R E S E A R C H
Open Access
Delay-lower-bound-based adaptive fuzzy
memory control for uncertain nonlinear
systems with state and input delays
Shuni Song
1*, Jingyi Liu
1and Dan Liu
2*Correspondence: [email protected]
1College of Sciences, Northeastern University, Shenyang, Liaoning 110819, P.R. China
Full list of author information is available at the end of the article
Abstract
This paper is concerned with the problem of adaptive fuzzy control for a class of uncertain nonlinear strict-feedback systems. The considered systems contain uncertain state delay and input delay simultaneously. By utilizing the mean value theorem, the unknown time-delayed functions related to all state variables are dealt with. A novel adaptive filter is designed to eliminate the effect of the time-varying input delay. Based on the backstepping technique, a delay-lower-bound-based adaptive fuzzy memory control scheme is developed. It is proved that the proposed adaptive memory control method can guarantee that all the signals in the
closed-loop system are bounded and the tracking error converges to a small neighborhood of the origin. A simulation example is given to demonstrate the effectiveness of the proposed control scheme.
Keywords: adaptive fuzzy memory control; nonlinear strict-feedback systems; mean value theorem; the backstepping technique
1 Introduction
Over the past decades, adaptive control has become a mature and well-established re-search area within control systems society. Especially, the adaptive backstepping con-trol technique as a powerful tool has received attractive attention for concon-trolling strict-feedback nonlinear systems. This technique has a number of advantages over the con-ventional approaches, such as dealing with those nonlinear systems without satisfying the matching condition, providing a promising way to improve the transient performance of adaptive systems by tuning the design parameters. Recently, various considerable and sig-nificant results on adaptive backstepping control for nonlinear systems have been reported in [–], and the references therein. Among them, [, –] investigated the adaptive back-stepping control technique for single-input and single-out (SISO) nonlinear systems, [, ] studied for multiple-input and multiple-output (MIMO) nonlinear systems. Recently, approximation-based adaptive fuzzy control has been developed to deal with the con-trol problem of nonlinear systems with unknown nonlinear functions [–]. Reference [] tried to consider a class of stochastic pure-feedback nonlinear systems with unknown hysteresis by utilizing adaptive fuzzy control method. Reference [] developed a fuzzy adaptive control approach for nonlinear systems with unknown control gain sign. The
backstepping control technique has become one of the most popular design methods for a large class of nonlinear systems. In [–], the adaptive fuzzy backstepping control method is applied to deal with switched nonlinear systems. Although the backstepping-based adaptive technique has been used widely and developed extensively, there exists the issue of ‘explosion of complexity’ in the design process. In order to avoid the problem, dy-namic surface control (DSC) technique was first introduced in []. The DSC technique was utilized to eliminate the problem of explosion of complexity by introducing a first-order filter at each step of the traditional backstepping approach [, ]. Among them, [] investigated adaptive dynamic surface control method for nonlinear systems with an unknown dead zone in pure feedback form. Reference [] proposed adaptive fuzzy back-stepping dynamic surface control for uncertain nonlinear systems based on filters. More recently, the DSC approach has been further developed in [, ].
Time delays are often found in various engineering systems, such as electrical networks, microwave oscillators, nuclear reactors,etc.It is well known that time delays may destroy the stability or affect the performance of control systems. Therefore, the investigation of the stability and control design of nonlinear time-delay systems is a challenging and meaningful issue, and has received a great deal of attention in the control community in recent years. In order to deal with the stability analysis and controller design for time-delay systems, the common methods for nonlinear systems are to construct the Lyapunov-Razumikhin functions [, ] or appropriate Lyapunov-Krasovskii functionals [–]. In [], the adaptive robust tracking control problem is considered for an Euler-Lagrange system possessing second-order dynamics. In [], an adaptive fuzzy predictive sliding mode control is presented for nonlinear systems with uncertain dynamics and unknown input delay. In [], the robust control problem is investigated for a class of uncertain T-S fuzzy systems. Then to improve the transient performance of adaptive systems by tuning the design parameters, by further combining appropriately Lyapunov-Krasovskii functionals with adaptive backstepping technique, adaptive control method is developed for uncertain nonlinear strict-feedback systems with time delays [–]. Reference [] has developed an observer-based adaptive fuzzy control scheme for a class of nonlinear time-delay systems, and [] tried to solve the time-delay problem in face of a class of per-turbed strict-feedback nonlinear systems. Among them, the main idea is to develop the adaptive memoryless controllers, which utilizes appropriately Lyapunov-Krasovskii func-tionals to compensate for the unknown time-delay terms []. Although much progress has been made for the time-delay systems in the adaptive control field, some challenging difficulties still remain. The main difficulties lie in two folds: First, how to develop adap-tive backstepping control scheme for nonlinear strict-feedback systems with time delays by relaxing the restrictions of the time-delayed functions with all state variables. Second, how to design adaptive memory-reliable controller with less conservative for a class of nonlinear delay systems.
per-formance than the memoryless case [, ]. Nevertheless, the memory control schemes are only developed for linear time-delay systems [, ]. To the best of our knowledge, there are few results for the case where an adaptive fuzzy memory controller is designed for uncertain nonlinear strict-feedback systems with state and input delays.
Motivated by the aforementioned observations, in this paper, the problem of adaptive fuzzy memory control is investigated for a class of uncertain nonlinear strict-feedback systems with state and input delays. Fuzzy logic systems are utilized to approximate the unknown nonlinear functions, and hyperbolic tangent function is introduced to avoid the controller singularity problem. Compared with the existing work, the main advantages of the proposed control scheme are as follows: (i) By using the mean value theorem, bound states are separated from delayed state functions. Based on delay-lower-bound states, a novel adaptive fuzzy memory controller is developed. In contrast with the previous memoryless control approach [, –], by exploiting the history information of states, therefore, the proposed controller is prone to be less conservative. (ii) Time-varying input delay is considered in this paper. By constructing a novel adaptive filter, the effects from input delay are compensated. Note that in existing results [–], the con-sidered delayed input is always time-invariant. Hence the concon-sidered systems in this paper are more general and more practical.
Utilizing the mean value theorem, the unknown time-delayed functions related to all state variables are dealt with. A novel adaptive filter is constructed to eliminate the effect of time-varying input delay. For the analysis of stability,a prioriknowledge of the bound on the control is put forward. Fuzzy logic systems are utilized to approximate the unknown nonlinear functions, and hyperbolic tangent function is introduced to avoid the controller singularity problem. Combining an adaptive control methodology with the backstepping technique, a delay-lower-bound-based adaptive fuzzy memory controller by considering the history information of states is designed. Finally, the proposed adaptive control scheme can guarantee that all the signals in the closed-loop system are bounded and the tracking error converges to a small neighborhood of the origin.
The paper is organized as follows. In Section , some preliminaries are presented and the problem is formulated. Adaptive fuzzy memory control design and stability analysis are given in Section . A simulation study for a practical example verifies the main results in Section . Finally, we conclude this paper in Section .
2 Preliminaries and problem statement 2.1 System description
Consider a class of uncertain nonlinear strict-feedback systems with state and input delays in the following form:
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ ˙
x=x+f(x) +h(x(t–τ)),
˙
xi=xi++fi(xi) +hi(xi(t–τi)), i= , . . . ,n– , ˙
xn=u(t–τ(t)) +fn(xn) +hn(xn(t–τn)),
y=x,
()
where x=xn = [x, . . . ,xn]T ∈Rn and y∈R are state vectors and the control output,
respectively. u(t–τ(t))∈R is the control input,τ(t) is the time-varying input delay.
the delayed state vectors,τiare unknown delays.fi(·) : Ri→R are the unknown smooth
nonlinear functions, and hi(·) : Ri→R are the unknown smooth nonlinear time-delay
functions satisfyinghi() = . Here states are assumed to be measurable because this
pa-per focuses on uncertain time delays in state and input.
The control objective presented in this paper will design an adaptive fuzzy memory controller to guarantee that all the signals in the closed-loop system are bounded and the tracking error converges to a small neighborhood of the origin.
To facilitate the control system design, the following assumptions are proposed.
Assumption Assume thatτi(i= , . . . ,n) are unknowns that satisfy
<τm≤τi≤τM, ()
whereτmandτM are constants.τm is the lower bound of the delay andτM is the upper
bound.
Assumption The input delay satisfies the following restrictions:
τ(t) =τ+τ(t), ()
where|τ(t)|<ς,τ(t) > ,τ > .τ is a known constant andςis an unknown small
con-stant.
Assumption The desired reference signalyrand its derivativesy˙r,¨yrare bounded,i.e.,
there exists a compact setY={(yr,y˙r,y¨r) :yr+y˙r+y¨r≤YR}, whereYRis a positive constant.
Assumption [] Assume thata prioriknowledge of the bound on the control is pro-posed and the finite integral of past control values is bounded by a known constant,i.e.,
t
t–τu(s)ds≤u.
Sincehi(i= , . . . ,n) are sufficiently smooth functions, one can obtain by using the mean
value theorem
hi
xi(t–τi)
=hi
xi(t–τm)
+Ni xi(t–τi) –xi(t–τm)
, ()
whereNi=∂h∂xi
i (xi∈(X)) is unknown constant matrix and satisfiesNi ≤Li, in which
Liis a well-known positive constant and(X) is a compact set. · denotes the -norm
of a vector. Thus, the system () can be rewritten as
⎧ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎩ ˙
x=x+f(x) +h(x(t–τm)) +N[x(t–τ) –x(t–τm)], ˙
xi=xi++fi(xi) +hi(xi(t–τm)) +Ni[xi(t–τi) –xi(t–τm)], = , . . . ,n– , ˙
xn=u(t–τ(t)) +fn(xn) +hn(xn(t–τm)) +Nn[xn(t–τn) –xn(t–τm)],
y=x.
()
2.2 Fuzzy logic systems
Due to the uncertainty of the considered system, the fuzzy logic system (FLS) is intro-duced. Construct a fuzzy logic system with the following form of If-then rules:
Ri: Ifx
wherex= [x, . . . ,xn]Tandyare the fuzzy logic system input and output, respectively. The
fuzzy setsFjiandBi, associated with the fuzzy functionsμ
Fji(xj) andμBi(y), respectively. ιis the rules number. Through the singleton function, the center average defuzzification and product inference [], the FLS can be formulated as
yx(t)= constantε> ,there exists an FLS such as
sup
x∈
f(x) –θTϕ(x)≤ε. ()
By Lemma , fuzzy logic systems are universal approximators,i.e., theycan approximate any smooth function on a compact set, thus we can assume that the nonlinear terms and the time-delay terms in () can be approximated by
ˆ
The system () can be rewritten as
⎧
2.3 Adaptive filter design
Construct a filter with adaptive parameter
ˆ
Remark Several results have been developed for input-delayed nonlinear systems with exact time-delayed knowledge [, ], but few results examine the time-varying input de-lay problem for uncertain nonlinear systems. The considered system in this paper is with time-varying input delay. The adaptive filter is designed with exact time-delayed knowl-edge, regardless of the effect of the time-varying input delay.
3 Control design and stability analysis 3.1 Adaptive fuzzy memory control design
In this section, an adaptive fuzzy memory control scheme is designed by combining the backstepping method with the DSC technique, which can guarantee that all the signals in the closed-loop system are bounded and the tracking error is as small as desired.
First of all, the changes of the coordinates are designed as follows:
S=y–yr,
whereSiis called error surface;xidis a state variable, which can be obtained through a
first-order filter on the intermediate control functionαi–andχiis called the output error
of the first-order filter. Define the first-order filter asρix˙id+xid=αi–, xid() =αi–(),
i= , . . . ,n.
Step : Consider the Lyapunov function candidate
V=
given later. The time derivative ofVis
=S S+χ+α+θfTϕ(x) +ε+θhTϕ
By using the Young inequality and the properties of norms, it follows that
Sε+Sδ≤S+
Choosing the nonnegative function as
V=er(τM–t)L
The time derivative ofVis
˙
V≤–rV+ erτMLx(t) –L x(t–τ) +x(t–τm)
. ()
By substituting (), () into (), one can obtain
˙ compensate for the singularity problem.
Design the intermediate control functionαas follows:
α= –cS–θˆfTϕ(x) –θˆhTϕ
Choose the adaptive laws as follows:
Substituting () and () into (), it follows that
Stepi(≤i≤n– ): Consider the Lyapunov function candidate
Vi=
later. The time derivative ofViis
˙
By using the Young inequality and the properties of norms, it follows that
Siεi+Siδi≤Si+
Choose the nonnegative function
Vi=eri(τM–t)Li
The time derivative ofViis
˙
Choose the intermediate control functionαiand the adaptive laws as follows:
whereHi= eriτMLi
Stepn– : Consider the Lyapunov function candidate
Vn–=
By using the Young inequality, the properties of the norms and Assumption , it follows that
of fuzzy-approximation-based global adaptive control in []. In this paper, for thea pri-oriknowledge of the bound on the control one is required to develop an adaptive control methodology.
Choosing the nonnegative function
Vn–=ern–(τM–t)Ln–
Design the intermediate control functionαn–as follows:
αn–= –cn–Sn––θˆfTn–ϕn–(xn–) –θˆ
Choose the adaptive laws as follows:
˙ˆ
Substituting (), ()-() into (), it follows that
˙
Stepn: Consider the Lyapunov functional candidate
=Sn –knφ+knx+u(t–τ) +θˆfTnϕn(xn) +θˆhTnϕn
Take the actual controluas follows:
u(t) = –cnSn+knφ–knx–θˆfnTϕn(xn) –θˆ
The adaptive laws are designed as
˙ˆ
By using the Young inequality, it follows that
–Snθ˜fTnϕn(xn) –Snθ˜
By substituting ()-() into (), one can obtain
˙
Take the Lyapunov function for a stability analysis in the form ofV=ni=Viand its time
derivative as
Based on Young’s inequality, it follows that
By substituting (), () into (), one can obtain
˙
From (), one can obtain
˙
For the proof of Theorem , the following lemma is introduced.
Lemma For≤j≤n– ,consider the set Gεby Gε={Sj||Sj|< .εj}.Then,for Sj∈/
Gεj,the inequality – tanh
(S
j/εj) < is satisfied.
Proof By following the same line as in the stability analysis of [], it can be shown that all the signals in the closed-loop systems are bounded, and the steady-state error can be
made arbitrarily small.
From the above design procedures and analysis, the following theorem is deduced.
Theorem Consider the system()consisting of the adaptive laws(), (), (), (),the virtual control(), (), (),and the actual controller().Under Assumptions-,by using the above design procedures,for the bounded initial conditions,the boundedness of all the signals in the closed-loop system can be guaranteed by the proposed control scheme and the tracking error can converge to a small neighborhood of the origin.
4 Simulation example
Example (Numerical examples) Consider the following uncertain nonlinear strict-feedback systems with state and input delays:
ness of the method in the presence of different uncertainties, two cases of the system will be considered.
Case :f(x) = .xe–.x
cos(x).xe–.xcos(x),f(x) =xsin
+x,h(x(t–τ)) = x(t–τ)
+x(t–τ),h(x(t–τ)) =
x(t–τ)sin(x)
+x(t–τ) .
Case :f(x) = .x,f(x) = .sin(x) + .cos(t),h(x(t–τ)) = .x(t–τ),h(x(t–
τ)) = .x(t–τ).
The given reference tracking signal isyr=sin(t). Choose the fuzzy membership
func-tions as
μFl
i(xi) =exp
–(xi– +l)
, l= , , , , .
Define the fuzzy basis functions as
ϕ,l(x) =
μFl
k=μFk
, ϕ,l(x,x) =
μFl
μFl
k=μFl
μFk
, l= , , , , .
We can construct intermediate control functionαas follows:
α= –cS–θˆfTϕ(x) –θˆhTϕ
x(t–τm)
+y˙r–
H
S
tanh
S
ε
,
the actual controluas follows:
u(t) = –cS+kφ–kx–θˆfTϕ(x) –θˆhTϕ
x(t–τm)
+x˙d–S,
and the adaptive laws as follows:
˙ˆ
θf=γfϕ(x)S–σfθˆf, θ˙ˆh=γhϕ
x(t–τm)
S–σhθˆh,
˙ˆ
θf=γfϕ(x)S–σfθˆf, θ˙ˆh=γhϕ
x(t–τm)
S–σhθˆh.
The initial conditions of states are chosen asx() = . andx() = ., and the others
initial values are chosen as zeros. Chooseτm= s,τM= s.
The simulation results are shown in Figures -.
Figure shows the response trajectories of the control outputy(state variablex) and
the desired reference tracking signalyr. As can be seen, the control outputycan track the
reference signalyrsatisfactorily in the presence of different uncertainties.
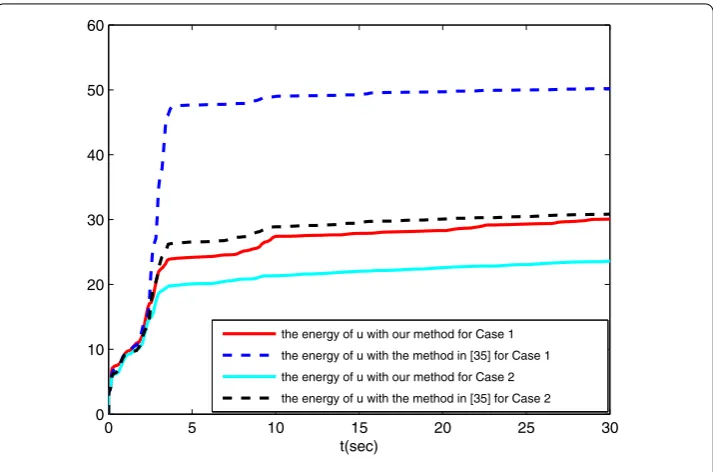
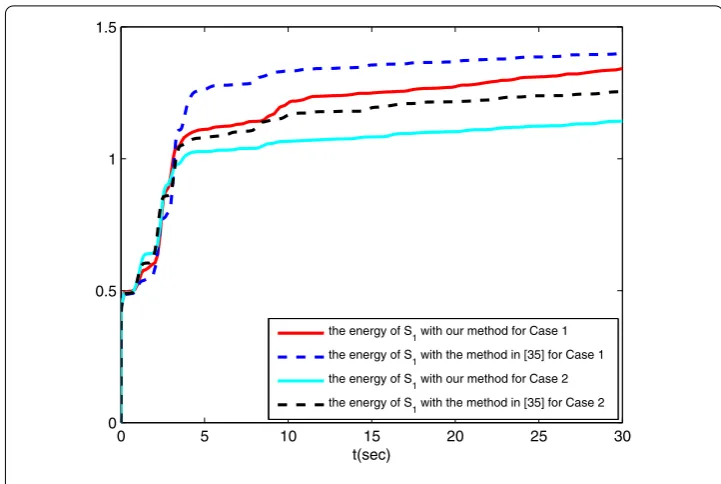
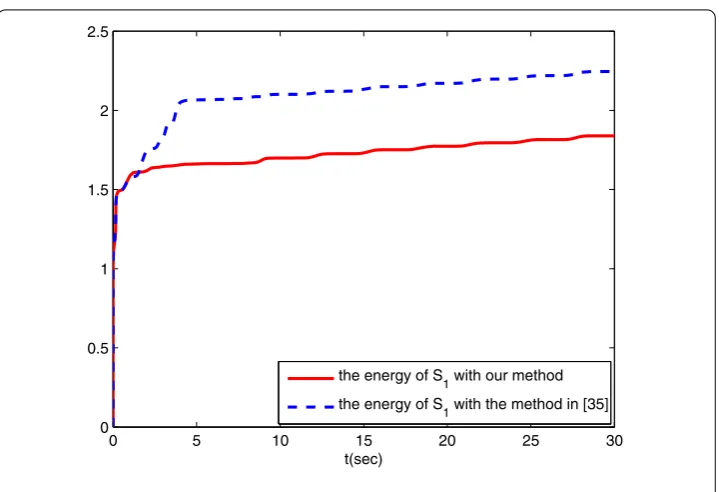
To illustrate the merits of the proposed method, some simulation results are given for the adaptive memoryless control scheme in []. The control input signalsuwith our control and the method in [] are shown in Figure and the energy of the control inputsuare shown in Figure . Figures and show the trajectories of the tracking errorS and the
trajectory of the energy of the tracking errorS, respectively. It is obvious that the tracking
error converges to a small neighborhood of the origin, and our proposed memory control methodology does achieve a better performance and requires less control energy than the method in [].
Figure 1 The trajectories ofyandyr.
Figure 2 The trajectory of controlu.
and show the trajectory of the tracking errorSand controluwithout compensating the
input delay, respectively. Obviously, the input delay can make the systems unstable.
Example (Practical example) Consider the following practical example of a two-stage
Figure 3 The trajectories of the energy ofu.
Figure 4 The trajectory ofS1.
input delay is time-varying, and the output isy=x. The system balance equation is
˙
x(t) = –
x(t) –ηx(t) +
–R
V
x(t) +h
x(t–τ)
,
˙
x(t) = –
x(t) –ηx(t) +
R
V
x(t–τ) +
F
V
ut–τ(t)
+h
x(t–τ)
Figure 5 The trajectories of the energy ofS1.
Figure 6 The trajectory ofS1without compensating input delay.
wherex(t) andx(t) are the compositions,iare the reactor residence times,ηiare the
reaction constants,F is the feed rate, Ri are the recycle flow rates andVi are reactor
volumes, the functionshi(t) are uncertain nonlinear functions with time delay. The
pa-rameters are taken from []:i= ,ηi= .,Ri= .,Vi= .,F= ., the nonlinear
time-delay functions are selected ash= .sintx(t–τ),h= .sintx(t–τ) withτ,τ
Figure 7 The trajectories ofuwithout compensating input delay.
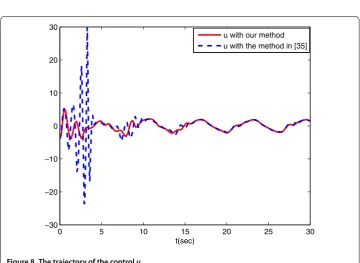
Figure 8 The trajectory of the controlu.
given reference tracking signal isyr=sin(t). We set the control parametersk= ,k= ,
ρ= .,c= .,c= ,γf=γf=γh=γh= ,σf=σf=σh=σh= ,ε= ,r= .,
L= .,τ= . s.
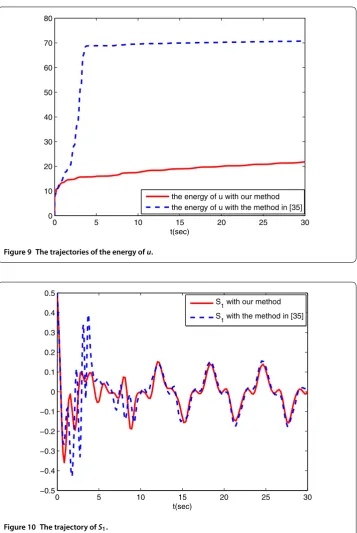
Figure 9 The trajectories of the energy ofu.
Figure 10 The trajectory ofS1.
5 Conclusion
de-Figure 11 The trajectories of the energy ofS1.
signed. It is analyzed that the proposed control scheme guarantees that all the signals in the closed-loop system are bounded and the tracking error converges to a small neigh-borhood of the origin. A practical simulation example also demonstrates the theoret-ical results. Further investigation should include more practtheoret-ical and general systems such as large-scale nonlinear systems and pure-feedback systems, and discrete-time sys-tems.
Competing interests
The authors declare that they have no competing interests.
Authors’ contributions
All authors contributed equally to the writing of this paper. All authors read and approved the final manuscript.
Author details
1College of Sciences, Northeastern University, Shenyang, Liaoning 110819, P.R. China.2College of Information Science and Engineering, Northeastern University, Shenyang, Liaoning 110819, P.R. China.
Received: 28 May 2016 Accepted: 19 September 2016
References
1. Yu, Y, Zhong, YS: Robust backstepping output tracking control for SISO uncertain nonlinear systems with unknown virtual control coefficients. Int. J. Control83, 1182-1192 (2010)
2. Grinits, EV, Bottura, CP: Adaptive neural-based backstepping control of uncertain MIMO nonlinear systems. In: IJCNN ’06 International Joint Conference on Neural Networks, pp. 4468-4475. IEEE Press, New York (2006)
3. Chen, B, Lin, C, Liu, X, Liu, K: Adaptive fuzzy tracking control for a class of MIMO nonlinear systems in nonstrict-feedback form. IEEE Trans. Cybern.45, 2744-2755 (2015)
4. Liu, YJ, Tong, SC: Adaptive fuzzy control for a class of unknown nonlinear dynamical systems. Fuzzy Sets Syst.263, 49-70 (2015)
5. Zhai, D, An, L, Li, J Zhang, Q: Simplified filtering-based adaptive fuzzy dynamic surface control approach for non-linear strict-feedback systems. IET Control Theory Appl.10, 493-503 (2016)
6. Zhai, D, An, L, Li, J Zhang, Q: Adaptive fuzzy fault-tolerant control with guaranteed tracking performance for nonlinear strict-feedback systems. Fuzzy Sets Syst. (2015). doi:10.1016/j.fss.2015.10.006
7. Wang, F, Liu, Z, Zhang, Y, Chen, CLP: Adaptive fuzzy control for a class of stochastic pure-feedback nonlinear systems with unknown hysteresis. IEEE Trans. Fuzzy Syst.24, 140-152 (2016)
9. Zhai, D, Xi, C, An, L, Dong, J, Zhang, Q: Prescribed performance switched adaptive dynamic surface control of switched nonlinear systems with average dwell time. IEEE Trans. Syst. Man Cybern. Syst. (2016).
doi:10.1109/TSMC.2016.2571338
10. Zheng, X, Zhao, X, Li, R, Yin, Y: Adaptive neural tracking control for a class of switched uncertain nonlinear systems. Automatica168, 320-326 (2015)
11. Li, Y, Sui, S, Tong, S: Adaptive fuzzy control design for stochastic nonlinear switched systems with arbitrary switchings and unmodeled dynamics. IEEE Trans. Cybern. (2016). doi:10.1109/TCYB.2016.2518300
12. Li, Y, Tong, S: Adaptive fuzzy output-feedback stabilization control for a class of switched non-strict-feedback nonlinear systems. IEEE Trans. Cybern. (2016). doi:10.1109/TCYB.2016.2536628
13. Wang, D, Huang, J: Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans. Neural Netw.16, 195-202 (2005)
14. Zhang, TP, Ge, SS: Adaptive dynamic surface control of nonlinear systems with unknown dead zone in pure feedback form. Automatica44, 1895-1903 (2008)
15. Li, Y, Li, T, Tong, S: Adaptive fuzzy output feedback dynamic surface control of interconnected nonlinear pure-feedback systems. IEEE Trans. Cybern.14, 138-149 (2015)
16. Yoo, SJ: Adaptive-observer-based dynamic surface tracking of a class of mobile robots with nonlinear dynamics considering unknown wheel slippage. Nonlinear Dyn.81, 1611-1622 (2015)
17. Liu, YJ, Tang, L, Tong, SC, Chen, CLP: Adaptive NN controller design for a class of nonlinear MIMO discrete-time systems. IEEE Trans. Neural Netw. Learn. Syst.26, 1007-1018 (2015)
18. Cao, YY, Frank, PM: Stability analysis and synthesis of nonlinear time-delay systems via linear Takagi-Sugeno fuzzy models. Fuzzy Sets Syst.124, 213-229 (2001)
19. Jankovic, M: Control Lyapunov-Razumikhin function and robust stabilization of time-delay systems. IEEE Trans. Autom. Control46, 1048-1060 (2001)
20. Mahboobi Esfanjani, R, Nikravesh, SKY: Stabilising predictive control of nonlinear time-delay systems using control Lyapunov-Krasovskii functionals. IET Control Theory Appl.3, 1395-1400 (2009)
21. Kharitonov, VL, Zhabko, AP: Lyapunov-Krasovskii approach to the robust stability analysis of time-delay systems. Automatica39, 15-20 (2003)
22. Zhai, D, Li, J, Zhang, Q: Fault detection for singular multiple time-delay systems with application to electrical circuit. J. Franklin Inst.351, 5411-5436 (2014)
23. Wang, YE, Sun, XM, Wu, BW: Lyapunov-Krasovskii functionals for switched nonlinear input delay systems under asynchronous switching. Automatica61, 126-133 (2015)
24. Li, Y, Tong, S, Li, T: Hybrid fuzzy adaptive output feedback control design for uncertain MIMO nonlinear systems with time-varying delays and input saturation. IEEE Trans. Fuzzy Syst.24, 841-853 (2016)
25. Roy, S, Kar, IN: Adaptive robust tracking control of a class of nonlinear systems with input delay, Nonlinear Dyn.85, 1127-1139 (2016)
26. Khazaee, M, Markazi, AH, Omidi, E: Adaptive fuzzy predictive sliding control of uncertain nonlinear systems with bound-known input delay, ISA Trans.59, 314-324 (2015)
27. Hua, CC, Wang, QG, Guan, XP: Robust adaptive controller design for nonlinear time-delay systems via T-S fuzzy approach. IEEE Trans. Fuzzy Syst.17, 901-909 (2015)
28. Yousef, HA, Hamdy, M, Wu, BW: Observer-based adaptive fuzzy control for a class of nonlinear time-delay systems. Int. J. Autom. Comput.10, 275-280 (2013)
29. Zhai, D, An, L, Li, J Zhang, Q: Delay-dependent adaptive dynamic surface control for nonlinear strict-feedback delayed systems with unknown dead zone. J. Franklin Inst.353, 279-302 (2016)
30. Wang, M, Chen, B, Shi, P: Adaptive neural control for a class of perturbed strict-feedback nonlinear time-delay systems. IEEE Trans. Syst. Man Cybern., Part B, Cybern.38, 721-730 (2008)
31. Yan, XG, Spurgeon, SK, Edwards, C: Memoryless static output feedback sliding mode control for nonlinear systems with delayed disturbances. IEEE Trans. Autom. Control59, 1906-1912 (2014)
32. Cacace, F, Conte, F, Germani, A: Memoryless approach to the LQ and LQG problems with variable input delay. IEEE Trans. Autom. Control61, 216-221 (2016)
33. Ye, D, Yang, GH: Adaptive reliableH∞control for linear time-delay systems via memory state feedback. IET Control Theory Appl.1, 713-721 (2007)
34. Azuma, T, Ikeda, K, Kondo, T, Uchida, K: Memory state feedback control synthesis for linear systems with time delay via a finite number of linear matrix inequalities. Comput. Electr. Eng.28, 217-228 (2002)
35. Park, JH, Kwon, O: On guaranteed cost control of neutral systems by retarded integral state feedback. Appl. Math. Comput.165, 393-404 (2005)
36. Wen, Y, Ren, X, Shi, P: Observer-based fuzzy adaptive control for non-linear time-varying delay systems with unknown control direction. IET Control Theory Appl.4, 2757-2769 (2010)
37. Yin, S, Shi, P, Yang, H: Adaptive fuzzy control of strict-feedback nonlinear time-delay systems with unmodeled dynamics. IEEE Trans. Cybern. (2015). doi:10.1109/TCYB.2015.2457894
38. Hua, C, Guan, X, Shi, P: Robust backstepping control for a class of time delayed systems. IEEE Trans. Autom. Control 50, 894-899 (2005)
39. Fischer, N, Dani, A, Sharma, N, Dixon, WE: Saturated control of an uncertain nonlinear system with input delay. Automatica49, 1741-1747 (2013)
40. Yousef, HA, Hamdy, M, Wu, BW, Abdesselem, B: Adaptive fuzzy backstepping tracking control for strict-feedback systems with input delay. IEEE Trans. Fuzzy Syst. (2016). doi:10.1109/TFUZZ.2016.2567457
41. Apostol, TM: Mathematical Analysis. Addison-Wesley, Reading (1963)
42. Wang, H, Chen, B, Liu, X, Liu, K, Lin, C: Robust adaptive fuzzy tracking control for pure-feedback stochastic nonlinear systems with input constraints. IEEE Trans. Cybern.43, 2093-2104 (2013)
43. Krstic, M: On compensating long actuator delays in nonlinear control. IEEE Trans. Autom. Control53, 1684-1688 (2008)
45. Wu, J, Chen, W, Li, J: Fuzzy-approximation-based global adaptive control for uncertain strict-feedback systems with a priori known tracking accuracy. Fuzzy Sets Syst.273, 1-25 (2015)