacharyya, S. \A class of end-to-end congestion control algorithms for the internet",
Proceedings of ICNP, pp 137-150 (Oct. 1998). 8. Shenker, S. \Fundamental design issues for the future
Internet",IEEE J. Selected Areas Commun.,13(7), pp
1176-1188 (Sept. 1995).
9. Bellman, R. and Cooke, K.L., Dierential-Dierence Equations, Academic Press: New York, USA (1980). 10. Gudarzi, P., Saidi, H. and Sheikholeslam, F. \A
fuzzy-hierarchical algorithm for proportionally-fair rate allo-cation to elastic users", IEICE Trans. on Commun.,
E87-B(11), pp 3203-3215 (2004).
11. Gudarzi, P. \Designing optimal rate allocation algo-rithms in data networks", Ph.D. dissertation, under preparation, Isfahan Univ. of Tech. (IUT), Isfahan, Iran.
12. Bertsekas, D. and Tsitsiklis, J., Parallel and Dis-tributed Computation, Englewood Clis, NJ: Prentice-Hall, USA (1989).
13. Khalil, H.K., Nonlinear Systems, 2nd Ed., Prentice-Hall, USA (1995).
14. Mo, J. and Walrand, J. \Fair end-to-end window-based congestion control", IEEE/ACM Transactions on Networking,8(5), pp 556-567 (Oct. 2000).
15. Alpcan, T. and Basar, T. \Utility-based congestion control schemes for internet-style networks with de-lays",INFOCOM(2003).
APPENDIX
By using a similar approach to that of Kelly 4], Equation 7 can be written in its matrix form as:
0 B B B @
yn+ 1] yn]
... yn;D^+ 1]
1 C C C A
=T 0 B B B @
yn] yn;1]
... yn;D^]
1 C C C A
(A1)
where, ^D , max jrs
fd2(jr) + d1(js)gyn] = (y
r
n]r2R) and, with the simplifying condition, D
r=
D8r2R, matrix
T
is dened as follows: T ,2 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 6 4
I; ;1
L0] ; ;1
L1] ; ;1
; KX
;1+ LD]
I 0 0
0 I :
0 :
: : :
I
: : 0
:
: : :
:
0 0 0
; ;1
L ^D;1] ; ;1
L ^D]
0 0
: :
: :
: :
I 0
3 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 7 5
(A2)
where the parameters K and X have been de-ned previously and the jR j jR j matrices (Ld]d = 01D^) are dened as follows:
(Ld]) rs
, X j2J p
0 j
A jr
A js
k 1 2 r k
1 2 s x
1 2 r x
1 2 s I
d2(jr) +d1(js) =d] (A3) whereI:] is, in fact, a logical operator that returns the value 1 if its argument is a true statement, otherwise it returns the value 0.
If one denes: Yn],
;
yn] yn;1] yn;D^]
T
: (A4)
It can be seen that by replacing matrix
T
from Relation A2 into Equation A1, Equation 7 can be obtained. From the above denition, Equation A1 can be rewritten in the following form:Yn] =
T
nY0]: (A5)
One can simply verify that the following can be a solution vector for the linear Equation A5:
Yn] = ^ : n
In linear algebra, it has been proved that ^ is an arbitrary eigenvector of the matrix
T
n (and alsoT
) andn is its associated eigenvalue of both matrices. From the condition in Inequality 8 and assuming Equation A6 for the solution vector, it has been concluded, by the proposed theorem, that all of the parameters, , that satisfy Equation A6 have an absolute value that is less than unity. Thus, matrices
T
andT
n have not any eigenvalue with absolute value greater or equal to unity.Now, assume that there exists an arbitrary
solu-tion vectorY i
n] for the linear system (Equation A5): Y
i n] =
T
n Y
i0]
8i: (A7)
As mentioned in the proposed theorem, matrix
T
n has not any eigenvalue with absolute value greater than, or equal to, unity. Thus, the solutionYi
n] in Equation A7 converges to 0 as `n' goes to innity. So, selecting the special form (Equation A6) for the solution has not any in uence on the generality of the problem and is reasonable.