A New Way to Model
Current-Mode Control
Unified models using general gain parameters
provide the solution for any peak- or
valley-derived current-mode converter.
By Robert Sheehan
, Principal Applications Engineer,
National Semiconductor, Santa Clara, Calif.
I
n Part I of this article (Power Electronics Technology, May 2007), the basic operation of current-mode control was broken down into its component parts, allowing a greater intuitive understanding for the practical de-signer. A comparison of the modulator gain was made to voltage-mode operation, and a simple analogy showed how the optimal slope-compensation requirement could be obtained without any complicated equations.Now unifi ed models using general gain parameters are introduced, along with simplifi ed design equations, and an in-depth treatment of the analysis and theory is presented. This general modeling technique explains how previous models can complement each other on various aspects of the current-mode-control theory.
Modeling Continuous-Conduction Mode
This article provides models and solutions for fi
xed-frequency, continuous-conduction-mode (CCM) opera-tion. Reference [1] covers the theoretical background for this subject, providing an exhaustive analysis of the buck regulator with its associated models and results. To prevent duplication, the boost regulator of Fig. 1 forms the basis for the discussion here. A more rapid approach to using this information is to bypass reference [1] and follow the general guidelines for slope compensation described in the fi rst part of this article. Then the simplifi ed equations can be used to determine the frequency response.
A current-mode switching regulator is a sampled-data system, the bandwidth of which is limited by the switching frequency. Beyond half the switching frequency, the response of the inductor current to a change in control voltage is not accurately reproduced. To quantify this effect for linear modeling, the continuous-time model of reference [2] suc-cessfully placed the sampling-gain term in the closed-current
Part Two
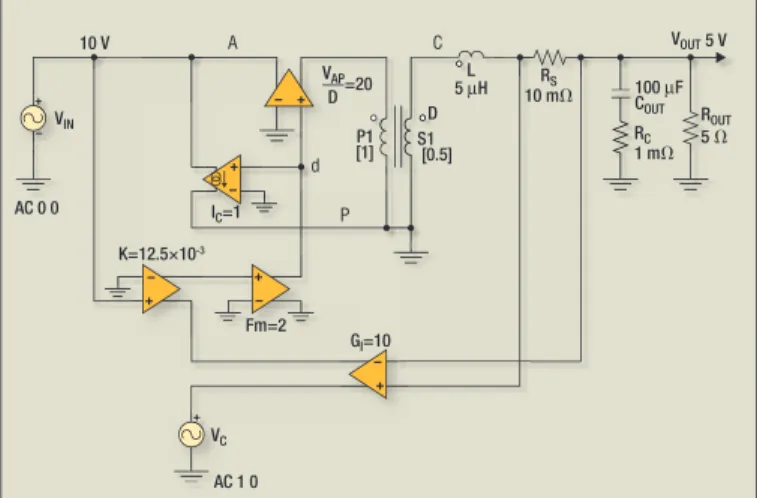
��� ��� ����� ������ �������� � ���� ���� ������ �� �� � �� �� �� � �� � ������ � � ������� ��� ��� �� ����� ��������� ����������� ������� ���� ������������ ����������� ���������� ������������� ��������������� �������� ���������� ������������� ��������������� �������� ���������� ������������� ��������������� ����������� �� ������ � ����Fig. 1. This switching model of a boost regulator topology provides an example for modeling and simulating continuous-conduction-mode operation.
feedback loop. This allows accurate modeling of the control-to-output transfer function using the term HE(s).
To accurately model the current loop, the unifi ed model of reference [3] placed the sampling-gain term in the forward path. For peak or valley current modes with a fi xed slope-compensation ramp, this also accurately models the control-to-output transfer function using the term FM(s).
To develop the theory for emulated current-mode control, reference [1] used a fresh approach, deriving general gain parameters, which are consistent with both models. In addi-tion, a new representation of the sampling-gain term for the closed-current loop was developed, identifying limitations of the forward-path sampling-gain term.
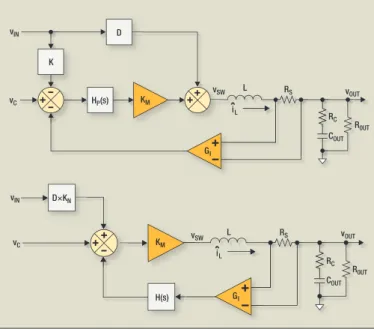
The upper circuit in Fig. 2 represents the unifi ed form of the model, with K being the feed-forward term. In the lower circuit, KN is the dc audio susceptibility coeffi cient from the continuous-time model. The linear model sampling-gain terms, as shown in Fig. 2, are defi ned as:
H s s Q H s s T P H sP H s N E N N ( ) H s( ) H s = H sH s( )( ) (((s Ks KEE))) , + ×s + ×s + × + × + × + × + × + × + × + × + × = + ×((((((s Ks Ks Ks K××× EEEE))))))++++ = 1 1 1 = +1 = + 22 ω ω ω π , and
where T is the switching period. The term KE is new and emerged from the derivation of the closed-loop expression for H(s). This derivation used slope-compensation terms other than the classic fi xed ramp for peak or valley current mode. KE can be expressed as 1
other than the classic fi xed ramp for peak or valley current 1
other than the classic fi xed ramp for peak or valley current ωNNNNN××QQEEEEE
,
but this serves no purpose, because QE would need a value of infi nity for the condition KE = 0. To date, no method has been found which successfully incorporates KE into the open-loop expression for HP(s). Use of HP(s) is limited to peak or valley current mode with a fi xed slope-compensating ramp, for which the value of KE = 0.
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
To place either sampling-gain term into the linear models for the buck, boost and buck-boost, the following relation-ships are applied: FM(s) = FM × HP(s) and GI(s) = GI × H(s). The accuracy limit for the sampling-gain term is identifi ed by comparing Q to the modulator voltage gain KM and the feed-forward term K. Q is directly related to the slope-com-pensation requirement. The derivation starts with the ideal steady-state modulator gain, the physical reason being that at the switching frequency, the relative slopes are fi xed with respect to the period T. A change in control voltage is then related to a change in average inductor current. Any trans-fer function that is solely dependent on KM in the forward dc-gain path will have excellent agreement to the switching model up to half the switching frequency. However, any transfer function that includes K in the forward dc-gain path will show some deviation at half the switching frequency.
Simplifi ed Transfer Functions
No assumptions for simplifi cation were made during the derivation of the transfer functions. The only initial assumptions are the ones generally accepted to be valid in a fi rst-order analysis. Voltage sources, current sources and switches are ideal, with no delays in the control circuit. Amplifi er inputs are high impedance, with no signifi cant loading of the previous stage. Simplifi cation of the results was made after the complete derivation, which included all terms. Reference [1] has examples for the buck regulator.
To show the factored form, the simplifi ed transfer func-tions assume that the poles are well separated by the current-loop gain. Expressions for the low-frequency model do not show the additional phase shift due to the sampling effect. The control-to-output transfer function with the sampling-gain term accurately represents the circuit’s behavior up to half the switching frequency. The line-to-output expressions for audio susceptibility are accurate at dc, but diverge from the actual response as frequency increases.
The current-sense gain is defi ned as RI = GI × RS, where GI is the current-sense amplifi er and RS is the sense resistor. For all transfer functions,
ω ω ωZ ω ωZ ω ω ω OUT C L M I COU R COUT RC C T RC KM RI KM RI L ω = ω ω ω C ×R C T RC C TT×RCC C T RC =KKKKMMMM××RRRRIIII 1 and ω and ω ω ω .
To include the sampling-gain term in the control to out-put transfer function, the term
1+ s L ω is replaced with 1 2 2 + × + s Q s N N ω ω in the low-frequency equations. This represents the closed-current-loop sampling-gain term. Inclusion of this term in the line-to-output equations will not produce the same accuracy of results. For peak or valley current mode with a fi xed slope-compensating ramp,ωωωωωωωωωωωωωωωωωωωωωωωωωLLLLLLLLLLLL= ×= ×= ×= ×= ×= ×QQQQQQQQQ ωωωωωωωωωωωωωωωωωωωωωωωωωNNNNNNNNNNNN.
Sampling Gain Q
Using a value of Q = 0.637 will cause any tendency toward sub-harmonic oscillation to damp in one switching cycle. With respect to the closed-current-loop control-to-output ��� �� ��� ���� �� �� �� �� ����� � � � ���� ���� �� ��� �� ��� ���� �� �� �� �� ���� � ���� ���� ���� ��
Fig. 2. For a buck regulator, sampling gain HP(s) is placed in the forward path (upper circuit), and sampling gain H(s) is placed in the closed-current feedback loop path (lower circuit).
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
function, the effective sampled-gain inductor pole is given by: f Q T Q Q L f QL f Q( ) f Q( ) f Q = (( (( ) ) × ×T Q × ×T Q×××(((( +++(((( ×××Q )Q )−−− )) 1 4 ××(((((( 111++((((((444 )) 1)) 2 × 2 − × − .
This is the frequency at which a 45-degree phase shift occurs because of the sampling gain. For Q = 0.637, fL occurs because of the sampling gain. For Q = 0.637, fL occurs because of the sampling gain. For Q = 0.637, f (Q) occurs at 24% of the switching frequency. For Q = 1, fL occurs at 24% of the switching frequency. For Q = 1, fL occurs at 24% of the switching frequency. For Q = 1, f (Q) occurs at 31% of the switching frequency. For second-order systems, the condition of Q = 1 is normally associated with best transient response. The criteria for critical damping
is Q = 0.5 (δ = 1). Using Q = 1 may make an incremental difference for the buck, but is inconsequential for the boost and buck-boost with the associated right-half-plane zero of ωR. For the peak-current-mode buck with a fi xed slope-com-pensating ramp, the effective sampled-gain inductor pole is only fi xed in frequency with respect to changes in line voltage when Q = 0.637. Proportional slope-compensation methods will achieve this for other operating modes.
To determine the effect of reducing the slope compensa-tion to increase the voltage-loop bandwidth, an
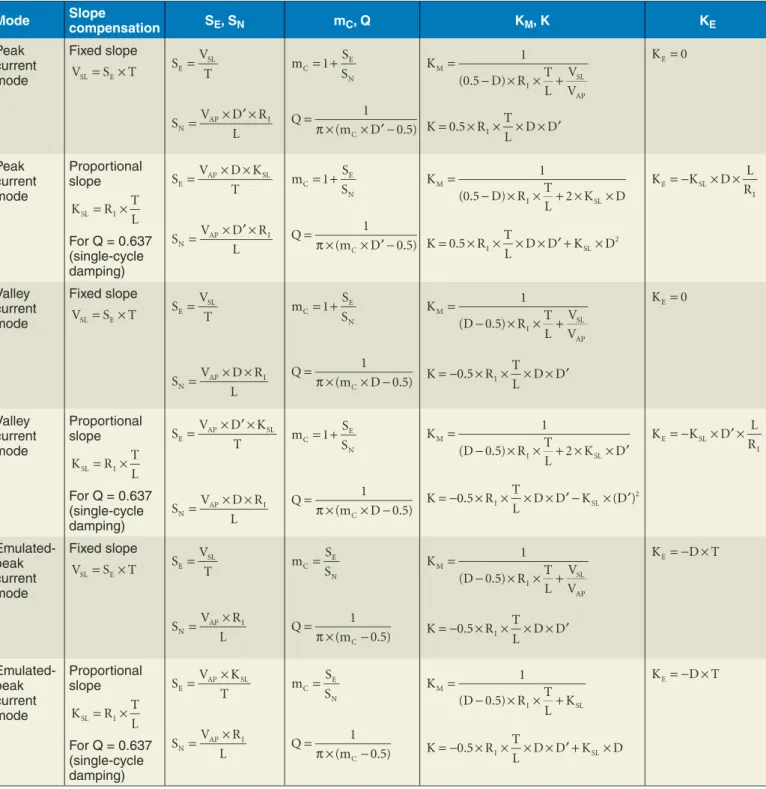
emulated-Mode Slopecompensation SE, SN mC, Q KM, K KE
Peak current mode Fixed slope VSL S T VSL S V =SE× V =S × V =SEE× S V T E SL VSL V = S V D R L N AP VAP D V D I =VV ×DD′ × m S S C E N = +1 = +1 = + Q C = × × ′ 1 0 5 π××××××((((((((((mmmmmmmmmmmmmmmmmmCCCCCCCC××××××DDDDDDDDDDDDDDDDDD′′ −−0 50 5)... K D R T L V V M I SL VSL V AP VAP V = D R −D ×R −D ×R −D ×R × +× + 1 0 5 ( .0 5 ( .0 5−−DDDDDDDD)))))××RRRRRRRR K R T L D D I K= ×R K 0 5 R × ×× ×D DD D× ′ K 0 5 R K R K= ×R K 0 5 R K= ×R K 0 50 5. R K 0 5 R K . R K 0 5 R K R K= ×R K 0 5 R K= ×R K . R K= ×R K 0 5 R K= ×R K R KE=0 Peak current mode Proportional slope K R T L SL KSL R K =RI× K =R × K =RII× For Q = 0.637 (single-cycle damping) S V D K T E AP VAP D V D SL =VV × ×× ×DD S V D R L N AP VAP D V D I =VV ×DD′ × m S S C E N = +1 = +1 = + Q C = × × ′ 1 0 5 π××××××((((((((((mmmmmmmmmmmmmmmmmmCCCCCCCC××××××DDDDDDDDDDDDDDDDDD′′ −−0 50 5)... K D R T L K D M I S L I S L K D I KKKSLL DDD = −D ×R −D ×RIIIIII× +× +× + ×××××KKKKKKKKKKSSSSSSLL×××××DDDDDDDDDD 1 0 5 II 22 SS ( .0 5 ( .0 5−−DDDDDD)))××RRRRRR K R T L D D K D I S L I S L D D I D D SL K= ×R K RIIIIIIII× ×× ×× ×D DD DD DD DD DD D×× ′ +++++KKKKKKKKKKSSSSSSSSLL×××××DDDDDDDDDD K 0 5 R K 0 5 R K 0 5 R K R K= ×R K 0 5 R K= ×R K R 2 0 5. 0 5 K 0 5 R K . R K 0 5 R K R K= ×R K 0 5 R K= ×R K . R K= ×R K 0 5 R K= ×R K R K K D L R E S KE KS K KL I K = −K K K × ×× ×DD Valley current mode Fixed slope VSL S T VSL S V =SE× V =S × V =SEE× S V T E SL VSL V = S V D R L N AP VAP D V D I =VV × ×× ×DD m S S C E N = +1 = +1 = + Q C = × × 1 0 5 π××××××(((((((((mmmmmmmmmmmmmmmmmmCCCCCCCC××××××DDDDDDDDDDDDDDDDDD−−0 50 5)... K D R T L V V M I SL VSL V AP VAP V = D− ×R D R × +× + 1 D 0 5 R D 0 5 R D 0 5 R D R D− ×R D 0 5 R D− ×R D R (D . R (DDD− . ×RRR (DDDD−0 5. ×RRRR (DD 0 50 5. RR (DD 0 50 5. RR (DDDDDD−−0 50 5. ××RRRRRR (DDDDDDDDDDDD−−−−0 5. )))))××××RRRRRRRRRRRR K R T L D D I K= − R K ×R × K ×R × K 0 5×RII× × ×× ×D DD D′ K 0 5 R K 0 50 5. R K 0 5 R K . R K 0 5 R K R KE=0 Valley current mode Proportional slope K R T L SL KSL R K =RI× K =R × K =RII× For Q = 0.637 (single-cycle damping) S V D K T E AP VAP D V D SL =VV ×DD′ × S V D R L N AP VAP D V D I =VV × ×× ×DD m S S C E N = +1 = +1 = + Q C = × × 1 0 5 π××××××(((((((((mmmmmmmmmmmmmmmmmmCCCCCCCC××××××DDDDDDDDDDDDDDDDDD−−0 50 5)... K D R T L K D M I S L I S L K D I KKKSLL DDD = D− ×R D RIIIIII× +× +× + ×××××KKKKKKKKKKSSSSSSLL×××××DDDDDDDDDD′ 1 0 5 D 0 5 R D R D− ×R D 0 5 R D− ×R D RII 22 SS (D . R (DDD− . ×RRR (DD−0 5. ×RR (DD 0 50 5. RR (DDDDDD−−0 50 5. ××RRRRRR (DDDDDDDDDD−−−−0 5. )))××××RRRRRRRRRR K R T L K D I S L I S L L K= − R K 0 5 R ′ ′ K 0 5 R K R 2 . ( . ( K . R ( K .... RII TT D DD D KKSS ((((DD L I S L . ( L I S L D D I D D S . II D DD D KKSS (DD . I KKSL (DD . KKLL (DD . × × KKL (DD . × × ( K ×R × K . R ( K ×R × K 0 50 5... ××RIIIIIIIIIIIIIIIIIIII×× × ×× ×× ×× ×× ×× ×× ×× ×D DD DD DD DD DD DD DD DD DD DD DD D′ −′−−−−−−−−−KKKKKKKKKKKKKKKKKKKKSSSSSSSSSSSSSSSSSSSSLLLL××××××××××((((((((((((DDDDDDDDDDDDDDDDDDDD K 0 5 R K . R ( K 0 5 R K R ) K K D L R E S KE KS K KL I K = −K K K × ′ × Emulated-peak current mode Fixed slope VSL S T VSL S V =SE× V =S × V =SEE× S V T E SL VSL V = S V R L N AP VAP R V RI =VV ×RR m S S C E N = Q C = × − 1 0 5 π××××××(((((((mmmmmmCCCCCC−−−−−−0 50 5)... K D R T L V V M I SL VSL V AP VAP V = D− ×R D R × +× + 1 D 0 5 R D 0 5 R D 0 5 R D R D− ×R D 0 5 R D− ×R D R (D . R (DDD− . ×RRR (DDDD−0 5. ×RRRR (DD 0 50 5. RR (DD 0 50 5. RR (DDDDDD−−0 50 5. ××RRRRRR (DDDDDDDDDDDD−−−−0 5. )))))××××RRRRRRRRRRRR K R T L D D I K= − R K ×R × K ×R × K 0 5×RII× × ×× ×D DD D′ K 0 5 R K 0 50 5. R K 0 5 R K . R K 0 5 R K R KE D T KE D K D K = −D K D× Emulated-peak current mode Proportional slope K R T L SL KSL R K =RI× K =R × K =RII× For Q = 0.637 (single-cycle damping) S V K T E AP VAP K V KSL =VV ×KK S V R L N AP VAP R V RI =VV ×RR m S S C E N = Q C = × − 1 0 5 π××××××(((((((mmmmmmCCCCCC−−−−−−0 50 5)... K D R T L K M I S L I S L K I KSL = D− ×R D RII× +× +× + SS 1 D 0 5 R D 0 5 R D 0 5 R D R D− ×R D 0 5 R D− ×R D R (D . R (DDD− . ×RRR (DDDD−0 5. ×RRRR (DD 0 50 5. RR (DD 0 50 5. RR (DDDDDD−−0 50 5. ××RRRRRR (DDDDDDDDDD−−−−0 5. )))××××RRRRRRRRRR K R T L D D K D I S L I S L D D I D D SL K= − R K ×R × K ×R × K 0 5×RIIIIIIIIII× × ×× ×× ×× ×D DD DD DD DD DD D′ +++++KKKKKKKKKKSSSSSSSSSSLL×××××DDDDDDDDDD K 0 5 R K 0 50 5. R K 0 5 R K . R K 0 5 R K R KE D T KE D K D K = −D K D×
peak-current-mode buck with proportional slope-com-pensation switching circuit was implemented in SIMPLIS. A standard type-II 10 MHz error amplifi er was used for frequency compensation. With T/L = (5 µs/5 µH) and RI = (0.1 V/A), the best performance was achieved with Q = 0.637 for a crossover frequency of 40 kHz and 45-degree phase margin. By setting Q = 1, a crossover frequency of 50 kHz was achieved, again with 45-degree phase margin but reduced gain margin. This appears to be the practical limit
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
for a stable voltage loop, at the expense of under-damping the current loop. With Q = 1, sub-harmonic oscillation is quite pronounced during transient response, but damps at steady state. The reader is encouraged to simulate and observe these effects directly. A simulation example for the boost is provided after the linear models and transfer func-tions are presented.
Linear Models
Simple, accurate and easy-to-use linear models have been developed for the buck, boost and buck-boost converter topologies. Each linear model has been verifi ed using results from its corresponding switching model. In this manner, validation for any transfer function is possible, identifying the accuracy limit of the given linear model. General gain parameters are listed in Table 1. These parameters are inde-pendent of topology, and written in terms of the terminal voltage (VAP
voltage (VAP
voltage (V ) and duty cycle (D).
The coeffi cients for the linear model of the buck regulator shown in Fig. 3 are:
V V D V V V V M D I V M R AP VAP V V VIN V VIN V V VVOUOUT IN VIN V OU VOU V T IN VIN V C AP VAP M V M OUT = = V =V = V =V DD= ′ − − = = M D= = M D I= I = VV ×MM , , D =D =′′ (1 D)=V , IN VIN V , and F K V M FM F M AP VAP V = .
The control-to-output simplifi ed transfer function is: v v R R K s s s OUT C OUT D Z P L = R ×K R K × + s s s s P L P L × + s s s s P L P L 1 R1 K R K 1 1 s 1 s 1 s 1 s 1 1 1 s 1 s 1+ s 1 s 1+ 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + ω ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωPP ωLL ωPP ωLL ω ω ωPP ωLL ωPP ωLL ω ω ,
and the line-to-output simplifi ed transfer function is:
, v v R D K R K s
and the line-to-output simplifi ed transfer function is:s and the line-to-output simplifi ed transfer function is:
s s OUT IN O N RO D N RO D KKN I D RI KD R K Z P L =RRRRRROOOO× ×× ×× ×× ×DDDDDD NNNN R ×K R K RI KD R ×K RI KD R K × + s s s s P L P L × + s s s s P L P L 1 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 1 1 s 1 s 1+ s 1 s 1+ 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + ω ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωPP ωLL ωPP ωLL ω ω ωPP ωLL ωPP ωLL ω ω where K R K R K K D D OUT M I KM RI K R M = + K ×R K R KM RI K ×R KM RI K R 1 = +1 = + , KKKKKKNN==== 1 −−−− and ωP OUT OUT M I COU R COUT RO C T RO KKMM RRII = × = × + K ×R KM RI KMM×RII KM RI T O T O C R C T RO C TT ROO C T RO C R C R C R C R 1 1 1 1 1 .
The coeffi cients for the linear model of the current-mode boost regulator shown in Fig. 4 are:
V V V V V V V M D I V M AP VAP V V VOU V VOU V V T OU VOU V V T VI V T VI V VN OU VOU V T IN VIN V OU VOU V T C AP VAP M V M = = V =V = V V VV −VV ′ = − = = ′ = V ×M V M , DD ,, V D , V OU D OUT I , D T IN, D N, = D= , = = D , ( D) ( D) = −( ) = −((1 )) , = −( ) = −1 = −( ) = − 1 R R R F K V OUT M FM F M AP VAP V and = .
The control-to-output simplifi ed transfer function is: v v R D R K s s s OUT C OU ROU D R T D R T D R D I D RI KD R K R Z P =RR ×DD′ R ×K R K RI KD R ×K RI KD R K ×
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
s s s s R Z R Z × +
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
s s s s R Z R Z
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
1 1 1 s 1 s 1− s 1 s 1− 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + 1 1 1 s 1 1+ s 1 1+ 1 1 1 1 1 1 1 1 1 1 1 × 1 × 1 ωR ωZ ωR ωZ ωRR ωZZ ωRR ωZZ ω ω ωRR ωZZ ωRR ωZZ ω ω ω +++ 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 s L ω , � ���� ������ ���� �� ����� �� ���� �� ������ �� ���� ���� ��� ���� �� ��� � ����� ����������� ���� ���� ��� ������ ������ � ���� ������ � � � �
Fig. 3. The low-frequency linear model for this buck regulator was made using SIMetrix.
NEW! Digi-Power
Multi-Charger
346 Monroe Ave., Kenilworth, NJ 07033 Tel: (908) 272-9262 • Fax: (908) 272-7630
www.ventronicsinc.com • e-mail: [email protected]
NEW! Digi-Power
Multi-Charger
Charges Computers, Digital Cameras, and 4 AA or AAA -NiMH/NiCD‘s Complete with: • 5V USB Plug • 12V Car Plug • AC Wall Plug • Batteries • Capacitors • Varistors • Transformers • Power Adaptersand the line-to-output simplifi ed transfer function is: v v R D K R K s
and the line-to-output simplifi ed transfer function is:s and the line-to-output simplifi ed transfer function is:
s s OUT IN OU ROU D R T D N R T D N R T D KKN I D RI KD R K Z P L =RRRRRR TTTT××DDDDDD′ ×× NNNN R ×K R K RI KD R ×K RI KD R K × + s s s s P L P L × + s s s s P L P L 1 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 1 1 s 1 s 1+ s 1 s 1+ 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + ω ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωP ωL ωPP ωLL ωPP ωLL ω ω ωPP ωLL ωPP ωLL ω ω , where K R D R K K D K K R R D R D OU ROU D R T D R T D R D I M RI KM R K N M RO D M RRROUTUT DDD R OUT = +RR ×DD′ ×× ++ ′ × + × + R K RII KMM RI KM R K RI KM R ××××K ++++ × + × + × + × + R K R K R K R ××××K ++++ == ++RR ×DD′ = × ′ 2 = +2 = + 2 111 KK 111 1 2 , , ω DDD L C R D R K K D P ou Cou R C t RO C t RO C R UT RRII KKMM 2 2 1 2 1 and ω =P ω =P ××× +++ ′ ××× +++ ′ × + × + R K RII KMM RI KM R K RI KM R ××××K ++++ × + × + × + × + R K R K R K R ××××K ++++ 1 2 1 2 × + × + C R C tt ROO C t RO C R C t RO C ××××R ++++ × + × + × + × + C R C R C R C ××××R ++++ .
The coeffi cients for the linear model of the current-mode buck-boost regulator shown in Fig. 5 are:
V V V D V V V V V V M D AP VAP V V VIN V VIN V V VVVVOUOUTT DDDD VVOUOUT IN VIN V V VOU V VOU V V T IN VIN V IN VIN V V VOU V VOU V V T = + V =V + V =VININ+ V VIN V =V + V VIN V V = V +V V V ′ = − =VV +VV = ′ , V , D V D , D D , ( D) ( D) = −( ) = −((1 )) , = −( ) = −1 = −( ) = − III V M R F K V C AP VAP M V M OUT M FM F M AP VAP V =VV ×MM and = .
The control-to-output simplifi ed transfer function is:
v v R D R K s s s OUT C OU ROU D R T D R T D R D I D RI KD R K R Z P =RR ×DD′ R ×K R K RI KD R ×K RI KD R K ×
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
s s s s R Z R Z × +
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is:
s s s s R Z R Z
The control-to-output simplifi ed transfer function is:
The control-to-output simplifi ed transfer function is: 1 1 1 s 1 s 1− s 1 s 1− 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + 1 1 1 s 1 1+ s 1 1+ 1 1 1 1 1 1 1 1 1 1 1 × 1 × 1 ωR ωZ ωR ωZ ωRR ωZZ ωRR ωZZ ω ω ωRR ωZZ ωRR ωZZ ω ω ω +++ 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 s L ω ,
and the line-to-output simplifi ed transfer function is:
v v R D D K R K s s s OUT IN OU ROU D R T D N R T D N R T D DD KKN I D RI KD R K K Z P =RRRRRR TTTTTT× ×× ×× ×× ×DDDDDD DDDDDDDD′′××KKKKKKKKNNNNNN R ×K R K RI KD R ×K RI KD R K × s s s s K Z K Z × + s s s s K Z K Z + 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 s 1 1 1 s 1 s 1+ s 1 s 1+ 1 1 ss 1 ss 1 ss 1 ss 1 1 1 1 1 1 1 1 × + 1 × +1 1 ss 1 ss 1 ss × +× +1 ss 1 × +× +× +1 × + 1 × +1 × + × + × + 1 × +× +1 1 × +× +× +× +1 1 × +× +× +× +× +1 × + × + × + 1 × +1 × + × + × + 1 ωK ωZ ωK ωZ ωKK ωZZ ωKK ωZZ ω ω ωKK ωZZ ωKK ωZZ ω ω ω × + × + × + × + × + × + × + × + × + × + × + × + × + × + × + 1 × +1 × + s L ω , where K D R D R K K D K K K D R D R D D KD D K D RRRROUOUTT DDDD I M RI KM R K N M I RI D R D OU ROU D R T D R T D R D K = +D K D+RR ×DD′ ××× +++ ′ × + × + R K RII KMM RI KM R K RI KM R ××××K ++++ × + × + × + × + R K R K R K R ××××K ++++ = − = − + RR ×DD R ×D R D′ K 1 D K D K = +D K 1 D K = +D K D 1 1 2 2 , , ωRRR OUT ROU D ROUT D R T D L D =RR ×DD′ L D× L D 2 , ω ω K OUT N P OUT OUT I M ROU D ROUT D N R TTT D KKNNN L K C D R T RO T O D RI KM RI KM K D =RRRR TTTTTT××DDDD′ ×× NNNNNN L K× L K = × = × + + ′ ××× +++ ′ × + × + I M I M R K RI KM RII KMM RI KM × + × + × + × + × + × + × + × + R K R K R K R ××××K ++++ 2 2 1 1 1 and 1 1 1 1 1 1 1 1 T O T O .
Boost Regulator Simulation Example
For the peak-current-mode boost converter example, comparisons of results from the switching circuit of Fig. 1 were made to the linear model of Fig. 4 using the sampling-gain term HP(s). To use the forward-path sampling-gain term, slope compensation was implemented with a fi xed ramp. The results will be slightly different if a proportional ramp is used, as this modifi es the modulator gain term KM and feed-forward term K. For an actual boost-converter implementation with a fi xed ramp, it is only possible to get
������ ���� �� ���� ���� ��� ��������� �� ����� �� ��� ��� ��� ��� ������� ������������� ������ ������ ���� ���� � � ���� ������� ������ � � � � ������ �
Fig. 5. The low-frequency linear model for this buck-boost regulator was made using SIMetrix.
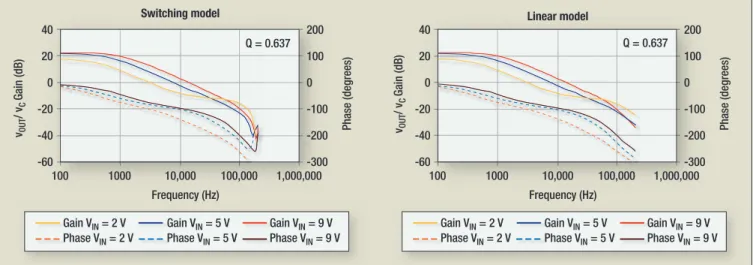
the optimal Q at one input voltage. The control-to-output gain plots in Fig. 6 show only a slight deviation between the two models at half the switching frequency, where fSW the two models at half the switching frequency, where fSW the two models at half the switching frequency, where f = 200 kHz. For the simulation, slope compensation was set for Q = 0.637.
The choice of simulation program is important, since not all SPICE programs calculate parameters with the same de-gree of accuracy. For switching-model simulation, SIMPLIS is able to produce Bode plots directly from the switching model. This program was used to produce the switching-model simulation results. The low-frequency switching-model was made with SIMetrix, which is the general-purpose simulator for the SIMetrix/SIMPLIS program. This simulator only handles Laplace equations for s in numerical form, where the numerator order must be equal to or less than the denomi-nator order. PSpice is much better suited for linear models with Laplace functions in parameter form. It is more accurate than the SIMetrix/SIMPLIS program but cannot produce Bode plots directly from the switching model. PSpice or a program with similar capability may be used to obtain the simulation results for the linear model.
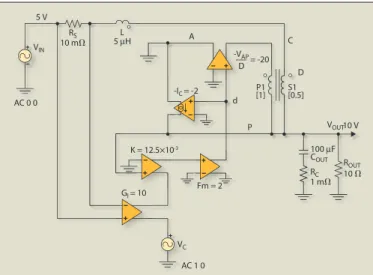
�� ����� ������ ���� �� ���� ���� ���� � ���� �� ����� �� ��� ���� ��� ��� �������� ������� ������������� ������ ���� ���������� � ������ ��� � ������ � � � �
Fig. 4. The low-frequency linear model for this boost regulator was made using SIMetrix.
CURRENT-MODE CONTROL
CURRENT-MODE CONTROL
Unifi ed Modulator Modeling
In Part I of this article, the criteria for current-mode control was considered. This led to the linear model, with the gain terms being easily identifi ed. The importance of the concept of KM as the modulator voltage gain cannot be overstated. Most linear models for current-mode control have allowed the math to defi ne the model. In reference 1, an intuitive understanding of the modulator was used to drive the math. By algebraic manipulation, both the averaged
model and continuous-time model were redefi ned to fi t the form of the unifi ed model. Combining the unifi ed-model gain blocks with the three-terminal PWM switch resulted in the linear models used here.
A new closed-current-loop sampling-gain term has been defi ned that accommodates any fi xed-frequency peak- or valley-derived operating mode. Limitation of the forward-sampling-gain term has been identifi ed, providing direction for further development in linear modeling. PETech
References
1. Sheehan, Robert, “Emulated Current Mode Control for Buck Regulators Using Sample and Hold Technique,” Power Electronics Technology Exhibition and Conference, PES02, October 2006. An updated version of this paper, which includes complete appendix material, is available from National Semiconductor Corp.
2. Ridley, R.B., “A New, Continuous-Time Model for Current Mode Control,” IEEE Transactions on Power Electronics, Vol. 6, Issue 2, pp. 271-280, 1991.
3. Tan, F.D. and Middlebrook, R.D., “A Unifi ed Model for Current-Programmed Converters,” IEEE Transactions on Power Electronics, Vol. 10, Issue 4, pp. 397-408, 1995. Fig. 6. This comparison of control-to-output transfer functions for a peak-current-mode boost converter using fi xed-slope compensation reveals the switching and linear models behave similarly, with a slight discrepancy at 100 kHz, which is half the switching frequency.
�� �� � ��� ��� ��� ��� ��� � ���� ���� ���� ���� ����� ������� �������� ��������� �������������� �������������� ��������������� �������������� ��������������� �������������� ��������������� ���� ����� �� �� ��� �� �� �� �� �� �� �� �� � ��������� ��������������� �� �� � ��� ��� ��� ��� ��� � ���� ���� ���� ���� ����� ������� �������� ��������� �������������� �������������� ��������������� �������������� ��������������� �������������� ��������������� �� �� �� �� �� �� �� � ���� ����� �� �� ��� �� ��������� ������������