Implement High Bandwidth Data Transmission in Mobile Sensor using
Distribute Three Hop Routing Protocol
S. Nithya
1C. Prakash Narayanan
2B. Sakthivel
31
PG Scholar
2Assistant Professor
3Head of Dept.
1,2,3
Department of Computer Science
1,2,3
P.S.V College of Engineering & Technology, Krishnagiri, TN, India
Abstract— Hybrid wireless network systems combination
the benefits of both mobile ad-hoc networks and infrastructure wireless networks have been receiving increased attention due to their ultra-high performance. An effective information steering convention is essential in such systems for high system limit and adaptability. Be that as it may, most directing conventions for these systems just consolidate the impromptu transmission mode with the cell transmission mode, which acquires the disadvantages of specially appointed transmission. This paper shows a Distributed Three-hop Routing convention (DTR) for half and half remote systems. To take full favorable position of the across the board base stations, DTR isolates a message information stream into portions and transmits the fragments in a dispersed way. It makes full spatial reuse of a framework by means of its fast specially appointed interface and mitigates versatile passage congestion by means of its cell interface. Besides, sending portions to various base stations at the same time builds throughput and makes full utilization of broad base stations. What's more, DTR essentially diminishes overhead because of short way lengths and the end of course revelation and upkeep. DTR likewise has a blockage control calculation to abstain from over-burdening base stations. Hypothetical investigation and recreation comes about demonstrate the predominance of DTR in examination with other steering conventions regarding throughput limit, versatility and portability strength. The outcomes additionally demonstrate the adequacy of the blockage control calculation in adjusting the heap between base stations.
Key words: Data Transmission, Mobile Sensor, Routing Protocol
I. INTRODUCTION
In the course of recent years, remote systems counting framework remote systems and versatile adhoc systems (MANETs) have pulled in huge inquire about intrigue. The developing want to build remote arrange limit with regards to elite applications has animated the advancement of half and half remote systems. A half breed remote system comprises of both a framework remote system and a versatile impromptu system. Remote gadgets, for example, advanced mobile phones, tablets and PCs, have both a foundation interface and a specially appointed interface. As the quantity of such gadgets has been expanding forcefully in late years, a half breed transmission structure will be generally utilized as a part of the not so distant future. Such a structure synergistically joins the inalienable focal points and overcome the drawbacks of the foundation remote systems and versatile specially appointed systems.
In a versatile impromptu system, with the nonappearance of a focal control foundation, information is
directed to its goal through the transitional hubs in a multi-hop way. The multi-jump directing requirements on-request course disclosure or course upkeep. Since the messages are transmitted in remote channels and through unique steering ways, portable impromptu systems are not as dependable as foundation remote systems. Encourage more, on account of the multi-hop transmission highlight, portable impromptu systems are appropriate for neighborhood transmission.
Fig. 1(a): Traditional routing algorithm on the uplink direction.
Fig. 1(b): Our proposed routing algorithm on the uplink direction
[image:1.595.298.534.248.604.2]productivity, yet experience the ill effects of higher power utilization on portable hubs and the single purpose of disappointment issue. A cross breed remote system synergistically consolidates a foundation remote system and a portable adhoc system to use their focal points and overcome their weaknesses, lastly builds the throughput limit of a wide-territory remote system. Be that as it may, coordinate mix of the two transmission modes acquires the accompanying issues that are established in the impromptu transmission mode.
High overhead. Course revelation and upkeep bring about high overhead. The remote arbitrary access medium get to control (MAC) required in versatile specially appointed systems, which uses control handshaking and a backoff instrument, additionally builds overhead.
Hot spots. The versatile door hubs can undoubtedly progress toward becoming problem areas. The RTS-CTS arbitrary access, in which most movement experiences a similar entryway, and the flooding utilized in portable specially appointed steering to find courses may fuel the problem area issue. Likewise, versatile hubs just utilize the divert assets in their course heading, which may produce problem areas while leave assets in different ways under-used. Problem areas prompt low transmission rates, extreme system clog, and high information dropping rates.
Low unwavering quality. Dynamic and long steering ways lead to inconsistent steering. Clamor obstruction and neighbor impedance amid the multi-jump transmission process cause a high information drop rate. Long steering ways increment the likelihood of the event of way breakdown because of the exceedingly unique nature of remote impromptu systems.
To overcome the previously mentioned inadequacies, DTR tries to confine the quantity of jumps. The to begin with hop sending disperses the fragments of a message in various ways to completely use the assets, also, the conceivable second hop sending guarantees the high limit of the forwarder. DTR additionally has a clog control calculation to adjust the activity stack between the adjacent BSes with a specific end goal to maintain a strategic distance from activity clog at BSes. Utilizing self-versatile and appropriated directing with highspeed and short-way impromptu transmission, DTR fundamentally expands the throughput limit and adaptability of crossover remote systems by conquering the three deficiencies of the past steering calculations. It has the accompanying highlights: Low overhead. It wipes out overhead caused by course
disclosure and support in the specially appointed transmission mode, particularly in a dynamic domain. Hot spot lessening. It mitigates movement clog at
versatile portal hubs while makes full utilization of channel assets through a dispersed multi-way hand-off. High unwavering quality. Due to its little jump way
length with a short physical separation in each progression, it mitigates clamor and neighbor impedance and stays away from the unfavorable impact of course breakdown amid information transmission.
A. Distributed Three-Hop Routing Protocol Algorithm
Stage 1: The Message stream of source hub separate the few sections.
Stage 2: Source hub appropriate the portions to the near(first) Base Station.
Stage 3: After a Base station get the sections needs to forward the Destination hub.
Stage 4: DTR select the neighbor hub in light of the Capacity( every hub Periodically trade their ability level).
Stage 5: The neighbor hub transmit the fragments to Final Base station (close for Destination).
Stage 6: After the goal Base Station gets the fragments of a message it and re-mastermind the portions in to unique message and the sends to Destination hub.
II. RELATED WORK
There are different strategies proposed to enhance directing execution in half and half remote systems. Overviewed various multi-hop cell organize (MCN) models in writing, and contrasted and talked about strategies with decrease the cost of sending for MCNs. The work in examines how to apportion the data transmission to clients to enhance the execution of half and half remote systems. These works are orthogonal to our investigation in this paper and can be fused into DTR to additionally upgrade its execution. The throughput limit of the half breed remote system under various settings has additionally been a dynamic investigate point in the mixture remote system. The works in have examined the throughput of half and half system with n hubs and m stations. Liu et al. Hypothetically contemplated the limit of half and half remote systems under an one-dimensional system topology and a two one-dimensional strip topology. Wang et al. Examined the multicast throughput of cross breed remote systems furthermore, planned an ideal multicast technique in light of found throughput.
III. DISTRIBUTED THREE-HOP ROUTING PROTOCOL
A. Assumption and Overview
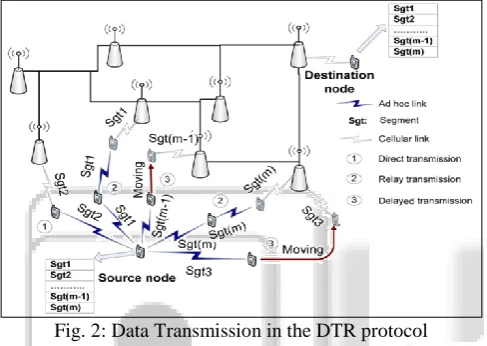
message stream into various fractional streams called fragments what's more, transmits each section to a neighbor hub. Upon getting a section from the source hub, a neighbor hub locally settles on coordinate transmission and transfer transmission in light of the QoS prerequisite of the application. The neighbor hubs forward these portions in a conveyed way to adjacent BSes. Depending on the foundation organize steering, the BSes additionally transmit the fragments to the BS where the goal hub lives. The last BS modifies the fragments into the unique request and advances the fragments to the goal. It utilizes the cell IP transmission technique to send sections to the goal if the goal moves to another BS amid section transmission. Our DTR calculation stays away from the weaknesses of adhoc transmission in the past directing calculations that straightforwardly join a specially appointed transmission mode and a cell transmission mode.
Fig. 2: Data Transmission in the DTR protocol It gets parcels from the TCP layer and courses it to the goal hub, where DTR advances the parcel to the TCP layer. The information steering process in DTR can be partitioned into two stages: uplink from a source hub to the principal BS and downlink from the last BS to the information's goal. Basic issues that should be tackled incorporate how a source hub or transfer hub picks hubs for effective portion sending, and how to guarantee that the last BS sends portions organized appropriately with the goal that a goal hub gets the right information. Additionally, since movement is not equally dispersed in the system, how to maintain a strategic distance from over-burdening BSes is another issue.
B. Uplink Data Routing
A long steering way will prompt high overhead, problem areas furthermore, low dependability. Along these lines, DTR tries to restrict the way length. It utilizes one jump to forward the sections of a message in a disseminated way and utilizations another hop to discover high-limit forwarder for elite directing. Subsequently, DTR limits the way length of uplink directing to two hops with a specific end goal to maintain a strategic distance from the issues of long-way multi-hop directing in the specially appointed systems. In particular, in the uplink directing, a source hub at first partitions its message stream into various portions, at that point transmits the fragments to its neighbor hubs. The neighbor hubs forward sections to BSes, which will forward the sections to the BS where the goal resides.Below, we
initially disclose how to characterize limit, at that point present the route for a hub to gather the limit data from its neighbors, lastly introduce the points of interest of the DTR steering calculation. Diverse applications may have distinctive QoS necessities, for example, effectiveness, throughput, and steering speed. For instance, delay-tolerant applications (e.g. phone message, email and content informing) don't really require quick continuous transmission and may make throughput the most astounding thought to guarantee effective information transmission. In the event that a hub's ability and storage room are changed after its last "hi" message sending when it gets a fragment, it sends its present limit and capacity data to the portion forwarder. At that point, the section forwarder will pick the most elevated limit hubs in its neighbors in view of the most refreshed data. At the point when a source hub conveys message portions, it picks the neighbors that have enough space for putting away a section, and afterward picks neighbors that have the most elevated limit. With a specific end goal to discover higher limit forwarders in a bigger neighborhood around the source, each section beneficiary further advances its got fragment to its neighbor with the most noteworthy limit. That is, after a neighbor hub mi gets a fragment from the source, it utilizes either coordinate transmission or transfer transmission. In the event that the limit of every one of its neighbors is no more prominent than itself, transfer hub mi utilizes coordinate transmission. Else, it utilizes hand-off transmission. In coordinate transmission, the transfer hub sends the section to a BS on the off chance that it is in a BS's district. Else, it stores the portion while moving until the point when it enters a BS's district. In transfer transmission, transfer hub mi picks its most elevated limit neighbor as the second hand-off hub in view of the QoS necessity. The second transfer hub will utilize guide transmission to forward the portion specifically to a BS. Therefore, the quantity of transmission hops in the specially appointed system segment is bound to close to two. The modest number of hops help to expand the limit of the arrange and lessen divert conflict in specially appointed transmission. Calculation 1 demonstrates the pseudo-code for neighbor hub determination and message sending in DTR. The reason for the second hop determination is to discover a higher limit hub as the message forwarder in request to enhance the execution of the QoS requirement. As the area extent of a hub for high capacity hub looking develops, the likelihood of finding higher limit hubs increments. Subsequently, a source hub's neighbors will probably discover neighbors with higher limits than the source hub.
Fig. 3(b): Source node has no higher-capacity neighbors Fig.3 indicates cases of neighbor determination in DTR, in which the source hub is in the transmission scope of a BS. In the figures, the incentive in the hub speaks to its ability. In situation (a), there exist hubs that have higher limit than the source hub inside the source's two-hop neighborhood. In the event that a steering calculation straightforwardly give a source hub a chance to transmit a message to its BS, the high directing execution can't be ensured since the source hub may have low limit. In DTR, the source hub sends portions to its neighbors, which additionally forward the fragments to hubs with higher limits. In situation (b), the source hub has the most elevated limit among the hubs in its two-hop neighborhood. In the wake of getting fragments from the source hub, a few neighbors forward the portions back to the source hub, which sends the message to its BS. Along these lines, DTR dependably organizes information to be sent by hubs with high ability to their BSes. DTR accomplishes higher throughput what's more, quicker information sending speed by considering hub limit in information sending.
C. Downlink Data Routing and Data Reconstruction
As said over, the message stream of a source hub is separated into a few fragments. After a BS gets a section, it needs to forward the portion to the BS, where the goal hub dwells (i.e., the goal BS). We utilize the portable IP convention [32] to empower BSes to know the goal BS. In this convention, every versatile hub is related with a home BS, which is the BS in the hub's home system, paying little respect to its present area in the system. The home system of a hub contains its enlistment data distinguished by its street number, which is a static IP address doled out by an ISP. In a half and half remote system, every BS occasionally produces guide signs to find the versatile hubs in its range. At the point when a portable hub mi moves from its home BS, the BS where mi as of now lives distinguishes mi and sends its IP deliver to the home BS of mi. At the point when a BS needs to contact mi, it contacts the home BS of mi to discover the goal BS where mi as of now lives at. Be that as it may, the goal BS recorded in the home BS may not be the most up and coming goal BS since goal portable hubs switch between the scope districts of various BSes amid information transmission to them. The blend of the source hub's arrangement number and fragment arrangement number finds the stream what's more, the situation of a portion in the steam. So as to coordinate the portions into their right request to recover the first information, the
fragments in the BS are transmitted to the goal hub in the request of the sections' grouping in the first message.
D. Congestion Control in Base Stations
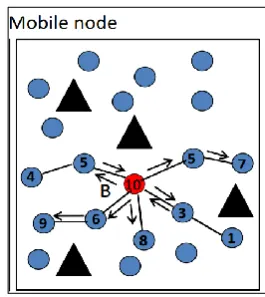
[image:4.595.98.231.65.214.2]It is utilized just when some base stations are over-burden instead of in the typical DTR directing calculation with a specific end goal to keep away from stack clog in BSes.
Fig. 4: Congestion control on BSes
Fig. 4 demonstrates a case of the clog control on BSes when b = 2. As appeared in figure, BS B1 is congested. At that point, the hand-off hubs of the source hub's message communicate locally by reference point piggybacking to find multi-hop ways which prompt B3 and B4. The transfer hubs at that point send fragments along the ways. In this way, the activity initially focusing on over-burden B1 can be spread out to the neighboring BSes B3 and B4. B3 what's more, B4 additionally forward the fragments to the goal BS B6 if B6 isn't congested. In the event that B6 is likewise congested, B3 and B4 send the portions to the neighboring BSes of B6. In particular, B4 sends the fragment to B3. B3 does not forward the fragment to another BS since it as of now is near B6. B3 at that point finds a multi-hop way to the goal hub and uses specially appointed transmission to forward the sections to the goal hub. Also, when B2 needs to send a section to the goal hub, it moreover utilizes a multi-jump way for the portion transmission.
IV. PERFORMANCE ANALYSIS OF THE DTR PROTOCOL
We expect that the transmission scope of all portable hubs and all BSes is (R > h). In this paper, we utilize convention display [17, 33] to portray the obstruction among hubs; that is, a transmission from a hub (here "hub" can be either versatile hub or BS) vi to another hub vj is effective if the
accompanying two conditions are fulfilled:
1) vj is inside the transmission scope of vi, i.e., where
jvi−vjj speaks to the Euclidean separation between vi
and vj in the plane.
2) For some other hub vk that is at the same time
[image:4.595.344.512.146.304.2]interchanges in framework mode (between versatile hubs and BSes through cell interface) would not create impedance to specially appointed mode.
Pr(n(S)=k)=(σS)ke-σS, k=0,1,2,---(1)
| vi - vj| --- (2)
| vk - vj| ≥(1+Δ) | vi - vj| --- (3)
Before computing the total throughput limit of DTR, we initially present Lemma 4.1.
Lemma 4.1: The quantity of cells that have portable hubs is Θ(M).
Lemma 4.2: Let n(σ; M) denote the number of mobile nodes in the whole network.
Lim M ∞ Pr(P(σ, M)= αf(σ, M) is feasible)=1 --- (4)
Lim M ∞ Pr(P(σ, M)= α’f(σ, M) is feasible)<1 ---- (5)
Fig. 5: The traffic load DHybrid and DTR
Hypothesis 4.1: For a mixture system of M BSes and σ portable hub thickness, where every hub has the intra-cell, uplink and downlink sub-channel data transmission fulfilling Widown = Wiup = Wup = W=4; Wiint = Wint = W=2
the total throughput limit of DTR is P(σ; M) = Θ(MW): Verification: To demonstrate P(σ; M) = Θ(MW), we have to demonstrate that there exists deterministic constants α > 0 and α0 < 1 with the end goal that
C1=4/3(3l+2R+ Δ R/3l)2 --- (6)
Lim M ∞ Pr(P(M1= αM )= 1 --- (7)
Lim M ∞ Pr(P(M1= α’M )< 1 --- (8)
V. PERFORMANCE EVALUATION
This segment exhibits the properties of DTR through recreations on NS-2 in contrast with DHybrid , Two-hop and AODV [8]. In DHybrid, a hub first utilizes broadcasting to watch a multi-jump way to its own BS and afterward advances a message in the specially appointed transmission mode along the way. Amid the directing procedure, if the transmission rate (i.e., data transfer capacity) of the following jump to the BS is lower than a limit, as opposed to sending the message to the neighbor, the hub advances the message specifically to its BS. The source hub will be informed if a built up way is broken amid information transmission. In the event that a source makes an impression on the same goal next time, it utilizes the already settled way in the event that it isn't broken. In the Two-hop convention, a source hub chooses the better transmission mode between coordinate transmission and hand-off transmission. In the event that the source hub can discover a neighbor that has higher data transfer capacity to the BS than itself, it transmits the message to the neighbor. Else, it specifically transmits the message to the BS.Unless
generally indicated, the reenacted organize comprises of 50 versatile hubs and 4 BSes. In the specially appointed segment of the crossover remote system, portable hubs are arbitrarily conveyed around the BSes in a field of 1000×1000 square meters. To make the techniques tantamount, we didn't utilize the clog control calculation in DTR unless generally demonstrated.
[image:5.595.311.548.287.428.2]A. Scalability
Fig. 6 demonstrates the normal throughput estimated in kbps per S-D combine of various directing conventions versus the quantity of versatile hubs in the framework. The figure demonstrates the throughput of DTR remains nearly the same with various system sizes. The throughput of DHybrid and AODV diminishes as the quantity of hubs in the system increments. This is for the most part since when the system measure expands, more guide messages are created in the system. Likewise, the long transmission way additionally prompts high transmission obstruction.
[image:5.595.309.548.549.697.2]Fig. 6: Throughput Vs. Networking size (Simulation) The throughput of Two-jump is higher than DHybrid. Nonetheless, since the quantity of message steering jumps is restricted to one, Two-hop may not discover the hub with the best transmission rate to the BSes in light of the fact that of the short transmission scope of the impromptu interface. In this way, the throughput of Two-hop is lower than DTR, particularly in a system with high hub thickness. The reason that AODV has the least throughput per S-D combine is its long transmission ways.
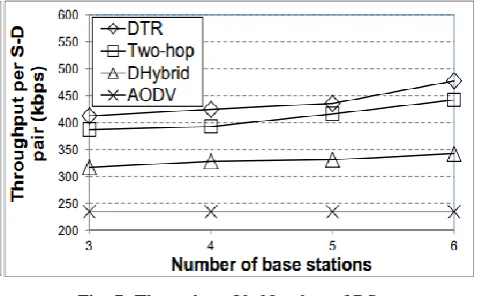
Fig. 7: Throughput Vs Number of BSes.
the throughputs of DTR, Two-hop, and DHybrid increment while the throughput of AODV remains about steady. In DTR, Two-hop, and DHybrid, as the quantity of BSes expands, the aggregate number of hubs near the BSes increments. At that point, more hubs have high transmission rates to the BSes, prompting a throughput increment.
B. Transmission Delay
[image:6.595.316.541.65.210.2]Fig.8 demonstrates the normal transmission deferral of SD sets for effectively conveyed messages in various directing conventions versus arrange measure. The system estimate was shifted from 20 to 100 with 20 increment in each progression. Transmission delay is the measure of time it takes for a message to be transmitted from its source hub to its goal hub. From the figure, we see that DTR produces the littlest deferral. In DTR, each source hub in the first place partitions its messages into littler sections and afterward advances them to the close-by hubs with the most elevated limit, which prompts more adjusted transmission stack circulation among hubs than the past techniques.
Fig. 8: Delay Vs Network Size
Subsequently, DTR has littler idleness than the past techniques. The deferral of DHybrid is 5-6 times bigger than DTR. DHybrid utilizes a solitary transmission way, while DTR utilizes numerous ways. Review that we set the quantity of portions of a message to the association level of the source hub in DTR. Consequently, the proportion of postpone time of DHybrid to that of DTR squares with the normal association degree. As the quantity of hubs in the framework builds, the association level of every hub increments, what's more, the expansion rate of the proportion develops. DTR likewise delivers a shorter transmission delay than Two-jump for two reasons. To start with, the multi-way parallel steering of DTR spares much transmission time as appeared in Proposition 4.1. Second, the dispersed directing of DTR empowers a few messages to be sent to the goal BS's neighboring cells with high transmission rates instead of holding up in the current hot cell for a transmission channel. We can likewise watch that Two-jump produces bring down deferral than DHybrid. This is on the grounds that the postponement of DHybird incorporates the ideal opportunity for setting up a way and for information transmission. Too, the multi-jump transmission part of DHybrid brings about a higher postponement because of the lining delay in each hop. In view of the long separation transmissions without help from a framework organize, AODV produces the longest postponement.
Fig. 9: Delay Vs Number of BSes.
Fig.9 plots the normal correspondence delay per S-D match for effectively conveyed messages versus the number of BSes in various steering conventions. The figure demonstrates that the expanding number of BSes in the framework prompts a correspondence defer diminish between hubs in DTR, Two-hop, and DHybrid, yet does not influence the correspondence delay in AODV. In DTR, Two-hop, and DHybrid, as the quantity of BSes expands, more hubs can remain nearby to the BSes, prompting less correspondence jumps and better transmission connects between hubs what's more, BSes. Along these lines, the transmission delay between the hubs is decreased. Since the correspondence between S-D combines in AODV does not depend on BSes, AODV keeps up consistent correspondence delay.
C. Communication Overhead
[image:6.595.308.551.223.583.2]We utilize the age rate of control messages in the system and MAC layers in kbps to speak to the correspondence overhead of the steering conventions.
Fig. 10: Overhead vs. network size
[image:6.595.49.288.296.446.2]the others. This is on account of without a framework arrange, the messages in AODV travel far from the source hub to the goal hub through much longer ways.
D. Effect of Mobility
[image:7.595.56.279.172.301.2]To perceive how the hub versatility impacts the execution of the directing conventions, we assessed the throughput of these four transmission conventions with distinctive hub mobilities.
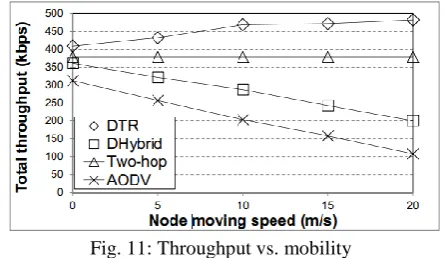
Fig. 11: Throughput vs. mobility
Fig. 11 plots the throughput of DTR, DHybrid, Two-hop, and AODV versus hub moving rate. From the figure, we can see that the expanding versatility of the hubs does not unfavorably influence the execution of DTR and Two-hop. It is interesting to locate that high portability can even help DTR to increment its throughput and that Two-hop creates consistent throughput paying little respect to the versatility. This is on the grounds that the DTR and Two-jump transmission modes needn't bother with to inquiry and depend on multi-jump ways; therefore, they are definitely not influenced by the system parcel and topology changes. In addition, since DTR transmits fragments of a message in a circulated way, as the versatility builds, a portable hub can meet more hubs in a shorter day and age. In this manner, DTR empowers the fragments to be rapidly sent to high-limit hubs. As hub portability builds, the throughput of DHybrid diminishes. In DHybrid, the messages are directed in a multi-jump design. At the point when the connections between hubs are broken as a result of hub portability, the messages are dropped. Accordingly, when hubs have littler versatility, the connections between the portable hubs last longer and more messages can be transmitted. Subsequently, the throughput of DHybrid is unfavorably influenced by hub versatility.
E. Effect of Workload
[image:7.595.309.546.405.579.2]We quantified the aggregate throughput of BSes on the messages got by BSes.
Fig. 12: Throughput of BSes vs. number of source nodes
Fig. 12 demonstrates the aggregate throughput of the BSes versus the quantity of source hubs. We can see that DTR and Two-jump have much higher throughput increment rates than DHybrid. This is on account of in DTR and Two-jump, the quantity of transmission hops from a source hub to a BS is little. In the mean time, every hub can adaptively switch between transfer transmission and direct transmission in view of the transmission rate of its neighbors. Messages are dependably sent to the versatile passage hubs that are nearer to the BSes or that have higher transmission rates. Subsequently, these portable door hubs can undoubtedly wind up congested as the workload of the framework expands, driving to numerous message drops. In this way, when the number of the source hubs is bigger than 4, the throughput of DHybrid remains about consistent. This is likewise the reason that the throughput of DHybrid is continually lower than those of DTR and Two-hop. Also, the figure demonstrates that the general throughput of Two-hop is lower than that of DTR. This is on the grounds that the greater part of the movement in Two-jump is bound to a solitary cell. At the point when a BS in a cell is congested, the movement effectively. What's more, as the sending system gives hubs greater adaptability in picking hand-off hubs with higher transmission rates for message sending to the BSes, the general BS throughput in DTR is bigger than in Two-hop.can't be exchanged to different cells. Conversely, DTR's three-hop appropriated sending component empowers it to appropriate the activity among the BSes in an adjust. Subsequently, the BSes in DTR won't wind up congested .
F. Effect of the Number of Routing Hops
Fig. 13 Throughput vs. number of hops
[image:7.595.49.278.627.755.2]G. Load Distribution within a Cell
[image:8.595.317.543.71.206.2]In this analysis, we tried the heap circulation of versatile hubs in a haphazardly picked cell in the half breed remote system that utilizes each of the DTR, DHybrid, and Two-jump conventions. We standardized the separate from a portable hub to its base station concurring to the capacity D Rb , where D is the genuine separation and Rb is the sweep of its cell. We isolated the space of the cell into a few concentric circles and estimated the heaps of the hubs on each hover to demonstrate the heap appropriation.
Fig. 14: Load distribution in a cell
Fig. 14 demonstrates the normal heap of a hub comparing to the standardized separation from itself to the BS in the picked cell. The figure demonstrates that a large portion of the activity heap of DHybrid is situated at hubs close the BS. The hubs a long way from the BS have low load. The outcomes comply with Proposition 4.3. In DHybrid, if a source hub needs to get to the Internet spine or on the other hand take part in between cell correspondence, it transmits the messages to the BSes in a multi-jump design. In this manner, the hubs close to the BSes will have the most noteworthy load. On the other hand, since there is little movement experiencing the hubs at the overflow of a cell, the heap of these hubs is little. Thus, a few hubs can without much of a stretch progress toward becoming problem areas while the assets of different hubs are not completely used. This heap unevenness anticipates DHybrid from completely using framework assets.
H. Load Balance between Cells
[image:8.595.52.283.189.334.2]In this trial, we tried the adequacy of the clog control calculation in DTR. We additionally included a clog control calculation to DHybrid. In the calculation, when a hub gets reference point messages from its BS showing that it is over-burden, the hub communicates a question message to discover a way to an adjacent uncongested BS. We chose two BSes out of the aggregate four BSes. In the scope of every one of the two chose BSes, we haphazardly chosen one versatile hub as the source hub to send messages to an arbitrarily chose goal hub in the arrange. Once the source hub moves out of the range of the chose BS, another versatile hub in the range was chosen as the source hub. With a specific end goal to demonstrate the stack circulation of the BSes in various conventions, we positioned the BSes in light of BS throughput. The BS with the most elevated throughput has a rank of 1.
Fig. 15: Load distribution among BSes
Fig. 15 demonstrates the throughput of every BS versus the BS rank. We can see from the assume that in Two-hop, the throughput of the initial two BSes is to a great degree high while the throughput of the last two BSes is to a great degree little. This is on account of the two jump directing way length in Two-jump isn't sufficiently long to forward messages from a congested BS to a gently stacked BS. Consequently, the activity can't be moved to the neighboring softly stacked BSes, prompting an unequal load conveyance. We can likewise observe from the assume that in DTR, the change of the throughputs in various BSes is little. The reason is that three sending jumps are sufficient for a portable hub to achieve a neighboring BS and henceforth to adjust the heap between the BSes. In the interim, the clog control calculation in DTR can successfully change the activity from an exceptionally stacked cell to a delicately stacked cell. Likewise, when a hub finds that its present BS is congested, it sets aside quite a while for it to discover a way to a non-congested BS by re-issuing an inquiry message to the neighboring non-congested BS, which enormously decreases the throughput of the framework.
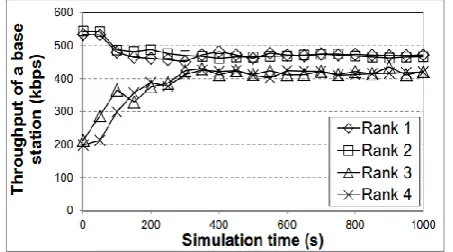
Fig.16(a,b&c) additionally demonstrate the throughput of the BSes versus reenactment time in the three directing conventions. At the starting, the BSes with positions 1 and 2 are congested what's more, those with positions 3 and 4 don't have much activity. Accordingly, the three figures demonstrate that the BSes with positions 1 what's more, 2 have high throughput however those with positions 3 and 4 have to a great degree low throughput toward the start taking all things together three conventions.
[image:8.595.315.542.571.697.2]exceedingly congested BSes is disseminated to the neighboring BSes. As the movement is sent from the BSes of positions 1 and 2 to the BSes of positions 3 and 4, the throughputs of these BSes are fundamentally the same as later in the reenactment. This outcome shows the adequacy of the blockage control calculation in DTR for stack adjust between cells.
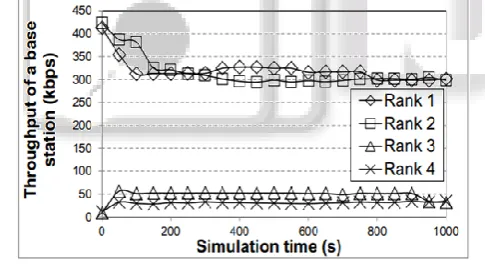
Fig. 16(b): Base station load vs. simulation time with Two-hop
Fig. 16 (b) demonstrates the throughput of the BSes in Two-hop. In Two-hop, since the source hubs can't adequately move the activity between BSes, the BSes with rank 1 and rank 2 continually have the most elevated throughput, while the BSes with rank 3 and rank 4 always have low throughput. The low throughput is created at the point when the prompt neighbors of the source hub are in the scope of the neighboring BSes of the source hub's BS. In any case, the likelihood of such cases is exceptionally little.
Fig. 16(c): Base station load vs. simulation time with DHybrid
Fig. 16 (c) demonstrates the throughput of the BSes in DHybrid. As the hubs in DHybrid can't viably balance the heap between the BSes, the throughput of the BSes of rank 1 and rank 2 is substantially bigger than that of the BSes of rank 3 and rank 4. Contrasting Fig. 16 (b) and Fig. 16 (c), we can find that the throughput in DHybrid is lower than that in Two-jump. This is on account of the multi-jump transmission in the specially appointed system in DHybrid incredibly lessens the throughput. In the interim, the versatile door hubs in DHybrid effortlessly progress toward becoming congested, prompting more message drops.
VI. CONCLUSIONS
Half and half remote systems have been accepting expanding consideration as of late. A half and half remote organize consolidating a framework remote system also, a
portable impromptu system use their points of interest to build the throughput limit of the framework. Nonetheless, current half breed remote systems essentially consolidate the steering conventions in the two kinds of systems for information transmission, which keeps them from accomplishing higher framework limit. In this paper, we propose a Disseminated Three-jump Routing (DTR) information steering convention that incorporates the double highlights of mixture remote organizes in the information transmission process. In DTR, a source hub separates a message stream into fragments and transmits them to its portable neighbors, which further forward the sections to their goal through an framework organize. DTR limits the steering way length to three, and dependably organizes high-limit hubs to forward information. Not at all like most existing directing conventions, DTR creates essentially bring down overhead by taking out course disclosure and support. In expansion, its recognizing attributes of short way length, short-remove transmission, and adjusted stack circulation give high steering unwavering quality and productivity. DTR likewise has a blockage control calculation to dodge stack blockage in BSes on account of unequal movement disseminations in systems. Hypothetical examination and reenactment comes about demonstrate that DTR can drastically enhance the throughput limit and adaptability of half and half remote systems because of its high versatility, effectiveness, and unwavering quality and low overhead.
REFERENCE
[1] H Luo, R. Ramjee, P. Sinha, L. Li, and S. Lu. Ucan: A unified celland ad-hoc network architecture. In Proc. of MOBICOM, 2003.
[2] P. K. McKinley, H. Xu, A. H. Esfahanian, and L. M. Ni. Unicast based multicast communication in wormhole-routed direct networks. TPDS, 1992.
[3] H. Wu, C. Qiao, S. De, and O. Tonguz. Integrated cell and ad hoc relaying systems: iCAR. J-SAC, 2001. [4] Y. H. Tam, H. S. Hassanein, S. G. Akl, and R.
Benkoczi. Optimal multi-hop cellular architecture for wireless communications. InProc. of LCN, 2006. [5] Y. D. Lin and Y. C. Hsu. Multi-hop cellular: A new
architecture for wireless communications. In Proc. of INFOCOM, 2000.
[6] P. T. Oliver, Dousse, and M. Hasler. Connectivity in ad hoc and hybrid networks. In Proc. of INFOCOM, 2002. [7] E. P. Charles and P. Bhagwat. Highly dynamic
destination sequenced distance vector routing (DSDV) for mobile computers. In Proc. of SIGCOMM, 1994. [8] C. Perkins, E. Belding-Royer, and S. Das. RFC 3561:
Ad hoc on demand distance vector (AODV) routing. Technical report, Internet Engineering Task Force, 2003.
[9] D. B. Johnson and D. A. Maltz. Dynamic source routing in ad hoc wireless networks. IEEE Mobile Computing, 1996.
[image:9.595.51.283.150.278.2] [image:9.595.47.290.415.549.2][11]R. S. Chang, W. Y. Chen, and Y. F. Wen. Hybrid wireless networkprotocols. IEEE Transaction on Vehicular Technology, 2003.