CITE THIS ARTICLE: K.Sangeetha, Kavibharathi, Gnanasoundari & Kishorekumar T., “Traffic Controller Using Image Processing”, Mediterranean Journal of Basic and Applied Sciences, Volume 3, Issue 1, Pages 76-82,
January-March 2019.
Traffic Controller Using Image Processing
Mrs.K.Sangeetha1, Ms.Kavibharathi2, Ms.Gnanasoundari3 & Mr.Kishorekumar T4
1Assistant Professor, Department of Electronics and Communication Engineering, SNS College of Engineering, Coimbatore, Tamil Nadu, India. 2,3,4Department of Electronics and Communication Engineering, SNS College of Engineering, Coimbatore, Tamil Nadu, India.
Article Received: 30 August 2018 Article Accepted: 29 December 2018 Article Published: 24 March 2019
I. INTRODUCTION
The project is to detect the traffic by using image processing on Raspberry Pi board and also to detect the
emergency vehicles through the RF Module technology. Our project system can be capturing the image or it can
process the video and which is used for identifying or comparing the images in the database. And the Emergency
vehicles can be detected through the RF transmitter and receiver where it can give the dynamic change the signals
without having the vehicle to stuck into the traffic. Image tracking of moving vehicles can give us quantitative
description of traffic flow.
In the present work the designed system aims to achieve the following.
To give Extension in the green signal timing for the traffic detected path
To store the database of the Emergency vehicles that are crossing the particular path
To give way for the Emergency vehicles by dynamically changing the signal
II. EXISTING MODEL
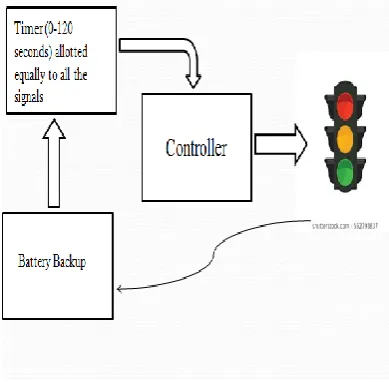
In existing system, the traffic has been controlled in the timing based where each lane has an allotted time and they
have to work on the basis. For example, when the 1st lane has the green signal for 90seconds then the 2nd lane has to
wait for 90seconds and the other lane has to work on the basis of the other lanes Timing. Hence the working has an
allotted time so that the controller will controls the signal on the pre assigning of the timing in the program basis.
Thus the other path vehicle has to wait for the particular time even though it has no vehicles or traffic on that green
signaled path. This was the main disadvantage when comparing to the proposed model.
A B S T R A C T
The purpose of this paper is to develop a prototype to control the traffic which is an main issues mainly in the metropolitan cities. Traffic problems nowadays are increasing because of the growing number of vehicles and the limited resources provided by current infrastructures. The simplest way for controlling a traffic light uses timer for each phase. Another way is to use electronic sensors in order to detect vehicles, and produce signal that cycles. We propose a system for controlling the traffic light by image processing. The system will detect vehicles through images and live video instead of using electronic sensors embedded in the pavement. CCTV camera will be used to capture the images or video which is kept alongside the traffic light. It will capture image sequences. Setting image of all the vehicles as reference image, the captured images are sequentially matched using image matching. For this purpose edge detection has been carried out using Prewitt edge detection operator and according to percentage of matching traffic light durations can be controlled. Second feature is to detect the emergency vehicles through the RF Module technique in which the vehicle is given an RF ID card that has an IC chip within it and RF Module get fixed at the bottom of the road so that the vehicle got detected when it crosses the particular path.
Fig 1 - Existing model block diagram
III. DESIGN METHOD
The prototype has a model where the traffic controller will process according to the density of the traffic and also it
gives priority to the emergency vehicles in order to give the way for the emergency vehicles. The first and foremost
method of detecting the traffic is the Image Processing technique and the Emergency Vehicle has been detected
through the RF Module technique to give the dynamic change in the traffic signals.
IV. BLOCK DIAGRAM
The Block diagram will explains the two methods:
1st feature is the Image Processing technique where the traffic density is detected through the CCTV camera and it
compares the real image with the image data that is already stored in the database, and by comparison it will detect
the density and gives green signal timing extension for that particular path where the traffic got detected.
2nd feature is to detect the Emergency Vehicle through the RF Module which fixed at the road and RF ID card that
is given to the particular vehicle. When the card is detected at the Module it sends an signal to the controller and so
the there is Dynamic change in the particular path to give green signal in order to give way to the emergency
vehicles without waiting for the signals.
V. HARDWARE IMPLEMENTATION
1. CCTV CAMERA
Nowadays image processing is an established field of science and the respective algorithms are well developed.
Image filtering is an operation on the source image pixels in order to create a new, filtered image. Transformation
of a particular pixel is obtained by taking a surrounding of this pixel covered by the so-called filter mask and by
computing a new pixel as linear combinations products of both configurations treated as vectors in case of linear
filters or by some nonlinear operation in case of nonlinear filters.
Thresholding is one of the basic transformations used in the image analysis [6]. This operation transforms gray
scale images into black and white. Binary images have two levels of brightness: white (value 1) and black (value 0).
The main purpose of thresholding is a radical reduction of information in order to simplify further processing. Basic
colour space for cameras is RGB (red green blue) but it is difficult to follow how RGB components change due to
change of lightning conditions or iris diaphragm. That is why the authors typically use HSV colour space for
thresholding.
Measuring objects is one of the final stages of computer image analysis. The result of the measurements is
numerical values describing selected features of detected objects in the image. One of parameters, which is
important and relatively simple to calculate, moreover characterized by a high degree of accuracy is an area of the
object
Image processing can be done through image processing module that includes linear and non-linear image
filtering, geometrical image transformations (resize, affine and perspective warping, generic table-based
remapping), colour space conversion, histograms, and so on.
Video analysis module that includes motion estimation, background subtraction, and object tracking algorithms.
Counting objects is realized with certain indexes assigned to all pixels of an object. They indicate, to which object
the pixel belongs. In order to assign indices the image is usually transformed to a binary form.
2. RASPBERRY PI
Image processing is the process of performing some mathematical functions and operations on an image, images or
video. The output that we get after image processing is a set of parameters or some altered image, images or videos.
The Raspberry Pi is a low cost, credit-card sized computer that plugs into a computer monitor or TV, and uses a
standard keyboard and mouse. It is a capable little device that enables people of all ages to explore computing, and
to learn how to program in languages like Scratch and Python.
An SD card inserted into the slot on the board acts as the hard drive for the Raspberry Pi. It is powered by USB and
the video output can be hooked up to a traditional RCA TV set, a more modern monitor, or even a TV using the
HDMI port.
Fig 4 – Raspberry Pi
3. RF ID TAG
Radio-frequency identification (RFID) uses electromagnetic fields to automatically identify and track tags attached
to objects. The tags contain electronically-stored information. Passive tags collect energy from a nearby RFID
reader's interrogating radio waves. Active tags have a local power source (such as a battery) and may operate
hundreds of meters from the RFID reader. Unlike a barcode, the tag need not be within the line of sight of the
reader, so it may be embedded in the tracked object. RFID is one method of automatic identification and data
capture. It also contain the database of the chip that have been maintained to identify the type of vehicle during
emergency time.
Fig 6 – RF Tag (outer picture)
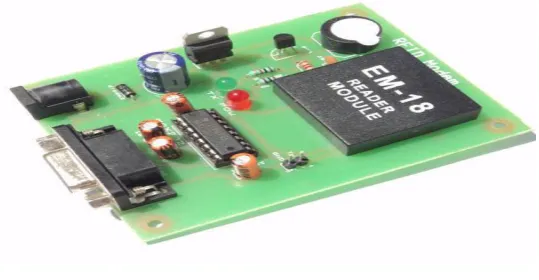
4. RF MODULE
A radio frequency identification reader (RFID reader) is a device used to gather information from an RFID tag,
which is used to track individual objects. Radio waves are used to transfer data from the tag to a reader. RFID is a
technology similar in theory to bar codes.
This radio frequency identification or RFID is a technology which is working on radio frequency of radio waves.
So whenever this object is in the range of the reader then this RFID tag used to transmit its feedback signal to
the reader. So it is very similar to the technology which is used in a barcode.
Fig 7 – RF Tag Reader
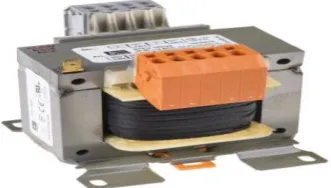
5. TRANSFORMER
A Transformer is a static apparatus, with no moving parts, which transforms electrical power from one circuit to
another with changes in voltage and current and no change in frequency.
Transformers generally have one of two types of cores: Core Type and Shell Type. These two types are
distinguished from each other by the manner in which the primary and secondary coils are place around the steel
core.
The concept of a step down transformer is actually quite simple. The transfer has more turns of wire on the
primary coil as compared to the turns on the secondary coil. This reduces the induced voltage running through the
Fig 8 – Step down Transformer
VI. SOFTWARE IMPLEMENTATION
1. PYTHON
Python is a general purpose and high level programming language. You can use Python for developing desktop
GUI applications, websites and web applications. Also, Python, as a high level programming language, allows you
to focus on core functionality of the application by taking care of common programming tasks.
Python is a scripting language like PHP, Perl, Ruby and so much more. It can be used for web programming
(django, Zope, Google App Engine, and much more). But it also can be used for desktop applications (Blender 3D,
or even for games pygame). Python can also be translated into binary code like java.
Applications of Python in the Real World. It works on cross-platform operating systems and can be used across to
develop a wide range of applications including those intended for image processing, text processing, web, and
enterprise level using scientific, numeric and data from network.
VII. CONCLUSION
Thus, the proposed system was quite easy to adapt and it had framed by using the important feature to give
extension in the green signal timing and giving the way for emergency vehicles. By which there is no any other
illusion in controlling the system because the programming language is higher so the working of the system can be
made easier. Hence the allocation time is varying so that the project can sustain easily and it can easily adaptable by
the vehicle users. Emergency vehicles also get huge advantage in implementation of this project.
VIII. FUTURE WORK
In future, we have an idea to store the data by using Cloud Computing technology. The data that are collected
through the cloud computing technology is in which path the vehicle travelling the most and the details of the
emergency vehicle which are crossing on that particular path.
REFERENCES
1. G.Sathya, “Intelligent traffic route monitoring and security safeguard in vehicle automation”, International
Journal of Advanced Research in Biology engineering science and technology, Volume 2, Number 10 pp.
1789-1793, ISSN: 2395-695x, March 2016
2. G.Sathya,P.Manojkumar & Keleena shalin nigli, “Rescue drone with drop box in medical field” International
3. G.Sathya,K.Sangeetha & S.Siddharthan, “Smart way toll collection system” Suraj punj journal for
multidisciplinary research,Vol 9,Issue 3,ISSN NO:2394-2886,Mar2019.
4. G.Sathya, Nikitha.S.Paulin, S.Saranya, “Glass Climbing Robot for Glass wall cleaning” International
Educational Scientific Research Journal, vol.2, issue 12,ISSN:2455- 295X,December 2016. Impact Factor 4.471
5. G.Sathya, “Smart voting system using Aadhar card” Asian journal of Applied Science and
Technology,vol.1,issue.1, Pages:96-98 , Feb 2017.
6. P.Kalaivani & G.Sathya, “Dynamic data routing in MANET using position based opportunistic routing
protocol”, International journal of research in computer applications and robotics, volume 2, number 12, ISSN:
2320-7345, Dec-14.
7. P.Kalaivani, G.Sathya, Nikitha.S.Paulin, “Performance improvement of distributed island multicasting with
overlaydata distribution”, Australian Journal of Basic and Applied sciences,ISSN 1991-8178 Vol.9
8.V. Kastrinaki, M. Zervakis, and K. Kalaitzakis, “A survey of video processing techniques for traffic applications,” Image and Vision Computing, vol. 21, pp. 359-381, Apr 1 2003
9.C. Gonzalez, E. Woods, and L. Eddins, Digital Image Processing Using Matlab, Gatesmark Publishing, 2009
10.K. Kushi, M. Bakshi, and J. Kurnal, “Smart Traffic Light system using Image Processing”, International
Conference on current trends in Communication, 2017
11. Rahishet, Aparajita Sahoo, Aparna Indore, Vaibhav Deshmukh, Pushpa U.S, Department of Electronics and
Telecommunications Engineering, Fr. C Rodrigues Institute of Technology, Vashi “Intelligent Traffic Light Control Using Image Processing”, Proceedings of 21st IRF International Conference, Pune, India, ISBN:
978-93-82702-75-7, 8th March 2015.
12.Umar Farooq, Hafiz Muhammad Atiq, Muhammad Usman Asad, Asim Iqbal, Zeeshan Azmat, Department of
Electrical Engineering University of The Punjab, Lahore, Pakistan “Design and Development of an Image Processing Based Adaptive Traffic Control System with GSM Interface”, 978-0-7695- 3944-7/10 © 2010 IEEE
DOI 10.1109/ICMV.2009.65.
13. Ankita Panda, Ankit Naik, Purushottam Patel Student,CSE, Kirodimal Institute of Technology, Raigarh,India
Lecturer CSE, Kirodimal Institute of Technology, Raigarh,India HOD CSE, Kirodimal Institute of Technology,