2016 International Conference on Wireless Communication and Network Engineering (WCNE 2016) ISBN: 978-1-60595-403-5
Parameter Estimation of Non-linear Dynamic Channel Based on UKF
Lu-yong ZHANG, Bao-zheng TANG
*and Pei-pei ZHU
Key Laboratory of Universal Wireless Communications Ministry of Education Beijing University of Post and Telecommunications Beijing, China
*Corresponding author
Keywords: Cognitive radio, Colored noise model, Unscented kalman filter, Channel estimation.
Abstract. The current research results of cognitive radio are too many, people have made a lot of efforts to estimate the parameters of cognitive channel. But the channel noise model in these articles is Gauss noise model, this model is different from the reality of the channel. There is a certain deviation between the research result and the actual under this condition. For this problem, in this paper, a channel model based on Colored noise model is proposed, which is based on the steady state distribution as the noise model. Realization of channel parameter estimation by UKF algorithm, After the study, it is found that UKF has better effect on the estimation of the parameters of the nonlinear dynamic channel than the other algorithms.
Introduction
Cognitive radio is an intelligent radio system based on software defined radio platform. It is able to adapt to the requirements of different environments by self-learning[1]. At present, the research of cognitive radio has been more mature, and the research on the parameter estimation of cognitive channel also has a lot of results. However, the research of the channel model is mostly in the non-dynamic state, the simulation results will be slightly different with the true. In this paper, a noise control system based on Colored noise model is proposed, a nonlinear dynamic channel model is established. Using different algorithm for parameter estimation, found that the parameter estimation effect of UKF in nonlinear dynamic channel is better than other methods.
System and Channel Model
Rayleigh distribution is one of the most common types of distribution for describing the reception envelope or the independent multi-path component of the flat fading signal. The envelope of the two orthogonal Gauss noise signal obeys the Rayleigh distribution the noisy of this model contains colored noisy.
Colored noise is the noise of the power spectral density function[5]. Most of the audio noise spectrum are mainly non white noise frequency spectrum is a stochastic process and the stochastic process with the power spectral density function, the power spectral density function and the shape determines the color noise.
modulation Serial to
parallel IDFT
Parallel to serial
Insert protection
Digital to analog
modulation Spectrum
sensing
demodulation Parallel to
serial DFT
Serial to parallel
Remove protection
Analog to digital Carrier
allocation
[image:2.595.78.511.70.185.2]noise
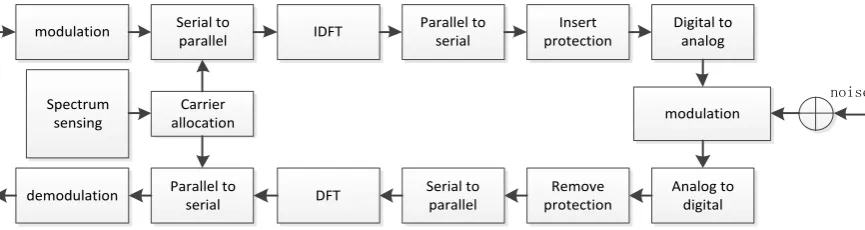
Figure 1. Process of NC-OFDM.
UKF Algorithm
Kalman filter is a linear minimum variance estimation, compared to the previous least square method and the minimum mean square error estimation[10], it has obvious advantages as follows:
First, the algorithm is recursive, and the state space method is used in the design of the filter in the time domain. This method is very suitable for the estimation of the multidimensional stochastic processes.
Second Kalman uses the state equation to describe the variation of the estimated parameters, Kalman estimated that the object can be smooth and can be non-stationary, that is, Kalman filter applied to the process of non - stationary.
Third Kalman filter of discrete type is very suitable for operation on the computer.
The most important of UKF is UT algorithm [6]. Suppose the n-dimensional random vector X transfer to m dimensional random vector Y after nonlinear transform form
( )
Y f X (6) If the average value of X is X, Variance matrix PXX , the average value of Y is
Y
, Variancematrix PYY , UT transform as follows:
According to X mean and square sampling:
(0)
x X (7)
( )
( )
( ( ) ) 1, 2,...
i
XX i
x X n
P i n (8)( )
( )
( (
)
)
1,
2,...2
i
XX i n
x
X
n
P
i
n
n
n
(9) Sample points generated by nonlinear transformation:( ) ( )
[ ] 0,1, 2...2
i i
Y f X i n (10) Analysis and calculation weights
( ) 0
m
W
n
(11)( ) 2
0 1
c
W
n
(12)
( ) ( ) 1
1, 2...2 2( )
m c
i i
W W i n
n
(13)
2
(n k) n
(14) Determine the mean and variance matrix of the mapping[7]
2 ( ) 2 n m i i i
Y W Y
(15)2
( ) ( ) ( ) 2
[ ][ ]
n
C i i T
YY i
i
P W Y Y Y Y
(16)The above is the process of the whole UT transformation.
Unscented Kalman filter has a good effect on the tracking performance of time varying channel. EKF solve this problem by the Taylor expansion of the function and discard high level of it. But when the function is highly nonlinear, the final error will be very obvious[8]. Sampling based nonlinear filtering algorithm can solve the nonlinear problem, the common methods are particle filter algorithm (PF) and Unscented Kalman Filter(UKF),Comparison between the two methods found UKF no PF particle degradation problem[9], and has a relatively small amount of computation. The calculation steps of UKF are as follows:
First sampling strategy
(17)
Here shows degree of dispersion, shows the distribution of Sigma, usually , is scale parameter, is state distribution parameter.
Then time update:
(18)
Measurement update equation:
0
( ) 0
( ) 2 0
( )
( ( ) ) , 1, ,
( ( ) ) , 1, , 2
(1 )
1
2( )
i x x i x
i x x i x x
m x c x m i x x x
x x L P i L
x x L P i L L
W L W L W L 2
(n k) n
4
1 e
| 1 1 1
2 ^
( ) , | 1 0
^ ^
2 ( )
, | 1 , | 1
0
| 1 | 1 1
2 ^
( ) , | 1 0
[ , ]
[ ][ ]
[ , ]
x
n n n n
L
m x i i n n i
L
c x x T
n i i n n n i n n n
i
x n
n n n n n
L m
n i i n n
i
F
x W
P W x x
Y H
y W Y
(19)
is extended state vector dimension. is state noise covariance matrix. is the measurement noise covariance matrix. Get time domain impulse response estimation of channel by channel estimation. Then frequency can get use FFT.
Simulation Results and Analysis
[image:4.595.169.425.404.602.2]In figure 1 we can see, noise is a random process, and the random process has its power spectral density function. The power spectral density function of the shape is determined by the color of the noise. The power spectral density function of the white noise is a constant in the whole range of real number. The power spectral density function of colored noise is not constant.
Figure 1. Colored noise contrast Gauss white noise.
It is a common method to detect the channel estimation effect of UKF by tracking the impulse response of the channel. UKF can realize the estimation and tracking of nonlinear channel parameters. As Figure 2 shows, the response of the channel and the estimation result of UKF are very good coincident, which proves that UKF can be used in the estimation of nonlinear channel.
^ ^
^ ^
^ ^
2 ^ ^
( )
, | 1 , | 1
0
2 ^ ^
( )
, | 1 , | 1
0
1
^ ^ ^
[ ][ ]
[ ][ ]
[ ]
[( ) ( ) ( ) ]
( )
n n
n n
n n n n
y yn n L
c x x T
i i n n n i n n n
y y
L
c x x T
x y i i n n k i n n n
T T T T
x T T n T T
x y y y
T
n n
n n n n
P W Y y Y y
P W x Y y
x x v n
K P P
P P KP K
x x K y y
x
Figure 2. UKF Tracking effect.
In the application of nonlinear dynamic channel, the minimum mean square error of UKF algorithm is less than other algorithm. After channel estimation, the minimum mean square error of the channel estimation is calculated. With the increase of signal to noise ratio, the minimum mean square error will decrease gradually. UKF algorithm has a relatively advantage in channel estimation when channel is nonlinear and dynamics. In figure the UKF has a good performance in the channel estimation.
Figure 3. Channel tracking performance.
Conclusion
[image:5.595.160.426.421.621.2]References
[1] Fatma Newagy, Global Energy-Efficiency Metric for Coordinated CognitiveRadio Networks, IEEE Journals & Magazines, 2016, Volume: 4, pp. 6733 - 6738.
[2] Syed Hashim Raza Bukhari, Sajid Siraj, Mubashir Husain Rehmani, A Novel Channel Bonding Algorithm for Cognitive Radio Sensor Networks, IEEE, 2016, Volume: 4, pp. 6950-6963.
[3] Hijazi H, Ros L. Rayleigh Time-varying channel complex gains estimation and ICI cancellation in OFDM systems[J].European Trans. on Telecommunications, 2009, pp. 782-796.
[4] Jia Min, Gu Xue-mai, Wu Qun, Improved channel estimation based on adaptive SVM for NC-OFDM systems, Journal of Harbin Institute of Technology (New Series), No.5, 2012.
[5] Mingyue Cui, Shitong Wang, Liangchao Geng, Tracking control for a class of random Lagrange systems with colored noise, IEEE Conference Publications, 2016, pp.1814-1819.
[6] Baohao Chen; Qimei Cui; Fan Yang; Jin Xu. A novel channel estimation method based on Kalman filter compressed sensing for time-varying OFDM system. Wireless Communications and Signal Processing (WCSP), 2014, pp. 1-5.
[7] Shady A. Maged, A. A. Abouelsoud; Ahmed M. R. Fath El Bab; Toru Namerikawa, Stewart Platform Manipulator: State Estimation Using Inertia Sensors and Unscented Kalman Filter, (ICISCE), 2016, pp. 113 -1140.
[8] Yi Liu, Wenbo Mei, Huiqian Du, Two compressive sensing-based estimation schemes designed for rapidly time-varying channels in orthogonal frequency division multiplexing systems[J], IET Signal Processing 2014.
[9] Wei-Chang Chen; Char-Dir Chung, Spectrally Efficient OFDM Pilot Waveform for Channel Estimation. IEEE Transactions on Communications. 2016, pp.1-17.