2016 6th International Conference on Information Technology for Manufacturing Systems (ITMS 2016) ISBN: 978-1-60595-353-3
1 INTRODUCTION
It is widely known that mobile application is a human-centric discipline, and people’s life becomes more and more inseparable from it. Studies on localization have attracted extensive attention. Pinxuan D, et al [1] conducted a study which discussed campus guiding and positioning system based on android embedded operating system. But GPS in android has an error of dozens of meters, improving the positioning accuracy is necessary before introducing it into this system. In this paper, authors propose an approach to improve the location accuracy and get a smooth trajectory without jump points in Baidu Map. All we need is the information obtained from sensors such as GPS and direction sensor built in android smart phone and road information. With the assistance of this paper’s approach, the performance on the experimental data is effective and the requesters can obtain accurate results in our campus guiding and positioning system.
2 BACKGROUNDS & LITERATURE REVIEW
2.1 Backgrounds
In Baidu LocSDK,no matter what kind of position technology (GPS, Wi-Fi, and Base Station) is chose, there will be certain errors duo to various factors. Improving both the receiving data accuracy and map accuracy is usually the optimal solution. However,
the cost of these methods is too high. Thus, data processing and map matching technologies are such software correction methods. The GPS receiver will go on a real-time data collection, separation and an exact coordinate conversion. What’s more, methods of map- matching algorithm and position correction are used to reduce the errors of GPS positioning. 2.2 Literature Review
Bernstein et al [3] conducted a comparative analysis of existing geometric map-matching algorithms including point-to-point, point-to-curve and curve-to-curve approaches and concluded that the accuracy problem cannot be sole resolved by the geometric approach. Honey et al. proposed a probabilistic map-matching algorithm in which an elliptical or rectangular confidence region was defined around a position to fix information obtained from a navigation sensor. Quddus et al [4] pointed out that most of the topological approaches are sensitive to outliers and unreliability at junctions where the bearing of the connected roads are changed a lot.
Recently, advanced map-matching algorithms use Kalman filters, belief theory and the Fuzzy logic model in the map-matching processing.
Bevermeier et al [5] proposed a robust location estimation algorithm especially focused on the accuracy in vertical position. A loosely-coupled error state space Kalman filter, which fuses sensor data of an Inertial Measurement Unit and the output of a Global Positioning System device, is augumented by height information from an attitude measurement unit. This unit consists of a barometric altimeter
Research on Map-matching Algorithm Using Kaman Filter to
Improve Localization Accuracy from Baidu Map Based on Android
Pinxuan Dai, Zhen Li
Jiangsu University of science and technology, Zhenjiang, Jiangsu, China
Jie Wang
Nanjing University, Nanjing, Jiangsu, China
whose output is fused with topographic map information by a Kalman filter to provide robust information about the current vertical user position. These data replace the less reliable vertical position information provided the GPS device. Xiaolan W proposed a Self-help guide system based on Android platform, researching on key technologies such as GPS positioning, path analysis, map matching and phonetic explanation. Her study can provide automatic positioning, scenic spot guiding, route guidance and map display services for tourists.
3 ARICHITECTURE OF KALMAN FILTER
MAP-MATCHING METHIOD
3.1 Direct projection map matching method
Direct projection gathers the near roads from GPS location in electronic map database; then calculates the shortest geometry distance of positioning point to each candidate path, and chooses the shorter candidate road to match the best choice; the locations are directly projected to the determined and optimal matching path, and the matching points representing the GPS coordinates, are used as the current location information of the vehicle or pedestrian. The methods only use longitude and latitude coordinates, Some effections such as direction, speed, historical track and matching error information are not used. This method’s correctness and reliability are general. Figure 1 summarizes the flow chart of direct projection method.
Figure 1. Flow chart of direct projection map matching. 3.2 Kalman filter map matching method
The Architecture of the Kalman filter Map matching method is showed in Figure2. Firstly, GPS information such as latitude, longitude, speed,
direction and historical tracks are obtained from the GPS module, Secondly, adaptive Kalman filter is used to filter out original GPS data’s dynamic noise and measurement noise. Thirdly, coordinate transform is used to subscribe the GPS data points to Baidu Map. Fourthly, direct projection method is applied to obtain the optimal position and they are displayed on the electronic map. Finally, the optimal result obtained from the process is interpolated to make the trajectory have more details.
Figure 2. Kalman filter Map matching implementation.
3.2.1 Get location information
The position information such as latitude, longitude, speed and direction can be obtained from GPS module SIM 808 embedded in Campus Guiding and positioning system. The position data is updated every second. GPS positioning signal uses serial transmission mode by RS232 interface. When SIM808 module is powered on, it would send GPS data out continuously by adjustable baud rate. This data are stored in the form of a byte stream in the cache, which contains a variety of NMEA0183 statements. Therefore, it is necessary to extract the useful information in NMEA0183 to provide the data base for the subsequent map matching.
The data frame of GPS receiver is mainly consisted of frame header, frame tail and frame data. For different data frames, the frame header is different, mainly include $GPGGA, $GPGSA, $GPGSV and $GPRMC, which identifies the composition and structure of the data in the following frame. Each Data frame uses <CR> and <LF> as frame tail. Each Data frame are separated by commas and the number of commas are different. We can judge the data frames and extract latitude, longitude information by calculating the frame header, frame tail and the number of commas in different positioning statement, and finally make corresponding filtering calculation and storage.
3.2.2 Utilizing Kalman filter to get optimal current position
Kalman filter is an optimization method of data processing. It is used to eliminate the noise to get an optimal value. Here Kalman filter is redefined to fuse the road, speed, and direction information to get the optimal current position.
The state vector X(k) is defined as
=
Lon
k) Lat
(
Where Lat is a latitude and Lon is a longitude. X(k|K-1) is an estimation of X(k|K) in K time and is defined as
) 1 K | ( X ) 1 K | (
X k − = A1 k − (2)
Where X(k|K-1) is the optimal value of K-1 time and A1 is the transfer matrix of the system defined as
+ + = Lon Lat 1 inc 0 . 1 0 . 0 0 . 0 inc 0 . 1
A (3)
Where incLat is the increment of Lat and incLon is the increment of Lon. The two incremental parameters can be calculated as
− = − = j j 1j Lon 1 Lat / ) ( inc F / ) F F ( inc F F F w w
w (4)
Where F1w and F1j are predicted positions after one second according to the current speed and direction.
P(K-1|K-1) is defined as the covarance of X(K-1|K-1) and P(K|K-1) is the covarance of X(K|K-1). P(K-1|K-1) is calculated by
Q )A 1 1 -AP(K 1) -K
P(KM = MK − T + (5)
Where Q is the noise matrix of the sytem. The road witdth is always between 10 meters to 20 meters. To simplify the process, Q is assigned as
× × = − − 8 8 10 0 . 1 0 . 0 0 . 0 10 0 . 1
Q (6)
X(K|K) is the optimal value of Ktime and can be calculated as
+ = X(K K -1)
K)
X(KM M
)] 1 HX(K
-Kg(K)[Z(K) MK − (7)
Where Kg(K) is an incremental matrix, H is unit matrix. Kg(K) and H are defined as
R )H /HP(K 1)H -P(K
Kg(K) = MK T MK T + (8)
= 0 . 1 0 . 0 0 . 0 0 . 1
H (9)
Where R is the noise matrix of the measured value. Because the GPS built in android smart phone has a low accuracy, R is assigned as
× × = − − 8 8 10 0 . 2 0 . 0 0 . 0 10 0 . 2
R (10)
Z(K) is the measured value which is defined as the nearest point in the interpolated road GPS points array to X(K-1|K-1).
In order to complete the iteration, calculating P(K|K) is necessary. P(K|K) is defined as the
covariance of X(K|K). P(K|K-1) can be used to calculate P(K|K) as the following.
) 1 )P(K ) ( -(I K)
P(KM = Kg K H MK − (11)
3.2.3 Coordinate Transform
Because of the law rules, Chinese maps adopt 54 Beijing Coordinate System or 80 Xi’ an Coordination System. The difference between GPS maps and such Chinese maps can reach 0-120m. Therefore electronic maps can be used by various navigation devices only after its WGS-84 coordinate system is transformed into the 54 Beijing Coordinate System and their map pixels have to be made correspondent to each other. China electronic map service providers always add their map data with map migration and encryption. The encryption offset, is actually a map of the migration algorithm of the latitude and longitude of a modified offset. Along with GCJ-02 encryption method provided by National Bureau of Surveying and mapping geographic information, Baidu Map, uses DB-9 secondary encryption method further to protects personal privacy. Baidu map developers can complete coordinate transform by its coordinate conversion interface.
3.2.4 Road Matching
Candidate roads are confirmed on the basis of the user’s current position information. The best choice is made according to the principle of the shortest distance and same detection. The shortest distance principle means choosing the nearest road to the user and the same direction principle means the direction of the selected road matches the user’s move direction.
Assume that dis_AB is the distance between point A and point B. dis_AB is calculated by the Halverson method as
=
AB _ dis
(
)
( )
(
)
[
sin B - A /2 cosB sin B -A /2]
j 2 2 j w w
w + ×
(12) Where R is the radius of the earth and R is 63710004 meters. Aw and Aj are the latitude and longitude of the point A, so are Bw and Bj.
Assuming that vehicle are driving around road AB, the point A is A(a1,a2), the point B is B(b1,b2), and the location estimation point between AB is C(c1,c2). Geometric distance of C(c1,c2) to line AB is d(C,AB), the corresponding point of C(c1,c2) to AB is P(x,y), and it can be calculated as
1 2
1 1 2 2
1 c ) (
x a
k
a a
c
k +
+ − + −
= (14)
2 2
1 1 2 2
1 c ) (
y a
k
a a
c
k +
+ − + −
= (15)
4 EXPERIMENTAL
4.1 Matlab simulation test
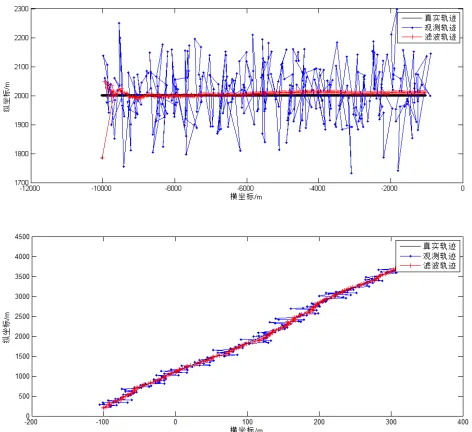
[image:4.612.318.558.35.142.2]The simulation results of Linear and Curve Road are shown in figure 3. In the first figure, the object is making a straight line motion along the y=2000 meter. The observed trajectory is consisted of the real trajectory data, the random measurement noise with the fixed variance and the mean. As can be seen from the graph, the observed trajectory is floating around the real trajectory. Using the Kalman filtering method to measure the trajectory of the track, the moving track is gradually close to the real track.
Figure 3. GPS data processing simulation (straight& curve).
As shown in Figure 4, the Monte-Carlo method is used to simulate the tracking filter, assuming that the number of Monte Carlo simulation is 1000 times. The red curve is a linear track, after Kalman filtering, the blue curve is the 1000 filter mean trajectory. At the beginning, the error is larger, but with time passing, the filter error is reduced, and the estimated value is gradually approaching the true trajectory. By using Monte Carlo method, the average number of the filtered track observations, will be more close to the true track.
Figure 4. Single filter and filter mean trajectory (Straight line). 4.2 Android application test
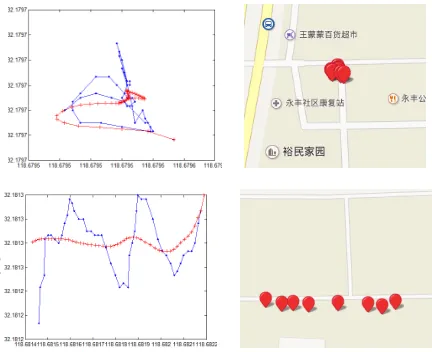
[image:4.612.59.295.322.538.2]Combined with Android campus tour guide system application case, as figure6, tourist is stopped in somewhere or walking along with a liner road. Map-matching algorithm only using the current location information of the tourists will make the matching accuracy declines. We cannot judge whether the visitor is actually stopped in the spot region. Therefore, it is necessary to use history trace to obtain their current position. Here we do experiment on the historical trajectory of "static position" and "moving position" by the Kalman filter map matching method.
Figure 5. Android campus tour guide system (JUST Guider).
[image:4.612.317.552.326.635.2]operation. If the tourists are in the strip (Center Road section) of the scenic area, we need calculate the vertical distance between adjacent sections, when the variance is smallest compared to other sections, we can judge visitors are in this area.
[image:5.612.68.284.103.279.2]
Figure 6. Experiment Road Section & Results.
5 CONCLUSIONS
In this paper, the authors proposed an approach to improve the location accuracy from Baidu Map based on Android. Considering the fact that the method trusts the electric map’s accuracy is higher than the GPS data on the smart phone, and so is our android tour guide system’s embedded platform. With the experiment result, we can see the trajectory after processing with Kalman filter is smooth and is always abuts on the road. The approach achieved the goal that our guiding and positioning system set.
As far as we know, this is the first work to improve the location accuracy. There are also some useful works we can do in the future. We can introduce more algorithms with the direction, speed and other factors, and also consider the influence of the road topology. What is more, our campus guiding and positioning system need expanding functions to meet visitor’s needs.
REFERENCES
[1] Pinxuan, Dai & Zhen L.(2015). Campus guiding and positioning system based on Android. Journal of Jiangsu University of Science and Technology (Natural Science Edition) 29(4): 378-381.
[2] Pinxuan, Dai & Wang C.(2016). Design and Implementation of Electronic tour guide system Based on Android embedded platform. Journal of Nanjing Institute of Technology (Natural Science Edition) 14(1): 65-70.
[3] Bernstein, D., & Kornhauser, A. (1996). An introduction to map matching for personal navigation assistants. Geometric Distributions, 122(7), 1082-1083.
[4] Quddus, M. A., Ochieng, W. Y., & Noland, R. B. (2007). Current map-matching algorithms for transport applications:
state-of-the art and future research directions.
Transportation Research Part C Emerging Technologies,
15(5), 312–328.
[5] Bevermeier, M., Walter, O., Peschke, S., & Haeb-Umbach, R. (2010). Barometric height estimation combined with map-matching in a loosely-coupled Kalman-filter. The Workshop on Positioning Navigation & Communication
(pp.128-134). IEEE.
[6] Wang, C., Liang, H., Geng, X., & Zhu, M. (2015). Multi-sensor fusion method using kalman filter to improve localization accuracy based on android smart phone. IEEE International Conference on Vehicular Electronics and Safety. IEEE.