International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)504
Enhancing the Throughput in Wireless Networks using
Optimal CSMA Algorithm
K. Anitha, (M.Tech)
Dept. Computer Science and Engineering, P.V.P Siddhartha Institute of Technology,
Kanuru, Vijayawada 520007, India,
A. Sudhir Babu, M.Tech, (Ph.D)
Associate Professor, Department of CSE, PVP Siddhartha Institute of Technology,
Kanuru, Vijayawada 520007, India,
Abstract— In multi-hop wireless networks, users may compete
for accessing a shared transmission medium. For transmission of packets the Medium Access Layer has to schedule the links carefully with minimum collisions. To achieve the maximal throughput the designing of scheduling algorithms is a challenging problem because of the complex interference constraints among different links. Many scheduling policies have been studied at the MAC layer to maximizing the Throughput known as throughput-optimal scheduling policies. An adaptive carrier sense multiple access (CSMA) scheduling algorithm is used to achieve the maximal throughput without any message passing in wireless networks. In this paper, we extend the algorithms and develop the convergence of these algorithms without time-scale separation which does not assume that the network dynamics converge in between updates of the carrier-sense-multiple-access (CSMA) parameters, and holds for the continuous time Poisson clock model. We specify realistic discrete-time contention and backoff models, and quantify the effect of collisions.
Keywords— TAP, TAM and NCM
I. INTRODUCTION
In communication networks, such as Ethernet or packet radio, throughput is the average rate of successful message delivery over a communication channel. The throughput is usually measured in bits per second (bit/s or bps), and sometimes in data packets per second or data packets per time slot. In wireless networks to achieving high throughput there are two objectives. Those are efficient utilization of Network Resources and Provide fairness to competing data flows. For implementation of these objectives based on congestion level the right amount of traffic should be necessary which was injected into the network by the Transport Layer.
In wireless networks typically require sophisticated “scheduling mechanisms” [1] to carefully select only a
subset of links to be activated at each time due to Interference. The scheduling mechanism which was done by MAC layer needs to solve a difficult nonconvex problem; this becomes the bottleneck of the entire solution. The two maximum weight scheduling algorithms [2] which achieve 100% throughput are LQF and OCF. But in wireless networks its distributed implementation is not trivial. A model of CSMA with collisions for wireless networks is proposed. However for general networks the design and analysis of CSMA schedulers [3] has been an open problem due to the complexity of the interaction. In Carrier Sense Multiple Access (CSMA) schedulers before making an attempt to transmit a packet nodes can sense whether the channel is idle or not. In single-hop networks all nodes are within transmission range of each other, it is well-known that CSMA schedulers have to achieve network capacity in the limiting regime of large networks with a small sensing time. However for general networks the analysis of CSMA schedulers has been an open problem due to the complexity of the interaction among coupled interference constraints.
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)505
between the new and old solutions of exponential random variables.
In this paper, we propose to use random-access based scheduling schemes for wireless networks. We then extend the basic algorithms. This algorithm does not assume that the network dynamics converge in between updates of the carrier-sense-multiple-access (CSMA) parameters, and holds for the continuous time Poisson clock model. Finally we results to more realistic discrete-time contention and backoff models, and quantify the effect of collisions. The tradeoff between long-term efficiency and short-term fairness: short-term fairness decreases significantly as efficiency loss is reduced which is similarly to other distributed scheduling algorithms, the price of optimality without message passing is delay experienced by some nodes.
DISADVANTAGES OF EXISTING SYSTEM
The MWS is NP-complete in general, but hard for centralized algorithms.
By using throughput-optimal algorithms only a fraction of the throughput region can be achieved.
If the network is large LQF is not throughput-optimal.
In node-exclusive model the length of the control part is more when compared to data part.
For general networks the design and analysis of CSMA schedulers has been an open problem due to the complexity of the interaction.
ADVANTAGES OF PROPOSED SYSTEM
The proposed adaptive carrier sense multiple access (CSMA) scheduling algorithm guarantees optimality.
In this model the nodes cannot receive and transmit simultaneously and also they cannot receive more than one packet at a time.
This model used the Poisson distribution model to avoid the repetition of the collisions far into the future.
In control part mini-slots are used to sense the neighborhood activities, and decide the schedule of data transmissions.
This model does not require any message passing.
II. SCHEDULING ALGORITHMS
The wireless scheduling task is challenging due to the simultaneous presence of two characteristics. Those are interference between transmissions, and the need of practical distributed implementation. For any scheduling algorithm the interference effects result in a fundamental upper limit on the data rates. According to this fundamental limit, or capacity region, serves as a benchmark and the performance of various distributed scheduling algorithms can be compared.
A.Maximum Weight Scheduling Algorithm
[image:2.612.332.551.386.524.2]Maximum weight scheduling is a well known procedure for scheduling data packets in a packet-switched best-effort communications network. In MWS [5], time is assumed to be slotted and the maximal weights are scheduled (The weight of a set of links is obtained by the summation of their queue lengths). In input-queued switch with the arrivals must be independent and uniform.
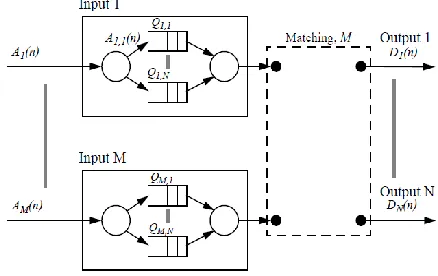
Figure I: An Input-Queued cell Switch Components
In Figure I, we showed how the “input-queued cell
switch” connecting M inputs to N outputs. The arrival process Ai(n) at input I must be1 ≤ i ≤ M. At the beginning
of each slot, either zero or one cell arrives at each input.
Each cell which was arrived contains an identifier that indicates output j and it must be 1 ≤ j ≤ N, which is destined for. When a cell destined for output j arrives at input i that was placed in the FIFO queue Qi,j which has
occupancy Li,j(n). We refer to Qi,jas a virtual output queue
(VOQ). Define the following vector which represents the occupancy of all queues at slot n will be
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)506
Similarly, The waiting time is defined as the number of time slots spent in the queue by the cell at the head of VOQ
Qi,j at time slot n. The following vector represents the
waiting time of the head-of-line cells at all VOQs at slot n
is
W(n ) ≡(W1, 1 (n) ....., W1, N (n) ……, WN, N (n)) T
I) LQF (Longest Queue First) Algorithm: LQF considers the queue occupancy by assigning a weight wi,j(n) = Li,j (n).
In this Queues with larger occupancy will be assigned a larger weight and are thus more likely to be served. It results in 100% throughput. But LQF can lead to the permanent starvation of a non-empty queue.
II) OCF (Oldest Cell First) Algorithm: The Second algorithm, OCF overcomes the starvation problem of LQF by considering the waiting times of cells at the head of each VOQ (virtual output queue). OCF considers the waiting time by assigning a weight wi,j(n) = Wi,j(n). In OCF
cells that have been waiting the longest time will be assigned a larger weight, and are thus more likely to be served. It is clear known that no queues will be starved of service indefinitely, whether a cell is not served, its waiting time will increase.
B. Distributed algorithms for two-hop interference model
A polynomial-complexity algorithm [6] for the “two-hop interference model” is proposed and also developed distributed algorithms. Mainly NP-hard is the problem of the previous algorithms. With the packet transmissions in parallel, PICK and COMPARE algorithms are implemented. Each implementation of PICK and COMPARE algorithms together with concurrent data transmissions is referred as a stage. At the beginning of each stage the schedule is used for packet transmissions. Packet transmissions are performed according to the schedule and updated at the beginning of that stage. Since the same medium is shared, the data packet transmissions are colliding with the control messages generated by these algorithms. To prevent such collisions, time is divided into two intervals, namely the control signaling interval (CSI)-during this time control messages are locally communicated, and the data transmission interval (DTI)-during this time the data packets are transferred (See Figure II). Notice that both PICK and COMPARE algorithms operates during CSI, here the queue lengths are updated during DTI. Finally, we assume that each transceiver can perform the carrier sensing during transmission without the need to decode its reception.
CSI DTI CSI DTI ……… CSI DTI time
……….. Stage i ……….
Figure II: Division of time into data transmission and control signaling intervals.
It is important to note here that the overhead introduced by the control signaling. This fact follows from the fixed amount of control messages required by the algorithm per stage. Thus, by increasing the stage duration the number of control messages versus the data messages in a stage can be made negligible.
I) PICK Algorithm: A distributed algorithm is used to randomly pick a feasible. In order to create a feasible allocation the idea is to send Ready-to-Send (RTS) and Clear-to-Send (CTS) packets including the ID numbers of the nodes.
II) COMPARE Algorithm: In this, a distributed algorithm is used which compares the total weight associated with two feasible schedules with local control signal transmissions, also choose the one with the larger weight as the schedule to be used during the next stage.
C. Distributed CSMA Algorithm
In distributed adaptive CSMA algorithm [7] under certain assumptions sensing is immediate such that at the same time two or more links cannot try to transmit; due to this sensing collisions are avoided. Here time can be viewed as discrete minislots. In the same minislot if multiple links try to transmit collisions are happen. If a collision happens, all links which are involved in are losing their packets, and they will try to transmit again after some Random time.
1
6 2
3
5
4
F
E A
B
C
D
Link 1
Link 2
Link 3
Link 4 Link 6
Link 5
[image:3.612.339.544.154.199.2] [image:3.612.358.552.569.668.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)507
1 2 3
C
D E
F A
B
[image:4.612.73.253.544.615.2]Link 1 Link 2 Link 3
Figure IV: Ad-hoc Network a) Network Topology b) Conflict graph of the Ad-hoc Network
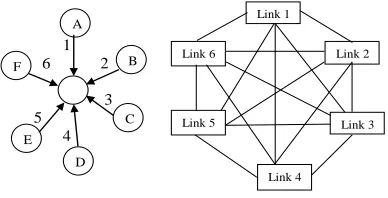
The above figure depicts the basic model. Figure III(a)
shows a wireless LAN with 6 links. Assume that all links can sense the transmissions of each other. The network’s conflict graph is a full graph (Figure III(b)). (Circles represent nodes and squares represent links.) Figure IV(a)
shows an ad-hoc network with 3 links. Assume that link 1, 2 conflict, and link 2, 3 conflict. Then the network’s conflict graph is Figure IV(b).
III. CSMAMARKOV CHAIN
[image:4.612.328.558.568.697.2]Markov model is used to develop a product form solution to efficiently analyze the throughput of arbitrary topology. In this model [8] the nodes cannot receive and transmit simultaneously and also they cannot receive more than one packet at a time. If two (or more) transmissions are heard simultaneously by a node (this is called a “collision”), at least one and possibly both transmitted packets are “lost” and must be retransmitted. When collisions occur, the retransmissions are scheduled at each node for a random time sufficiently to avoid repetition of the collisions far into the future. We depict the topology of the network by a graph in which nodes are connected by a link if they can hear each other’s transmissions (i.e., if they are neighbors).
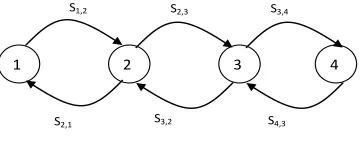
Figure V: A graph represents a network topology
From Figure V node 1 can hear node 2, but not node 3, node 2 can hear both nodes 1 and 3, and node 3 can hear node 2, but not node 1. If node 1 begins its transmition to node 2 and at the same time node 3 begins its transmition, then the transmission from 1 to 2 may be lost depending upon the “capture” assumptions made. The conservative assumption that the node 1 to node 2 transmission is lost is
known as zero capture. Alternatively, perfect capture assumes that this transmission is successfully received because the receiver has time to “lock on” to that node. This model is not valid when a protocol introduces a bias in the length statistics of packets rescheduled because of collisions.
IV. RANDOM ACCESS BASED SCHEDULING
In the network to achieve large stability region under unsaturated arrivals of traffic at each node we can use the random access by exchanging the queue-length. For saturated arrivals, the utility function must be maximized, which captures the efficiency and fairness at the equilibrium. It has been studied for slotted-Aloha random access
A. Slotted Aloha
Slotted Aloha [9] is the simplest random access medium access control (MAC) protocol for wireless systems. In this protocol time is divided into different slots. At the beginning of each slot, each link accesses the channel. With a given probability this accessing will be done and the corresponding transmitter has some packets to send. Assume that we have L links and initially the transmission probabilities p = (p1, p2, p3 . . . , pL) on the links are fixed. If the links are always backlogged, then the long-term throughput achieved on link l is given by
µl (p) =
)
(
)
1
(
l
I
l
p
p
l lHere I(l) denotes the set of links interfering with link l. The rate region SA of slotted Aloha algorithms is introduced as the set of rate vectors µ(p) = (μ1(p), . . . , μL(p)) that can be achieved on various links on transmission probabilities p. T is the set of achievable rates using centralized scheduling algorithms.
Figure VI: difference between rate regions of slotted Aloha and Centralized scheduling algorithm.
S1,2 S2,3 S3,4
S3,2 S4,3
1 2 3 4
International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)508
In Figure VI, we stress the difference between SA and T for the simplistic network of two interfering links. This difference illustrates the well-known inefficiency of slotted-Aloha protocols. All scheduling schemes based on these protocols inherit this inefficiency.
B. Random access schemes with constant time control phase
The inefficiency of slotted-Aloha stems from the inevitable collisions and a lack of proper contention control. Interfering links with non-negligible transmission probabilities experience frequent collisions. To alleviate this problem, each time slot is divided into two parts: a control part and a transmission part. The control part has M mini-slots. The M mini-slots are used to sense the neighborhood activities, and decide the schedule of data transmissions.
C. CSMA
The random access algorithms have suboptimal, poor performance, and require message passing. Without message passing has optimal where each link accesses the channel with a fixed probability, are able to provide average throughputs close to optimality. In the case of unsaturated users, when the number of packets waiting in a user’s buffer becomes large, this user becomes more aggressive and increases its channel access rate. In the present paper, we provide a formal proof of convergence of adaptive CSMA based algorithms that are extensions of those proposed previously, without the timescale separation assumption. The proof is based on recent advances in the understanding of stochastic approximation algorithms with controlled random noise. The proposed algorithms are then shown to maximize network utility in the continuous-time model. In the slotted-time model, a tradeoff between long-term efficiency and short-long-term fairness is revealed.
V. OPTIMAL CSMA
Recently it has been suggested that in wireless networks, without any message passing CSMA-based distributed MAC algorithms could achieve optimal utility. The short-term fairness practically achieved by these algorithms.
A. Model and objective
Consider a wireless network which is composed of a set L of L links. Here interference is modeled by a symmetric, boolean matrix A ε {0, 1} L×L and Alk = 1 if link k interferes with link l, otherwise Alk = 0. A schedule m ε N is a subset of non-interfering active links. Here we assume that the transmitters can transmit at a fixed unit rate when
the links are in active state. A scheduling algorithm [10] decides at each time which links are activated. In the case of saturated users, the objective is to design a scheduling algorithm maximizing the total network-wide utility. The main challenge reduces to developing a distributed and efficient scheduling algorithm.
B. Efficiency of CSMA
CSMA-based random access algorithms are the most widely used distributed scheduling algorithms in wireless networks. They are based on random backoff algorithms such as the Decentralized Coordinated Function. The two basic principles behind CSMA schemes are: (i) to detect whether the channel is busy before transmitting, and to refrain from starting a transmission when the channel is sensed busy, and (ii) to wait a random period of time before any transmission to limit the probability of collisions.
C. Optimal adaptive CSMA algorithms
We now describe a generalized, adaptive CSMA based algorithm. The algorithm is an extension of those proposed previously, and does not require any message passing. Time is divided into frames of fixed durations, and the transmitter of each link updates its CSMA parameters (i.e., λl and μl for link l) at the beginning of each frame. To do so, it maintains a virtual queue, denoted by ql[t] in frame t, for link l. The algorithm operates as follows:
D. Optimal CSMA Algorithm
The variables used in Algorithm are defined in discrete time (i.e., at the beginning of each slot), and are for each link l: pl[t], which represents for this link the channel access intensity during slot t in the CSMA protocol, and can be split into the attempt intensity λl[t], the channel holding time is 1/µl[t] and 1/µl[t] = pl[t]/λl[t]. Here an intermediate variable ql[t], that will be directly related to pl[t]. λl is the transmission intensity, µl is the transmission duration. During slot t, under a continuous-time CSMA protocol the network operates with parameters λ[t] and µ[t] for all l.
• The transmitter of link l runs CSMA and records the amount of service Sl[t] received during this frame.
• At the end of frame t, it updates its CSMA parameters and queue
q
l
t
1
will beInternational Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)509
• For next time slot it sets λl [t + 1] and µl [t + 1] such
that their product is equal to exp{W(ql[t + 1])}.
• This Algorithm adopts a sequence of time-varying step-sizes a[t], which requires transmitter synchronization.
• Here the weight functions
W
'
(
q
l[
t
])
andW
(
q
l[
t
])
are strictly increasing and continuously differentiable. • The parameter V controls the accuracy of thealgorithm.
•
U
is the Utility of the ChannelSince the performance of CSMA algorithms depends on the products λl and μl only, we have the choice in CSMA to
either update the λl’s (the transmission intensities) and fix
the μl’s (the transmission durations), or to update the μl’s
and fix the λl’s, or to update both the λl’s and μl’s. The
above algorithm converges almost surely when t tends to ∞, and furthermore that appropriate choices of the parameters qmax, qmin and V, it approximately maximizes the network utility.
E. Slotted-time models: Collisions and tradeoff
In Practical implementation, when time is slotted and collisions may occur, we consider the following model for slotted CSMA: With probability pl, the transmitter of link l
starts a transmission at the end of a slot if the slot has been sensed to be idle. If that link is active, it can experience either a successful transmission or a collision. At the end of the slot, when a link is currently successfully transmitting, it releases the channel with probability 1/μl. In the case of a
collision, all interfering links stop to transmit simultaneously. We consider two types of collisions:
I) Short collisions: All the links involved in a collision are release the channel with probability 1/μ at the end of a slot. These short collisions may represent RTS (Request to send)/CTS (Clear to send) -like procedures: The links probe the channel with a small signaling message before transmitting.
II) Long collisions: In slotted CSMA the collision duration is equal to the maximum transmission durations of links involved in the collisions. To model long collisions, we assume that all the links involved in a collision are release the channel with probability 1/μc at the end of a slot, where c denotes the set of links experiencing the collision. Generally Long collisions occur when RTS/CTS procedures are not implemented.
III) Short-term fairness vs. Long-term efficiency: The delay between two successive successful transmissions on a link is very large as well. In other words, to ensure efficiency, we need to sacrifice short term fairness. Another source of short-term unfairness with optimal CSMA is the fact that if a link is interfered with by a lot of links before transmitting it needs to wait until all its neighbors become inactive. This waiting time can be very long, especially if these neighbors do not sense each other. When the link finally gets access to the channel, it then needs to hold the channel for duration in order to achieve throughput fairness. This may considerably exacerbate short-term unfairness.
VI.SIMULATIONS
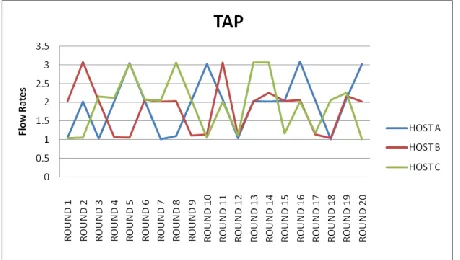
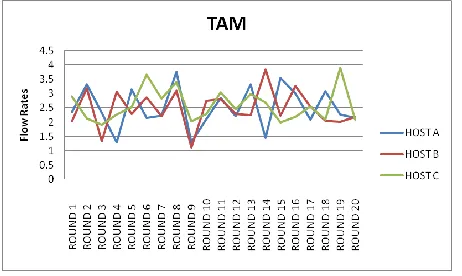
Here we are taking A, B and C nodes which are in wireless networks and observing that how they are sending packets each other. Consider the three variables TAP, TAM and NCM. Here TAP is the time of the failed first attempted transmission, TAM is the time of the failed first attempted transmission of a message and NCM is the number of collisions of the message being transmitted until the time it was successfully reached. And noticed the collision of 20 rounds, each round is estimated as 1 msec. During slot t, under a continuous-time CSMA protocol the network operates with parameters λ[t] and µ[t] for all l.
The transmitter of link l runs CSMA and records the amount of service Sl[t] received during this frame. The
below graphs showed the evolution of the flow rates. After updating the parameters and queue for next time slot it sets
λl[t + 1] and μl[t + 1] such that their product is equal to
exp{W(ql[t + 1])}. The Algorithm adopts a sequence of
time-varying step-sizes a[t], which requires transmitter synchronization
[image:6.612.324.554.535.665.2]International Journal of Emerging Technology and Advanced Engineering
Website: www.ijetae.com (ISSN 2250-2459, Volume 2, Issue 5, May 2012)510 Figure VII(b): Shows the time of the failed first attempted
transmission of a message is still not completed successfully of A, B, C nodes
Figure VII(c): Shows the number of collisions of the message being transmitted until the time it was successfully reached
From Figures VII(a) and VII(b) the collisions of 3 nodes occurred in each round with less flow rates. In Figure VII(c) we observe that the collisions are occurred after a high interval of time and the total service rate of link is not less than the sum of all flow rates on the link. Each link provides a service rate higher than the actual arrival rate. Therefore, the delay is reduced with a small cost in the flow rates.
VII. CONCLUSION
Achieving optimality in terms of throughput and fairness has been known to require scheduling algorithms with message passing. But an adaptive carrier sense multiple access (CSMA) scheduling algorithm is used distributively that can achieve the maximal throughput without any message passing in wireless networks. In this paper, we proposed an optimal CSMA algorithm which is extended based on previous algorithm. This algorithm does not rely on the assumption that the network dynamics converge to
equilibrium in between parameter updates, that indeed this is true for the idealized, continuous-time model. However, there is an exponentially large price to pay in terms of short term fairness in the more realistic, slotted-time model.
VIII.REFERENCES
[1] Xiaojun Lin, B. Shroff A and R. Srikant, “Tutorial on Cross-Layer Optimization in Wireless Networks”, IEEE Journal on selected Areas in Communications, Vol. 24, No. 8, August 2006.
[2] Leandros Tassiulas, Anthony Ephremides, “Stability Properties of Constrained Queueing Systems and Scheduling Policies for Maximum Throughput in Multihop Radio Networks”, Electrical Engineering Department and Systems Research Center University of Maryland.
[3] Peter Marbach, Atilla Eryilmaz, and Asuman Ozdaglar, “Achievable Rate Region of CSMA Schedulers in Wireless Networks with Primary Interference Constraints”.
[4] Eytan Modiano, Devavrat Shah, and Gil Zussman, “Maximizing Throughput in Wireless Networks via Gossiping”, Laboratory for Information and Decision Systems Massachusetts Institute of Technology Cambridge.
[5] Nick McKeown, Adisak Mekkittikul, Venkat Anantharam and Jean Walrand, “Achieving 100% Throughput in an Input- Queued Switch”, Department of Electrical Engineering and Computer Sciences University of California at Berkeley.
[6] Atilla Eryilmaz, Asuman Ozdaglar and Eytan Modiano, “Polynomial Complexity Algorithms for Full Utilization of Multi-hop Wireless Networks”, Laboratory for Information and Decision Systems Massachusetts Institute of Technology Cambridge.
[7] Libin Jiang and Jean Walrand, “Approaching
Throughput-Optimality in a Distributed CSMA Algorithm: Collisions and Stability”,
http://www.eecs.berkeley.edu/Pubs/TechRpts/2009/EECS-2009-37.html, March 6, 2009
[8] Robert R. Boorstyn, Aaron Kershenbaum, Basil maglaris and Veli Sahin, “Throughput Analysis in Multihop CSMA Packet Radio Networks”, IEEE Transactions on Communications, Vol. - 35. No. 3, March 1987.
[9] J. Liu, Y. Yi, A. Proutiere, M. Chiangand H. V. Poor, “Towards utility-optimal random access without message passing”, Wireless Communications and Mobile Computing, Published online in Wiley InterScience.
[image:7.612.49.280.135.273.2] [image:7.612.50.280.319.455.2]