Stability of Equilibrium Points in Cellular Neural
Networks with Negative Slope Activation
Function
Qi HanSchool of Electrical and Information Engineering, Chongqing University of Science and Technology, Chongqing, China
Email: [email protected]
Qian Xiong, Chao Liu, Jun Peng, Lepeng Song and Sijing Liu
School of Electrical and Information Engineering, Chongqing University of Science and Technology, Chongqing, China
Abstract—In the paper, the region of the number of equilibrium points of every cell in cellular neural networks with negative slope activation function is considered by the relationship between parameters of cellular neural networks. Some sufficient conditions are obtained by using the relationship among connection weights. Three theorems and a corollary are gotten by our new methods. Depending on these sufficient conditions, inputs and outputs of a CNN, the regions of the values of parameters can be obtained. Some numerical simulations are presented to support the effectiveness of the theoretical analysis.
Index Terms—Cellular neural network; Equilibrium point; negative slope activation function
I. INTRODUCTION
Cellular neural networks (CNNs) were first introduced in 1988[1-2]. CNNs have extensively found application in various engineering fields, such as image processing, robotic and biological versions, higher brain functions, associative memories and so on [3-5].
It is easy to know that stability of CNNs play a important role for the application of CNNs. There have been abundant researches about stability of CNNs. Some sufficient conditions for CNNs to be stable were obtained by constructing Lyapunov Function [6-7], and these conditions generally made equilibrium point global asymptotically stable. However, some authors presented some conditions which made equilibrium points locally stable, and there generally were multiple equilibrium points [8-11]. In [8-9], the region of the number of equilibrium points of every cell in cellular neural networks is researched, however, the activation functions are the unity gain activation function and thresholding activation function, respectively. Therefore, in the paper, the region of the number of equilibrium points of every cell in cellular neural networks with negative slope activation function will be considered. If the activation function of CNNs is f x
( )
= −(
x+ − −1 x 1 2)
, we call the activation function as negative slope activation function.The remaining part of this paper is organized as
follows. In the next Section, some regions of the number of equilibrium points of CNNs are obtained. In Section III, some numerical simulations are given to verify the theoretical results. Some conclusions are finally drawn in Section IV.
II. MAIN RESULTS
Consider a two dimensional cellular neural networks defined by the following differential equations:
( )
( )
( ) ( )( )
( )
( ) ( )
2 2
1 1
2 2
1 1
, ,
, ( , ) ( , ) , ,
( , ) ( , )
,
, k i r l j r
ij ij ij kl i k j l ij
k k i r l l j r
k i r l j r
ij kl kl ij
k k i r l l j r
y t c y t a g y t
d u v
η
η
+ +
= =
= =
⎧
= − + +
⎪ ⎪ ⎨ ⎪
= +
⎪ ⎩
∑ ∑
∑ ∑
(1) where yij( )t ∈R denotes the states vector, cij is a
positive parameter, r is positive integer denoting neighborhood radius, A=
( )
akl (2 1 2 1r+ ×) ( r+)≠0 isintra-neuron connection weight matrix , D=
( )
dkl (2 1 2 1r+ ×) ( r+)is input cloning template, ukl is the input, vij is the bias,
( )
{
}
1 , max 1 , ,
k i r = − −i r k2
( )
i r, =min{
Ν − i r, ,}
( )
{
}
1 , min 1 , ,
l j r = − −j r l2
( )
j r, =max{
Μ −j, r}
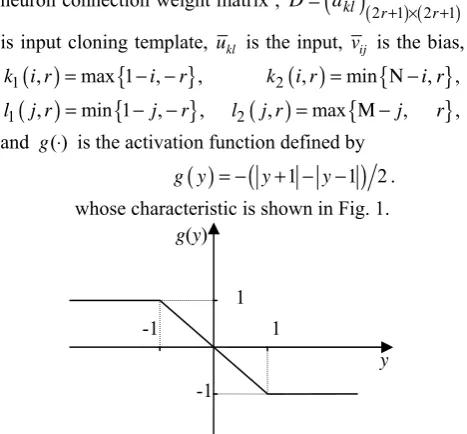
, and g( )⋅ is the activation function defined by( )
(
1 1 2)
g y = − y+ − −y . whose characteristic is shown in Fig. 1.
Fig. 1 Piecewise linear function f x t
( )
( ) —negative slope g(y)y 1
1 -1
Let r=1 and n= ×N M. If the system (1) has N rows and M columns, then it can be put in vector form as
( )
x= −Cx+Af x +DU+V , (2)
where
(
1 2, , ,)
T(
11 12, , 1, , ,)
Tn M NM
x= x x " x = y y "y " y , coefficient matrices A andDare obtained through the
templatesAandD, C=diag c
(
1"cn)
, the input vector(
1,..., n)
TU = u u , V =
(
v1,...,vn)
T and( )
(
( )
1 ,...,( )
n)
Tf x = g y g y . The kth cell in Eq. (2) is denoted by Οk(k=iN+ j, where 1≤ ≤i N, 1≤ ≤j M , i denotes ith row and j denotes jth column of the CNN). The matrix A=
( )
aij n n× , defined by (2), composed of template has the form1 2
3 1 2
3 1 2
3 1
1 2
3 1
0 0 ... 0 0
0 ... 0 0
0 ... 0 0
0 0 ... 0 0
0 0 0 0 0
0 0 0 0 0 n n
A A
A A A
A A A
A A
A A A A ×
⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ # # # # % # # , 00 01
0, 1 00 01
0, 1 00 1
00 01
0, 1 00
0 0 0
0 0
0 0 0
0 0 0
0 0 0 M M
a a
a a a
a a A a a a a − − − × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ " " " # # # % # # " " , 10 11 1, 1 10 11
1, 1 10 2
10 11 1, 1 10
0 0 0
0 0
0 0 0
0 0 0
0 0 0
M M
a a
a a a
a a A a a a a − − − × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ " " " # # # % # # " " and 1,0 1,1 1, 1 1,0 1,1
1, 1 1,0 3
1,0 1,1
1, 1 1,0
0 0 0
0 0
0 0 0
0 0 0
0 0 0
M M
a a
a a a
a a A a a a a − − − − − − − − − − − − − − × ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ =⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ " " " # # # % # # " " .
The definition of matricesD
( )
dij n n×
= is similar toA.
System (2) can be written as
( )
, 1, ,i i i ii i i
x = −c x +a f x +w i = " n (3)
where
( )
1, 1
n n
i ij j ij j i
j j i j
w a f x d u v
= ≠ =
=
∑
+∑
+ . (4)In Eq. (3), if − ≤1 x ti
( )
≤1 , f x t(
i( )
)
= −x ti( )
. Therefore, when − ≤1 x ti( )
≤1 , Eq. (3) can be transformed as( )
(
) ( )
i i ii i i
x t = − c +a x t +w ;
if x ti
( )
≥1, we have f x t(
i( )
)
= −1. Therefore, when( )
1i
x t ≥ , Eq. (3) can be transformed as
( )
( )
i i i ii i
x t = −c x t −a +w ;
if x ti
( )
≤ −1, we have f x t(
i( )
)
=1. Therefore, when( )
1i
x t ≤ − , Eq. (3) can be transformed as
( )
( )
i i i ii i
x t = −c x t +a +w.
In Eq. (3), if x ti
( )
=1, we have( )
1i i ii i
x t = − −c a +w =R ,
and if x ti
( )
= −1, we have( )
2i i ii i
x t = +c a +w =R .
Suppose thatβiis equilibrium point of system (3), then we have
( )
0i i ii i i
cβ a f β w
− + + = . (5) Whenβi≤ −1 , we have f
( )
βi =1, and the Eq. (5) can be transformed as(
)
,i aii wi c ti
β = + ′ → ∞, (6) where
1, 1
n n
i ij ij j i
j j i j
w a d u v
= ≠ =
′ =
∑
± +∑
+ ; (7)Whenβi≥1 , we have f
( )
βi = −1, and the Eq. (5) can be transformed as(
)
,i aii wi c ti
β = − + ′ → ∞. (8) For simplicity, denote
1
n
i ij j
j d u ρ = =
∑
and 1, n i ijj j i
a ϑ
= ≠
=
∑
.Note 1. Let δ be the sum of a cell and the number of its
adjacent cells.
From above analysis about CNNs, we can get the following theorem.
Theorem 1. In Eq. (3), when aii< −ci,
(i) if vi >ρ ϑi+ − −i ci aii, then there exist only positive stable equilibrium points for cell Oi, and the number of these points is grater than or equal to 1 and less than or equal to 2δ−1 for cell
i
O;
(ii) if vi<aii+ −ci ρ ϑi− i, then there exist only negative stable equilibrium points for cell Oi, and the number of these points is grater than or equal to 1 and less than or equal to 2δ−1;
number of stable equilibrium points is greater than or equal to2and less than or equal to 2δ.
Proof. (i) From aii< −ci, we have R1>R2. In terms of
i i i i ii
v >ρ ϑ+ − −c a , we have R2>0. The x−x phase
plane trajectory of Eq. (1) is shown in Fig. 2.
Fig. 2 The x−x phase plane trajectory of Eq. (3), where R2>0
and aii< −ci
Therefore there exist positive stable equilibrium points for cell Oi. From Eq. (7) and (8) and R1>0, we know that the equilibrium point of Eq. (3) is
(
)
*
00 i i 1
x = a +w′ c ≥ .
Then, the number of different values of x* is equal to
that of wi′. If akl =0, for all
( ) ( )
k l, ≠ 0,0 , then the number of different values of wij′ is 1. If akl ≠0, for all( ) ( )
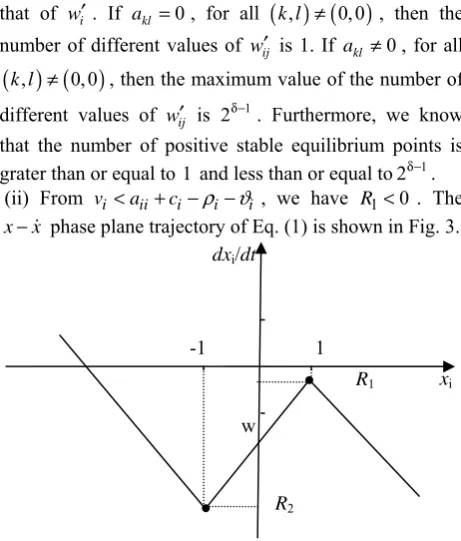
k l, ≠ 0,0 , then the maximum value of the number of different values of wij′ is 2δ−1. Furthermore, we know that the number of positive stable equilibrium points is grater than or equal to 1 and less than or equal to2δ−1.(ii) From vi <aii+ − −ci ρ ϑi i , we have R1<0 . The
x−x phase plane trajectory of Eq. (1) is shown in Fig. 3.
Fig. 3 The x−x phase plane trajectory of Eq. (1), where R1<0 and
ii i
a < −c .
There exist only negative stable equilibrium points for cell Oi, and the number of these points is grater than or equal to 1 and less than or equal to 2δ−1.
(iii) From vi ≥aii+ + +ci ϑ ρi i and
i ii i i i
v ≤ − − − −a c ϑ ρ , we have R1>0 and R2<0. The
x−x phase plane trajectory of Eq. (1) is shown in Fig. 4.
Fig. 4 The x−x phase plane trajectory of Eq. (1), where R1>0,
2 0
R < and aii< −ci.
Then, we can get our result.
Corollary 1. In Eq. (6), choose initial statex
( )
0 =0, andletaii< −ci,
(i) if
0
i i i
v − ρ − ϑ > ,
and
i ii i i i
v ≤ − − − −a c ϑ ρ
then there exist positive stable equilibrium points, and the number of these points is grater than or equal to 1 and less than or equal to 2δ−1;
(ii) if
0
i i i
v + ρ + ϑ <
and
i ii i i i
v ≥a + + +c ϑ ρ
then there exist negative stable equilibrium points, and the number of these points is grater than or equal to 1 and less than or equal to 2δ−1.
Theorem 2. In Eq. (6), when aii= −ci,
(i) if vi > ρ + ϑi i, then there exists only positive stable equilibrium points for cell Oi, and the number of these points is grater than or equal to 1 and less than or equal to
1
2δ− ;
(ii) if vi< ρ + ϑi i, then there exists only negative stable equilibrium points for cell Oi, and the number of these points is grater than or equal to 1 and less than or equal to
1
2δ− .
Theorem 3. In Eq. (6), whenaii> −ci,
(i) if vi≥ ϑ + ρi i, there exist not more than 2δ−1 positive stable equilibrium points for cell Oi , if
i i ii i i
v ≥ +c a + ϑ + ρ , stable equilibrium points are equal
or greater than 1 for cell Oij;
(ii) if vi ≤ ϑ + ρi i , there exist not more than
1
2δ−
negative stable equilibrium points for cell Oi , if
i i ii i i
v ≤ +c a − ϑ − ρ , stable equilibrium points are equal
or less than -1 for cell Oi. dxi/dt
xi
R1
1 -1
R2
w
dxi/dt
xi
R1
1 -1
R2
w dxi/dt
xi
R1
1 -1
R2
III. NUMERICAL EXAMPLE
In this section, some numerical simulations are given to verify the theoretical results. Consider a cellular neural network, and its cloning template A is as follows:
1, 1 1,0 1,1 0, 1 00 0,1 1, 1 1,0 1,1
a a a
A a a a
a a a
− − − −
− −
⎛ ⎞
⎜ ⎟
=⎜ ⎟
⎜ ⎟
⎝ ⎠
. (9)
Therefore, a CNN with 2 rows and 2 columns can be written as
( )
(
)
(
( )
)
( )
(
)
(
( )
)
( )
(
)
(
( )
)
( )
(
)
(
( )
)
( )
(
)
(
( )
)
( )
(
)
(
( )
)
11 11 11 00 11 0,1 12 1,0 21 11 22 11 12 12 12 0, 1 11 00 12 1, 1 21 1,0 22 12 21 21 21 1,0 11 1,1 12
00 21 0,1 22 21 22
,
,
,
x c x a f x t a f x t
a f x t a f x t
x c x a f x t a f x t
a f x t a f x t
x c x a f x t a f x t
a f x t a f x t
x
−
−
− −
= − + +
+ + + η
= − + +
+ + + η
= − + +
+ + + η
=
(
( )
)
(
( )
)
( )
(
)
(
( )
)
22 22 1, 1 11 1,0 12 0. 1 21 00 22 22,
c x a f x t a f x t
a f x t a f x t
− − −
−
⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎨ ⎪ ⎪ ⎪ ⎪
− + +
⎪
⎪ + + + η
⎪⎩
where
11 00 11 0,1 12 1,0 21 11 22 11 12 0, 1 11 00 12 1, 1 21 1,0 22 12
21 1,0 11 1,1 12 00 21 0,1 22 21 22 1, 1 11 1,0 12 0. 1 21 00 22 22
, , ,
.
d u d u d u d u v
d u d u d u d u v
d u d u d u d u v
d u d u d u d u v
− −
− −
− − − −
η = + + + +
⎧ ⎪
η = + + + +
⎪ ⎨
η = + + + +
⎪
⎪η = + + + +
⎩
In Fig. 5 (a) and (b), inputs and outputs of CNNs are shown, respectively, where the white lattice stands for -1 and black for 1.
Fig. 5 Inputs of CNNs are shown in (a), and outputs are shown in (b).
We are based on Corollary 1 to design a CNN. Choose
0.5 0.3 0.1
0.1 5.9 0.1
0.2 0.4 0.1
A
− − −
⎛ ⎞
⎜ ⎟
=⎜ − ⎟
⎜ ⎟
⎝ ⎠
, c11= =c12 c21=c22=1, and
0.3 0.1 0.1
0.2 0.2 0.2
0.2 0.4 0.1
D
− −
⎛ ⎞
⎜ ⎟
=⎜ ⎟
⎜ − ⎟
⎝ ⎠
.
Then, from inputs and outputs of CNNs in Fig. 6, we can get
11 12
2.3<v <2.6, − 2.6 <v < −2.3,
21 1.3, 1.7 22 3.2
v v
−3.6 < < − < < . Therefore , we choose
11 2.5, 12 2.4, 21 3, 22 3
v = v = − v = − v = .
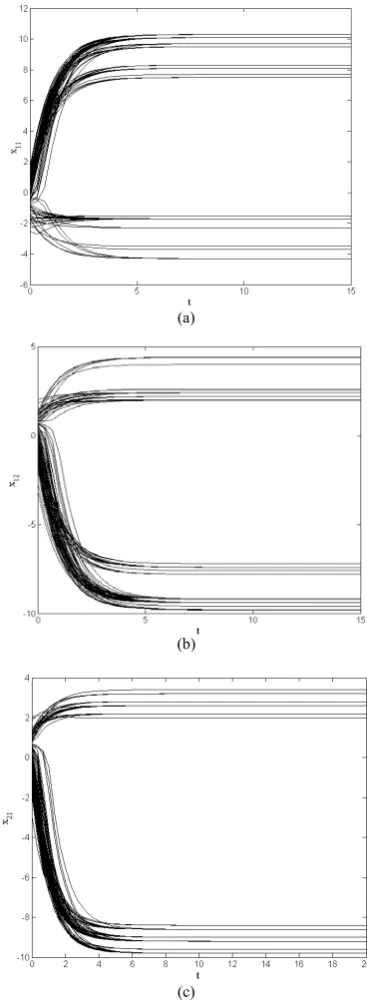
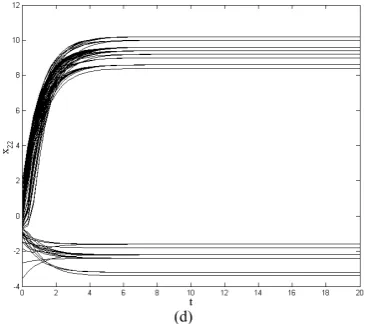
Furthermore, a CNN is obtained. Fig. 6 shows the number of equilibrium points, where all parameters of the CNN are based on Corollary 1 (iii), and 100 random
initial states are used. We can find that the number of equilibrium points is accord with Corollary 1.
IV. CONCLUSIONS
In the paper, the region of the number of equilibrium points of cellular neural networks was considered by the relationship between parameters of cellular neural networks with negative slope activation function. We find that there are no more than 3δisolated equilibrium points
or 2δ equilibrium points located in saturation regions for
a cell in a CNN. Finally, numerical simulations were presented to verify the theoretical results.
(a)
(b)
(d)
Fig. 6 The number of equilibrium points of every cell CNNs are shown,
where the number of different equilibrium points of every cell can be known.
ACKNOWLEDGMENT
This work was supported in part by Research Project of Chongqing University of Science and Technology(CK2013B15, CK2011Z17), in part by Teaching & Research Program of Chongqing Education Committee (KJ131401, KJ131416, KJ121505, KJzh11221), in part by the National Natural Science Foundation of China (61170249, 61003247), in part by the Natural Science Foundation project of CQCSTC ( cstc2011pt-gc70007, 2010BB2284, cstc2011jjA80022, cstc2011jjA40005, and in part by the First Batch of Supporting Program for University Excellent Talents in Chongqing.
REFERENCES
[1] L. O. Chua and L. Yang, Cellular neural networks: theory, IEEE Transactions Circuits Systems, 35:1257-1272, 1988. [2] L. O. Chua and L. Yang, Cellular neural networks:
applications, IEEE Transactions Circuits Systems, 35:1273-1290 1988.
[3] M. Itoh, L.O. Chua, Advanced image processing cellular neural networks, International Journal of Bifurcation and Chaos, 17: 1109-1150, 2007.
[4] Z. G. Zeng, and J. Wang, Associative memories based on continuous-time cellular neural networks designed using space-invariant cloning templates, Neural Networks, 22: 651-657, 2009.
[5] L. O. Chua and T. Roska, Cellular neural networks and visual computing, Cambridge: Cambridge University Press, 2002.
[6] S. P. Xiao and X. M. Zhang, New globally asymptotic stability criteria for delayed cellular neural networks, IEEE Transactions on Circuits and Systems—II: Express Briefs, 56: 659-663, 2009.
[7] C. J. Li, C. D. Li, X. F. Liao and T. W. Huang, Impulsive effects on stability of high-order BAM neural networks with time delays, Neurocomputing, 74: 1541-1550, 2011. [8] Q. Han, X. Liao, T. Weng, C. Li and H. Huang, Analysis
on equilibrium points of cells in cellular neural networks described using cloning templates, Neurocomputing, 89: 106-113, 2012.
[9] Q. Han, X. Liao, T. Weng, C. Li and Hongyu Huang, Analysis on equilibrium points of cellular neural networks
with thresholding activation function, Neural computing & Applications, Published online: 26 September 2012. [10]Q. Han, X. Liao and C. Li. Analysis of associative
memories based on stability of cellular neural networks with time delay. Neural Computing & Applications, Published online: 20 January 2012.
[11]Q. Han, X. Liao, T. Huang, J. Peng, C. Li and H. Huang. Analysis and design of associative memories based on stability of cellular neural networks. Neurocomputing, 97: 192-200, 2012.
Qi Han received the B.S. degree in
Computer Science and Technology from Shandong University (Weihai), China, in 2005. He received M.S. degree in Computer Software and Theory from Chongqing University, China, in 2009. He received PhD degree in Computer Science and Technology at Chongqing University of China in 2012. Now he is a Lecturer with School of Electrical and Information Engineering, Chongqing University of Science and Technology. His current research interest covers chaos control and synchronization, cellular automata, neural network, associative memories.
Qian Xiong received the B.S. degree and
the M.S. degree in computer science from Chongqing University, Chongqing, China, in 2003 and 2006 respectively. She is currently a Lecturer with the School of Electrical and Information Engineering, Chongqing University of Science and Technology. Her research interests include artificial intelligence, web application and bilingual teaching.
Chao Liu received his Ph. D degree from Chongqing
Universtiy in 2012. Now he is a Lecturer with School of Electrical and Information Engineering, Chongqing University of Science and Technology, People's Republic of China. His current research interests include impulsive systems, switched systems and neural networks.
Jun Peng is a professor with School of Electrical and
Information Engineering, Chongqing University of Science and Technology.
Lepeng Song is professor with School of Electrical and
Information Engineering, Chongqing University of Science and Technology.
Sijing Liu is assistant with School of Electrical and Information