DESIGN OF RECURSIVE DIGITAL
FILTERS USING MULTIOBJECTIVE
GENETIC ALGORITHM
GURLEEN KAUR
M.Tech (ECE), UCOE, Punjabi University
Patiala, Punjab, India
RANJIT KAUR
Reader, UCOE, Punjabi University
Patiala, Punjab, India
Abstract
The paper represents the design of recursive digital filter which minimizes both the magnitude and group delay simultaneously under the multi-objective optimization. In this paper Butterworth low pass filter is designed by optimizing magnitude and group delay. Multi-Objective problem are solved to generate non-inferior solutions under interactive environment. Multi-Objective problem of magnitude and group delay is solved using Multi objective Genetic Algorithm that operates on a complex, continuous search space and optimized by statistically determining the abilities of commonly used genetic operators. MATLAB programming is used for implementation of proposed algorithm. Experimental results show that the proposed method can effectively optimize the magnitude and group delay of the designed Butterworth low pass filter.
Keywords-Butterworth low pass filter, Multi objective optimization, simultaneously optimization of magnitude and group delay
1. Introduction
elliptic IIR filters that provides the implementation of half of the multiplication constants with few shifters and adders. Tang et al. [3] has used Hierarchical Genetic Algorithms to design and optimization of IIR filter structures. This scheme utilizes a new hierarchical multilayer gene structure for the chromosome formulation. It is a unique structure, which retains the conventional genetic operations, while the genes may take various forms to represent system characteristics. Sullivan et al. [4] have proposed the algorithm based on the peak– constrained least–squares optimality criterion for cascaded IIR filters, which can design a filter that has an equalized group delay without the use of all pass filters, and it can simultaneously meet the frequency response magnitude specifications by using all of the filter coefficients available to optimize the filter.
Lang [5] has used least square method for designing IIR filter with prescribed magnitude and phase response .This parameterization of the transfer function has been used for designing IIR filters. Dervis [6] has described a simple and global optimization Algorithm for engineering problems such as Differential Evolution Algorithm. DE algorithm is a population based algorithm like genetic algorithms using similar operators; crossover, mutation and selection. Nurhan [7] has proposed a method for design of minimum phase digital IIR filters using Genetic Algorithm. Gordana Javanovic [8] has proposed a method for the design of IIR (Infinite Impulse Response) notch filters with desired magnitude characteristic, which can be either maximally flat or equi-ripple. Butterworth polynomial, used for designing the all pass filter, will result in a maximally flat magnitude. Alfonso Fernandez- Vazquez [9] proposed a new method for flat IIR filter design with improved group delay .Xi Zhang [10] have proposed a novel method for designing maximally flat IIR filters with flat group delay responses in the pass band.Yu Wang, Bin Li[11] proposed Digital IIR filter design using multi-objective optimization evolutionary algorithm .In this methods developed to design a proper IIR filters that provide relatively more complete optimal solutions with equal consideration of magnitude response, linear phase response and the order of structure; can simultaneously optimize the structure and coefficients of digital IIR filter to obtain relatively better linear phase response and lower order, besides the good magnitude response. To approximate the magnitude and group delay response simultaneously, Multi-Objective Optimization Method is used. In this paper multiobjective optimization problem of recursive filter to minimize the difference between actual and desired response of magnitude and group delay is converted into single objective problem with weight method and then Multiobjective Genetic Algorithm method is used to solve the scalar optimization problem while calculating various genetic parameters.
2. Multiobjective Optimization
Like most other engineering problem, the design of IIR filters involves multiple, often conflicting, design criteria and specifications, and finding an optimum design is, therefore not a simple task. Direct search methods and gradient based methods usually lead to sub-optimal designs. Consequently, there is a need for optimization-based methods that can be used to design IIR filters that would satisfy prescribed specifications. However, optimization problems for the design of digital IIR filters are often complex, highly nonlinear, and multimodal in nature. The optimization method should lead to global optimum of the objective function with a minimum amount of computation. Optimization algorithm requires comparison of a number of a design solution, it is usually time consuming and computationally expensive, thus, the optimization procedure must only be used in those problems where there is a definite need of achieving a quality product or a competitive product. Therefore, they tend to locate minima in the locale of the initialization point. . In recent years, variety of algorithms has been proposed for global optimization including multivariable optimization algorithms and nontraditional optimization algorithms Evolutionary strategies for optimization have been gaining attention in recent years [12].
Multi-objective formulations are realistic models for many complex engineering optimization problems. In many real-life problems, objectives under consideration conflict with each other, and optimizing a particular solution with respect to a single objective can result in unacceptable results with respect to the other objectives. In most of the applications, particularly those in design, require the simultaneous optimization of more than one objective function, like printed wiring boards, control system design, the design of induction motors, analog circuits design based on fuzzy logic, modern power systems and for pricing system security in electricity markets. It means to get a best optimum value for design variables some type of compromise is required to get a satisfactory design. There are two standard methods for treating multi-objective problems, if a traditional optimization algorithm which minimizes a single objective is to be employed. One is to construct a composite objective:
minimize f̅ = ∑ a f (1)
f ≤ c where i = 1, N; i ≠ j (2) Where the c are the constraint limits.
Whichever of these approaches is used, the solution of the one objective problem so produced result in the identification of a single point on the trade-off surface, the position of which depend on the user. By using suitably adapted stochastic optimization methods it is possible to reveal the trade-off surface of a multi-objective optimization problem in a single run.
In case of optimization a magnitude and group delay simultaneously Multiobjective Genetic Algorithm is implemented. Being a population-based approach, GA is well suited to solve multi-objective optimization problems. A generic single-objective GA can be modified to find a set of multiple non-dominated solutions in a single run. The ability of GA to simultaneously search different regions of a solution space makes it possible to find a diverse set of solutions for difficult problems with non-convex, discontinuous, and multi-modal solutions spaces. The crossover operator of GA may exploit structures of good solutions with respect to different objectives to create new non dominated solutions in unexplored parts of the Pareto front. In addition, most multi-objective GA does not require the user to prioritize, scale, or weigh objectives. Therefore, GA has been the most popular heuristic approach to multi-objective design and optimization problems. Jones et.al reported that 90% of the approaches to multi-objective optimization aimed to approximate the true Pareto front for the underlying problem. A majority of these used a meta-heuristic technique, and 70% of all Meta heuristics approaches were based on evolutionary approaches.
3. Problem Formulation
Let H(ω, x) denotes the transfer function of the IIR filters where x indicates the filter coefficient (poles or zeros).The magnitude and group delay will be respectively denoted as P(x,ω) and θ( x,ω).
For IIR filters transfer function is given as:
H(z) = H 1 + a e + b e
1 + c e + d e (3)
H(e ) = P(x, ω) is the magnitude of the ilter
arg H (e ) = θ( x, ω) is the phase shift of the ilter
x = a , b ,c , d … . . a , b ,c , d , H denotes the ilter parameters (4)
Thefiltergroupdelaycanbedefinedas:
τ(x,ω) = −dθ( x,ω)
dω (5)
P(x,ω) = H N (ω, x)
D (ω, x) (6)
Where N (ω, x) =[1 + a + b + 2b (2cos ω − 1) + 2a (1 + b )cosω] / (7)
Dk(ω, x) = [1 + c + d + 2d (2cos ω − 1) + 2c (1 + d )cosω] / (8)
By solving eq. (6), following equations are obtained:
arg|H(ω, x)| = ∑ atan − (( )) − atan − (( ))
(9)
τ(x, ω) = ∑ − + (10)
where GN = (1 − b )[1 + b + a cos ω] (11)
Ideal digital filter should satisfy the following conditions for magnitude and group delay. Magnitude of ideal recursive filter is given by the following equation:
P(x, ω) = P (ω, x) = 0 for ω ε stopband 1 for ω ε passband
Where ω the union of pass band and ω is the union of stop band regions.
Group delay will be considered as:
τ(x, ω) = τ ω for ω
τ isaconstant.Fortheconstantgroupdelayfilterisequalizedexactlyforallfrequenciesinpassbandregion.
Magnitude approximation
Minimization of weighted error function between amplitude response of filter and the ideal response with respect to filter coefficient is the amplitude approximation problem.
f(1) = W(ω) + | P(x,ω) − P (ω, x) | (13) Where W (ω) is the positive weighting function and for the design of Butterworth IIR filter value of W (ω) = 1
Group delay approximation
The second function to be approximated is group delay i.e. to minimize weighted error function between the deviations of the group delay function from a constant value.
f(2) = |τ(x,ω) −τ | (14) The multi-objective optimization problem is solved to find the values of Objective functions f (1) and f (2) corresponding to filter parameter that optimizes magnitude and group delay.
4. Solution Methodology
Various steps used for the designing of recursive Butterworth filter are as: 1. Magnitude and Group Delay equations are specified in above equations.
2. The desired Magnitude and Group Delay characteristics are specified at discrete set of frequencies ω. 3. The Multi-Objective problem of optimizing simultaneously Magnitude Response and Group Delay is converted into scalar problem to generate Objective functions for Magnitude and Group Delay in a polynomial form using weighted sum method. The weight for different weight combinations by considering all the objectives, the non-inferior solutions are generated considering all the objectives simultaneously. Weights generated randomly corresponding to the coefficients of filter. The weighing coefficients w and
w are used to select the effect of error on magnitude and group delay.
4. The Scalar Optimization problem optimizes the magnitude and group delay using Multi-Objective Genetic Algorithm by defining various Genetic Operators.
5. Algorithm
1. Create an initial population of random solutions (chromosomes) and evaluate the fitness function that is to be minimized for encoded versions for each chromosome.
2. Assess the chromosomes for fitness using the criteria imposed on the required solution. Create an elite set of chromosomes by selecting a number of chromosomes that best satisfy the requirement imposed on the solution.Tournment selection method are used to select the best fitness function.
3. If the top-ranking chromosome in the elite set satisfies fully the requirements imposed on the solution, output that chromosome as the required solution, and stops. Otherwise, continue to Step 4.
6. Results and Discussions
The design of Butterworth low pass and high pass recursive digital filter in multi-objective optimization framework is achieved for different values of pass-band and stop-band frequencies. In Table 1, the data taken for the design of second order low pass filter is given.
Table 1 Filter Specifications
Filter Specification Value
Positive Weighting function for passband and stopband (W(ω)) 1
Passband frequency (ω ) (0,0.3π)
Stopband frequency (ω ) (0.4π, π)
Number of iterations (K) 100
Pole Radius Constraint (R) 0.99
Passband attenuation ( R ) 3db
Stopband attenuation (R ) 60db
Cut off frequencies ( ω ) (0,1)
Order of Butterworth low and high pass filter (N) 2
Butterworth low pass filter
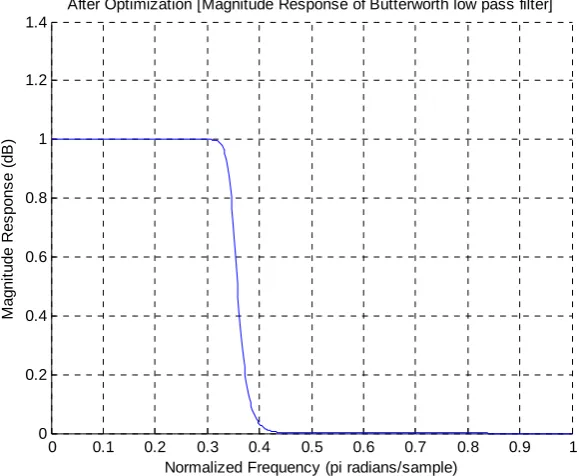
The magnitude obtained is optimized using Multi-Objective Genetic Algorithm. The optimization result in shown in Fig.1. It can be seen from graph that after optimization magnitude response becomes flat in the passband and rolls down to zero in the stopband. It is also refered as a maximally flat magnitude filter. The Butterworth filter is a type of signal processing filter designed to have a flat frequency response in the passband it is also referred as a maximally flat magnitude filter. There is no ripple in the passband of a Butterworth filter. The Butterworth filter, however, has a flatter response in the passband. The complexity of Butterworth filter is defined by the filters "order", and which is dependent upon the number of reactive components such as capacitors or inductors within its design. The rate of roll-off and therefore the width of the transition band depend upon the order number of the filter and that for a simple first-order filter it has a standard roll-off rate of 20dB/decade or 6dB/octave.
The frequency response of the Butterworth Filter approximation function is referred as "maximally flat" (no ripples) response because the pass band is designed to have a frequency response which is as flat as mathematically possible from 0Hz (DC) until the cut-off frequency at -3dB with no ripples. The frequency response of the Butterworth Filter approximation function is referred as "maximally flat" (no ripples) response because the pass band is designed to have a frequency response which is as flat as mathematically possible from 0Hz (DC) until the cut-off frequency at -3dB with no ripples. Higher frequencies beyond the cut-off point rolls-off down to zero in the stop band at 20dB/decade or 6dB/octave. This is because it has a "quality factor", "Q" of just 0.707.
Fig. 1Magnitude Plot of second order Butterworth low pass filter
Fig. 2 Group Delay Plot of Butterworth low pass filter
Table2 Lowpass filter coefficients, Magnitude and group delay for randomly generated weighting factors a b c d H
1.07 1.0 -0.1 0.1 0.6 9.54
0.7 1.2 -0.3 0.1 0.9 10.26
0.6 1.2 -0.3 0.08 0.9 10.26
0.6 1.2 -0.3 0.07 0.9 10.26
0.6 1.2 -0.3 0.03 1 11.318
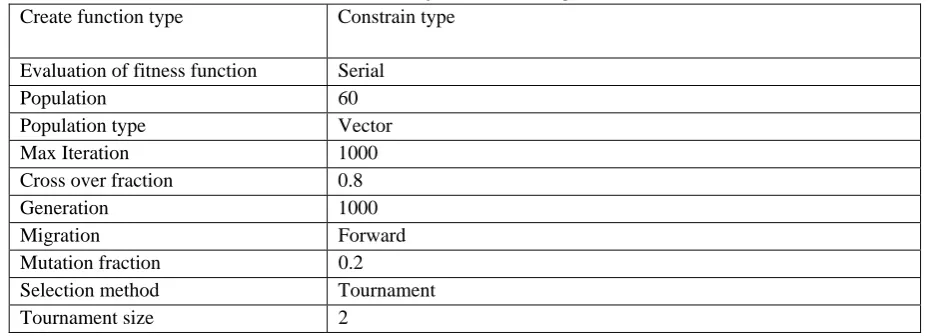
Table 3 shows the various Genetic Algorithm parameters that are used to optimize the magnitude and group delay simultaneously for Butterworth lowpass.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4
Normalized Frequency (pi radians/sample)
M
agn
it
ude Res
pon
s
e (
dB
)
After Optimization [Magnitude Response of Butterworth low pass filter]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
11 12 13 14 15 16 17 18 19 20 21
Normalized Frequency (pi radians/sample)
G
ro
up D
el
a
y
(
dB
)
Table 3 Genetic Algorithm Parameters Specification Create function type Constrain type
Evaluation of fitness function Serial
Population 60
Population type Vector
Max Iteration 1000
Cross over fraction 0.8
Generation 1000
Migration Forward Mutation fraction 0.2 Selection method Tournament Tournament size 2
Table 4 Comparison of presented method with other conventional methods
Method Butterworth low pass filter magnitude and group delay
Proposed method(2nd order) In case of low pass filter it gives maximally flat response in passband and rolls off to zero in stopband. They have linear phase in passband. Optimized values are:
Butterworth Low pass filter H=1,τ =11.318
Classical Methods(CHBY1, CHBY2, and ELTC)
In these methods after optimization its produces ripples in passband and introduce linear phase distortion. Butterworth filter have linear phase response in passband as compared to other types. In case of Butterworth there is very less over shoot. Butterworth filter have flat magnitude response because its top is flattest as compared to other types have rounded top or uneven. In Butterworth poles locations are found independently without depending on each other or by factorizing.
Method in [5] It shows ripples in stopband in case of magnitude and gives
nonlinear phase response. .
In Table 4, comparsion of proposed method (Multi-Objective Genetic Algorithm) is done with the Least Square method [10]. Better response is obtained by proposed method. Comparison of specifications obtained is done in Table 5
Table 5 Comparison of Specifications Filter type Delays Multipliers Adders Gain
constant
Group delay W(ω) Pole
radius
IIR[10] 15 20 19 -0.003 12samples 10 in stopband 1 in
passband
Proposed Method
5 4 4 0.2
output gain=1
11samples 1 0.99
Multi-objective optimization for the simultaneous minimization of magnitude and group delay is presented for the low-pass and high filters designing. From the results it is clear that the algorithm gives the optimal value of the variables to optimize magnitude and group delay simultaneously. The filter designed by proposed algorithm satisfies all required Magnitude constraints and is considerably better than the filter proposed in [5], also the complexity required for implementation is smaller. The algorithm is useful for improving specifications in terms of magnitude and group delay for the designing purpose. The algorithm designs the stable filter without guessing pass-band and stop-band ripples.
7. Conclusion and Future Scope
In this present paper, the design of digital IIR Butterworth filter is taken up under the multi-objective framework in which magnitude as well as group delay are optimized simultaneously. The filter is designed so as to approximate prescribed specifications of magnitude and group delay with respect to the coefficients of the transfer function and by considering the filter parameters. Recently most optimization techniques were formulated in terms of minimizing and maximizing a single objective. Today, however, there is much attention towards formulating these problems in terms of multi-objectives. In this thesis Genetic Algorithm is used to solve multi-objective problem and provide better results as compared to classical methods and other Evolutionary Algorithms. In the experimental study, GA gained better results than the compared state-of-the-art algorithms on Butterworth low and high pass filter design cases with remarkably lower computational cost.GA does not require any limitation of the design objectives or the designable filter class. Butterworth low pass filter is flat in passband and rolls off to zero in stopband. GA can be implemented to various multidimensional and higher filter orders. Multi-Objective GA can be implemented to optimize band pass and band stop filters.
References
[1] Coretlazzo.C. and M.R.Lightner, “Simultaneous Design in Both Magnitude and Group-Delay of IIR and FIR Filters Based on
Multiple Criterion Optimization,” IEEE Transactions on Acoustics, Speech and Signal Processing, Vol no. 5, October 1984.
[2] Lutova, “Design of computationally efficient elliptic IIR filters with a reduced number of shift-and-add operations in
multipliers”, IEEE Transactions on Signal processing, Vol no.45, Issue no: 10, October 1997.
[3] Tang and Kim-Fung Man, “Design and Optimization of IIR Filter Structure Using Hierarchical Genetic Algorithms,” IEEE
Transactions on Industrial Electronics, Vol. no.45, Issue No.3, June 1998.
[4] Sullivan James L and John W.Adams, “PCLS IIR digital filters with simultaneous frequency response magnitude and group
delay specifications,” IEEE Transactions on Signal Processing, vol.no.46, Issue no.11, Nov 1998.
[5] Lang 2000, “Least-Squares Method for Design of IIR Filters with Prescribed Magnitude and Phase Responses and a Pole Radius
Constraint,” IEEE Transactions on Signal Processing, Vol. No. 48, Issue no.11, November 2000.
[6] Dervis Karaboga, “Simple and global optimization Algorithm for Engineering problems”, DE, Turk J Elec Engin, Vol 12,
No.1.2004
[7] Nurhan Karaboga, “Design of minimum phase digital IIR filters by using Genetic Algorithm”, Proceedings of the 6th Nordic
signal Processing Symposium-NORSIG 2004
[8] Gordana Jovanovic-Dolecek, “Design of IIR Notch filters with maximally flat or equiripple magnitude characteristics”, 14th
Europeon Signal Processing Conference (EUSIPCO 2006), Florence, Italy, September 4-8, 2006
[9] Alfonso Fernandez, “New Method for Flat IR Filter Design with Improved Group Delay,” Proceedings of the 6th International
Caribbean Conference on Devices, Circuits and Systems, Mexico, Apr. 26-28, 2006.
[10] Xi Zhang, “Design of maximally flat IIR filters with flat group delay responses”, Signal Processing 88(2008) 1792-1800.
[11] Yu Wang, “Digital IIR filter designing multi-objective optimization evolutionary algorithm Yu Wang,” Pbox 4, Heifei, Anhui,
Nature Inspired Computation and Application Laboratory (NICAL), University of Science and Technology of China.
[12] K. D. Jong, “Hybrid methods using genetic algorithms for global optimization,"IEEE Trans. Systems Man Cybernatics, vol.