R E S E A R C H
Open Access
Mathematical programming with multiple
sets split monotone variational inclusion
constraints
Zenn-Tsun Yu
1, Lai-Jiu Lin
2*and Chih-Sheng Chuang
3*Correspondence:
2Department of Mathematics,
National Changhua University of Education, Changhua, 50058, Taiwan
Full list of author information is available at the end of the article
Abstract
In this paper, we first study a hierarchical problem of Baillon’s type, and we study a strong convergence theorem of this problem. For the special case of this
convergence theorem, we obtain a strong convergence theorem for the ergodic theorem of Baillon’s type. Our result of the ergodic theorem of Baillon’s type improves and generalizes many existence theorems of this type of problem. Two numerical examples are given to demonstrate our results.
As applications of our convergence theorem of the hierarchical problem, we study the unique solution for the following problems: mathematical programming with multiply sets split variational inclusion and fixed point set constraints; mathematical programming with multiple sets split variational inequalities and fixed point set constraints; the variational inequality problem with a system of mixed type equilibria and fixed point set constraints; the variational inequality problem with multiple sets split system of mixed type equilibria and fixed point set constraints; mathematical programming with a system of mixed type equilibria and fixed point set constraints. We give iteration processes for these types of problems and establish the strong convergence for the unique solution of these problems. For our special case, our results can be reduced to the following problems: the unique minimal norm solution of the multiply sets split monotonic variational inclusion problems; the minimum norm solutions for the multiple sets split system of mixed type equilibria problem; the minimum norm solution of the system of mixed type equilibria problem. Our results will have many applications in diverse fields of science.
Keywords: hierarchical problems; split variational inclusion problems; fixed point problems; mathematical programming; minimum norm solution
1 Introduction
LetC,C, . . . ,Cm be nonempty closed convex subsets of a Hilbert spaceH. The
well-known convex feasiblity problem (CFP) is to findx∗∈Hsuch that
x∗∈C∩C∩ · · · ∩Cm.
The split feasibility problem (SFP) is to find a point
x∗∈Csuch thatAx∗∈Q,
whereCis a nonempty closed convex subset of a Hilbert spaceH,Qis a nonempty closed
convex subset of a Hilbert spaceH, andA:H→His an operation. The split feasibility
problem (SFP) in the finite dimensional Hilbert spaces was first introduced by Censoret al. [] for modeling inverse problems which arise from phase retrievals and in medical image reconstruction. Since then, the convex feasibility problem and the split feasibility prob-lem (SFP) has received much attention due to its applications in signal processing, image reconstruction, approximation theory, control theory, biomedical engineering, commu-nications, and geophysics. For example, one can refer to [–] and related literature.
Let C,C, . . . ,Cm be nonempty closed convex subsets of a Hilbert space H, let
Q,Q, . . . ,Qn be nonempty closed convex setsH and letA,A, . . . ,Am:H→H be
linear operator operators. The well-known multiple sets split feasibility problem studied by Censoret al.[]. Xu [] and Lopezet al.[] (MSSFP) is to findx∗∈Hsuch that
x∗∈Cisuch thatAix∗∈Qi for alli= , , . . . ,m.
In , Moudafi [] introduced and studied the following split monotone variational inclusion (SMVI):
Findx¯∈Hsuch thatx¯∈(B+G)–, ()
and
¯
y=Ax¯∈Hsuch that¯y∈(B+G)–, ()
whereHandH are real Hilbert spaces,A:H→His a bounded linear operator,B:
H→HandB:H→Hare given operators,G:HHandG:HHare given
multivalued mappings.
Moudafi [] proved a weakly convergence theorem for the solution of the split monotone variational inclusion (SMVI) with an iteration process.
In , Maruyamaet al.[] proved the following ergodic theorem of Baillon’s type [].
Theorem .[] Let C be a nonempty closed convex subset of a real Hilbert space H, T:C→C be a-generalized hybrid mapping withFix(T)=∅and let PFix(T)be the metric
projection of HontoFix(T).Then,for any x∈C,
Snx:= n
n–
k=
Tkx
converges weakly to an element p ofFix(T),where p=limn→∞PFix(T)Tnx.
As applications of our convergence theorem of the hierarchical problem, we study the unique solution for the following problems: mathematical programming with multiply sets split variational inclusion and a fixed point set constraints; mathematical program-ming with multiple sets split variational inequalities and fixed point set constraints; the variational inequality problem with a system of mixed type equilibria and fixed point set constraints; the variational inequality problem with multiple sets split system of mixed type equilibria and a fixed point set constraints; mathematical programming with system of mixed type equilibrium and a fixed point set constraints. We give iteration processes for these types of problems and establish the strong convergence for the unique solution of these problems. For the special case of our results, our results can be reduced to the fol-lowing problems: the unique minimal norm solution of the multiply sets split monotonic variational inclusion problems; the minimum norm solutions for the multiple sets split system of mixed type equilibrium problem; the minimum norm solution of the system of the mixed type equilibria problem. Our results will have many applications in diverse fields of science.
2 Preliminaries
Throughout this paper, letNbe the set of positive integers and letRbe the set of real numbers,Hbe a (real) Hilbert space with inner product ·,·and norm · , respectively,
andCbe a nonempty closed convex subset ofH. We denote the strongly convergence
and the weak convergence of{xn}tox∈Hbyxn→xandxnx, respectively.
LetT :C→Hbe a mapping, and letFix(T) :={x∈C:Tx=x}denote the set of fixed
points ofT. A mappingT:C→His called
(i) a-generalized hybrid mapping [] if there existδ,δ,,∈Rsuch that
δTx–Ty+δTx–Ty+ ( –δ–δ)x–Ty
≤Tx–y+Tx–y+ ( ––)x–y
for allx,y∈C.
We know that the class of -generalized hybrid mapping contains the classes of nonexpan-sive mappings, nonspreading mappings, and a (α,β)-generalized hybrid [] in a Hilbert space. We give an example for a -generalized hybrid mapping.
Example .[] LetT: [, ]→Rbe defined as
Tx=
ifx∈[, ), ifx= .
ThenT is a -generalized hybrid mapping andFix(T) ={}. Proof Let==,δ=δ=.
Case : Ifx∈[, ),y= , thenTx=Tx= ,Ty= andx–Ty ≤. We know that
δTx–Ty
+δTx–Ty+ ( –δ–δ)x–Ty
=δ+δ+ ( –δ–δ)x–Ty
and
Tx–y+Tx–y+ ( ––)x–y
= + + ( ––)x–
≥+ ≥ + = .
Therefore,
δTx–Ty
+δTx–Ty+ ( –δ–δ)x–Ty
≤Tx–y
+Tx–y+ ( ––)x–y.
Case : Ifx∈[, ),y∈[, ), thenTx=Tx= ,Ty=Ty= . We know that
δTx–Ty
+δTx–Ty+ ( –δ–δ)x–Ty
= ( –δ–δ)x
=
≤Tx–y
+Tx–y+ ( ––)x–y.
Case : Ifx=y= , thenTx= ,Tx= ,Ty= ,Ty= . We know that
δTx–Ty+δTx–Ty+ ( –δ–δ)x–Ty
=δ+ ( –δ–δ)
= ( –δ) =
and
Tx–y
+Tx–y+ ( ––)x–y
= +≥
.
Therefore,
δTx–Ty+δTx–Ty+ ( –δ–δ)x–Ty
≤Tx–y+Tx–y+ ( ––)x–y.
By the above case, we know thatT is a -generalized hybrid.
A mappingV:H→His called
(i) strongly monotone if there existsγ¯> such that x–y,Vx–Vy ≥ ¯γx–yfor all
x,y∈H;
(ii) α-inverse-strongly monotone if x–y,Vx–Vy ≥αVx–Vyfor allx,y∈H and
We also know that ifV is aα-inverse-strongly monotone mapping and <λ≤α, then I–λV:C→His nonexpansive.
LetG:HHbe a multivalued mapping. The effective domain ofGis denoted by
D(G), that is,D(G) ={x∈H:Gx=∅}.
ThenG:HHis called
(i) a monotone operator onHif x–y,u–v ≥for allx,y∈D(G),u∈Gx, and
v∈Gy;
(ii) a maximal monotone operator onHifGis a monotone operator onHand its
graph is not properly contained in the graph of any other monotone operator onH.
Lemma .[] Let C be a nonempty closed convex subset of a real Hilbert space H.Let
T be a nonexpansive mapping of C into itself,and let{xn}be a sequence in C.If xnw andlimn→∞xn–Txn= ,then Tw=w.
In , Hojoet al.[] also gave an example for a -generalized hybrid mapping which is not a generalized hybrid mapping withFix(T) ={(, )}. We shall prove that this ex-ample for a -generalized hybrid mapping does not satisfy the demiclosed property as in Lemma ..
Example . LetA={x∈R:x ≤}andTA→Rbe defined as
Tx=
(, ) ifx∈A, x
x ifx∈R/A.
Hojoet al.[] showed thatT is a -generalized hybrid mapping, butT is not a gen-eralized hybrid mapping. Note that T does not have the demiclosed property. Indeed, there exists a sequence{xn} ∈Asuch thatxnwandlimn→∞xn–Txn= , butwin
R/Fix(T) =R/{(, )}.
Proof Letrn= +
n,xn= (rncosθ,rnsinθ) for alln∈N, thenxn→(cosθ,sinθ) andTxn= (cosθ,sinθ). We also haveTxn–xn=((rn– )cosθ, (rn– )sinθ)=rn– →, but
(cosθ,sinθ)= (, ).
Lemma .[] Let V:H→Hbe aγ¯-strongly monotone and L-Lipschitzian continuous
operator withγ¯> and L> .Letθ∈H,and V:H→Hsuch that Vx=Vx–θ.Then
Vis aγ¯-strongly monotone and L-Lipschitzian continuous mapping.Furthermore,there
is a unique fixed point zin C satisfying z=PC(z–Vz+θ).This point z∈C is also a
unique solution of the hierarchical variational inequality Vz–θ,q–z ≥,for all q∈C.
LetC be a nonempty subset of a real Hilbert spaceH. ThenT:C→H is a firmly
nonexpansive mapping ifTx–Ty≤ x–y–(I–T)x– (I–T)yfor everyx,y∈C, that is,Tx–Ty≤ x–y,Tx–Tyfor everyx,y∈C.
Lemma .[] Let Gbe a maximal monotone mapping on H.Let JrGbe the resolvent of Gdefined by JrG= (I+rG)–for each r> .Then the following holds:
|s–t| s
JG
s x–J G
t x,JsGx–x
≥JG
s x–J G
t x
for all s,t> and x∈H.In particular,
JG
s x–J G
t x≤
|s–t| s J
G
s x–x
for all s,t> and x∈H.
A mapping T :H→H is said to be averaged if T = ( –α)I+αS, whereα∈(, )
andS:H→His nonexpansive. In this case, we also say thatTisα-averaged. A firmly
nonexpansive mapping is-averaged.
Lemma .([, ]) Let C be a nonempty closed convex subset of a real Hilbert space H, and let T:C→C be a mapping.Then the following are satisfied:
(i) Tis nonexpansive if and only if the complement(I–T)is/-ism. (ii) IfSisυ-ism,then forγ > ,γSisυ/γ-ism.
(iii) Sis averaged if and only if the complementI–Sisυ-ism for someυ> /. (iv) IfSandT are both averaged,then the product(composite)STis averaged.
(v) If the mappings{Ti}n
i=are averaged and have a common fixed point,then
n
i=Fix(Ti) =Fix(T· · ·Tn).
Lemma .[] Let{an}be a sequence of real numbers such that there exists a subsequence
{ni}of{n}such that ani<ani+for all i∈N.Then there exists a nondecreasing sequence
{mk} ⊆Nsuch that mk→ ∞and the following properties are satisfied by all(sufficiently large)numbers k∈N:
amk ≤amk+ and ak≤amk+.
In fact,mk=max{j≤k:aj<aj+}.
Lemma .[] Let{an}n∈Nbe a sequence of nonnegative real numbers,{αn}a sequence of real numbers in[, ]with∞n=αn=∞,{un}a sequence of nonnegative real numbers with∞n=un<∞,{tn}a sequence of real numbers withlim suptn≤.Suppose that an+≤
( –αn)an+αntn+unfor each n∈N.Thenlimn→∞an= .
3 Convergence theorems of hierarchical problems
LetHbe a real Hilbert space and letCbe a nonempty closed convex subset ofH. For
eachi= , , andκi> , letFibe aκi-inverse-strongly monotone mapping ofCintoH. For
eachi= , , letGibe a maximal monotone mapping onHsuch that the domain ofGiis included inCand define the setG–
i asG–i ={x∈H: ∈Gix}. LetJλGn= (I+λnG)
–
andJG
rn = (I+rnG)– for eachn∈N,λn> andrn> . Let{θn} ⊂H be a sequence.
LetVbe aγ¯-strongly monotone andL-Lipschitzian continuous operator withγ¯> and L> . Throughout this paper, we use these notations and assumptions unless specified otherwise.
Theorem . Let T :C→H be a-generalized hybrid mapping withFix(T)∩(F+
G)–∩(F+G)–=∅.Takeμ∈Ras follows:
<μ<γ¯ L.
Let{xn} ⊂Hbe defined by ⎧
⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
x∈C chosen arbitrarily,
yn=JG
λn(I–λnF)J
G
rn (I–rnF)xn,
sn=nnk–=Tkyn,
xn+=αnxn+ ( –αn)(βnθn+ (I–βnV)sn)
(.)
for each n∈N,{λn} ⊂(,∞),{αn} ⊂(, ),{βn} ⊂(, ),and{rn} ⊂(,∞).Assume that: (i) <lim infn→∞αn≤lim supn→∞αn< ;
(ii) limn→∞βn= ,and
∞
n=βn=∞;
(iii) <a≤λn≤b< κ,and <a≤rn≤b< κ;
(iv) limn→∞θn=θfor someθ∈H.
Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩(F+G)–∩(F+G)–(x¯–Vx¯+θ).This pointx is also a¯
unique solution of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩(F+G)–∩(F+G)–.
Proof Take anyx¯∈Fix(T)∩(F+G)–∩(F+G)– and letx¯be fixed. Then we have ¯
x=JG
λn(I–λnF)x¯andx¯=J
G
rn (I–rnF)x. Let¯ un=JrGn(I–rnF)xn. For eachn∈N, by the same argument as the proof of Theorem . [], we have
un–x¯≤ xn–x¯–rn(κ–rn)Fxn–Fx¯≤ xn–x¯ ()
and
yn–x¯≤ un–x¯–λn(κ–λn)Fun–Fx¯≤ xn–x¯. ()
By equations () and (), we have
yn–x¯ ≤ un–x¯ ≤ xn–x¯.
SinceT is a -generalized hybrid mapping withFix(T)=∅, we know thatT is a quasi-nonexpansive, and
sn–x¯=
n
n–
k=
Tkyn–x¯
≤
n
n–
k=
Tkyn–x¯
≤ yn–x¯ ≤ un–x¯ ≤ xn–x¯. ()
By the same argument as in the proof of Theorem . [], we find that the sequence{xn} is bounded. Furthermore,{un},{zn},{yn}, and{sn}are bounded. We also have
xn+–xn≤( –αn)
βnθn–Vsn+sn–xn+ βnθn–Vsnsn–xn
and
xn+–x¯–xn–x¯+ ( –αn)αnsn–xn
≤( –αn)βn θn,xn–x¯– ( –αn)βnVsn,xn–x¯
+ ( –αn)βnθn–Vsn+ βnθn–Vsnsn–xn. ()
We will divide the proof into two cases.
Case : there exists a natural numberNsuch thatxn+–x¯ ≤ xn–x¯for eachn≥N. Therefore,limn→∞xn–x¯exists. Hence, it follows from equation (), (i), and (ii) that
lim
n→∞sn–xn= . ()
By equations (), (), (i), and (ii), we have
lim
n→∞xn+–xn= . ()
We also have
zn–sn ≤βnθn+ ( –βnV)sn–sn≤βnθn–Vsn. ()
By equation (), (iv), and (ii) we have
lim
n→∞zn–sn= . ()
By equations () and (),
lim
n→∞zn–xn= . ()
By the same argument as in the proof of Theorem . [], we have
lim
n→∞un–xn= ()
and
lim
n→∞yn–un= . ()
SinceFix(T)∩(F+G)–∩(F+G)– is a nonempty closed convex subset ofH, by
Lemma ., we can takex¯∈Fix(T)∩(F+G)–∩(F+G)– such that ¯
x=PFix(T)∩(F+G)–∩(F+G)–(x¯–Vx¯+θ).
This pointx¯is also a unique solution of the hierarchical variational inequality:
We shall show that
lim sup
n→∞
Vx¯–θ,zn–x¯ ≥.
Without loss of generality, there exists a subsequence{znk}of{zn}such that
znkw ()
for somew∈Hand
lim sup
n→∞
Vx¯–θ,zn–x¯= lim
k→∞
Vx¯–θ,znk–x¯
. ()
By equations () and (), we have
lim
n→∞un–zn=
andunkw. On the other hand, since <a≤λn≤b< κ, there exists a subsequence
{λnkj}of{λnk}such that{λnkj}converges to a numberλ¯ ∈[a,b]. By equation () and
Lemma ., we have
un
kj–J
G ¯
λ (I–λF¯ )unkj
≤unkj–JG
λ
nkj(I–λnkjF)unkj+J
G
λ
nkj(I–λF¯ )unkj–J
G ¯
λ (I–λF¯ )unkj
+JG
λnkj(I–λnkjF)unkj –JλGnkj (I–λF¯ )unkj
≤ unkj –ynkj+|λnkj–λ¯|Funkj
+| λnkj –λ¯|
¯
λ J G ¯
λ (I–λF¯ )unkj– (I–λF¯ )unkj→. ()
By equation (),unkj w, and Lemma .,w∈Fix(JG ¯
λ (I–λF)) = (F¯ +B)
–.
Since <a≤rn≤b< κ, there exists a subsequence{rnkj}of{rnk}such that{rnkj}
converges to a number r¯ ∈[a,b]. By the same argument as for equation (), we
have
xnkj–JG ¯
r (I–rF¯ )xnkj→. ()
By equation () andunkw, we havexnkw.
By equation (),xnkwand Lemma ., we havew∈Fix(J
G ¯
r (I–¯rF)) = (F+G)–.
SinceTis a -generalized hybrid mapping, there existδ,δ,,∈Rsuch that
δTx–Ty
+δTx–Ty+ ( –δ–δ)x–Ty
≤Tx–y
for allx,y∈C. ReplacingxbyTkynin equation (), we have, for ally∈Candk= , , . . . ,n,
δTk+yn–Ty
+δTk+yn–Ty
+ ( –δ–δ)Tkyn–Ty
≤Tk+yn–y
+Tk+yn–y
+ ( ––)Tkyn–y
≤Tk+yn–Ty
+Ty–y+ Tk+yn–Ty,Ty–y
+Tk+yn–Ty+Ty–y+
Tk+yn–Ty,Ty–y
+ ( ––)Tkyn–Ty+Ty–y+
Tkyn–Ty,Ty–y.
This implies that
≤(–δ)Tk+yn–Ty+Ty–y+
Tk+yn–Ty,Ty–y
+ (–δ)Tk+yn–Ty+
Tk+yn–Ty,Ty–y
+ (δ–+δ–)Tkyn–Ty
+ ( ––)
Tkyn–Ty,Ty–y
≤(–δ)Tk+yn–Ty–Tkyn–Ty
+ (–δ)Tk+yn–Ty
–Tkyn–Ty+Ty–y
+ Tkyn–Ty+
Tk+yn–Tkyn+
Tk+yn–Tkyn,Ty–y. ()
Summing up these inequalities () with respect tok= tok=n– and dividing byn, we have
≤(–δ) n T
n+y
n–Ty
+Tnyn–Ty
–Tyn–Ty–yn–Ty
+(–δ) n T
nyn–Ty
–yn–Ty
+Ty–y+ sn–Ty,Ty–y
+ n
Tn+yn+Tnyn–Tyn–yn
+
Tnyn–yn
,Ty–y. ()
Replacing nby nkj and let nkj → ∞. Then from equation (), (), and (), we have
snkj w, and
≤ Ty–y+ w–Ty,Ty–y.
Takingy=win the above inequality, we have
≤ Tw–w+ w–Tw,Tw–w=Tw–w– Tw–w= –Tw–w.
This implies thatw∈Fix(T). Hence,w∈Fix(T)∩(F+G)–∩(F+G)–. Therefore,
we have from equations () and ()
lim sup
n→∞
Vx¯–θ,zn–x¯
= lim
k→∞
Vx¯–θ,znk–x¯
By the same argument as the proof of Theorem . [], we have
xn+–x¯
≤ – ( –αn)βnτ
xn–x¯+ ( –αn)βnτ
βnτxn–x¯
+ θn–θ,zn–x¯
τ +
θ–Vx¯,zn–x¯
τ
. ()
By equations (), (), assumptions, and Lemma ., we know thatlimn→∞xn=x¯, where
¯
x=PFix(T)∩(F+G)–∩(F+G)–(x¯–Vx¯+θ).
Case : Suppose that there exists{ni}of{n}such thatxni–x¯ ≤ xni+–x¯for alli∈N.
By Lemma ., there exists a nondecreasing sequence{mj}inNsuch thatmj→ ∞and
xmj–x¯ ≤ xmj+–x¯ and xj–x¯ ≤ xmj+–x¯. ()
Hence, it follows from equations () and () that
( –αmj)αmjsmj–xmj
≤( –αmj)βmj θmj,xmj–x¯– ( –αmj)βmj Vsmj,xmj–x¯
+ ( –αmj)
β
mjθmj–Vsmj
+ β
mjθmj–Vsmjsmj–xmj
()
for eachj∈N. Hence, it follows from equation (), (i), and (ii) that
lim
j→∞smj–xmj= . ()
We show that
lim sup
j→∞ Vx¯–θ,zmj–x¯ ≥.
Without loss of generality, there exists a subsequence{zmjk}of{zmj}such thatzmjk w
for somew∈Hand
lim sup
j→∞
Vx¯–θ,zmj–x¯= lim
k→∞ Vx¯–θ,zmjk –x¯. ()
By a similar argument as in the proof of Case , we havew∈Fix(T)∩(F+G)–∩(F+
G)–. Therefore, we have from equations () and ()
lim sup
Following a similar argument as in the proof of Case , we have
xmj+–x¯
≤ – ( –αmj)βmjτ
xmj–x¯
+ ( –α
mj)(βmjτ)
xm
j–x¯
+ βmj( –αmj)θn–θ,zmj–x¯+ βmj( –αmj) θ–Vx¯,zmj–x¯. ()
Fromxmj–x¯ ≤ xmj+–x¯, we have
( –αmj)βmjτxmj–x¯
≤( –αmj)(βmjτ)
xm
j–x¯
+ β
mj( –αmj)θn–θ,zmj–x¯
+ βmj( –αmj)θ–Vx¯,zmj–x¯. ()
Since ( –αmj)βmj> , we have
τxmj–x¯
≤β
mjτxmj–x¯
+ θ
n–θ,zmj–x¯+ θ–Vx¯,zmj–x¯. ()
By equations (), (), and the assumptions, we know that
lim
j→∞xmj–x¯= .
By (), (), and the assumptions, we know that
lim
j→∞xmj+–xmj= .
Thus, we have
lim
j→∞xmj+–x¯= . ()
By equations () and (),
lim
j→∞xj–x¯ ≤j→∞limxmj+–x¯= .
Thus, the proof is completed.
Remark .
(i) The assumptions, method, conclusion, and applications of Theorem . are different from Theorem . in [] and []. In Theorem ., Lemma . is used to prove the result, but in [] and [] we did not use this lemma.
(ii) The assumptions, method, and conclusion of Theorem . are different from Theorem . []. In Theorem . [],Tis a quasi-nonexpansive with the
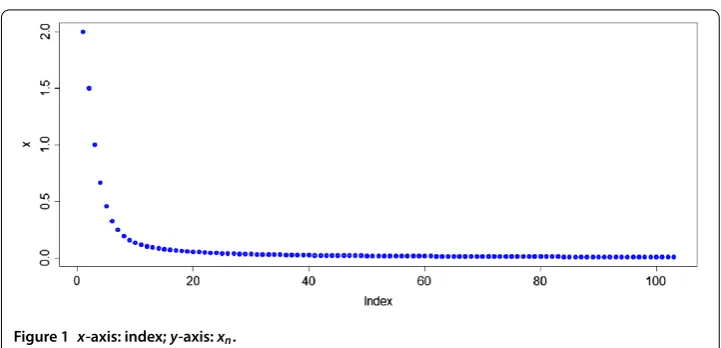
Figure 1 x-axis: index;y-axis:xn.
Example . LetT be the same as Example .. Letαn= /, βn= /n,θn= ,Vx=x,
Gx=Fx= x, Gx=Fx= x, rn= /, λn= /. Then V, G, G, F, F satisfy all
conditions of Theorem . andFix(T)∩(F+G)–∩(F+G)– ={}, and if we let
x= ., we see the following numerical results and graph (see Figure )
demon-strating Theorem .:
n= – . . . . . n= – . . . . . n= – . . . . . . . .
Besides, we know the following.
If|xn–xn–|< –, thenn= ; if|xn–xn–|< –, thenn= ; if|xn–xn–|< –,
thenn= ; if|xn–xn–|< –, thenn= ,.
Fori= , , letFi= ,Gi=∂iC, andλn=rn= for alln∈Nin Theorem .. Furthermore, putθn=θ, andV(x) =xfor allx∈H; we obtain the following theorem which generalizes
Theorem . in [].
Theorem . Let T:C→Hbe a-generalized hybrid mapping such that F(T)=∅.Let
θ∈C,and{xn} ⊂C be defined by
⎧ ⎪ ⎨ ⎪ ⎩
x∈C chosen arbitrarily,
sn=nnk–=Tkxn,
xn+=αnxn+ ( –αn)(βnθ+ ( –βn)sn)
(.)
for each n ∈ N, {αn} ⊂ (, ), and {βn} ⊂ (, ). Assume that < lim infn→∞αn ≤
lim supn→∞αn< and limn→∞βn= , and
∞
n=βn =∞. Then limn→∞xn=x,¯ where
¯
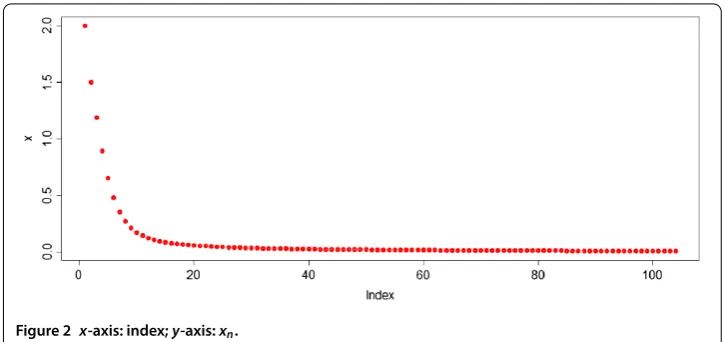
Figure 2 x-axis: index;y-axis:xn.
Example . LetT be the same as Example .. Letαn= /,βn= /n,θ = . Then the following numerical results and graph (see Figure ) demonstrate Theorem .:
n= – . . . . . n= – . . . . . n= – . . . . . n= – . . . . .
Besides, we know the following.
If|xn–xn–|< –, thenn= ; if|xn–xn–|< –, thenn= ; if|xn–xn–|< –,
thenn= ; if|xn–xn–|< –, thenn= ,.
4 Mathematical programming with multiple sets split feasibility constraints
LetHbe a Hilbert space, letf be a proper lower semicontinuous convex function ofH
into (–∞,∞). The subdifferential∂f off is defined as follows:
∂f(x) =z∈H:f(x) + z,y–x ≤f(y),∀y∈H
for allx∈H. From Rockafellar [], we know that∂f is a maximal monotone operator. Let
Cbe a nonempty closed convex subset of a real Hilbert spaceH, andiCbe the indicator
function ofC,i.e.
iCx=
ifx∈C,
∞ ifx∈/C.
Furthermore, we also define the normal coneNCuofCatuas follows:
NCu=
z∈H: z,v–u ≤,∀v∈C
.
TheniCis a proper lower semicontinuous convex function onH, and the subdifferential ∂iC ofiC is a maximal monotone operator. Thus, we can define the resolventJ∂iC
λ of∂iC forλ> ,i.e.
J∂iC
for allx∈H. Since
∂iCx=
z∈H:iCx+ z,y–x ≤iCy,∀y∈H
=z∈H: z,y–x ≤,∀y∈C
=NCx
for allx∈C, we have
u=J∂iC
λ x ⇔ x∈u+λ∂iCu ⇔ x–u∈λNCu
⇔ x–u,y–u ≤, ∀y∈C
⇔ u=PCx. ()
The equilibrium problem is to findz∈Csuch that
g(z,y)≥ for eachy∈C. (EP)
The solutions set of the equilibrium problem (EP) is denoted byEP(g). For solving the equilibrium problem, let us assume that the bifunctiong:C×C→Rsatisfies the follow-ing conditions:
(A) g(x,x) = for eachx∈C;
(A) gis monotone,i.e.,g(x,y) +g(y,x)≤for anyx,y∈C; (A) for eachx,y,z∈C,limt↓g(tz+ ( –t)x,y)≤g(x,y);
(A) for eachx∈C, the scalar functiony→g(x,y)is convex and lower semicontinuous.
Lemma .[, ] Let g:C×C→Rbe a bifunction which satisfies conditions(A)-(A). Let r> and x∈C.Then there exists z∈C such that
g(z,y) +
r y–z,z–x ≥ for all y∈C.
Furthermore,if
Trg(x) :=
z∈C:g(z,y) +
r y–z,z–x ≥for all y∈C
,
then we have:
(i) Trg is single-valued;
(ii) Trg is a firmly nonexpansive mapping; (iii) EP(g)is a closed convex subset ofC; (iv) EP(g) =Fix(Trg).
We call such Trg the resolvent ofg forr> . Throughout these section, we use these notations and assumptions unless specified otherwise.
Lemma .[] Let g:C×C→Rbe a bifunction satisfying the conditions(A)-(A). Define Agas follows:
Agx=
{z∈H:g(x,y)≥ y–x,z,∀y∈C} if x∈C;
∅ if x∈/C. (L.)
Then,EP(g) =A–
g and Agis a maximal monotone operator with the domain of Ag⊂C. Furthermore,for any x∈H and r> ,the resolvent Trg of g coincides with the resolvent of Ag,i.e.,Trgx= (I+rAg)–x.
LetC,Q, andQbe nonempty closed convex subsets of real Hilbert spacesH,H, and
H, respectively, letGibe a maximal monotone mapping onHsuch that the domains of
Gi is included inCfor each i= , . LetJG
λ = (I+λG)–andJrG= (I+rG)–for each
λ> andr> , letLbe aκ-inverse-strongly monotone mapping ofCintoH, let L
be aκ-inverse-strongly monotone mapping ofC intoH, letBbe aν-inverse-strongly
monotone mapping ofQintoH and letBbe aν-inverse-strongly monotone mapping
ofQintoH. LetGbe a maximal monotone mappings onHsuch that the domain ofG
is included inQand letGbe maximal a monotone mappings onHsuch that the domain
ofGis included inQ. LetJG
λ= (I+λG)
–andJG
r = (I+rG)
–for eachλ> andr> .
LetA,A:H →H be bounded linear operators,A∗ andA∗ the adjoints of A andA
respectively,A:H→Ha bounded linear operator, andA∗the adjoint ofA. LetRibe
the spectral radius of the operatorA∗iAifori= , , respectively, andRthe spectral radius of the operatorA∗A. LetI,I,Ibe the identity mappings ofH,H,H, respectively. We
use these notations throughout this section unless specified otherwise.
In order to study the convergence theorems for the solutions set of the multiple sets split monotone variational inclusion problem, we study the following essential problem (SFP-):
Findx¯∈Hsuch thatAx¯∈(G+B)–().
Theorem . Given anyx¯∈Hwe have the following.
(i) Ifx¯is a solution of(SFP-),then(I–λA∗(I–U)A)x¯=x¯,whereλ> ,
U=JG
σ(I–σB)andσ> .
(ii) Suppose thatU=JG
σ(I–σB), <λ<R, <σ< ν.ThenA∗(I–U)Ais aκR-ism mapping,JG
σ(I–σB),andI–λA∗(I–U)Aare averaged for someκ>.Suppose further that solution set of(SFP-)is nonempty and(I–λA∗(I–U)A)x¯=x¯.Thenx¯ is a solution of(SFP-).
Proof (i) Suppose thatx¯∈His a solution of (SFP-). Thenx¯∈H,Ax¯∈Fix(U). It is easy
to see that (I–λA∗(I–U)A)x¯=x.¯
(ii) Since the solutions set of (SFP-) is nonempty, there existsw¯ ∈H such thatAw¯ ∈
F(U). SinceBis aν-inverse-strongly monotone mapping ofQinto H, it follows from
Lemma .(iii) and (iv) that
By Lemma .(iii), for someκ>, we know that
I–U=I–JσG(I–σB) isκ-ism. ()
In Theorem . [], Moudafi showed that
A∗(I–U)Ais
κ
R-ism. ()
By Lemma .(iii) and <λ<R, we know that
I–λA∗(I–U)Ais averaged ()
for someκ>. Since
¯
x=I–λA∗(I–U)A
¯
x. ()
This implies
A∗(I–U)Ax¯= . ()
We know thatU(Ax) =¯ Ax+¯ w, withA∗w= , which combined with the fact thatU(Aw) =¯
Aw¯ yields
U(Ax) –¯ U(Aw)¯ =Ax¯+w–Aw¯=Ax¯–Aw¯+w. ()
SinceU=JσG(I–σB) is a nonexpansive mapping and we have equation (), we have
w= .
This implies that
Ax¯=Fix(U) =FixJσG(I–σB)
. ()
This shows thatx¯is a solution of (SFP-).
In the following theorem, we consider the multiple set split monotonic variational in-clusion problem (MSSMVIP-):
Findx¯∈Hsuch thatx¯∈G–()∩G– (),Ax¯∈(B+G)–(),
andAx¯∈
B+G–().
That is,
Findx¯∈Hsuch thatx¯∈Fix
JG
λ
∩FixJG
r
,Ax¯∈Fix(U) andAx¯∈Fix(U)
whereU=JσG(I–σB), U=JG
σ
I–σB
.
Theorem . Let T:C→Hbe a-generalized hybrid mapping.Suppose thatis the
solutions set of(MSSMVIP-)withFix(T)∩=∅.Takeμ∈Ras follows:
<μ<γ¯ L.
Let{xn} ⊂Hbe defined by
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
x∈C chosen arbitrarily,
yn=JG
λ (I–λA∗(I–U)A)JrG(I–rA∗(I–U)A)xn,
sn=nnk–=Tkyn,
xn+=αnxn+ ( –αn)(βnθn+ ( –βnV)sn),
(.)
where U=JσG(I–σB),U=JG
σ(I–σB),{αn} ⊂(, ),{βn} ⊂(, ),r∈(,∞)andλ∈ (,∞).We have
(i) <lim infn→∞αn≤lim supn→∞αn< ; (ii) limn→∞βn= ,and
∞
n=βn=∞; (iii) <λ<R
, <r<
R, <σ< νand <σ < ν;
(iv) limn→∞θn=θfor someθ∈H.
Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩(x¯–Vx¯+θ).This pointx is also a unique solution¯
of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
Proof LetF=A∗(I–U)A,F=A∗(I–U)A,λn=λandrn=rfor alln∈Nin Theo-rem .. It follow from TheoTheo-rem .(ii) thatFiis μi
Ri-ivm for someμi>
and eachi= , .
Then algorithm (.) in Theorem . follows immediately from algorithm (.) in Theo-rem ..
SinceFix(T)∩is nonempty, there existsw¯∈Csuch that ¯
w∈ Fix(T)∩FixJG
λ
∩FixI–λA∗(I–U)A
∩FixJG
r
∩FixI–rA∗(I–U)A
. ()
This implies that
¯
w∈ Fix(T)∩FixJG
λ
I–λA∗(I–U)A
∩FixJG
r
I–rA∗(I–U)A
. ()
That is,
¯
w∈Fix(T)∩FixJG
λ (I–λF)
∩FixJG
r (I–rF)
. ()
Hence,
¯
It follows from Theorem . thatlimn→∞xn=x, where¯ ¯
x=PFix(T)∩(F+G)–∩(F+G)–(x¯–Vx¯+θ).
This pointx¯is also a unique solution of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩(F+G)–∩(F+G)–.
If
w∈Fix(T)∩(G+F)–∩(G+F)–. ()
By equations (), (), and (), we know that
w=Tw, w=JG
λ
I–λA∗(I–U)A
w, w=JG
r
I–rA∗(I–U)A
w. ()
By=∅, equation (), and Lemma .(v), we have
w=Tw, w=JG
λ w, w=
I–λA∗(I–U)A
w, w=JG
r w,
w=I–rA∗(I–U)A
w.
()
It follows from Theorem .(ii) thatwis a solution of (MSSMVIP-). Therefore,w∈
Fix(T)∩and
Fix(T)∩(G+F)–∩(G+F)–⊆Fix(T)∩.
Conversely, ifw∈Fix(T)∩, by equations (), (), (), and (), we know thatw∈
Fix(T)∩(G+F)–∩(G+F)– and
Fix(T)∩⊆Fix(T)∩(G+F)–∩(G+F)–.
Therefore,Fix(T)∩=Fix(T)∩(G+F)–∩(G+F)– and the proof is completed.
Remark . Moudafi [] studied a weak convergence theorem for the split monotone variational inclusion problem, while Theorem . is a strong convergence theorem for the multiply sets split monotone variational inclusion problem.
By Theorem ., we study the mathematical programming problem with (MSSMVIP-) and fixed point set constraints.
Theorem . In Theorem.,let h:C→Rbe a convex Gâteaux differential function with Gâteaux derivative V,and the assumption(iv)is replaced bylimn→∞θn= .Then
limn→∞xn=x,¯ where x¯=PFix(T)∩(x¯ –Vx).¯ This point x is also a unique solution of¯
the mathematical programming problem with(MSSMVIP-)and fixed point constraints:
Proof Letθ= in Theorem ., by Theorem ., we see that
Vx,¯ q–x¯ ≥, ∀q∈F(T)∩. ()
Sinceh:C→Ris a convex Gâteaux differential function with Gâteaux dirivitiveV, we obtain
Vx,¯ y–x¯=lim
t→
h(x¯+t(y–x)) –¯ h(x)¯ t
=lim
t→
h(( –t)x¯+ty) –h(x)¯ t
≤lim
t→
( –t)h(x) +¯ th(y) –h(x)¯ t
=h(y) –h(x)¯ ()
for ally∈C. By equations () and (), it is easy to see thath(x)¯ ≤h(q) for allq∈Fix(T)∩
.
If we puth(x) =xin Theorem ., thenV=I, and we have the following minimum norm of common solutions for (MSSMVIP-) andFix(T).
Theorem . In Theorem.,let the iteration process{xn+}be replaced by
xn+=αnxn+ ( –αn)
βnθn+ ( –βn)sn
, n∈N.
Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩().This pointx is also a unique minimum solu-¯
tion ofFix(T)∩:minx∈Fix(T)∩x.
The multiple sets split variational inequality problem (MSSMVIP-) is defined as fol-lows:
Findx¯∈Hsuch thatx¯∈G–()∩G– (), ()
and
B(Ax),¯ y–Ax¯
≥ for ally∈Q, ()
B(Ax),¯ y–Ax¯
≥ for ally∈Q. ()
That is,
Findx¯∈Hsuch thatx¯∈Fix
JG
λ
∩FixJG
r
()
and
Ax¯∈Fix
PQ(I–σB) and Ax¯∈Fix
PQI–σB. ()
Theorem . In Theorem ., let U =JσG(I –σB), U =JG
σ(I–σB)be replaced by U =PQ(I–σB), U=PQ(I –σB), respectively. Suppose that the set of solutions for
(MSSMVIP-)is andFix(T)∩=∅.Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩(x¯–
Vx¯+θ).This pointx is also a unique solution of the hierarchical variational inequality:¯
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
Proof LetG=∂iQandG=∂iQ in Theorem ., then, by equation (), we haveJσG(I– σB) =PQ(I–σB),JσG(I–σB) =PQ(I–σB). SinceFix(T)∩=∅, there existsw¯ ∈C
such that we can find
¯
w∈Hsuch thatw¯∈Fix
JG
λ
∩FixJG
r
()
and
Aw¯∈Fix
PQ(I–σB)
and Aw¯ ∈Fix
PQ
I–σB. ()
This implies that
Aw¯∈Fix
JσG(I–σB)
and Aw¯∈Fix
JσGI–σB. ()
Therefore,w¯∈Fix(T)∩=∅. It follows from Theorem . thatlimn→∞xn=x, where¯ x¯=
PFix(T)∩(x¯–Vx¯+θ). This pointx¯is also a unique solution of the hierarchical variational
inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
By equations (), (), and (),limn→∞xn=x, where¯ x¯=PFix(T)∩(x¯–Vx¯+θ). This
pointx¯is also a unique solution of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩. Remark . Censoret al.[] studied a weak convergence theorem for the split varia-tional inequalities problem with the addivaria-tional assumption, while Theorem . studies a strong convergence theorem for multiply sets split variational inequalities problem with-out this additional assumption.
By Theorem ., we study a mathematical programming problem with (MSSMVIP-) and fixed point set constraints.
Theorem . In Theorem.,let h:C→Rbe a convex Gâteaux differential function with Gâteaux derivative V,and the assumption(iv)is replaced bylimn→∞θn= .Then
limn→∞xn=x,¯ wherex¯=PFix(T)∩(x¯–Vx).¯ This pointx is also a unique solution of the¯
following mathematical programming problem with(MSSMVIP-)and fixed point con-straints:
min
x∈Fix(T)∩
Proof By Theorem . and following the same argument as in the proof of Theorem .,
we see that the proof is complete.
In the following theorem, we consider the following split monotonic variational inclu-sion problem (MSSMVIP-):
Findx¯∈Hsuch thatx¯∈G–(),x¯∈(G+F)–, andAx¯∈
B+G–().
That is,
Findx¯∈Hsuch thatx¯∈Fix
JG
λ (I–λF)
∩FixJG
r
, andAx¯∈Fix(U)
whereU=JG
σ
I–σB
.
Letbe the solutions set of (MSSMVIP-).
Theorem . Let T:C→Hbe a-generalized hybrid mapping.Suppose thatis the
solutions set of(MSSMVIP-)withFix(T)∩=∅.Takeμ∈Ras follows:
<μ<γ¯ L.
Let{xn} ⊂Hbe defined by
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩
x∈C chosen arbitrarily,
yn=JG
λ (I–λF)JrG(I–rA∗(I–U)A)xn,
sn=nnk–=Tkyn,
xn+=αnxn+ ( –αn)(βnθn+ ( –βnV)sn),
(.)
where U=JG
σ(I–σB),{αn} ⊂(, ),{βn} ⊂(, ),r∈(,∞)andλ∈(,∞). (i) <lim infn→∞αn≤lim supn→∞αn< ;
(ii) limn→∞βn= ,and∞n=βn=∞; (iii) <λ< κ, <r<R and <σ< ν;
(iv) limn→∞θn=θfor someθ∈H.
Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩(x¯–Vx¯+θ).This pointx is also a unique solution¯
of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
Proof LetF=A∗(I–U)A,λn=λandrn=rfor alln∈Nin Theorem .. It follows from Theorem .(ii) thatF is μRii-ivm for someμi>. Then algorithm (.) in Theorem . follows immediately from algorithm (.) in Theorem ..
SinceFix(T)∩is nonempty, there existsw¯∈Csuch that ¯
w∈Fix(T)∩FixJG
λ (I–λF)
∩FixJG
r
∩FixI–rA∗(I–U)A
. ()
This implies that
¯
w∈Fix(T)∩FixJG
λ (I–λF)
∩FixJG
r
I–rA∗(I–U)A
That is,
¯
w∈Fix(T)∩FixJG
λ (I–λF)
∩FixJG
r (I–rF)
. ()
Hence,
¯
w∈Fix(T)∩(G+F)–∩(G+F)–=∅. ()
It follows from Theorem . thatlimn→∞xn=x, where¯
¯
x=PFix(T)∩(F+G)–∩(F+G)–(x¯–Vx¯+θ).
This pointx¯is also a unique solution of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩(F+G)–∩(F+G)–.
If
w∈Fix(T)∩(G+F)–∩(G+F)–. ()
That is,
w=Tw, w=JG
λ (I–F)w and w=JrG
I–rA∗(I–U)A
w. ()
By=∅, equation () and Lemma .(v), we have
w=Tw, w=JG
λ (I–λF)w, w=J G
r w, w=
I–rA∗(I–U)A
w. ()
By=∅, equation (), and Theorem .(ii), we see thatwis a solution of (MSSMVIP-).
Therefore, w∈Fix(T)∩ and Fix(T)∩(G+F)–∩(G+F)–⊆Fix(T)∩.
Conversely, if w∈Fix(T)∩, by equations (), (), (), and (), we know that
w∈Fix(T)∩(G+F)–∩(G+F)– and
Fix(T)∩⊆Fix(T)∩(G+F)–∩(G+F)–.
Therefore,Fix(T)∩=Fix(T)∩(G+F)–∩(G+F)– and the proof is completed.
Remark . Theorem . also improve Theorem . [].
For eachi= , , letfi:C×C→Rbe a bifunction satisfying the conditions (A)-(A). The system of mixed type equilibria problem (MSSMVIP-) is defined as follows.
Findx¯∈Csuch thatf(x,¯ x) + x–x,¯ Fx¯ ≥ andf(x,¯ x) + x–x,¯ Fx¯ ≥
for allx∈C.
Theorem . Let T :C→H be a -generalized hybrid mapping.For each i= , ,let
fi:C×C→Rbe a bifunction satisfying the conditions(A)-(A),and J Af
λ ,J Af
r ,defined as Lemma..Suppose thatis the solutions set of(MSSMVIP-)with(Af+F)
–∩
(Af+F)–∩Fix(T)=∅.Let{xn} ⊂H be defined by ⎧
⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎩
x∈C chosen arbitrarily,
yn=J Af
λ (I–λF)J
Af
r (I–rF)xn, sn=nnk–=Tkyn,
xn+=αnxn+ ( –αn)(βnθn+ ( –βnV)sn),
(.)
where{αn} ⊂(, ),{βn} ⊂(, ),r∈(,∞)andλ∈(,∞).Assume that: (i) <lim infn→∞αn≤lim supn→∞αn< ;
(ii) limn→∞βn= ,and
∞
n=βn=∞; (iii) <a≤λ≤b< κ, <a≤r≤b<κ;
(iv) limn→∞θn=θfor someθ∈H.
Thenlimn→∞xn=x,¯ wherex¯=PFix(T)∩(x¯–Vx¯+θ).This pointx is also a unique solution¯
of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
Proof For eachi= , , letAfi be as in Lemma .. By Lemma ., we see thatAfi is a
maximal monotone operator with the domain ofAfi⊂C. Furthermore, for anyx∈Hand
r> , the resolventTfi
λ officoincides with the resolvent ofAfi,i.e.,
Tfi
λx= (I+λAfi)
–x. ()
Fori= , , letGi=Afiin Theorem .. By equation (), we have
Tfi
λx= (I+λAf) –x=JG
λ x, Trfx= (I+rAf) –x=JG
r x. ()
Then algorithm (.) in Theorem . follows immediately from algorithm (.) in Theo-rem ..
By equation (), we haveFix(Tf
λ) =A–f =Fix(J
Af
λ ) andFix(T f
r ) =A–f =Fix(J Af
r ). It follows from Theorem . thatlimn→∞xn=x, where¯
¯
x=PFix(T)∩(x¯–Vx¯+θ).
This pointx¯is also a unique solution of the hierarchical variational inequality:
Vx¯–θ,q–x¯ ≥, ∀q∈Fix(T)∩.
Herew∈(G+F)–∩(G+F)–. That is,w∈(Af+F)
–∩(Af +F)
–. That is,
w∈Fix(JAf
λ (I–λF))∩Fix(J
Af
r (I–rF)). That is,