2016 Joint International Conference on Artificial Intelligence and Computer Engineering (AICE 2016) and International Conference on Network and Communication Security (NCS 2016)
ISBN: 978-1-60595-362-5
Direct Position Determination Algorithm Based on Multi-array in the
Presence of Gain-phase Errors
Jun HONG
a, Zhi-Ying HUANG
b*, Zhi LI, Jia YANG
Luoyang Electronic Equipment Test Center, Luoyang, Henan 471003, China
a[email protected], b[email protected]
*Corresponding author
Keywords: Passive Localization, Multi-array, Direct Position Determination, Gain-phase Error.
Abstract. In order to solve the problem of accuracy decrease of Direct Position Determination (DPD) in the presence of gain-phase error, the effect of the gain-phase error to the DPD algorithm is analyzed and an improved DPD algorithm with gain-phase error is introduced. In this algorithm, the gain-phase errors and the position of the targets are co-estimated simultaneously with iteration, which reduce the effect of the gain-phase errors. Simulation result shows that the improved algorithm has higher accuracy than the DPD algorithm without correction.
Introduction
Localization using passive sensor arrays has been encountered in many fields, such as wireless communication, radar and sonar. To determine the target position, traditional multi-station localization systems need two steps: first the DOA (direction of arrival), TDOA (time difference of arrival) or FDOA (frequency of arrival) of the narrowband signal are estimated by each station, which are then transmitted to the fusion center; the estimated results are then used to estimate the target position[1]. These algorithms perform well in good signal noise ratio (SNR) situation, but the drawbacks are significant. Each station estimates the DOA/TDOA/FDOA separately, for which the inherent constraint that all intercepted signals correspond to the same source is ignored. Simultaneously, the rest of the data is abandoned after parameter estimation, while the weak signals drowned in the noise could be abandoned.
To solve these problems, Anthony J. Weiss proposed a one-step direct position determination (DPD) algorithm [1-3]. Using the same observation model of the tradition two-step system, instead of estimating parameters such as DOA, TDOA before target position localization, this method uses the original array data to directly estimate the target position. DPD performs better than 2-steps way in low SNR. Moreover, the position accuracy approaches the CRLB when the values of SNR are high. According to the data processing methods, these algorithms can be divided into 2 kinds: frequency-domain data DPD (FDPD) and time-domain data DPD (TDPD). The accuracy of FDPD is highest in all DPD method, but in over-the-horizon (OTH) model FDPD fails [4-6]; the accuracy of TDPD, which can be used in OTH model, is a little lower than FDPD, but still higher than the 2-steps way [7].
error is proposed. Simulation result shows that the MBSC-FDPD algorithm has higher accuracy than the classical FDPD algorithm when the array channel gain-phase error exists.
System model
Consider a bearings-only localization system composed of N base station and each station is equipped with an antenna array consisting of M elements. All the stations are time synchronized by GPS. An emitter locates p in the horizon range, which transmits narrow band signal in the far field of the antenna arrays. Denote the position of the nth(n=1, … , N) array qn, and the signal received by the
nth array can be presented as:
0
( ) ( ) ( ( ) ) ( )
n t bn n s t
n t n tr a p p w (1)
where rn( )t is the observed M1 output array in the time of t, bn is the unknown complex
channel attenuation, a pn( ) is the nth array response to the signal transmitted from position p.
0
( n( ) )
s t
p t is the signal waveform, delayed by
n( )p and generated at time t0, wn( )t is thecomplex envelope of the noise.
The sample version in Eq.1 is given by:
, ,
0
,
,
( ) 0 1
( ( ) ) |
( ) | ( ) |
n k n n k n k
k n t kT
n k n t kT
n k n t kT
b k K
t t
t t
r a p s w
s s p
r r
w w
(2)
where K is the sampling number.
In actual use the gain-phase error exists, which can be described as a direction independent gain-phase error vector = 1 2
n
T i M
Ψ , where j m( 1, 2,... )
m g em m Mn
is the
gain-phase disturbance in the mth channel, gm is the gain error and
m is the phase error. Thus,when gain-phase errors exist in the channels, the array response can be described as [2]:
( ) ( )
n n n
a p Γ a p (3)
where Γn diag(Ψn) and Eq.2 can be represented as
, ( ) , 0 1
n k bn n sk n k k K
r a p w (4)
MBS-DPD Approach
The classical FDPD algorithm[1-2] A.J Weiss proposed is essentially a Maximum Likelihood (ML) estimator to the target position based on the original array output data. To separate the transmission delay and time in the signal waveform, taking the discrete Fourier transform (DFT) of Eq.2 we get
[ ( ) ]
( ) ( ) ( ) ( )
2
,0 1
k n
j t
n n n n
k
k b p k e k
k
k K KT
p
r a s w
(5)
0
2 1
[ ( ) ]
1 0
( ) ( ) ( ) ( ) k n
N K
j t
n n n n k
Q k b k e
pp r a p s (6)
Where stands for the Frobenius norm. Eq.6 can be represented as
0 1 2 1 [ ( ) ] 0 ( ) ( )
( ) ( ) ( ) ( ) k n
N n n K
j t n n n
k
Q Q
Q k b k e
p p pp r a p s
(7)
Define the following vectors
0[ ( ) 0] 1[ ( ) 0]
(0), (1),..., ( 1)
(0) ,..., ( 1)
( )
n K n
T
T T T
n n n n
T
j t j t
T T
n n n
n n n
K
e K e
p p
r r r r
s s s
c s a p
(8)
Where stands for the Kronecker product. Performing similar calculations analog to [2], we can get simpler cost function
0 0 1 0
1
( )
ˆ ( ) ( )
[ (0) ,..., ( 1) ];
[ (0),..., ( 1)] ;
( ) ( ) ( ).
K
k n
N
H H H
n n n
j t j t
T
n n n
j H
n n n
Q
e K e
d d K
d k e k
pp s d d s s Ds
s s s
d
a p r
(9)
Under the common assumption that the signal waveform is not known to the receivers, the cost function in Eq.9 is maximized by selecting the vector as the eigenvector corresponding to the largest eigenvalue of the matrix. Hence, Eq.9 reduces to [2]
max
ˆ ( )ML ( )
Q p
D (10)Consider the gain-phase errors, follow the method of MUSIC based self-correlation method in [2]. The optimization problem of self-correlation DPD can be solved by Eq.11:
, 1
ˆ ˆ
{ , }=arg min ( ) ( ), 1,..., n n
n
M
H H H
n n n N N n n
m n N
Γ pΓ p a p Γ U U Γ a p (11) According to matrix equality
( ) diag[ ( )]vec( ) ( )
n n n n n n
Γ a p a p Γ α p γ (12) When the kth estimation of the target positon pˆ( )k is obtained, the estimation of ˆ(k 1)
n
Γ can be calculated as:
1 ( )
( 1)
1 ( )
1 ( ) ( ) ( )
1
( 1) ( 1)
ˆ ( ) ˆ
ˆ ( )
ˆ ˆ ˆ
( ) ( ) ( )
1 0 0 0
ˆ diag(ˆ )
n n
k
k n
n T k
n
M
k H k H k
n n N N n
m T M k k n n
Ω p χ
γ
χ Ω p χ
Ω p α p U U α p
χ
Γ γ
When ˆ( )k n
Γ is estimated, Eq.3 turns into:
( )
ˆ ( ) ˆ k ( ) n n n
[image:4.612.167.449.585.709.2]a p Γ a p (14) Under the condition of array gain-phase error existing, Eq.5 can be represented as:
[ ( ) ]
, ˆ ( ) ,
2
,0 1
k n j t n k n n k n k
k
b e
k
k K KT
p
r a p s w
(15)
And Eq.9 turns into:
0 0 1 0
1
0 1
,0 , 1 ( )
, ,
( ) ( )
[ ,..., ];
[ ,..., ] ; ˆ ( )
K
k n
N
H H H
n n n
j t j t
K
T
n n n K
j H
n k n n k
Q
e e
d d
d e
p
p s d d s s Ds
s s s
d
a p r
(16)
And pˆ( )k can be estimated by Eq.17:
( ) max
ˆ ˆ( k ) ( )
Q p D (17) In summary, the MBSC-FDPD algorithm is given by the following iterative procedure:
1) Set ˆΓ IM.
2) Find the estimation of pˆ by Eq.17 with ˆΓ.
3) Using the so-obtained pˆ, compute ˆγ by Eq.13 and find the refined ˆΓ. Repeat Eq.2 and Eq.3 a few times to obtain the final estimation of pˆ.
Simulations
In order to examine the performance of the advocated method and compare it with the traditional approaches, we performed extensive Monte Carlo simulations. Consider four based station placed at (0, 80), (150, 0), (0, 200), (100, 300) and one target emitting narrow-band signal at (100,300)
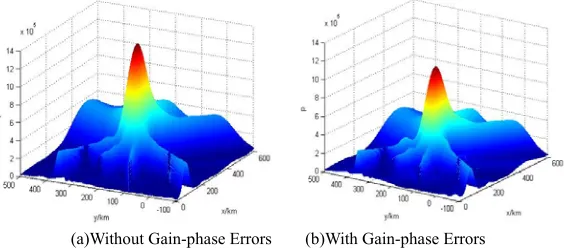
Each base station is equipped with a linear array of nine antenna elements. Each location determination is based on 64 samples of the signal. The SNR is 5dB. Compare the localization performance between the conditions of gain-phase errors existing and not existing, the cost function values calculated by Eq.15 in the monitoring area is displayed in Fig.1. In Fig. 1(b), the gain error is 4dB and the phase error is 30°. We can see that in the presence of gain-phase errors, the peak near the target is lower, which results in the decline of accuracy.
(a)Without Gain-phase Errors (b)With Gain-phase Errors
Compare the performance of MBSC-FDPD and the traditional method, set the gain errors for different stations as 4dB, 3dB, 2dB and 1dB, and the phase errors as 15°,15°, 5°and 5°, and we get the cost function as Fig.2. After self-correlation, the peaks of MBSC-FDPD becomes sharper.
[image:5.612.152.462.121.253.2](a)Traditional FDPD (b)MBSC-FDPD
Figure 2. Cost Function Comparation between Traditional FDPD and MBSC-FDPD.
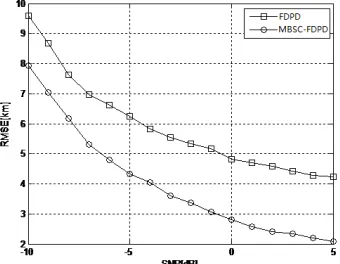
Use the same simulation condition in Fig.2, the SNR is varied between -10dB and 5dB, at each SNR value, we performed 500 experiments in order to obtain the statistical properties of the performance. The root mean square error (RMSE) shown in Fig. 3 reveals that the MBSC-FDPD estimator performs better than the traditional FDPD. The better the SNR is, the more improvement of MBSC-FDPD can be reached.
Figure 3. RMSE in Different SNR.
Summary
In this paper, we first present the FDPD localization model in the presence of gain-phase errors. We have proposed a MBSC-FDPD algorithm to improve the localization accuracy under this model, which uses an iteration way to estimate the gain-phase error and target position simultaneously. With the price of more calculation account, the accuracy of localization is improved.
References
[1]Antony J. Weiss. Direct position determination of narrowband radio frequency transmitters [J]. IEEE Signal Processing Letters, 2004, 11(5): 513-516.
[image:5.612.219.389.359.491.2][3]Weiss A.J., Amar A. Direct position determination of multiple radio signals [C]// 2004 IEEE International Conference on Acoustics, Speech, and Signal Processing. Quebec, Canada: [s.n.], 2004: 17-21.
[4]Amar A., Weiss A.J. Analysis of direct position determination approach in the presence of model errors [C]// IEEE Statistical Signal Processing. Novosibirsk, Russia:[s.n.], 2005: 521-524.
[5]Demissie B., Oispuu M., Ruthotto E. Localization of multiple sources with a moving array using subspace data fusion [C]// 11th International Conference on Information Fusion. Piscataway, USA: [s.n.], 2008: 1-7.
[6]Oispuu M., Nickel U. Direct detection and position determination of multiple sources with intermittent emission [J]. Signal Processing, 2010, 90: 3056-3064.
[7]Zhang Min, Guo Fucheng, Zhou Yiyu. A single moving observer direct position determination method using a long baseline interferometer [J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(2): 378-386.