A multicriteria heuristic method to improve resource allocation in
multiproject scheduling
Antonio Lova
*, Concepci
on Maroto, Pilar Tormos
Department of Statistics and Operational Research, Universidad Politecnica de Valencia. Camino de Vera s/n, 46071 Valencia, Spain
Abstract
Many works published in the area of project management make reference to the scheduling of single projects and time objectives like minimising project duration. Nevertheless, frequently companies manage various projects which share a pool of constrained resources, taking into account other objectives in addition to time. In order to add ¯exibility in using project scheduling tools, we have developed a multicriteria heuristic that improves lexicographicly two criteria: one time type ± mean project delay or multiproject duration increase ± and one no time type ± project splitting, in-process inventory, resource levelling or idle resources ± that can be chosen by the user. The multicriteria heuristic algorithm consists of several algorithms based on the improvement of multiproject feasible schedules. Through an extensive computational study, we have shown that this method improves the feasible multiproject schedule obtained from heuristic methods based on the priority rules coded Maximum Total Work Content (MAXTWK) and Minimum Latest Finish Time (MINLFT) as well as project management software ± Microsoft Project, CA-SuperProject, Time Line and Project Scheduler. Ó 2000 Elsevier Science B.V. All rights reserved.
Keywords: Project management; Multiproject scheduling; Resource allocation; Project management software; Multicriteria heuristic algorithm
1. Resource allocation in multiproject scheduling
Frequently, the availability of the resources assigned to a project is limited and often not suf-®cient to concurrently execute the elegible activi-ties. In this situation, decisions must be made about their scheduling that in many cases imply an increase in project completion time. Thus project
scheduling becomes a problem of a combinatorial nature that can only be solved by exact methods for small projects.
The resource-constrained project scheduling problem has been studied in the literature through two approaches: the scheduling of a single project and the scheduling of multiple simultaneous pro-jects. In the ®rst case, minimising project duration has been one of the most dominant problems studied (Wiest, 1963, 1967; Davis and Patterson, 1975; Cooper, 1976;Alvarez-Vald es and Tamarit, 1989; Boctor, 1990; Ozdamar and Ulusoy, 1995; Kolisch and Hartmann, 1998). In contrast, there
*Corresponding author. Tel.: 3877490; fax:
+34-96-3877499.
E-mail address:[email protected] (A. Lova).
0377-2217/00/$ - see front matter Ó 2000 Elsevier Science B.V. All rights reserved.
are few studies involving the scheduling of several projects with common and constrained resources. In these works, the problem is solved using heu-ristics based on priority rules. These heuheu-ristics have been one of the most used methods to solve the resource-constrained project scheduling prob-lem due to the fact that they are fast in terms of the computational eort, obtain good results even for large size projects and they are easy to integrate into a project management tool (Kolisch, 1996).
Additionally, multiproject scheduling can be carried out with two approaches: Multi-Project
andSingle-Project approach. In the ®rst, projects are independent and in the second, projects are arti®cially bound together into a single project by the addition of two dummy activities: `start' and `end' of the single project. Both approaches will produce dierent schedules with some priority rules due to the fact that in the single-project ap-proach parameters of the activities are obtained from the single project duration, whereas in the multi-project approach these parameters are cal-culated from the duration of each individual pro-ject. To obtain a multiproject feasible schedule we can choose one of the two approaches.
The pioneering work of multiproject scheduling by Fendley (1968) used multiprojects with three and ®ve projects and considered three eciency measurements in the computational analysis: Project slippage, Resource utilization and In-pro-cess inventory. The most important conclusion of this work is that the priority rule Minimum Slack First (MINSLK) obtains the best eciency with the three response variables.
Kurtulus and Davis (1982) designed multipro-ject instances whose promultipro-jects have between 34 and 63 activities and resource requirements for each activity between 2 and 6 units. They show six new priority rules especially adapted to the multipro-ject problem. These rules are Shortest Activity from the Shortest Project, Longest Activity from the Longest Project, Maximum Operation First, Maximum Slack First, Minimum Total Work Content and Maximum Total Work Content. Kurtulus and Davis show in their computational experience that the priority rules Maximum Total Work Content (MAXTWK) and Shortest Activity from the Shortest Project (SASP) are the best
al-gorithms to schedule multiprojects when the ob-jective is to minimise the mean project delay.
Penalties due to the projects delay have been studied by Kurtulus and Narula (1990). They an-alyse this problem with multiproject instances of three projects in which activity numbers are be-tween 24 and 33 for small-sized problems and between 50 and 66 activities for large-sized prob-lems. The priority rules used in previous works are modi®ed by adding penalty to the projects delay. Six penalty functions and four new priority rules based on penalties are analysed: Maximum Du-ration and Penalty, Maximum Penalty, Maximum Total Duration Penalty and simultaneously Slack and Penalty. As one of the most important con-clusions, the priority rule Maximum Penalty is the best algorithm when minimising the sum of the project weight delay.
Dumond and Mabert (1988) have studied the problem of assigning due dates to the projects in a multiproject environment. Each project has be-tween 6 and 49 activities with 24 activities on av-erage whose resource requirements are between 1 and 3 types of resources simultaneously. In this work, ®ve resource allocation heuristics and four strategies to assign due dates to the projects are analysed: Mean Flow, Number of Activities, Critical Path Time and Scheduled Finish Time. The computational experience shows that the pri-ority rule First Come First Served (FCFS) with the strategy Scheduled Finish Time Due Date rule is the best algorithm for minimising the mean com-pletion time, the mean lateness, the standard de-viation of lateness and minimising the total tardiness.
A model to control projects has been developed by Tsubakitani and Deckro (1990). They coded the SASP priority rule to schedule multiprojects with more than 50 projects which can have more than 100 activities. The model has an UPDATE routine that allows the project manager to update the projects when they are in execution. In the same year, Bock and Patterson (1990) designed a com-putational experience based on the work of Du-mond and Mabert with three factors: Due Date Setting Strategy, Algorithm based on priority rule and Resource Preemption Strategy. This work shows that the priority rules FCFS and
MINSLK(DD) have the best performance mini-mising mean weighted lateness and mean absolute lateness. After this, Lawrence and Morton (1993) studied the due date setting problem and devel-oped an algorithm with a good performance minimising mean weighted tardiness and mean weighted delay.
Finally, Wiley et al. (1998) developed a method utilizing Work Breakdown Structure (WBS) and Dantzig±Wolfe decomposition to generate feasible aggregate level multiproject program plans and schedules. The Dantzig±Wolfe procedure provides a means of generating interim solutions and their appropriate funding pro®le. The decision maker may then choose any one of these solutions besides the optimal solution based upon his/her own ex-perience and risk tolerance.
From most of these works, we can conclude that heuristics based on priority rules with the multi-project approach perform better than the ones based on the single-project approach for minimising mean project delay. Nevertheless, the rules based on a single-project approach are more ecient minimising multiproject duration increase (Kurtulus and Davis, 1982;Ozdamar and Ulusoy, 1995).
In this literature review, we have found some gaps. The characteristics of the multiproject in-stances used are not justi®ed and the objectives analysed have been studied separately. To ®ll these gaps, we have designed a survey carried out in the Valencian Region-Spain (Lova, 1997). The com-pany sectors of the survey are made up of small and medium-sized companies from the area of construction, textile, computers and information systems and public administrations. 1000 surveys were sent out of which we received 202, a response rate of approximately 20%.
The survey is divided in three parts: general characteristics of the companies, characteristics of the activities, resources and projects ± single and multiple projects ± and ®nally to what extent project scheduling techniques are being used. One of the main results of the survey was to quantify how many companies work with single projects and how many with several projects simulta-neously sharing a pool of resources. The results are conclusive; 84% of the companies which
re-sponded to the survey indicated that they work with multiple projects. This data is in line with the work by Payne (1995) that indicates that up to 90% of all projects occur in the multiproject context. Another result indicates the predomi-nance of projects with less than 50 activities (84%) and about 95% of the projects have less than 100 activities.
On the other hand, a further analysis of the use of standard and non-standard software scheduling tools highlight their use in the allocation of re-sources to project activities, improving project control and aiding decision making. Nevertheless, companies indicate that project scheduling tech-niques need to have more ¯exibility for the prac-titioner. That is to say, companies frequently manage various objectives at the same time and the project scheduling software needs to be adapted to these needs.
The ®rst objective of this work is, therefore, to add ¯exibility to companies scheduling projects with several criteria through the development of a multicriteria heuristic method to improve resource allocation in multiproject scheduling. This multi-criteria algorithm includes aspects such as time ± mean project delay or multiproject duration ± as well as project splitting, in-process inventory, re-sources levelling or idle rere-sources.
Additionally, due to the wide-spread use of standard project management software it is nec-essary to analyse and improve their capabilities and performance considering objectives in addi-tion to time. Therefore, the second objective of this work is to analyse the project management soft-ware together with the classical algorithms in the context of multiproject scheduling considering time and no time criteria.
2. Previous de®nitions and concepts
A multiproject schedule is de®ned as a set of start times (STij) of the activities of the projects. The completion time of each project (Fi) is the latest completion time of the activities of the pro-ject; therefore, max Fi will be the duration of the multiproject. In this context, amultiproject feasible schedule is a multiproject schedule for which the
resource constraints and the precedence relation-ships are not violated.
The multicriteria algorithm is based on the concepts of local/global left/right shift activity into its feasible schedule maintaining the feasibility of the schedule (Wiest, 1964). These concepts were analysed by Baker (1974) for the Job-Shop prob-lem and applied to the resource-constrained pro-ject scheduling problem by Sprecher (1994) and Sprecher et al. (1995) and can be generalised to a multiproject context.
We de®ne two types of free slack into a multi-project feasible schedule: Forward Free Slack (FFS) and Backward Free Slack (BFS) of the ac-tivities (Lova, 1997). The FFS of an activity into a feasible schedule is the amount of time that the activity can be shifted right allowing the successors to start on their scheduled dates. This is the clas-sical de®nition of Free Slack on the Critical Path Method. It does not take into account the resource constraints. The FFS of an activityjof the project
iis calculated by the minimum scheduled start time of the successor activities ofjminus its scheduled ®nish time.
The BFS of an activity is the amount of time that the activity can be shifted left allowing the predecessors to start on their scheduled dates and it does not take into account the resource con-straints. The BFS of an activityjof the projectiis calculated by its scheduled start time minus the maximum scheduled ®nish time of the predecessor activities ofj.
These concepts are applied in the successive Forward and Backward pass of the multicriteria algorithm. Generally, a Forward Pass is a process that starts at the beginning of the multiproject ± earliest scheduled start of the projects in the mul-tiproject environment ± and ®nishes at the end of the multiproject ± latest scheduled ®nish of the projects, whereas a Backward Pass is a process that starts at the end of the multiproject and ®n-ishes at the beginning of the same.
Speci®cally, the Backward Pass is applied to a multiproject feasible schedule where all the activ-ities have BFS equal to zero through the following steps:
Step 1. From a multiproject feasible schedule, anactivity list is compiled and sorted by
decreas-ing order of the scheduled ®nish time of the ac-tivities. All activities of the projects are therefore merged into theactivity list.
Step 2.One activity is selected from theactivity liststarting at the top, i.e. the selected activityaijis that with the greatest scheduled ®nish time. For this activity its FFS is calculated and is locally or globally shifted right as late as possible to a fea-sible position into its FFS, rescheduling its scheduled start time (STij). In this way, the FFS of the predecessor activities can increase and they will have the possibility of shifting the activities even further to the right. Activities with scheduled ®nish time (FTij) equal tomax Ficannot be shifted right. The selected activity aij is removed from the
activity list.
Step 3. Step 2 is repeated until activity list is empty.
In the case of the Forward Pass, it obtains a multiproject feasible schedule where all the activ-ities have BFS equal to zero. This pass is applied with the following steps:
Step 1. Ifwe do not have a multiproject feasible schedule, then we apply a heuristic based on a priority rule. STOP
Otherwise, from the multiproject feasible schedule, anactivity listis compiled and sorted by increasing order of the scheduled start time.
Step 2.One activity is selected from theactivity liststarting at the top, i.e., the selected activityaij
is that with the smallest scheduled start time. For this activity its BFS is calculated and is locally or globally shifted left as early as possible to a fea-sible position into its BFS, rescheduling its scheduled start time (STij). In this way, the BFS of the successor activities can increase and they will have the possibility of shifting the activities even further to the left. The selected activity aij is re-moved from theactivity list.
Step 3. Step 2 is repeated until activity list is empty.
3. The multicriteria heuristic method
The multicriteria heuristic algorithm for multi-project scheduling has two phases. It starts from a feasible multiproject schedule and it improves
lexicographicly two criteria: one time type and one no time type. First, it obtains a good schedule for the multiproject with one time criterion ± mini-mising the mean project delay or minimini-mising the increase in multiproject duration. Second, it im-proves the ®rst phase schedule with the no time criterion: Project splitting, In-process inventory, Resource levelling or Idle resources. In the second phase, when the multiproject schedule is improved with a no time criterion, the time criterion of the ®rst phase will never make it worse. In other words, the completion time of the projects ± if the time criterion is to minimise mean project delay ± or the completion time of the multiproject ± if the time criterion is to minimise multiproject duration increase, will never be increased. The initial mul-tiproject schedule will be improved by time and no time criteria which the user can choose (Fig. 1).
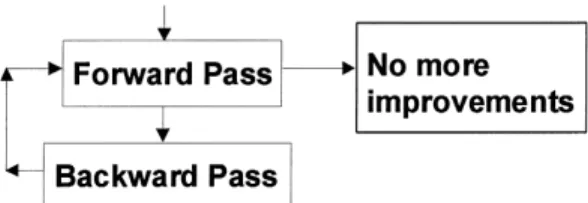
The First Phase involves a multipass method, concretely aForward±Backward scheduling method
(Kolisch and Hartmann, 1998) similar to the one applied by Li and Willis (1992) andOzdamar and Ulusoy (1996) to single project scheduling. The process consists of an iterative Forward±Back-ward pass until no time improvement can be
achieved (Fig. 2). The feasible schedule obtained by the Forward Pass is used by the Backward Pass and vice versa. This process obtains a good schedule of the multiproject with the time criteri-on.
The iterative Forward±Backward pass requires at Step 1 of the ®rst Forward Pass a heuristic based on priority rules to obtain the initial multi-project feasible schedule and to start the iterations. If the time criterion is to minimise mean project delay, we use the parallel priority rule MAXTWK with a multi-project approach. Whereas if the objective is to minimise the increase in multipro-ject duration, we use the parallel priority rule Minimum Latest Finish Time (MINLFT) with a single-project approach. These priority rules have been some of the most used and ecient rules in previous studies for the time objectives considered (Kurtulus and Davis, 1982; Alvarez-Valdes and Tamarit, 1989; Boctor, 1990, Kolisch and Hart-mann, 1998).
If the multi-project approach is used, the com-pletion time of the projects are considered as upper bounds in every pass. In the Backward Pass, activities with FTij equal to Fi cannot be shifted
right and change their scheduled dates. We are therefore sure that in an iteration the multiproject schedule will never make it worse with this time criterion. In the Forward Pass, activities can be shifted left until time is equal to zero and the pro-cess can reduce the completion time of the projects (Fi). Themean project delay, as a measure of e-ciency of the multiproject schedules with a multi-project approach, is calculated as the average of the resource-constrained completion time of each project minus the unconstrained critical path of the same.
In the single-project approach, when the itera-tive Forward±Backward pass is applied, the mul-tiproject duration (max Fi) is considered as the upper bound. When projects are closely related due to economical or technical reasons, it is in-teresting to ®nish the multiproject considered as a single project, as early as possible. That is, the objective is to minimise the increase in single project duration. In the Backward Pass, activities can be shifted right until max Fi and in the For-ward Pass activities can be shifted left until time is equal to zero and the process can reduce the completion time of the multiproject (max Fi). In the single-project approach it is assumed that the completion time of each project (Fi) can be known. Themultiproject duration increasecan be measured in a multiproject schedule with a single-project approach as a percentage, that is: ((MaxCTi)Max
CPj)/Max CPj)´100, where CTi is the resource-constrained completion time of projectiandCPjis
the unconstrained critical path of project j. This measure indicates the multiproject duration in-crease considering the initial multiproject duration as the unconstrained latest completion time of the projects and the ®nal multiproject duration as the latest completion time of the projects after solving the resource con¯icts.
For both time criteria, if after the application of a Backward Pass, the scheduled start time of all activities in the schedule is greater than zero, then all activities of the multiproject will have BFS and the next Forward Pass will improve the multipro-ject schedule with the time criterion chosen. Therefore, the iterative Forward±Backward pass will always ®nish with a Forward Pass.
The Backward Pass and the Forward Pass can be coded through a serial scheme and a priority rulein which activities are selected to be resched-uled in the order of theactivity list.In the Forward Pass the original precedence network is used and in the Backward Pass the reverse precedence net-work is used.
The Second Phase consists of several feasible schedule improving algorithms based on the For-ward Pass and/or the BackFor-ward Pass that is dif-ferent for each criterion. A Backward Pass is applied to improve Project splitting, In-process inventory or Resource levelling, and a Backward± Forward Pass is applied to improve Idle Re-sources, always maintaining the good results ob-tained by the time criterion considered in the ®rst phase.
3.1. Project splitting
Frequently, continuity in the execution of pro-jects is an important factor for several reasons. In fact, project splitting can cause a great deal of additional eort for some companies to control projects. Furthermore, continuity of the projects in time implies higher quality in their execution by allowing the project manager to control projects easier. When projects share a pool of resources it is possible that in the scheduling process projects can be split. In this sense, a project already started is split at a moment when no activity of the project is in execution. After this moment, in the future, the project continues its execution.
To improve a multiproject schedule with this criterion, we propose a Backward Pass where ac-tivities are not shifted right to feasible positions as late as possible into its FFS. Activities are shifted right to the position that minimises project split-ting. If there are several positions that obtain the Fig. 2. Iterative forward±backward pass.
same minimum value of the criterion, the activity is shifted right as late as possible. This criterion can be measured as the number of days on average that a project is split from the beginning of the project until its completion time.
3.2. In-process inventory
In-process inventory can be de®ned as the amount of work that cannot be processed imme-diately due to the limitation of resources (Fendley, 1968). This inventory has an important cost for many companies ± handling and storage ± and it is an indicator of ineciency if it exists in a great amount. An activity ij has in-process inventory when its FTij is smaller than all the STik of the activities k successors of j. In this way, the work performed by the activityijis not processed by its successor activities during (min STik) ± FTij units of time. In order to improve this criterion we apply a Backward Pass in which each activity tries to reach its successor activities. This criterion can be measured by a ratio between the sum of the amount of time that the In-process inventory is waiting from the end of the activityijuntil a suc-cessor activity continues the work for each activity and the number of activities of the multiproject.
3.3. Resource levelling
The ideal histogram of resource requirements is a rectangle delimited by the multiproject duration and the resource availability. However, this situa-tion is not usual in resource-constrained project scheduling. In practice, daily requirements of a resource vary depending on the needs of the ac-tivities that are scheduled simultaneously. This criterion for each resource can be measured by the variance of the requirements. Nevertheless, mini-mising the variance of resource requirements of a resource is equivalent to minimising the sum of the squares of the resource requirements of this re-source (Burgess and Killebrew, 1962; Levy et al., 1963; Woodworth and Willie, 1975).
When more than one type of resource is as-signed to each activity, the objective will be to
minimise the sum of the squares of the resource requirements of each individual resource. To im-prove this criterion we apply a Backward Pass where activities are shifted right into its FFS to the feasible position that minimises the sum of the squares of the resource requirementsfor each indi-vidual resource. It is important to note that when we improve this criterion, it is possible to reduce the availability of the resources that are necessary to execute the multiproject. As in the Burgess and Killebrew algorithm, the Backward Pass can be repeated until no improvement is achieved.
The variance of the resource requirements has an important drawback: the dependecy of the scale and measurement units of each resource. For this reason, when activities use more than one type of resource at the same time we cannot measure the eciency of the schedules neither with the sum of the squares of resource requirements of all the resources nor with the average of the variance of the requirements of the resources. To solve this drawback we propose measuring the eciency of the multiproject schedule with the Coecient of Variation (di) that can be compared with other
coecients of variation and is de®ned as a ratio between the standard deviation and the average. This parameter has no dimensions and theMean Coecient of Variation E dican be calculated as
a ratio between the sum of the Coecient of Variation of each resource and the number of types of resources (Lova, 1997). Thus, the smaller the Mean Coecient of Variation the greater the Resource Levelling. This measure is de®ned as (1).
E di PK i1 var xi p E xi K ;
whereK is the number of types of resources:
1
In this expression,xi is the variable amount of resource i required daily by the activities of the multiproject along the feasible multiproject dura-tion. It is important to note that the coecient of variation of each resource can be weighted based on some rational basis, such as cost or manage-ments utility for the variation of a resource. In this context, the objective of the improving algorithm would be to minimise the sum of the weighted coecients of variation.
3.4. Idle resources
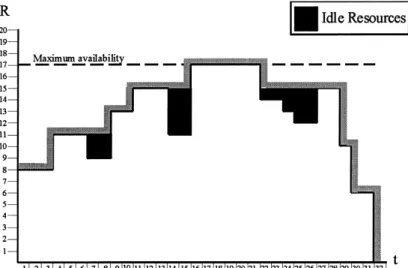
In general, a unit of a resource is idle in a moment when it is available for the multiproject but it is not assigned to any activity. In the context of constant availability, the only way to minimise idle resources is to minimise multiproject duration. To supply another de®nition of idle resources we consider that one unit of a resource assigned to the multiproject will continue being assigned from the ®rst instant in which the unit is used until this unit is not needed by the multiproject (Lova, 1997). With this de®nition, one unit of resource will be idle when, being assigned to the multiproject, the activities of the multiproject do not need it. In our situation, we consider that the availability of each resource is the maximum requirement available.
The ideal histogram in order not to have idle resources with this de®nition is a rectangular his-togram or like stairs ± ascending, descending or ascending and descending. If the histogram is like the latter case, the multiproject manager knows that he/she will have a process to assign resources and a process to free resources, e.g., with this de®nition, if some expensive resource needs to be shipped to the main oce from far away, this re-source is not assigned to the multiproject during all the multiproject duration; the project manager will assign it from the ®rst instant in which this
resource is used until it is not needed by the mul-tiproject activities, therefore this resource will have lower idleness than if the project manager assigns it during the multiproject duration. In Fig. 3 we show idle resources as we have just de®ned. To improve the multiproject schedule with this crite-rion we apply a Backward Pass from the half of the multiproject duration to the beginning of the schedule and a Forward Pass from the half of the multiproject duration to the end of the multipro-ject schedule. Both passes imply shifting activities to the middle of the multiproject schedule ± as around the half of the multiproject duration.
This criterion can be measured by the maxi-mum of the idleness of the resources. That can be measured as the relationship between the resource requirements histogram and the resource avail-ability histogram as a percentage of idle resources. It is important to note that the availability of each resource at time t is calculated in function with the idle resources previously de®ned.
4. Methodology to evaluate the performance of the multicriteria heuristic method
In order to evaluate the eciency of the algo-rithms integrated into the multicriteria heuristic method with the dierent criteria, a computational
experiment has been designed. The characteristics of the multiproject instances considered are ob-tained through the survey carried out in the Val-encian Region-Spain (Lova, 1997) together with the multiproject characteristics of the literature review (Fendley, 1968; Kurtulus and Davis, 1982; Kurtu-lus and Narula, 1985; Dumond and Mabert, 1988; Tsubakitani and Deckro, 1990; Bock and Patter-son, 1990; Lawrence and Morton, 1993). On the one hand, results can be applied to a large number of companies and on the other hand results can be comparable to those found in the literature. These multiproject instances have been used by Lova (1997); Maroto et al. (1997); Maroto et al. (1998).
The multiproject instances have four or eight projects whose activities are subject to ®nish±start precedence constraints with zero time lag. All the projects in each multiproject have 30 or 60 activi-ties with preemption not allowed. Each activity has a single execution mode with a ®xed integer duration between 1 and 10 time units. In this way, small-sized problems have 120 activities and large-sized problems have 480 activities. Complexity of the network is ®xed to 3, where complexity is de-®ned as a ratio between Number of Arcs and Number of Nodes. The factor Nodes per Level
(Maroto et al., 1996) which measures the grade of parallelism of the project activities is ®xed between three and ®ve. Thus, each project has on average four activities in parallel. The Overload Factor used was de®ned by Kurtulus and Davis (1982) where the rank of the values of AUFkare between 0.6 and 1.6. This parameter for the resource typek
is de®ned as (2). AUFkM1 XM L1 WSL;k Rmax;kSL; where W SL;k Xb ta XM i1 XNi j1 rijk Xijt: 2 Xijtis 1 if activityjof projectiis active at timet
and 0 otherwise,Ni is the number of activities of project i, S1CP1 (critical path duration of pro-ject 1),S2CP2ÿCP1;. . .andSM CPMÿCPMÿ1 (where M denotes the number of projects of the multiproject),aCPLÿ11;bCPL andRmax;k is
the availability of resource typek.
A value of 0.6 of AUFk means a low overload
and a value of 1.6 means a high overload. In our design, this factor has two levels: 0.8 and 1.2. In this way half of the multiproject instances have a low-medium overload and the other half have a medium-high overload. The multiproject instances can use ®ve types of constant renewable resources and 2 or 4 resources on average can be assigned to each activity. These assignments are constant throughout the duration of each activity. The Resource Factor has two levels: 0.4 and 0.8. Re-quirements of the resources are randomly gener-ated between 1 and 6.
We have carried out two replications for each one of the 222216 treatments (Number of Projects´Number of Activities per Pro-ject´Resource Overload´Resource Factor). In total, we have generated 32 multiprojects instances integrated by 192 single projects (Vives, 1995).
The analysis of each criterion has been carried out with the appropriate ANOVA, which consid-ers ®xed and random factors ± the multiproject factor is random. We have then analysed the re-sults through a mixed ANOVA with crossed and nested factors and ®xed and random eects with a signi®cance level of 5%. The ANOVA-Analysis of Variance-that is a powerful statistic tool used in Linear Regression Models and in Design of Ex-periments allows us to study the eect of several factors (multiproject characteristics) over the mean of the corresponding response variable.
5. Results of the computational experience
It would be very complex to analyse in the same computational experience for all the possibilities that the multicriteria heuristic method oers. Therefore, for each criterion we have analysed the eciency of the scheduling methods ± priority rules and project management software, with and without the application of the algorithms inte-grated into the multicriteria heuristic algorithm.
The multiproject instances described in Section 4 have been solved with the priority rules MAX-TWK and MINLFT, and four of the best-known and popular-priced project management software-CA-SuperProject v. 4.0 and Microsoft Project v.
4.0 with the single and multi-project approach, Project Scheduler 6 v. 1.5 and Time Line v. 6.0. These methods are used in the ®rst pass of the it-erative Forward±Backward pass when the objec-tive is to minimise a time criterion or to obtain a feasible multiproject schedule when the objective is to improve a no time criterion. Table 1 shows for each criterion, the mean initial feasible schedule, the standard deviation, the minimum and maxi-mum values for heuristics and project management software. Furthermore, the mean improved feasi-ble schedule after applying the improving heuris-tics, the mean amount of improvement and the mean CPU-time in seconds are also included.
As we can see in Figs. 4 and 5, results show the dierent eciency of the multicriteria heuristic method depending on the initial feasible multi-project schedule ± priority rules or multi-project man-agement software ± and the high eciency of the algorithms integrated into the multicriteria heu-ristic algorithm for resource-constrained multi-project scheduling in the objectives considered. In all the multiproject instances we have improved the initial feasible multiproject schedule and the degree of improvement depends on the initial schedule. In general, with the software Project Scheduler 6, the application of the algorithms de-veloped obtains the most important improve-ments.
5.1. Time criterion: Mean project delay and multi-project duration increase
On average, in two passes of the Iterative Forward±Backward Pass we obtain the largest improvement in a small computational time of a few seconds for hundreds of activities on a per-sonal computer with a Pentium processor and 100 MHz clock pulse (Table 1).
In Fig. 4(a) we can see that before the appli-cation of the iterative Forward±Backward pass the priority rule MAXTWK obtains on average the best results for the Mean Project Delay criterion. CA-SuperProject-MP, CA-SuperProject-SP, Pro-ject Scheduler 6, Time Line and MINLFT obtain a medium and signi®cantly dierent eciency, and Microsoft Project-MP and Microsoft Project-SP
present a signi®cantly worse performance. It is interesting to note that CA-SuperProject-MP has a better performance than CA-SuperProject-SP. This means that CA-SuperProject codes the solution problem in a dierent way depending on the multi-project approach or the single-project approach. It is not the same situation with Mi-crosoft Project-MP and MiMi-crosoft Project-SP that on average obtain a similar performance. This suggests that the two options that Microsoft Pro-ject incorporates are more geared toward activity organization than scheduling capabilities. Addi-tionally, the application of the iterative Forward± Backward pass reduces the dierences between the methods, being the iterative Forward±Backward pass with the priority rule MAXTWK the most ecient method.
In Fig. 4(b) we can see the eciency of the multiproject schedules with the Multiproject Du-ration Increase criterion. It is important to note that before the application of the iterative For-ward±Backward pass the priority rule MINLFT is the scheduling method that obtains the best per-formance. Regarding the project management software, again their dierent eciency is shown, Time Line being the most ecient project man-agement software. Project Scheduler 6 obtains the worst performance. With this criterion, the per-formance of CA-SuperProject and Microsoft Project is independent of the multi-project ap-proach or single-project apap-proach. Furthermore, after the application of the iterative Forward± Backward Pass there are project management software like Time Line that outperforms the heuristic algorithm based on priority rules. The iterative Forward±Backward pass with the priority rule MINLFT results the most ecient method.
Regarding the in¯uence of the remaining fac-tors considered in the design of experiment, for both time criteria analysed, the factors Number of Projects and Resource Factor are not signi®cant eects whereas the Factors Number of Activities and Overload are signi®cant eects. If the number of activities of the projects increase, then mean project delay increases and the multiproject dura-tion increase measured as a percentage decreases. The Overload Factor has a dierent behavior, if the amount of constraints over the resources
Table 1 Performa nce of sched uling metho ds and impro ving algo rithms M ean initial feasib le sch edule a Stan dard de viation M in M ax Mean improved feasible sched ule M ean amou nt of imp rovemen t Mean CPU-time (s) b Mean projec t delay (day s) MAXTW K 151.2 70.1 68 311 143.0 8.2 11.57 MINLF T 199.1 86.3 81 448 191.4 7.7 9.66 SuperPro ject-MP 194.1 85.3 82 421 177.0 17.1 11.97 SuperPro ject-SP 221.3 94.7 90 484 199.6 21.7 12.04 Microso ftProject-MP 254.2 115.5 100 565 200.3 53.9 12.32 Microso ftProject-SP 252.3 111.4 101 566 200.0 52.3 13.07 Project sched uler 6 218.5 105.1 94 461 151.7 66.8 15.01 Time line 209.6 90.5 86 457 192.8 16.8 10.47 Multipro ject duratio n (%) MAXTW K 254.7 94.5 94 456 224.0 26.2 13.15 MINLF T 205.7 81.1 69 357 195.5 10.2 6.61 SuperPro ject-MP 231.2 90.7 78 433 205.9 25.3 9.69 SuperPro ject-SP 226.4 91.2 74 418 202.7 23.7 8.59 Microso ftProject-MP 261.7 109.7 86 497 203.7 58.0 9.36 Microso ftProject-SP 258.6 107.4 82 470 203.7 54.9 8.88 Project sched uler 6 316.3 130.7 118 625 222.4 93.9 12.51 Time line 213.6 83.7 74 374 195.5 18.1 7.51 Project splittin g (day s) MAXTW K 85.47 43.1 26 194 63.62 21.85 4.21 MINLF T 105.8 59.6 28 293 89.81 15.99 4.20 SuperPro ject-MP 108.3 58.6 33 289 86.84 21.46 4.12 SuperPro ject-SP 124.2 66.3 33 316 95.40 28.80 5.14 Microso ftProject-MP 157.0 87.4 45 419 104.3 52.70 14.39 Microso ftProject-SP 154.6 84.6 47 421 104.7 49.90 12.64 Project sched uler 6 147.4 78.9 53 341 69.28 78.12 15.54 Time line 114.0 61.9 31 295 89.00 25.00 6.17
In-p rocess Invent ory (day s) M AXTWK 9.18 3.20 4 18 6.50 2.68 4.24 M INLFT 14.40 4.75 7 25 13.31 1.09 3.65 Supe rProject-MP 13.15 4.22 6 23 11.03 2.12 3.68 Supe rProject-SP 15.09 5.03 7 27 12.93 2.16 3.84 M icrosoftProje ct-MP 16.75 6.34 6 30 12.43 4.32 4.25 M icrosoftProje ct-SP 16.69 6.30 6 31 13.18 3.51 4.31 Pr oject Schedu ler 6 13.84 5.61 5 28 6.96 6.88 4.84 Time Line 14.46 5.67 7 24 12.28 2.18 4.43 Res ource Levelling ( E ( di )) M AXTWK 0.51 0.15 0.27 0.77 0.48 0.03 4.90 M INLFT 0.40 0.14 0.20 0.66 0.36 0.04 4.40 Supe rProject-MP 0.45 0.13 0.23 0.70 0.42 0.03 4.62 Supe rProject-SP 0.43 0.15 0.20 0.73 0.39 0.04 4.81 M icrosoftProje ct-MP 0.49 0.18 0.22 0.81 0.44 0.05 5.43 M icrosoftProje ct-SP 0.48 0.16 0.23 0.81 0.43 0.05 5.59 Pr oject schedu ler 6 0.58 0.16 0.36 0.86 0.53 0.05 7.56 Time line 0.42 0.14 0.21 0.69 0.37 0.05 5.34 Idle resou rces (max %) M AXTWK 43.59 10.88 24 62 42.25 1.34 6.34 M INLFT 38.84 10.64 18 61 36.56 2.28 5.75 Supe rProject-MP 42.06 10.23 20 59 39.41 2.65 6.06 Supe rProject-SP 42.06 10.58 22 64 38.37 3.69 5.78 M icrosoftProje ct-MP 46.12 10.14 27 66 39.37 6.75 6.56 M icrosoftProje ct-SP 45.91 10.54 25 66 39.31 6.60 6.59 Pr oject schedu ler 6 51.09 9.63 32 70 43.47 7.62 7.71 Time line 40.28 10.19 21 60 36.75 3.53 6.93 a3 C PU-time second s on ave rage. b For mult iprojects with 300 activ ities on ave rage.
increases, mean project delay and multiproject duration are increased. When the time criterion of a schedule increases, the iterative Forward±Back-ward Pass increases its eciency.
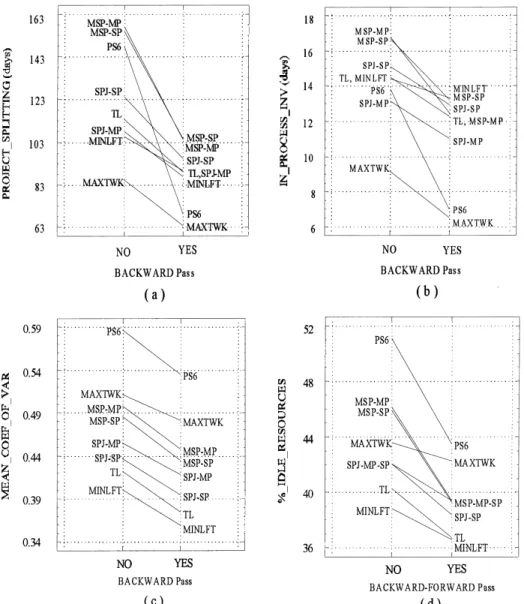
5.2. No time criterion: Project splitting, in-process inventory, resource levelling and idle resources
In Fig. 5(a),Project splittingis analysed, and we can see that before the application of the Back-ward Pass, the priority rule MAXTWK is the most ecient. MP, CA-SuperProject-SP, Time Line and MINLFT obtain a medium and dierent eciency, and Project Scheduler 6, Mi-crosoft Project-MP and MiMi-crosoft Project-SP oer the worst results. After the application of the Backward Pass, with the priority rule MAXTWK the best eciency is obtained. The performance with the dierent levels of the factors Number of Projects and Resource Factor do not have signif-icant dierences. Nevertheless, the factors Number of Activities and Resource Overload have signi®-cant eects, so if the level of these factors in-creases, the level of project splitting also increases. The eciency of the multiproject scheduling measured by theIn-process inventorycan be shown in Fig. 5(b). We can see that before applying the Backward Pass, the priority rule MAXTWK is the
method that obtains the best eciency. CA-Su-perProject-MP, CA-SuperProject-SP, Project Scheduler 6, Time Line and MINLFT obtain a medium and dierent eciency, and Microsoft Project-MP and Microsoft Project-SP obtain the worst performance. After applying the Backward Pass, again and as in the previous criterion, with the priority rule MAXTWK the best eciency is obtained. Additionally, factors Number of Pro-jects, Number of Activities and Resource Factor have no signi®cant eect and the levels of the Overload Factor have dierent eciency in the sense that when the resource constraints arehigher, in-process inventory is also increased.
As we have described in previous sections, Re-source Levelling is measured in this work by the Mean Coecient of Variation. Fig. 5(c) shows the means plot of the dierent methods. Regarding this response variable, the priority rule MINLFT obtains the best results. In this case the mean order is the same before and after the application of the feasible schedule improving algorithm ± Backward Pass. The software Time Line obtains the highest eciency of the project management software. Factors Number of Activities, Number of Projects, Resources Factor and Overload have signi®cant eects. If the level of the factors Number of Ac-tivities, Number of Projects and Resource Factor increases, the histogram will be more leveled and if Fig. 4. Performance in multiproject scheduling. Means plot for time criteria: (a) mean project delay and (b) multiproject duration increase.
the level of the Overload increases the multiproject schedule obtains more unleveled histograms. Ad-ditionally, when the level of the Resource Factor is low, the Backward Pass is more ecient.
Idle Resourcesare analysed in Fig. 5(d) in which we can see that the priority rule MINLFT is the method that obtains the best performance. When the multiproject schedules obtained by Time Line are improved with the Backward±Forward Pass, the new schedules obtain a performance similar to
those obtained with MINLFT. The Resource Overload Factor has no signi®cant eect. Never-theless, the factors Number of Projects and Re-source Factor have a signi®cant eect in the sense that when the level of these factors increases, idle resources decrease.
In general, improvements with no time criteria can be greater if before applying the corresponding feasible schedule improvement algorithm, the ®rst phase of the multicriteria heuristic algorithm Fig. 5. Performance in multiproject scheduling. Means plot for no time criteria: (a) project splitting, (b) in-process inventory, (c) mean coecient of variation (resource levelling) and (d) idle resource.
proposed is applied. Finally, we can say that pro-ject management software needs to make an eort to obtain an eciency close to the heuristics based on priority rules and the multicriteria heuristic algorithm designed can be helpful for this purpose.
6. Conclusions and future works
In order to add ¯exibility in using project scheduling tools, we have developed a multicriteria heuristic algorithm taking into account aspects such as time ± mean project delay or multiproject duration increase ± as well as project splitting, in-process inventory, resource levelling or idle re-sources. With this approach, the practitioner can choose the most interesting time and not time objective for him.
The heuristic multicriteria algorithm consists of several algorithms based on the improvement of feasible schedules. These algorithms, that are based on the concepts of FFS and BFS of the activities, can be easily coded into a project scheduling software tool and they signi®cantly improve the initial feasible multiproject schedule
obtained from heuristic methods based on priority rules as well as project management software. Concretely, as we can see in Table 2, in our com-putational study, on the one hand, the rule MAXTWK ± with a multiproject approach ± and the software Project Scheduler 6 with the appli-cation of the corresponding feasible schedule im-proving algorithm results the most ecient method for the criteria Mean project delay, Project splitting and In-process inventory. On the other hand, the rule MINLFT ± with a single-project approach ± and the software Time Line with the application of the corresponding feasible schedule improving algorithm, result the most ecient methods for the criteria Multiproject Duration Increase, Resource Levelling and Idle Resources. These ®nal activity schedules can be again manu-ally adapted to the particular needs of the practi-tioners with the concepts of FFS and BFS.
Additionally, in the ®rst phase of the multicri-teria algorithm and for time crimulticri-teria, the multi-project schedule can be improved again. This new improvement (that we can consider in future works) can consist of additional Forward±Back-ward pass iterations where activities from the Table 2
Best methods and ranking of performance for heuristics and project management software before and after applying the improving algorithms
Criteria Heuristics and project management software Application of the improving algorithms
Best method Rankinga Best method Rankinga
Mean project
dealy MAXTWK SPJ-MP > MINLFT> TL > PS6,
SPJ-SP > MSP-SP, MSP-MP
MAXTWK PS6 > SPJ-MP > MINLFT-MP,
TL > SPJ-SP , MSP-SP, MSP-MP
Multiproject
duration MINLFT TL > SPJ-SP, SPJ-MP >MAXTWK > MSP-SP,
MSP-MP > PS6
MINLFT
Time line SPJ-SP, MSP-SP, MSP-MP,SPJ-MP > PS6, MAXTWK
Project splitting MAXTWK MINLFT, SPJ-MP > TL >
SPJ-SP > PS6 > MSP-SP, MSP-MP
MAXTWK PS6 > SPJ-MP, TL, MINLFT >
SPJ-SP > MSP-MP, MSP-SP In-process
Inventory MAXTWK SPJ-MP > PS6 > TL,MINLFT > SPJ-SP > MSP-SP,
MSP-MP MAXTWK PS6 > SPJ-MP > TL, MSP-MP > SPJ-SP, MSP-SP > MINLFT Resource levelling MINLFT TL > SPJ-SP > SPJ-MP >MSP-SP > MSP-MP > MAXTWK > PS6 MINLFT TL > SPJ-SP > SPJ-MP, MSP-SP > MSP-MP > MAXTWK > PS6
Idle resources MINLFT TL > SPJ-MP, SPJ-SP >
MAXTWK > MSP-SP, MSP-MP > PS6
MINLFT
Time line SPJ-SP > MSP-SP, MSP-MP,SPJ-MP > MAXTWK > PS6
sortedactivity listcan be shifted or not shifted with a random decision. That is, the scheduled dates can change or not change. In this way, the free slacks of the activities change and new improve-ments are possible.
Furthermore and in the context of project controlling, when the inevitable activity delay oc-curs during the execution of the projects, the project manager must often reschedule the re-source constrained projects to determine new ac-tivity start and ®nish times (Willis, 1985). So, there is clearly a need for information and what-if analysis tools that allow the project manager to control projects easier. FFS and BFS concepts de®ned in this work are very useful for this pur-pose and can be eciently included into Decision Support Systems tools integrated into standard project management software like Microsoft Pro-ject, CA-SuperProject or Time Line. This standard software have a programming language to code these new features and Forward±Backward itera-tive procedures.
Finally, it is interesting to note that this algo-rithm is open in the sense that it can be adapted to include new objectives related to the particular needs of companies and it oers ¯exibility to practitioners when they schedule and control projects.
Acknowledgements
We would like to thank the referees for their helpful comments and suggestions on an earlier version of this paper, the Generalitat Valenciana for its support with the Programa de Proyectos de Investigacion Cient õ®ca y Desarrollo Tecnologico,
GV-2216/94 and GV97-TI-05-35, and ®nally the Instituto de la Mediana y Peque~na Industria Val-enciana (IMPIVA) for its help in the survey car-ried out in the Valencian Region-Spain.
References
Alvarez-Valdes, A., Tamarit, J.M., 1989. Heuristic algorithms for resource constrained project scheduling: A review and
an empirical analysis. In: Slowinski, R., Weßglarz, J. (Eds.),
Advances in Project Scheduling. Elsevier, Amsterdam, pp. 113±134.
Baker, K.R., Introduction to Sequencing and Scheduling, Wiley, New York.
Bock, D.B., Patterson, J.H., 1990. A comparison of due date setting resource assignment and job preemption heuristics for the multiproject scheduling problem. Decision Sciences 21, 387±402.
Boctor, F.F., 1990. Some ecient multi-heuristic procedures for resource constrained project scheduling. European Journal of Operational Research 49, 3±13.
Burges, A.R., Killebrew, J.B., 1962. Variation in activity level on a cyclic arrow diagram. Journal of Industrial Engineer-ing 13, 76±83.
Cooper, D.F., 1976. Heuristics for scheduling resource con-strained scheduling projects: An experimental investigation. Management Science 22, 1186±1194.
Davis, E.W., Patterson, J.H., 1975. A comparison of heuristics and optimum solutions in resource constrained project scheduling. Management Science 21, 944±955.
Dumond, J., Mabert, V.A., 1988. Evaluating project scheduling and due date assignment procedures: An experimental analysis. Management Science 34, 101±118.
Fendley, L.G., 1968. Towards the Development of a Complete Multiproject Scheduling System. Journal of Industrial Engineering, 505±515.
Kolisch, R., 1996. Serial and parallel resource-constrained project scheduling methods revisited: Theory and computa-tion. European Journal of Operational Research 90 (2), 320±333.
Kolisch, R., Hartmann, S., 1998. Heuristic algorithms for the resource-constrained project scheduling problem: Classi®-cation and computational analysis. In: Weglarz, J. (Ed.), Project Scheduling: Recent Models, Algorithms and Appli-cations. Kluwer Academic Publishers, Amsterdam, pp. 147± 178.
Kurtulus, I.S., Davis, E.W., 1982. Multi-project scheduling: Categorization of heuristic rules performance. Management Science 28 (2), 161±172.
Kurtulus, I.S., Narula, S.C., 1985. Multi-project scheduling: Analysis of project performance. IIE Transactions 17 (1), 58±66.
Lawrence, S.R., Morton, T.E., 1993. Resource-constrained multi-project scheduling with tardy costs: Comparing my-opic bottleneck and resource pricing heuristics. European Journal of Operational Research 64, 168±187.
Levy, F.K., Thompson, G.L., Wiest, J.D., 1963. Multiship multishop workload smoothing program. Naval Research Logistics Quarterly 9, 37±44.
Li, K.Y., Willis, R.J., 1992. An iterative scheduling technique for resource-constrained project scheduling. European Journal of Operational Research 56, 370±379.
Lova, A., 1997. Programacion de multiproyectos con recursos
limitados: un enfoque multicriterio. Unpublished Ph. D.
Dissertation, Universidad Politecnica de Valencia.
Maroto, C., Lova, A., Alcaraz, J., Tormos, P., 1997. Resource allocation in single, multiple projects: algorithms and
professional software, XV EURO and XXXIV INFORMS Joint International Meeting: OR/MS for the New Millen-nium, 14±17 July, Barcelona (Spain).
Maroto, C., Tormos, P., Lova, A., 1998. The evolution of
software quality in project scheduling. In: Weßglarz, J. (Ed.),
Project Scheduling: Recent Models, Algorithms and Appli-cations. Kluwer Academic Publishers, Amsterdam, pp. 239± 259.
Maroto, C., Tormos, P., Lova, A., Crespo, F., 1996. Profes-sional Software for resource constrained scheduling: heu-ristic and exact methods, Fifth international workshop on project management and scheduling, 11±13 April, Poznan (Poland), Scienti®c Publishers OWN PAN, pp. 163±166.
Ozdamar, L., Ulusoy, G., 1995. A survey on the resource-constrained project scheduling problem. IIE Transactions 27, 574±586.
Ozdamar, L., Ulusoy, G., 1996. A note on an iterative forward/ backward scheduling technique with reference to a proce-dure by Li and Willis. European Journal of Operational Research 89, 400±407.
Payne, J.H., 1995. Management of multiple simultaneous projects: A state-of-the-art review. International Journal of Project Management 13, 163±168.
Sprecher, A., 1994. Resource-Constrained Project Scheduling. Springer, Berlin.
Sprecher, A., Kolish, R., Drexl, A., 1995. Semi-active, active and non-delay schedule for the resource-constrained project
scheduling problem. European Journal of Operational Research 80, 94±102.
Tsubakitani, S., Deckro, R.F., 1990. A heuristic for multi-project scheduling with limited resources in the housing industry. European Journal of Operational Research 49, 80±91.
Vives Casino, E., 1995. Modelizacion de grafos para Gestion de
Proyectos, Proyecto Fin de Carrera, Facultad de
In-formatica, Universidad Politecnica de Valencia.
Wiest, J.D., 1963. The Scheduling of Large Projects with Limited Resources, Ph.D. Thesis, Carnegie Institute of Technology.
Wiest, J.D., 1964. Some properties of schedules for large projects with limited resources. Operations Research 12, 395±418. Wiest, J.D., 1967. A heuristic model for scheduling large
projects with limited resources. Management Science 13, B359±B377.
Wiley, V.D., Deckro, R.F., Jackson Jr., J.A., 1998. Optimiza-tion analysis for design and planning of multi-project programs. European Journal of Operational Research 107, 492±506.
Willis, R.J., 1985. Critical path analysis and resource con-strained project scheduling ± Theory and practice. European Journal of Operational Research 21, 149±155.
Woodworth, B.M., Willie, C.J., 1975. A heuristic algorithm for resource leveling in multi-project multi-resource scheduling. Decision Sciences 6, 525±540.